1 Analyse du systeme (20 min, 5 points)

Epreuve orale de contrôle Dossier guide 2
Page 1 sur 4
CHARIOT DE GOLF ELECTRIQUE
Comment éviter le basculement du chariot lors du démarrage en toute situation ?
1 ANALYSE DU SYSTEME (20 min, 5 points)
Prendre connaissance de la page 1 du dossier technique « chariot de golf ».
1.1 ANALYSE FONCTIONNELLE ET STRUCTURELLE
La page 2 du dossier technique présente la structure fonctionnelle globale du système étudié sous forme de
schéma-bloc.
Question 1 : Définir le type des énergies aux points à .
1.2 PROBLEMATIQUE
Le relief varié des terrains de golf présente des pentes pouvant facilement atteindre 10 %. Pour éviter la dété-
rioration du matériel lors d’une chute, le chariot, support du sac, doit être stable en toute situation tant à
l’arrêt que lors des déplacements.
On remarque tout de même que si le chariot est stable à l’arrêt dans différentes pentes, celui-ci peut basculer
vers l’arrière lorsque l’on commande sa mise en mouvement, pour des inclinaisons du sol dépassant cer-
taines valeurs.
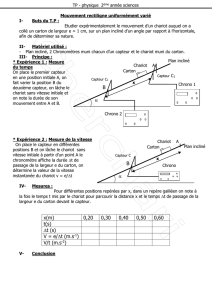
Sur la figure ci-contre, le
chariot est à l’arrêt dans
différentes pentes, où le
poids P représente
l’action de la pesanteur.
Les points A et B sont
les points de contact des
roues avec le sol. Les
roues arrières ne peuvent
ni tourner ni glisser.
Pour chaque cas, on
précise si le chariot bascule ou non.
Question 2 :
En observant ces différents schémas, énoncer quelle condition, concernant la direction de la résul-
tante, autorise le chariot à basculer ou non. A la limite du basculement, quel est l’effort de contact en A ?
Lors du démarrage, on
considère qu’une force
d’inertie Fa (due et pro-
portionnelle à
l’accélération) s’oppose
au déplacement. Cette
action vient s’ajouter au
poids P. La conjugaison
de ces deux actions
donne une résultante
appelée R.
Question 3 : A partir de
la condition énoncée
précédemment, préciser pour les quatre cas si le chariot bascule ou non ?
Avant de proposer une évolution du système pour remédier au problème constaté, il est nécessaire de carac-
tériser le comportement du chariot lors du démarrage pour déterminer la pente maximale actuellement ad-
missible durant cette phase de fonctionnement.

Epreuve orale de contrôle Dossier guide 2
Page 2 sur 4
2 COMPORTEMENT DU SYSTEME (45 min, 7 points)
L’objet de cette étude est de déterminer l’accélération actuelle du chariot à partir de mesures électriques
afin de l’exploiter dans une simulation qui permettra de définir la pente maximum admissible au démarrage.
2.1 ACCELERATION DU CHARIOT DURANT LE DEMARRAGE
On suppose tout d’abord qu’un ordre
de grandeur de l’accélération du cha-
riot au démarrage peut-être approché
de façon expérimentale. Il suffit pour
cela de mesurer, à deux instants diffé-
rents, la tension moyenne Umoy aux bornes du moteur. Les résultats relevés sont les suivants :
Remarque : ce tableau pourra être complété pour synthétiser les différents résultats obtenus dans les ques-
tions suivantes.
La batterie utilisée sur le chariot a une tension nominale de 12V.
Question 4 : A partir du principe de la modulation de largeur d’impulsion, page 3 du dossier technique
(2.4.1), déterminer les deux valeurs du rapport cyclique α1 et α2 correspondant aux deux valeurs suivantes
de la tension moyenne : Umoy1 = 3,6 V et Umoy2 = 10,8 V.
Après avoir analysé le schéma de commande du moteur à courant continu, page 4 du dossier technique (2.4.3
et 2.4.4).
Question 5 : Compléter le tableau à partir des éléments
suivants :
- Transistor (passant ou bloqué) ;
- UMot (12V ou 0V).
Question 6 : Après avoir analysé l’algorigramme du sous programme « rampe » proposé page 5 du dossier
technique, préciser la variable qui dans cet algorigramme permet de contrôler le rapport cyclique. Indiquer,
pour α1 et α2 déterminés précédemment, les valeurs correspondantes à cette variable.
Question 7 : Représenter, pour les deux cas précédents, l’allure des chronogrammes de la tension de com-
mande VCOM..
Au point de fonctionnement nous intéressant, on sait que I = 5,6 A, R = 0,22 Ω, et k = 0,027 V.rad-1.s.
Question 8 : A l’aide des formules fournies dans le dossier technique, page 3, pour le moteur à cou-
rant continu (2.4.2), déterminer pour les deux valeurs α1 et α2 calculées précédemment, les fréquences de
rotation de l’arbre moteur (on les notera
m1 et
m2).
Le schéma page 2 du dossier technique présente les caractéristiques des composants de la transmission du
chariot. On considère, lors du démarrage, que le chariot à une trajectoire rectiligne ; les roues motrices tour-
nent donc à la même fréquence de rotation.
Question 9 : Afin d’évaluer l’accélération du chariot dans la phase de démarrage :
- Calculer la fréquence de rotation des roues arrières motrices lors de chacune des mesures (on
les notera
roue1 et
roue2) ;
- Déterminer la vitesse du chariot par rapport au sol Vc1 au mo-
ment de la première mesure puis Vc2 au moment de la seconde ;
- En déduire l’accélération du chariot par rapport au sol.
2.2 PENTE MAXIMALE ADMISSIBLE LORS DU DEMARRAGE
Grâce à une simulation numérique, il est possible d’observer l’évolution des
efforts de contact roue-sol.
Mesure M1
Mesure M2
A l’instant
t1= 0,3s
t2= 0,9s
Tension moyenne moteur
Umoy1= 3,6 V
Umoy2= 10,8 V
…
…
…
Vcom
Etat du transistor
UMot
0V
5V

