VCO 60GHz en technologie CMOS SOI

Chapitre 2
Une méthode de conception
spécifique pour le VCO
Blabla sur le chapitre précédent….
Ce chapitre présente les techniques classiquement utilisées pour la conception de VCO
utilisés dans des domaines de fréquence inférieurs à quelques GHz. Pour les circuits
millimétriques, des concepts différents sont généralement introduits puisque l’approximation
des régimes quasi-stationnaires n’est plus valide. La notion de courant et tension dans un
circuit doit être adaptée puisqu’ils varient en fonction de l’espace (en plus du temps). Nous
rappellerons brièvement les principales notions issues de l’électromagnétisme afin de pouvoir
résumer les méthodes de conception d’oscillateur utilisées au-delà de 30GHz.
Des contraintes de conception inhérentes à ce travail nous ont cependant conduits à
développer une méthodologie à mi-chemin entre ces deux approches. Nous la détaillerons
puis justifierons son intérêt et sa validité. Nous possèderons ainsi le cadre qui guidera la
conception de notre circuit.
II.1. Genèse d’un flot de conception original
II.1.1. Flot de conception RF
II.1.1.1. Vue d’ensemble
Nous décrivons ici le flot conception de circuits intégrés fonctionnels analogiques et
radiofréquences. Le développement des blocs a pour but de répondre au cahier des charges
établi au niveau du système global. Cette spécification de haut niveau ne concerne pas notre

Chapitre II
- 2 -
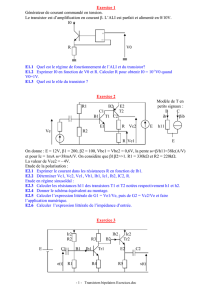
propos. Le flot peut alors se décomposer de la manière décrite à la figure suivante :
Netlist
Simulations électriques
Dessin du circuit
Simulations post-dessin
Fabrication
Test du circuit
Technologie
Modèles RF
NON
NON
OK
OK
Figure II. 1 : Flot classique de conception de circuit
Relevons l’importance des modèles utilisés tout au long du flot de conception. De leur
précision et de leur robustesse dépend le bon fonctionnement du circuit final. A chaque
branchement conditionnel du flot, le concepteur s’assure qu’il respecte les spécifications
établies au niveau système. Voyons maintenant plus précisément les présupposés, les
avantages ainsi que les limites de cette approche.
II.1.1.2. Critique de l’approche RF classique
La description des circuits, lors de la première étape du flot de conception, utilise des
éléments distribués avec un modèle précis pour chacun de ses composants (actifs et passifs).
Les interconnexions sont des lignes idéales. Cela sous-entend que les courants et les tensions
sont parfaitement définis en tout point du circuit. Cette hypothèse est largement valable dans
l’approximation des régimes quasi-stationnaires où les dimensions du circuit sont grandes
devant la longueur d’onde [POZAR05]. Pratiquement, un rapport de 20 entre ces deux
longueurs garantit ces conditions. Le déphasage observé entre deux points du circuit est alors
suffisamment faible pour que la description par éléments distribués soit licite.
L’intérêt de cette approximation réside dans la simplicité des équations qui en

Une méthode de conception spécifique pour le VCO
- 3 -
découlent. En effet, les fameuses lois de Kirchhoff, la loi d’ohm ainsi que les concepts
d’impédance peuvent s’appliquer. Il existe ensuite des techniques d’optimisation puissantes et
efficaces, dont certaines seront rappelées au II.2.1. La compréhension même du circuit est
plus intuitive, l’influence des multiples paramètres de conception est la plus naturelle.
On notera également l’importance des modèles tout au long de la conception. Dans le
cadre de notre travail, nous avions à disposition une technologie développée, optimisée et
modélisée avant tout pour le numérique. Les modèles d’actifs fournis n’étaient pas validés
pour des fréquences de fonctionnement au-delà de 20GHz. Les modèles de passifs
(inductances, capacités variables) n’existent pas.
L’inconvénient majeur de cette méthode est intimement lié à sa clef de voûte :
l’approximation des régimes quasi-stationnaires. Dans les gammes de fréquence de la bande
V (de 50 à 75 GHz), la longueur d’onde dans le silicium est de l’ordre de quelques
centimètres. Le comportement électrique ne peut plus se décrire par les lois citées
précédemment. Il faut nécessairement utiliser les lois de l’électromagnétisme pour pouvoir
prédire et optimiser la conception. Une description plus fine ouvre également le champ à des
astuces de circuiterie que notre approche classique ignore intrinsèquement.
II.1.2. Le flot millimétrique
II.1.2.1. Notions de base en millimétrique
Nous nous attachons ici à résumer les notions fondamentales bien connues dans le
monde des concepteurs de circuit en micro-onde. Commençons tout d’abord par mettre en
évidence la nécessité de revenir à une description électromagnétique des circuits. Nous avons
décrit au paragraphe II.1.1 le flot de conception en considérant qu’en tout point du circuit, le
courant et la tension étaient connus précisément. En d’autres termes, on a représenté le
courant comme un flux de particules chargées qui se conserve dans le réseau
d’interconnexions. L’analogie classique (mais simpliste) avec la mécanique compare ce flux
au débit d’un cours d’eau, les tensions seraient les différences d’altitude entre deux points de
la rivière.
En électronique, la difficulté réside dans le fait que les particules potentiellement
déplacées sont chargées électriquement. Elles induisent donc un champ électrique par leur
présence et un champ magnétique par leur déplacement. Ce flux de particules se décrit donc
avant tout comme une onde électromagnétique se propageant à travers une ligne de
transmission. Ce caractère ondulatoire s’observe plus facilement à hautes fréquences. Pour

