MRU_MRUA_Tous

MRU – MRUA
Un chariot se déplace le long d‘un rail. L’ordinateur mesure la distance que le chariot fait
et le temps nécessité. Ensuite l’ordinateur calcule la vitesse et l’accélération. L’ordinateur
permet de visualiser la vitesse et l’accélération en fonction du temps.
Cédric Boujong
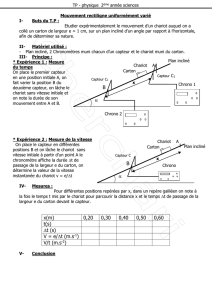
Le déroulement (MRUA)
Cette expérience montre le mouvement rectiligne uniformément accéléré d’un chariot.
Pour l’expérience, il y a une banc à coussin d’air légèrement incliné, un chariot avec un
capteur et un ordinateur qui traite les résultats.
La distance entre l’émetteur US & IR et le capteur n’est pas fixe, le point 0 non plus.
On lance le chariot au point 0 (déterminé) sans vitesse initiale. La trajectoire est rectiligne
et l’ordinateur dessine une droite.
Kevin Weiland
5. Etude expérimentale de quelques mouvements.
5.1. Dispositiv expérimental:
On installe un rail à coussin d'air sur lequel un chariot munit d'un capteur peut circuler
sans frottement. Ce capteur reflète les rayons US et IR qui sont émis par un émetteur fixe
installé à un bout du rail. On pousse le chariot qui glisse le long du rail et le capteur du
chariot reflète les rayons sur l'émetteur fixe qui fonctionne également comme capteur.
Lorsque le chariot se déplace, les rayons mettent plus ou moins de temps pour revenir sur
l'émetteur. Cet émetteur est relié par un convertisseur et par une interface à un ordinateur.
Cette expérience permet de visualiser la position en fonction du temps sur l'ordinateur.
L'ordinateur permet de calculer et de visualiser la vitesse et l'accélération en fonction du
temps.
Jean Haler
5. Etude de quelques mouvements:
5.1. Dispositif expérimental
Sur un rail horizontal à coussin d’air, on place un chariot menu d’un capteur infrarouge et
ultrasons. A une extrémité de ce rail on place de nouveau un capteur mais aussi un
émetteur ultra-sons et infrarouge. Lorsque le chariot se déplace sur le rail spécifique il
n’y a pas de frottement. Le chariot peut se déplacer donc à vitesse constante. Lorsque le
chariot, placée près des émetteurs, est mis en mouvement les émetteurs émettent des
rayons ultra-sons et des rayons infra-rouges. Le capteur du chariot reflètent ses rayons et
ils sont captés par le capteur et transmis à l’ordinateur qui affiche la vitesse moyenne du

