Cours_STS1_02_Electromagnetisme

Sommaire
1/27
A.1. ELECTRICITE GENERALE ELECTROMAGNETISME
Sommaire
A.1. ELECTRICITE GENERALE ELECTROMAGNETISME ................................................................................................................................ 1
I) Grandeurs magnétiques : ..................................................................................................................................................................................... 3
I.1) Le vecteur champ d’induction magnétique :
B
.................................................................................................................................... 3
I.1.1) Définition .................................................................................................................................................................................................. 3
I.1.2) Ordres de grandeur .............................................................................................................................................................................. 3
I.1.3) Lignes de champ ..................................................................................................................................................................................... 3
I.2) Le vecteur champ d’excitation magnétique :
H
................................................................................................................................. 5
I.2.1) Définition ................................................................................................................................................................................................. 5
I.2.2) Théorème d’Ampère ............................................................................................................................................................................. 5
II) Lois fondamentales du magnétisme : ............................................................................................................................................................ 6
II.1) Flux d’induction magnétique et fém liée à sa variation : Loi de Faraday ................................................................................... 6
II.1.1) Vecteur normal
n
- vecteur surface
S
...................................................................................................................................... 6
II.1.2) Flux d’induction magnétique:............................................................................................................................................................ 6
II.1.3) Tube d’induction: ................................................................................................................................................................................. 6
II.1.4) Loi de Faraday: .................................................................................................................................................................................... 6
II.1.5) Loi de Lenz ............................................................................................................................................................................................ 7
II.2) Force appliquée sur une particule ou un conducteur : ..................................................................................................................... 7
III) Applications :...................................................................................................................................................................................................... 8
III.1) Déviation des faisceaux d'électrons dans un tube TV: ................................................................................................................. 8
III.2) Effet Hall: .................................................................................................................................................................................................. 8
III.3) Le haut-parleur: ........................................................................................................................................................................................ 8
III.4) Moteur à courant continu: ..................................................................................................................................................................... 8
III.5) Les appareils de mesure magnétoélectriques : ............................................................................................................................... 9
III.6) Les câblages ............................................................................................................................................................................................... 9
IV) Les circuits magnétiques linéaires : .............................................................................................................................................................. 9
IV.1) Linéarisation :............................................................................................................................................................................................... 9
IV.2) Circuit magnétique parfait: ................................................................................................................................................................... 10
IV.3) Conséquences : relations d’Hopkinson: ............................................................................................................................................... 10
IV.4) Analogie électrique: ................................................................................................................................................................................. 10
V) Les circuits magnétiques en régime sinusoïdal : bobine à noyau de fer: ............................................................................................ 11
V.1) Rappels sur la bobine sans noyau de fer en régime linéaire: .......................................................................................................... 11
V.2) Caractérisation de la bobine à noyau de fer en régime linéaire: .................................................................................................. 11
V.2.1) Modélisation de la bobine à noyau de fer en régime linéaire: ................................................................................................ 11
V.2.2) Comportement simplifié dans l’hypothèse de Kapp:
( ) ( )
et ( ) à
fdi t d t
ri t N
dt dt
............................................. 12
V.2.3) Dimensionnement physique d’une bobine ..................................................................................................................................... 13
V.3) Caractérisation de la bobine à noyau de fer en régime non linéaire: saturation du matériau ............................................ 13
V.3.1) Influence du cycle d’hystérésis sur la forme du courant. ..................................................................................................... 13
V.3.2) Expressions des pertes dans les bobines. .................................................................................................................................. 13
V.3.3) Modélisation de la bobine saturée. ............................................................................................................................................... 14
VI) Les milieux magnétiques, aimants permanents: ....................................................................................................................................... 15
VI.1) Domaine de Weiss , paroi de Bloch...................................................................................................................................................... 15
VI.2) Classification: ............................................................................................................................................................................................ 15
VI.3) Courbe de première aimantation d’un matériau ferromagnétique: ........................................................................................... 16
VI.4) Cycle d’hystérésis de divers matériaux ............................................................................................................................................ 17
VI.5) Droite de charge : Calcul de longueur d’aimant .............................................................................................................................. 18
VI.6) Désaimantation : droite de recul ......................................................................................................................................................... 19
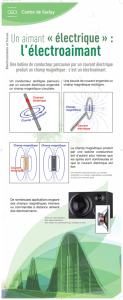
VI.7) Les électroaimants: ................................................................................................................................................................................. 21
VI.7.1) Principe ................................................................................................................................................................................................ 21
VI.7.2) Energie magnétique ......................................................................................................................................................................... 21
VI.7.3) Force générée: .................................................................................................................................................................................. 21

