MACHINE D`IMPRESSION EN RELIEF

769757323
Christophe Jaunay Page 0 16/04/2017
MACHINE D’IMPRESSION EN RELIEF
A. Support
Dossier technique d’une machine d’impression en relief
B. Capacités attendues
Rédiger le programme
On donne :
On attend :
Le cahier des charges
La nomenclature des :
Capteurs
Pré actionneurs
Actionneurs
De coder le programme dans un language structuré
De documenter ce programme pour en faciliter la lecture
De vérifier ce programme et sa conformité au cahier des charges
Choisir les capteur, récepteur et convertisseur
On donne :
On attend :
Les caractéristiques spécifiques imposées par le
cahier des charges sur les plans fonctionnel et
d’exploitation
De rédiger un bon de commande comportant la
désignation commerciale du matériel
C. Contenus d’enseignement
La chaîne de commande des moteurs :
Différents principes et choix des matériels :
Appareillage de variation de vitesse.
Le traitement de l'information :
Équipements programmables industriels (API ) ;
Langages de programmation utilisés dans les automates programmables ;
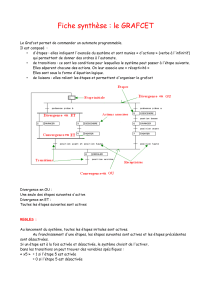
Outils de description de fonctionnement normalisés du type : Grafcet
D. Documentation pédagogique
Moteurs à entrefer plan
capteurs optiques de position
E. Documentation technique
Servomoteur disque AXEM à courant continu
Servoamplificateur pour moteurs à courant continu
F. Conditions de réalisation
temps imparti : 6 heures
situation : travail en binôme avec remise d’un compte-rendu en fin de séance

Christophe Jaunay 16/04/2017
769757323
6
ÉTUDE DU FONCTIONNEMENT DE L’AUTOMATISME
Les grafcets serviront de point de départ à l’écriture du programme exécuté par l’automate.
Mesure de la hauteur des boites
Un codeur incrémental (cf figure 2) situé en sortie du réducteur, associé au compteur de l’automate, convertit la
cote h en un mot binaire. Ce dernier sera mémorisé par l’automate à une étape du grafcet de gestion du bâti 1.
Pupitre de commande
Un interrupteur SCH assure la mise sous tension du circuit de chauffage de l’outil du bâti 2 par contacteur
KMCH. la régulation de température est assurée par un système électronique à Triac (hors-sujet).
Si la température est suffisante pour l’impression (capteur S), on autorise la mise sous tension du moteur de
translation des boîtes (un commutateur à 2 positions permet la sélection de la petite ou de la grande vitesse).
Bâti 1
Dés que le palpeur SP1 entre en contact avec la boîte, la cote h mesurée par codeur incrémental et compteur n
bits est mémorisée par l’automate.
Simultanément l’alimentation du moteur est inversée et le rapport cyclique ajusté de manière à obtenir un
ralentissement puis la remontée du palpeur. La masse de l’outil est telle, qu’elle détermine un dépassement h
constant.
Bâti 2
Le dépassement h est le même sur les deux bâtis. Le microprocesseur calcule une cote h’=(h-h)+x La
température de l’outil et la cote x déterminent la profondeur d’impression.
L’impression s’effectue en fin du dépassement h, sa profondeur réelle peut varier légèrement et dépend de la
précision de mesure de la cote h par le codeur incrémental.
Sur les deux bâtis, des capteurs de ralentissement SR1, SR2 donnent un ordre de réduction de la vitesse avant
les butées sur les positions hautes SH1, SH2.
Les taquets TQ1 et TQ2 sont actionnés par 2
vérins pneumatiques V1, V2 simple effet, pilotés
par distributeurs électro-pneumatiques EV1, EV2.
Au repos, les taquets sont en position haute
Conditions initiales :
Au premier cycle : outils en positions hautes, température de l’outil suffisante pour l’impression, tapis tournant en
petite ou en grande vitesse.
1. Identification
Sur le tableau ci-après, préciser les organes qui seront identifiés à des « réceptivités » sur le Grafcet et ceux qui
seront identifiés à des « actions ».