chariot. On a besoin de deux rayons différents pour pouvoir faire des mesures exactes.
Les deux rayons ont deux vitesses différentes, une mesure exacte est donc confirmée.
Claude Weynandt
On lance un chariot, portant um capteur US et IR sur un rail à cousin d'air. Sur l'un des
bouts du rail, on place un capteur/récepteur US et IR, qui est relié par un convertisseur et
un interface à un ordinateur.
Puis on définit un point 0 sur le rail( important pour la mesure). On lance ensuite le
chariot. Les ondes IR permettent d'enrégistrer la distance entre chariot et émetteur, l'US
d'enrégistrer le temps que le chariot met pour se déplacer. Par l'ordinateur, on obtient
grâce à ces mesures un graphique qui permet de visualiser la distance parcourue par le
chariot en fonction du temps qu'il nécessite.
Luc Boever
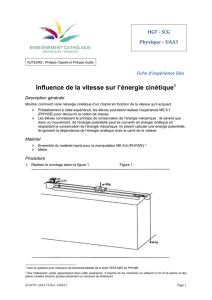
Dispositif expérimental
On a un rail à coussin d’air d’une pente qui tend vers le bas sur lequel est placé un chariot
avec un capteur. Au bout du rail est placé un deuxième capteur avec un émetteur US &
IR. On indique à l’ordinateur ou se trouve le point zéro de sa mesure, après on donne un
petit coup de main au chariot pour qu’il se déplace, comme il y existe une pente on parle
d’un mouvement rectiligne uniformément accéléré. D’abord l’ordinateur mesure la
vitesse de départ, ensuite l’accélération ; avec ces mesures il nous donne le résultat :
x = ½ * ax * t2 + vox * t + x0
ax est l’accélération, mesurée en m par s2 ; t est le temps, mesuré en s ; vox est la vitesse
de départ, mesurée en m par s et x0 est le point de départ 0
Tom Steichen
Dispositif expérimental :
En pose un Chariot avec un capteur US et IR sur un rail à coussin d’air. Le Capteur est
vis-à-vis à un capteur et émetteur US et IR Ensemble l’émetteur fixe et le capteur du
chariot peuvent donner à l’ordinateur les informations desquels il a besoin pour calculer
la position du chariot. Pour éviter le frottement le Chariot et mis sur un rail à cousin
d’air.
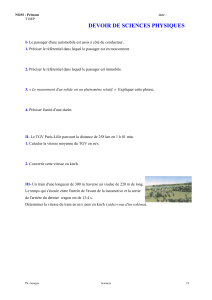
MRU
Pour montrer la courbe du MRU le rail est en axe horizontal. On donne au chariot une
vitesse de mouvement et il la conserve tout eau long de son chemin sur le rail.
MRUA

On met le chariot sur un rail à coussin d’air incliné. Le chariot est posé en haut et il glisse
vers le bas. On peut constater une accélération du chariot.
MRUD
Il faut poser le chariot en bas du rail incliné et l’accélérer par force musculaire. On voit
qu’il est freiné par son poids, jusqu’à ce qu’il retourne vers le bas.
Hermes Tom
Le long d'un rail à coussin d'air on laisse glisser un chariot muni d'un capteur. Ce rail
étant soit horizontal soit incliné, l'expérience permet d'établir les formules soit du
mouvement rectiligne uniforme soit du mouvement rectiligne uniformément accéléré. Le
capteur du chariot étant relié à un capteur et émetteur fixe ultrason et infrarouge, celui-ci
peut transmettre la position du chariot à tout moment à l'ordinateur auquel il est branché
à son tour. L'ordinateur à l'aide des dates reçues calcule la vitesse et l'accélération en
fonction du temps. Ainsi on a réalisé l'objectif de l'expérience:visualiser la position du
chariot en fonction du temps sur un graphique ainsi qu'établir les équations horaires des
deux mouvements.
Sophie Klecker
Physique 2B
Mesure de la vitesse et de l’accélération
Dispositif Expérimental
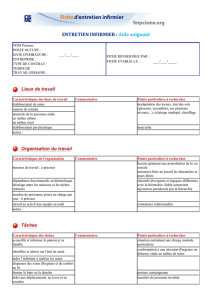
Le dispositif expérimental en question est composé principalement d’un rail à effet de
coussin d’air (donc raccordé à une pompe / une soufflante), soutenu à l’une de ses
extrémités par un objet quelconque de façon à obtenir une pente. Sur ce rail circule un
petit chariot flottant sur le coussin d’air crée par le rail. La mesure s’effectuera dans le
sens de la descente, de façon à ce que le chariot soit accéléré par la simple force
d’attraction terrestre. Le chariot porte en son sommet un petit capteur US et IR, en fait
plutôt un réflecteur. Près de l’extrémité soulevée du rail est placé un émetteur/capteur US
et IR, placé au sommet d’une tige de hauteur adéquate. L’émetteur/capteur est relié, par
l’intermédiaire d’un convertisseur de signaux électroniques et d’une interface à un
ordinateur qui transformera les données de l’émetteur/capteur en courbes.
Avant de mettre en marche le dispositif, il convient tout d’abord de s’assurer que
l’ordinateur est en marche, avec le programme requis pour l’évaluation des données
ouvert, que le convertisseur et l’interface soient bien branchés et que l’émetteur/capteur
et le réflecteur du chariot soient bien alignés. Ces menues vérifications effectuées, l’on
peut mettre en marche la soufflante du rail (afin de créer le coussin d’air nécessaire au
déplacement du chariot), en prenant toutefois soin de maintenir d’une main le chariot en
place au sommet du rail. Une fois l’effet de coussin d’air stabilisé (le chariot semblera
flotter sur le rail), l’on peut lancer l’acquisition de données avec le programme