Epreuve orale de contrôle Dossier guide 2
Page 3 sur 4
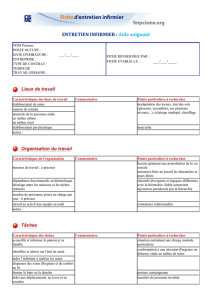
Les résultats suivants montrent plus particulièrement l’évolution de l’effort de contact de la roue avant (au
point A) du chariot (en N) lorsque l’on applique l’accélération déterminée au préalable. Dans ces simula-
tions, le démarrage commence à l’instant t=0,5 s et sa durée d’accélération est de 1 s.
Chaque courbe est calculée pour une pente différente.
Question 10 : Au regard de ces courbes, donner la valeur maximale de la pente admissible pour laquelle le
chariot ne basculera pas lors du démarrage.
3 EVOLUTION DU SYSTEME (55 min, 8 points)
L’étude du comportement du chariot permet de considérer qu’au delà d’une pente correspondant à une
inclinaison du sol
e1=2,5°, le chariot bascule lors du démarrage si on lui impose l’accélération préalable-
ment déterminée.
Pour éviter ce basculement, il est envisagé d’adapter l’accélération en fonction de la pente. Pour ce faire, il
faut disposer de l’inclinaison du chariot. Cette information sera fournie à l’unité de traitement par un incli-
nomètre monté sur le châssis du chariot.
L’inclinomètre est un capteur qui délivre une tension continue fonction de son inclinaison par
rapport à la verticale. Ces caractéristiques sont présentées ci-dessous :
pente 0%
0
20
40
60
80
100
120
140
0 1 2
pente 3%
0
20
40
60
80
100
120
140
0 1 2
pente 4%
0
20
40
60
80
100
120
140
0 1 2
pente 5%
0
20
40
60
80
100
120
140
0 1 2
temps (s)
effort de contact A (N)
temps (s)
effort de contact A (N)
temps (s)
effort de contact A (N)
temps (s)
effort de contact A (N)

Epreuve orale de contrôle Dossier guide 2
Page 4 sur 4
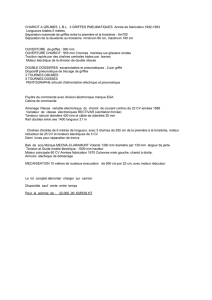
3.1 MISE EN PLACE DE L’INCLINOMETRE
On souhaite positionner ce capteur sur le montant vertical du châssis. La figure
ci-contre montre la zone de positionnement.
Question 11 : En se référant aux caractéristiques dimensionnelles du capteur
et au dessin partiel du montant (DR1), proposer un montage du capteur sur le
montant du chariot en élaborant un dessin à main levée de la solution. Veiller
à bien respecter l’orientation du capteur pour détecter l’inclinaison du chariot.
3.2 ADAPTATION DE L’UNITE DE CONTROLE
Afin d’adapter la partie commande à l’ajout de ce capteur, on propose l’organisation fonctionnelle suivante :
Question 12 : À partir de la documentation constructeur de
l’inclinomètre, indiquer, pour la pente maximale avant bascu-
lement du chariot, la tension notée Ve1 fourni par le capteur
inclinomètre. En déduire, en tenant compte de la caractéris-
tique de transfert Vs = f(Ve) représentée ci-contre, la valeur de
la tension Vs pour les deux cas suivants :
- quand l’angle de la pente est inférieur à la valeur limite e1 ;
- quand l’angle de la pente est supérieur à la valeur limite e1.
On souhaite modifier l’algorigramme du sous programme « rampe », page 5 du dossier technique, pour tenir
compte des changements structurels apportés. On se propose donc de diminuer de moitié l’accélération du
chariot au démarrage, afin d’éviter un basculement du chariot lorsque la pente du terrain dépasse la valeur
limite.
Question 13 : Pour répondre à cette contrainte, indiquer quel est le paramètre à modifier dans cet algori-
gramme. Déterminer une nouvelle valeur de ce paramètre sachant que l’accélération doit être diminuée de
moitié. Proposer une modification de l’algorigramme afin de prendre en compte le changement
d’accélération en fonction de ces deux valeurs.
Note : la sortie de la fonction « détecter un seuil » représentée par la tension Vs est reliée au bit A1 du mi-
crocontrôleur. Si Vs = 12 V alors A1 = 1, si Vs = 0 V alors A1 = 0 .
Détecter un
seuil
Circuit de mise en forme
Convertir
un angle en
tension
Inclinomètre
Gérer la
commande
du moteur
Microcontrôleur
θe
Ve
Vs
VCOM
Ve
Vs
12V
0
5V
12V
Zone de posi-
tionnement du
capteur
1
/
4
100%