4662 Servomoteurs pour volets d`air SQE65.2 SQE65.4

Landis & Staefa CM2N4662F Juin 1997 1/4
4662
Servomoteurs
pour volets d’air SQE65.2
SQE65.4
SQE.../1001 SQE...
Alimentation 24 V~, commande progressive 0...10 V–, course nominale 60 mm,
Force de poussée nominale 150 N, commande motorisée et tringle, sans retour à
zéro. Plage de fonctionnement réglable de 0 à 60 mm. Version précâblée (câble
de raccordement de 1,5 m - sur demande).
Ces servomoteurs sont utilisés dans des installations de ventilation et de climatisation à
débit d’air constant ou variable (VAV) pour manoeuvrer des registres d’air ou des
clapets.
La force nominale de 150 N permet, selon la facilité de manoeuvre des registres,
d’actionner des surfaces de volets pouvant aller jusqu’à environ 1 m2.
Ils conviennent à des régulateurs à action progressive avec signal de commande
0...10 V–.
Référence Tension
d’alimentation Type de
commande Réglage de la plage
de commande Temps de positionnement
max. pour course de 60 mm
(voir «Technique») 50 Hz 60 Hz
SQE65.2
SQE65.4
24 V~ 0...10 V– oui
non
150 s 125 s
SQE65…/1001 avec câble de raccordement de 1,5 m, livré en emballage de 20 (sur demande).
Domaines
d’application
Références et
désignations
Servomoteur

2/4 CM2N4662F Juin 1997 Landis & Staefa
Entraînement ASK55.2 :
Approprié pour des tringles de
Ø 5... 8 mm et 5...8 mm
et pour la limitation de la course.
Fixation sur la tringle.
Ces accessoires sont à commander séparément.
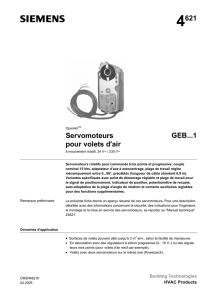
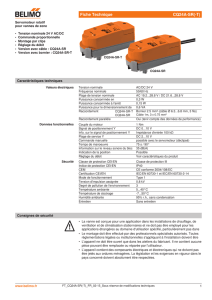
Un signal progressif 0...10V– commande le servomoteur. La course est proportionnelle
à ce signal.
Le potentiomètre «Uo» permet de définir un point de départ dans une plage
0,5 V ...5,5 V– et le potentiomètre «∆U» de régler la plage de fonctionnement.
100
0U
O
∆
U
U
min
U
max
Y (v)
U
Y (%)
S
Grandeur d'asservissement (100 % course = 60 mm)
Signal de commande
Plage de départ
Point de départ
Signal de commande max.
Plage de fonctionnement
Ys
Yu
Uo
Umin.
Umax.
∆
U
4662D03F
Un signal de commande compris entre Umin = 2 V– et Umax = 10 V– provoque une
ouverture de 0...75 % (env. 45 mm).
angle de rotation nominal en %(Umax − Umin) 100 x (10 − 2)
∆U = = = 10,6
angle de rotation effectif en % 75
Potentiomètre Uo = 2,0
Potentiomètre ∆U = 10,6
Servomoteurs électriques, réversibles, ne nécessitant pas de maintenance, avec tringle
linéaire et languette de fixation articulée pour la transmission de la force.
Moteur synchrone, train d’engrenages silencieux.
Couplage à hystérésis magnétique avec transmission de force sans contact mécanique,
ce qui met le servomoteur à l’abri des blocages et des surcharges, même en service
permanent.
Afin de permettre une commande manuelle des clapets, le servomoteur peut être
débrayé à l’aide de la touche «MAN» située sous le capot.
La limitation de course est réglable de 0 à 60 mm.
Commutateur d’inversion du déplacement.
Le carter d’engrenage est en aluminium et le capot en matière plastique.. La partie élec-
trique et le potentiomètre de réglage se trouvent sous le capot.
Le passage des câbles par presse-étoupe (Pg11) ou douille peut se faire aussi bien par
la droite que par la gauche. Il suffit pour cela d’inverser l'embout fileté et le bouchon.
Le servomoteur précâblé est équipé d’origine d’un câble de raccordement de 1,5 m.
Se reporter aux rubriques «Références et désignations» et «Caractéristiques techni-
ques», ainsi qu’aux principes de base relatifs aux systèmes utilisés. Toutes ces infor-
mations doivent être observées en tenant compte d’un signal de commande 0...10 V–.
Accessoires
Remarque
Technique
Réglage de la plage
de commande
Exemple de réglage :
Réalisation
Indications pour
l'ingénierie