Sommaire
2/27
VI.7.4) Remarques technologiques: ...........................................................................................................................................................22
VI.7.5) Domaines d’application ....................................................................................................................................................................22
VII) Couplage des circuits : ..................................................................................................................................................................................23
VII.1) Rappels sur les inductances:................................................................................................................................................................23
VII.2) Inductances mutuelles: ........................................................................................................................................................................23
VII.2.1) Sans fuites de flux: .......................................................................................................................................................................23
VII.2.2) Avec fuites de flux: coefficients de couplage .....................................................................................................................23
VII.2.3) Remarque pratique.........................................................................................................................................................................24
VII.3) Equations fondamentales .....................................................................................................................................................................24

Sommaire
3/27
I) Grandeurs magnétiques :
I.1) Le vecteur champ d’induction magnétique :
B
I.1.1) Définition
Le champ d’induction magnétique
B
traduit l’effet du mouvement des charges électriques :
02
0
^
4PM
vq
qv u
B r B
r
-7
vitesse de la charge
distance de la charge au point d'expression de
Perméabilité magnétique du vide = 4 .10
C’est une grandeur vectorielle dépendant de l’espace (position) et du temps. L’induction s’exprime en tesla (T).
Si les charges parcourent un conducteur électrique, on écrit localement la loi de Biot et Savart
02
^
4P
P PM
PM P PM
dq
Idu
dB rr d dB u
longueur de circuit portant la charge
distance de au point d'expression de support du vecteur unitaire
La sommation de cette loi permet d’obtenir l’effet de toutes les charges en un point de l’espace.
Si le vecteur champ d’induction est identique en tout point de l’espace, le champ est dit uniforme.
Dans les problèmes technologiques que nous rencontrerons, l’induction magnétique sera une grandeur connue. Elle ne sera pas
à déterminer par les relations précédentes.
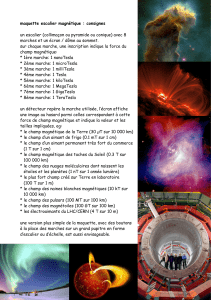
I.1.2) Ordres de grandeur
o 20 µT : champ magnétique terrestre
o quelques 10 mT : aimants ordinaires
o quelques 100 mT : aimants de machines tournantes
o 1 T : champ produit par les enroulements de machines tournantes, transformateurs.
Limites
o 40 T : champ stationnaire produit par plasma, électro aimants supra conducteurs
o 700 T : Champs impulsionnels de laboratoire
I.1.3) Lignes de champ
N
S
B
I
Aimant droit (du N vers S)
Fil parcouru par un courant :
0
2I
Br
(règle de la main droite ou du tire bouchon)
S
N
I
B
Pôle SUD
Pôle NORD
I
B
Aimant en U (du N vers S)
Bobine parcourue par un courant :
0NI
B
(règle de la main droite ou du tire bouchon)


Sommaire
5/27
I.2) Le vecteur champ d’excitation magnétique :
H
I.2.1) Définition
Le vecteur H (exprimé en ampères par mètre (A/m)).caractérise le circuit électrique, source de champ magnétique. Il est
indépendant du milieu où est placé le circuit électrique.
Le vecteur B caractérise le champ magnétique. Il dépend de la source de champ magnétique mais aussi du milieu
Les deux vecteurs sont reliés par la relation :
avec or
B µH µ µ µ
B est en Tesla
H en A/m
µ0 = 4.10-7 V.s.A-1.m-1
µ est relatif au matériau qui canalise B, il peut varier avec H ce qui rend souvent cette relation non-linéaire.
I.2.2) Théorème d’Ampère
La circulation du vecteur champ d’excitation magnétique
H
le long d’un contour fermé (C) orienté par sa normale (règle du
tire-bouchon) est la somme algébrique des courants traversant la surface s’appuyant sur le contour (C).
Le théorème d’ampère décrit la force magnéto motrice f.m.m.
E
d’un contour fermé
()
1
.1
si dans le sens de
si dans le sens inverse de
jj
jj
jjj
C
in
H d i in
E
E
en A. tr (Ampères Tours)
H en A/m
d
en m
I en A
Dans de nombreux cas le choix du contour simplifie le problème. En effet si le contour suit les lignes de champ alors
H
et
d
sont colinéaires donc
()
.
C
Hd
devient
()
.
C
Hd
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%