KROWINSKI Baptiste MASTER Mécatronique NGUYEN Trong Hieu

KROWINSKI Baptiste MASTER Mécatronique
NGUYEN Trong Hieu
Energies
TP n°4 : Moteur Asynchrone alimenté par Onduleur
1. Introduction
Les moteurs asynchrones (moteurs à induction) sont d’une conception moins coûteuse que les
actionneurs à courant continu et synchrone mais leur commande est rendue plus complexe du fait que
le flux n’est pas imposé par un inducteur mais obtenu par induction. Ils sont généralement utilisés en
vitesse variable pour les puissances supérieure à la dizaine de kilowatt.
Durant ce TP, on se propose d’étudier une solution d’actionnement composée d’un moteur
asynchrone, d’un onduleur et de boucles d’asservissement permettant d’asservir le couple. La
simulation sera faite avec le logiciel Matlab ainsi que l’interface graphique Simulink.
2. L’onduleur à MLI
Onduleur triphasé
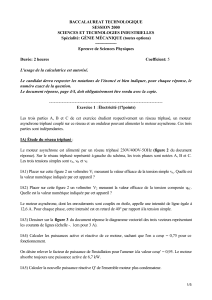
Structure : L’onduleur triphasé est composé de trois bras de pont. Chaque bras de pont (a, b,
c) est alimenté de manière indépendante. Prenons par exemple le bras a. Son signal de
commutation booléen est noté Ca. Pour Ca=1, l’interrupteur du haut (T1) est fermé et celui du
bras (T4) est ouvert. Pour Ca=0, c’est l’inverse. Notons va, vb et vc les tensions entre le point
milieu d’un bras et la cathode du générateur v1. On peut écrire va= Ca*v1. De même, pour les
autres phases, on a vb=Cb*v1 et vc=Cc*v1.
Pour le courant i1, la contribution de ia est Ca*ia et cela va de même pour les autres courants.

D’où : i1 = Ca*ia + Cb*Ib +Cc*Ic.
v = v1*C
i1 = iT*C
On simule et évalue le fonctionnement de l’onduleur sur une charge RL triphasée couplée en
étoile avec une alimentation sinusoïdale à 50Hz. Les valeurs numériques suivantes sont :
- Tension d’alimentation continue 600V
- Valeur efficace de la tension sinusoïdale à 50 Hz
- R=2Ω
- L=100mH
- Fréquence de hachage de 10 kHz
Onduleur triphasé alimentant une charge couplée en étoile
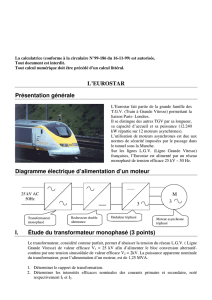
Le schéma du Subsystem de l’onduleur triphasé qui est donnée dans l’énoncé et on ajoute
une charge RL triphasée et trois sinusoïdales déphasées de 2π/3 l’une de l’autre à une fréquence de
50Hz. Le schéma Simulink se trouve ci-dessous:

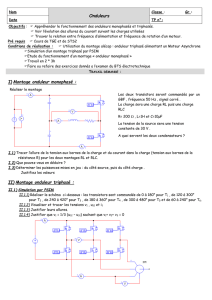
On observe ainsi les trois signaux de courants I2a, I2b et I2c ainsi que la tension V2c, les signaux
obtenus sont les suivants :
Nous voyons bien que les courants I2a, I2b et I2c varient entre + et - 10A et qui correspondent bien à
la valeur souhaitée. On remarquera que les trois courants ici sont bien déphasés de 2π/3.
Dans un premier temps, La valeur obtenue de la tension était le double du résultat ci-dessus. Car le
hacheur était configuré en 4 quadrants. Il fallait donc modifier la formule pour l’avoir en 2 quadrants
pour avoir les valeurs souhaitées. On note bien que la fréquence de hachage est de 10 khz.
Après modification, la tension V2c a bien les caractéristiques d’un onduleur, et varie bien entre +/-
2E/3. La valeur de E est celui de la tension V1 qui est de 600V.

3. Moteur Asynchrone
On implante le modèle de simulation du moteur asynchrone accouplé à une charge inertielle. Les
valeurs numériques suivantes des paramètres sont :
- Inductance cyclique statorique Lcs = 100mH
- Inductance cyclique rotorique Lcr = 100 mH
- Mutuelle inductance cyclique MC=900 mH
- Résistance statorique Rs= 1Ω
- Résistance rotorique Rr=1 Ω
- Puissance nominale 2 kW
- 4 pôles (2 paires de pôles)
- Inertie J = 10 g.m²
- Coefficient de frottement fluide f = 0 à 0.01 N.m / (rad/s)
- Moteur alimenté par un système triphasé équilibré de tension de fréquence de 50Hz et de valeur
efficace 230V.
Le schéma du Subsystem de la machine synchrone est donnée dans l’énoncé et on modifie les
paramètres de notre moteur donnée ci-dessus. Le moteur asynchrone sera alimenté de trois tensions
sinusoïdales déphasées de 2π/3 l’une de l’autre avec une fréquence de 50Hz. On placera une charge
inertielle placée entre le couple moteur et sa vitesse. On en déduit que les trois courants Ia, Ib et Ic
seront à nouveau de formes sinusoïdales et déphasés de 2π/3.
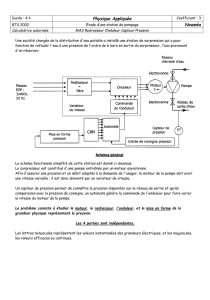
Le schéma de simulation est le suivant :
Pour que le système puisse marcher, on affecte la matrice C32 qui est la suivante :

On obtient bien les courants voulu. Le bloc du rapport cyclique contient un élément qui
permet de saturer les valeurs à ne pas dépasser. C’est pour cela qu’on arrive à obtenir des
formes correctes.
Avec une faible inertie. La vitesse ici augmente vite et se stabilise après quelques oscillations
à sa vitesse nominale.
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%