769757323
Christophe Jaunay Page 16/04/2017
7
Désignation
Description
SP1
SPB1
SR1
SH1
(Bâti 1)
palpeur
capteur présence boîte
capteur ralentissement montée
capteur fin de course haut
EV1
MRD1
MRM1
MRMPV1
INC compteur
RAZ compteur
(Bâti 1)
distributeur TQ1
descente palpeur
montée palpeur
montée lente palpeur
Incrémentation du compteur
Remise à zéro du compteur
S
SPB2
SR2
SH2
Compteur = h’
(Bâti 2)
température suffisante pour
impression
capteur présence boîte
capteur ralentissement montée
capteur fin de course haut
Côte h’ atteinte
EV2
MRD2
MRM2
MRMPV2
DEC compteur
(Bâti 2)
distributeur TQ2
descente outil d’impression
montée outil d’impression
montée lente outil d’impression
Décrémentation du compteur
DCY
départ cycle de production
ACY
arrêt cycle de production
kmtpv
contact avance Tapis Petite Vitesse
kmtgv
contact avance Tapis Grande
Vitesse
2. Choix de l’automate
A partir de la documentation technique de l’automate
TSX Micro du catalogue « Contrôle Industriel,
Schneider »,
Définir les caractéristiques de l’automate et le
nombre nécessaire d’entrées/sorties.
Compléter la fiche de configuration du TSX
Micro (cf document-réponse).
3. Grafcets
Décrire le fonctionnement par trois grafcets de niveau « partie commande » :
l’un gérant l’avance des boîtes EV1, EV2 et les autorisations de travail des bâtis. (grafcet maître)
les autres gérant le travail des bâtis 1 et 2 : montée, descente, mémorisation cote h. (grafcets esclaves)
4. Validation expérimentale
Ces grafcets sont à valider au moyen des logiciels AUTOMGEM et d’IRIS (simulation des entrées/sorties de
l’automate).
Programmer ces GRAFCETS de niveau « partie commande » au moyen d’AUTOMGEM.
Faire valider le bon fonctionnement des grafcets.
Simuler les entrées sorties au moyen du logiciel IRIS un utilisant :
1 écran de simulation du coffret de commande,
1 écran de simulation des préactionneurs.
1 écran de simulation des capteurs,
caractéristique
alimentation automate
nombre
entrées T.O.R.
sorties T.O.R.
entrée analogique
sortie analogique
entrées rapides

769757323
Christophe Jaunay Page 16/04/2017
8
ETUDE DE LA MOTORISATION
5. Choix du moteur
Choisir dans le tableau « caractéristiques générales des servomoteurs AXEM » un moteur à courant continu à
aimant permanent respectant les contraintes mécaniques. Il est conseillé de calculer :
la vitesse maximale de rotation du moteur
le couple utile à fournir par moteur.
6. Choix du variateur de vitesse
A partir des documents fournis, choisir le variateur de vitesse de vitesse qui peut être utilisé pour le moteur choisi
en justifiant et en énonçant clairement vos critères.
7. Schéma
Rédiger le schéma du circuit de puissance :
en représentant :
le réseau triphasé 400V,
l’alimentation du circuit de commande en 24V alternatif,
le système d’avance à rouleaux commandé par un moteur asynchrone à 2 vitesses de type DAHLANDER
à 1 seul sens de rotation (cf. MEMOTECH 12.1.8.14),
l’ensemble convertisseur/moteur à aimants permanents pour un bâti,
toutes les protections nécessaires avec leurs calibres
en respectant la nomenclature :
Information
Description
KMHL
contacteur ligne / variateur de vitesse
KMTGV, KMTGV’
contacteur moteur translation grande vitesse
KMTPV
contacteur moteur translation petite vitesse
Remarque : le variateur sera représenté sous la forme d’un rectangle comportant le numéro des bornes utilisées.
8. Choix du codeur
L’amplitude maximale du mouvement est de 0,50 mètre et on désire une précision meilleure que 2,5 millimètres.
Diamètre du tambour 0,10 mètre.
Donner, en la justifiant, la référence du codeur incrémental G61M----
nombre de points du codeur

769757323
Christophe Jaunay Page 16/04/2017
9
DOCUMENT REPONSE
 6
7
8
9
6
7
8
9
1
/
9
100%