Détecteur de proximité ultrasonique

Ultrasons 1
Objet
à
détecter
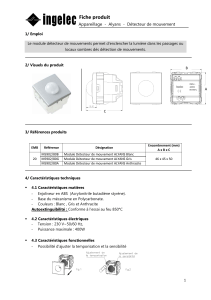
1 temps
2 temps
DÉTECTEUR DE PROXIMITÉ ULTRASONIQUE
C'est un détecteur dont le principe de fonctionnement est basé sur l'utilisation de l'ultrason. L'ultrason
ayant une fréquence inaudible par l'être humain. La portée de ce détecteur peut aller jusqu'à 6 mètres. Il
peut donc dans certaines applications, remplacer avantageusement le détecteur de proximité inductif ou
capacitif.
COMPOSITION
GÉNÉRATION DES ULTRASONS.
La génération des ultrasons est basée sur l'utilisation de l'effet piézo-électrique. C'est la propriété qu'ont
certains matériaux de vibrer à une fréquence donnée lorsqu'ils sont soumis à une certaine tension, et
inversement. Dans ces détecteurs, un élément piézo-électrique est soumis à une tension de 200 ou 300
volts. En réaction, celui-ci se met à vibrer à une fréquence d'environ 200 KHertz.
Cette vibration est transmise à l'air ambiant par une face avant blanche caractéristique des détecteurs à
ultrason. C'est une fine paroi composée de petites bulles de verre creuses, de quelques microns de
diamètre, assemblées par colle époxy (verre - rigidité, air - légèreté,). L'élément piézo-électrique et cette
plaque de céramique sont maintenus ensemble au moyen d'une membrane de caoutchouc.
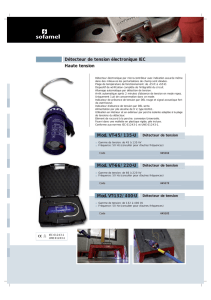
Objet
Réglage
du signal Etage
de sortie
Potentiomètre
de réglage
Cellule de
détection

Ultrasons 2
Par le chemin inverse, la membrane se met à vibrer sous l’effet de l'onde reçue. Par l’élément piézo-
électrique, cette vibration génère une petite tension traitée par l'unité d'évaluation du signal.
La membrane sert donc à l'émission et à la réception de l'onde.
REMARQUE
Ces détecteurs peuvent avoir deux fonctions:
A) détection de présence ou de non présence d'objets ( tout-ou-rien ).
B) évaluation de la distance séparant l'objet du détecteur ( système analogique souvent 4 – 20 mA ).
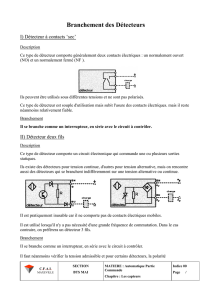
En effet, connaissant la vitesse de propagation du son dans l’air, on peut en déduire que si l’écho met un
temps égal à 2 t pour revenir, il a mis un temps t pour atteindre l'obstacle. A partir de ces données, il est
aisé de déterminer la distance de l’objet à détecter.
FONCTIONNEMENT.
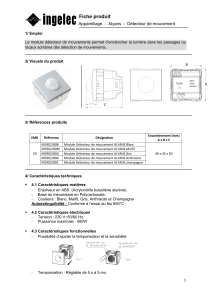
Un train d'ondes ultrasoniques est envoyé toutes les 20 milli-secondes. Dès qu'il est envoyé, l'appareil se
place en mode récepteur attendant un éventuel écho. Si après un certain temps, aucun écho n'est revenu,
l'appareil en conclu qu'aucun obstacle ne se trouve dans son champ de travail. Le temps pendant lequel
l'appareil est en mode réception détermine la portée du détecteur. Plus ce temps sera long, et plus les
échos des obstacles éloignés auront de chance de revenir avant l'envoi de l'onde suivante. Un
potentiomètre permet de régler la portée du détecteur. Ces variations ont pour effet de modifier le temps
pendant lequel le détecteur se trouve en mode de réception.
PRÉSENTATION.
Système d'émetteur récepteur séparés:
Ce système à l'avantage de permettre une fréquence de travail élevée. Pas de période d’attente pour la
réception du signal émis. La détection s'effectue par coupure de l'onde émise.
Système de proximité:
Il n'y a réflexion qu'en présence d'un objet.
Détecteur à ultrasons digitale analogique:
Ces détecteurs ont une portée de 4000 ou 6000 mm et une sortie sur 8 bits. Ceci va permettre de
déterminer la distance à laquelle se trouve l'objet et de traiter numériquement l’information.
Impulsion
d'émission
Echo
Impulsion
d'émission
Temps
20 mS
Récepteur ouvert

Ultrasons 3
CHOIX D'UN DÉTECTEUR ULTRASONIQUE.
L'objet à détecter :
Sa surface.
L'onde émise devrait arriver sur une surface parfaitement plane pour obtenir une détection parfaite. On
peut admettre une déviation d'angles de 3°. Dans le cas de détection d'amas, la pente de celui-ci ne peut
dépasser 45°.
La matière.
Blois, pierre, liquide, papier, verre, métaux, tissus,...
Attention : la détection de matériau absorbant le son doit s'effectuer à faible portée et si possible à éviter.
Exemple : feutre, ouate.
L'ambiance de détection :
La poussière.
N'aura aucune influence sur ce type de détecteur.
Le déplacement d'air.
Le son se propage par onde utilisant l'air comme support. Un courant d'air viendra simplement balayer
votre onde qui n'arrivera jamais au récepteur.
La température.
La détection d'un objet dégageant une forte chaleur va poser des problèmes car l'air chaud monte.
Courant d'air.
Détection sous vide.
Pas d'air, pas de support de propagation pour l'onde, pas de fonctionnement.
Environnement bruyant.
Le détecteur ne réagit qu'aux signaux de fréquence identique à la sienne mais il arrive parfois que
l'harmonique d'un bruit ait cette même fréquence de vibration.
Exemple : injonction d'air comprimé, un détecteur ultrasonique se trouvant dans la même pièce à peu de
chance de fonctionner correctement.
Zone morte :
Cette zone de quelques dizaines de mm à partir de la face active, détermine l'espace dans lequel aucune
détection d'obstacle ne peut s'effectuer. Cette caractéristique s'explique facilement : à partir du moment
où l'onde est émise et où l'appareil se met en mode récepteur, il doit s'écouler un certain temps
permettant ainsi à la membrane, qui était en oscillation, de revenir à l'état de repos. Cette période est
celle où l'écho d'un obstacle aurait déjà pu revenir.
1
/
3
100%