Landis & Staefa CM2N4662F Juin 1997 3/4
Choisir une position de montage permettant d’accéder facilement au capot du boîtier et
à l’arrivée des câbles. Les différentes possibilités de fixation et de montage ressortent
des schémas d’encombrements.
En actionnant la touche de débrayage (se référer aux instructions de montage), on peut
facilement ajuster la plage de la course au type du clapet d’air utilisé.
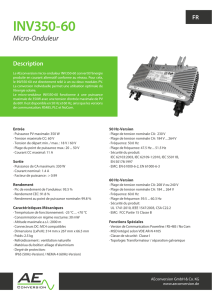
Vérifier la course Il est possible de régler le sens de déplacement à l’aide du commuta-
teur DIL 2. S’assurer que le servomoteur est correctement raccordé.
1
12
1
2
2
4662Z01F
- Réglage usine des commutateurs
- Le moteur continue de fonctionner après contact avec une
butée
Tige en sortie
(Y = 0...10 Vcroissant) 0%......100%
Tige en entrée
(Y = 0...10 V croissant) 100%......0%
Commutateur 1
temporisation
Commutateur 2
sens de déplacement
Commutateurs 1 + 2
- Le moteur s'arrête environ 150 secondes après
contact avec une butée.
- En l'absence de commande de positionnement,
le moteur redémarre au bout de 60 min.
pour une durée d'environ 150 s.
- Chaque nouvelle commande de positionnement
entraîne une réinitialisation de la temporisation
Alimentation (G-G0) 24 V~ ± 20 %
Très basse tension de sécurité selon EN 60730
Utilisation d’un transformateur de sécurité externe (régime permanent) selon EN 60 742
Protection externe des câbles max. 10 A
Fréquence 50 Hz / 60 Hz
Consommation 2 VA
Classe de protection selon EN 60 730 III
Bornes de raccordement (G-G0-Y) pour 2 x 1,5 mm2
Entrée de câble PG 11
Tension (Y-G0) 0...10 V–
Courant d’entrée max. 0,1 mA
Longueur de câble adm. 300 m
protection contre les erreurs de raccordement 24 V ~
Point de départ Uo (réglable par potentiomètre) 0...5 V–
Plage de fonctionnement ∆U (réglable par potentiomètre) 2...30 V–
Inversable 0..60 mm/ 60..0 mm
Limitation du temps de fonctionnement du moteur (commutateur interne) MARCHE/ARRET
Indications pour
le montage
Indication pour
la mise en service
Caractéristiques
techniques
Alimentation
Entrée de commande Y
Caractéristique
Sens de déplacement
Horloge

4/4 CM2N4662F Juin 1997 Landis & Staefa
Force de poussée nominale 150 N
Force de poussée max. < 200 N
Force d’arrêt min. (sans tension) > 150 N
Course nominale 60 mm,
Course maximale (limitation mécanique) < 63 mm
Limitation de course (réglable mécaniquement d’un côté avec l’ASK55.2) 0...60 mm
Temps de positionnement pour course nominale à 50 Hz 150 s
Temps de positionnement pour course nominale à 60 Hz 125 s
Fonctionnement selon CEI 721-3-3
Conditions ambiantes classe 3K5
Température –10...+ 50 °C
Humidité (sans condensation) < 95% H. r
Transport selon CEI 721-3-2
Conditions ambiantes classe 2K3
Température –25...+ 70 °C
Humidité < 95% H.r.
Conditions mécaniques classe 2M2
Protection du boîtier IP 40, selon EN 60 529
Selon les directives de l’Union Européenne
Compatibilité électromagnétique (CEM) 89/336/CEE
Appareils électriques automatiques de régulation et de commande
pour usage domestique et applications similaires selon EN 60 730
Emission de parasites selon EN 50 081-1
Résistance aux parasites selon EN 50 082-2
SQE... avec emballage 480 g
Il est possible de brancher des servomoteurs de même type en parallèle à
condition que la tension d’alimentation reste dans les tolérances prescrites.
Il faut dans ce cas tenir compte de l’éventualité des coupures de courant.
G, G0 alimentation 24 V~.
G potentiel du système (SP)
G0 zéro du système (SN)
Y entrée de commande 0...10 V–
61 min. 200
Pg11 64
8,5
26
M4
46
45,4
64
min. 100
10
50
5,3 117,8
5,3
64,5
68
4,5
6
610
max. 60 125
84,5 131
4652M01
121
= min. 50 mm
20
≈
15
M4 10,5
5...8
M4
7,3 13,5
4,6
3 mm
16
16
10,5
38
≈
6
4652M02
Servomoteur
Conditions ambiantes
Code IP
Conformité
Normes relatives aux produits
Compatibilité
électromagnétique
Poids
Etude
Bornes de
raccordement
4632G01
GY
G0
Encombrements
Dimensions en mm 1996 Landis & Gyr (Europe) Corp. Sous réserve de modifications
1
/
4
100%