Chapitre II
- 4 -
s’en persuader, on introduit la notion de longueur d’onde qui dépend de la géométrie du
conducteur, du milieu de propagation et surtout de la fréquence du signal électrique. Dans
l’air, 0=c/f, avec c la vitesse de propagation de la lumière. À 60GHz, on a donc 0=5mm. Ce
qui signifie que la phase de l’onde effectue une rotation complète de 360° tous les 5mm. Pour
des lignes de transmission sur silicium de constante diélectrique r=11.9, la longueur d’onde
devient Si=0/r soit Si=1.5mm. Le déphasage ne peut plus être négligé à travers les
interconnexions du circuit intégré.
Pour cette raison, on introduit des caractérisations électromagnétiques (EM) du circuit
pour mieux rendre compte des phénomènes de propagation. Encore une fois, la nécessité de
posséder des modèles fiables s’impose naturellement. Les outils d’analyses EM fournissent
les solutions aux équations de Maxwell qu’il s’agit d’exploiter pour la conception de circuits.
Pour cela, la notion de courant et de tension est étendue afin de pouvoir rendre compte de leur
nature ondulatoire dans les circuits électriques.
L’outil incontournable est la matrice de répartition ou matrice de paramètres S. Pour
comprendre son intérêt, il est utile de rappeler la modélisation des lignes de transmission par
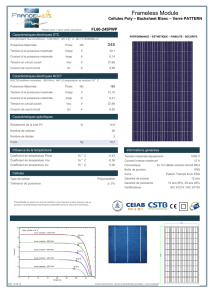
éléments distribués qui conduisent aux équations du télégraphiste. On modélise les lignes
comme une mise en série d’éléments discrets de longueur dx suffisamment petite devant 0
pour que l’on puisse considérer que les lois de Kirchhoff s’appliquent sur ces éléments. La
figure II.3 rappelle ce fameux modèle. L’inductance linéique Ldx et la résistance linéique Rdx
représentent les pertes séries dues aux conducteurs. La capacité linéique Cdx et la
conductance linéique Gdx représentent les pertes parallèles dans les diélectriques. Le système
d’équations qui en découle est connu comme les équations du télégraphiste. Les solutions
mettent en évidence l’existence d’une onde incidente et d’une onde réfléchie. De plus, il est
intéressant, lors de la résolution, d’introduire la notion d’impédance caractéristique Zc
rappelée à la figure II.3. Ce formalisme présente l’intérêt de faire le lien entre les équations
électromagnétiques et l’électronique classique : la propagation des courant et tension le long
des lignes de transmission s’assimile à celle d’une onde dont les caractéristiques ont une
signification macroscopique. Celles-ci peuvent être extraites à partir des équations de
Maxwell plus ou moins simplement en fonction du mode de propagation considéré.

Une méthode de conception spécifique pour le VCO
- 5 -
jCG
jLR
I
V
I
V
Z
eIeIxI
eVeVxV
jCGjLRj
r
r
i
i
c
x
r
x
i
x
r
x
i
)(
)(
)()(
Figure II. 2 : Equations du télégraphiste et ses solutions
La constante remarquable , qui a été mise en évidence lors de la résolution, comporte
une composante réelle pour les pertes diélectriques et une composante imaginaire i qui
traduit le comportement ondulatoire. Dès lors que des phénomènes de propagation
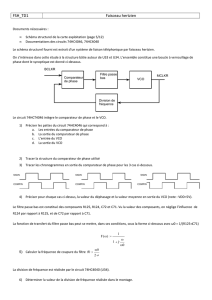
apparaissent, il faut considérer également les notions de charge, de réflexion et de
transmission qui en découlent. Prenons une ligne définie comme précédemment, d’impédance
caractéristique Zc, alimentée par un générateur de force électromotrice eg et de résistance
interne Zg et terminée par une impédance de charge complexe Zl comme représentée à la
figure II.4 :
Figure II. 3 : Ligne chargée par une impédance Zl
L’onde de courant le long de la ligne est tributaire de la charge et de la position le long
de la ligne. Pour la caractériser, on introduit le coefficient de réflexion :
Vr
Vi
ej
ZlZc
ZlZc
La dernière expression s’obtient en écrivant les conditions de continuité à la charge.
Ce coefficient de réflexion donne des informations importantes sur le type d’onde véhiculé le
long de la ligne. Par exemple, lorsque la charge est adaptée à la ligne (=0), il n’y a aucune
réflexion et tout se passe comme si la ligne était infinie. C’est la configuration idéale pour
transmettre le maximum de puissance. Les deux autres cas remarquables, lorsque la ligne est
terminée par un circuit ouvert ou un court-circuit, seront détaillés lors de la caractérisation des
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
1
/
47
100%