informatique correspondant, en l’occurrence le logiciel « LatisPro ». Lorsque
l’acquisition est en cours, l’on peut lâcher le chariot. Celui-ci, sous l’effet de la force
d’attraction terrestre, entamera immédiatement sa décente en accélérant. Il est par ailleurs
conseillé de retenir le chariot peux avant la fin du rail, afin d’éviter qu’il soit endommagé
par une quelconque collision. Ensuite l’on peut à nouveau couper la soufflante et le
système d’acquisition de données.
Dès la mise en marche de l’acquisition de données, l’émetteur/capteur émet des rayons IR
en direction du réflecteur placé sur le chariot (pour peux que ces deux éléments soient
proprement alignés). Le réflecteur va –comme son nom l’indique- réfléchir lesdits rayons
vers l’émetteur/capteur, qui va les capter et les enregistrer. A noter que ce processus se
fait continuellement, durant toute la durée de l’acquisition de données.
L’émetteur/capteur va ensuite envoyer les signaux d’émission et de réception des rayons
IR au convertisseur et à l’interface, qui vont calculer la différence de temps entre les deux
moments. Comme la vitesse des rayons IR (en fait de la lumière) est une constante, à
savoir c=300.000km/s ou c=300.000.000m/s, l’ordinateur peut calculer la distance entre
l’émetteur/capteur et le réflecteur en se servant du temps entre l’émission et la réception
du rayon IR, de façon à ce que la distance d est le produit de la vitesse c du rayon
multiplié par le temps t de la course de ce dernier, donc : d = c * t . Bien entendu, ce
calcul est fait en continu.
L’ordinateur dispose donc de nombreux relevés de distances à intervalles réguliers, ce qui
lui permet de calculer à la fois la vitesse, en calculant la différence de deux distances
relevées à deux points précis, qu’il divise ensuite par la différence du temps entre les
deux points en question. Il peut également calculer l’accélération du chariot, ceci en
comparant les vitesses relevées au fur et à mesure de la course du chariot.
Finalement, l’ordinateur doit « simplement » transformer ces innombrables données en
courbes de vitesse et d’accélération à l’aide du logiciel « LatisPro », et - optionnellement
- d’en donner l’équation.
---------------------------------------------------------------------------------------------------------
On place un chariot muni d’un réflecteur sur un rail à coussin d’air. En haut, des
émetteurs US et IR émettent des signaux et captent ceux-ci reflété par le réflecteur sur le
chariot. Ainsi, branchés à un ordinateur on peut calculer la position du chariot.
MRU
Le chariot glisse sur le rail horizontalement, sans qu’il y ait accélération ou décélération.
La vitesse reste constante.
MRUA
Le rail sur lequel le chariot glisse, est incline. Le chariot se met en mouvement lui seul et
la vitesse devient de plus en plus grand. Mais parce que la force qui le tire vers le bas
reste constante, l’accélération aussi reste constante ce qui implique que la vitesse
augmente de façon constante.
MRUV

Cette fois ci, le rail est incliné inversement à la fois précédente. Le chariot monte et la
vitesse diminue jusqu’elle soit nulle et le chariot glisse en arrière, et sa vitesse (en valeur
absolue) augmente. La décélération est constamment négative.
Pol Hornick
1
/
5
100%