TP1 - Analyse Fonctionnelle et Schématisation du Pilote TP32
publicité

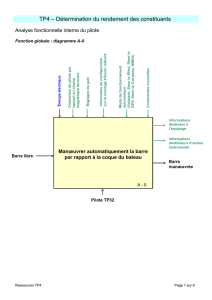
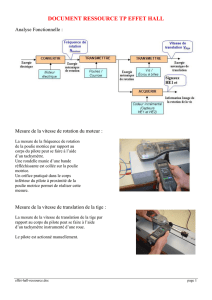
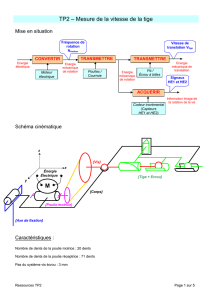
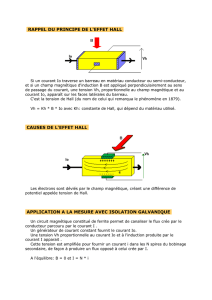
DOSSIER RESSOURCE DU PILOTE AUTOMATIQUE TP32 Mise en situation…………………………………………... Page 1 Analyse fonctionnelle externe……………………………. Page 2 Cahier des charges fonctionnel………………………….. Page 4 Système réel et Maquette virtuelle………………………. Page 5 Analyse fonctionnelle interne…………………………….. Page 6 Caractéristiques techniques……………………………… Page 8 Documentation Microcontrôleur………………………….. Page 9 Procédures de mesures…………………………………... Page10 Documentation sur le capteur à effet Hall………………. Page 13 Données moteur Page 16 Dessin d’ensemble du pilote Fin du dossier Schéma électrique Fin du dossier Ressources DT TP32 Page 1 sur 16 Documentation technique du Pilote TP32 Mise en situation Le pilote automatique est utilisé sur les voiliers pour : - ne pas être occupé à manœuvrer la barre pendant toute la durée de la navigation soulager le barreur fatigué par la concentration que demande le maintien d’un cap précis avoir les mains libres lors des manœuvres à équipage réduit Le pilote est fixé en deux points au bateau (cockpit et barre). Un compas mesure le cap du bateau. Tant que le bateau est sur la route souhaitée par l’équipage, la barre reste en position. Si le bateau quitte sa route, le pilote actionne sa tige en liaison avec sa barre, et ramène le bateau sur son cap. Rentrée de la tige (bâbord) Sortie de la tige (tribord) Touche Set/auto (Mode manuel/automatique) Notice simplifié du pilote Alimentation sous 12V continu 5 touches seulement permettent de faire fonctionner l’appareil. Une fois sous tension le pilote se met en mode « manuel » et en mode compas, le voyant de compas clignote. En mode manuel le pilote TP32 n’assure pas le maintien au cap voulu. Il est possible de déplacer la tige, à droite ou à gauche, en actionnant les touches de commande. Le passage en mode « automatique » s’effectue en appuyant sur la touche Set/Auto, le voyant de compas reste allumé. Le pilote TP32 assure le maintien du cap qui était suivi au moment du passage en mode automatique. Ressources DT TP32 Page 2 sur 16 Analyse fonctionnelle externe Enoncé du besoin : Le barreur et les équipiers PILOTE TP32 La barre Manœuvrer la barre en fonction du mode de navigation présélectionné Validation du besoin : Pourquoi le produit existe-t-il (cause, origine,…) ? Parce que barrer un bateau est contraignant (fatigue, mains occupées,…) Pourquoi ce besoin existe-t-il (finalité, but,…) ? Pour donner plus de liberté à l’équipage … Qu’est ce qui pourrait faire évoluer le produit ? D’autres systèmes de guidage du bateau qu’une barre franche (barre à roue,…) D’autres types d’actionneurs de la barre franche (suppression du vérin) D’autres systèmes de navigation en mer D’autres sources d’énergie Evolution des solutions technologiques utilisées, en réponse à des problèmes rencontrés … Qu’est ce qui pourrait faire disparaître le produit ? Autre mode de pilotage des voiliers Disparition des bateaux a voile … Ressources DT TP32 Page 3 sur 16 Graphe des interactions Mer Air FC 5 FC 6 Terre FC 4 Équipage FC 3 FC 2 FC 7 PILOTE TP32 FC 8 FC 9 FC 1 FC 10 Coque du bateau Batterie et dispositif de charge FP 1 Barre Instruments de navigation FP1 : Manœuvrer automatiquement la barre par rapport à la coque du bateau FC1 : Se fixer et se démonter sur la coque FC2 : Communiquer avec l’équipage FC3 : Etre esthétique FC4 : Etre silencieux FC5 : Résister à l’eau de mer FC6 : Résister à l’air ambiant FC7 : Détecter sa position par rapport au champ magnétique terrestre FC8 : S’adapter à l’énergie disponible à bord FC9 : Se fixer et se démonter sur la barre FC10 : Communiquer avec d’autres instruments de navigation Ressources DT TP32 Page 4 sur 16 Caractérisation des fonctions de service : Classes Flexibilités F0 F1 F2 F3 Fonctions de services nulle faible moyenne forte Niveaux impératif peu négociable négociable très négociable Critères d’appréciation Niveaux d’appréciation Flexibilité Poussée sur la barre Jusqu’à 850 N F1 Course 250 mm F1 Temps pour effectuer la course à vide Temps pour effectuer la course à 20 kg Temps pour effectuer la course à 40 kg Temps pour effectuer la course à 50 kg Temps pour effectuer la course à 85 kg Au plus 4 s Au plus 4,7 s Au plus 6 s Au plus 8 s Au plus 12 s F1 F1 F1 F1 F1 Débattement angulaire de la barre de –16° à +16° F1 Type de liaison Type de montage Réglages et configurations Démontable Bâbord ou Tribord 5 boutons (NAV, TACKS, BABORD, TRIBORD, STBY AUTO) 4 voyants (NAV, BABORD, TRIBORD, STBY AUTO) F0 F0 F0 Commande manuelle +/- 1 degré (appui bref) +/- 10 degré (appui long) F0 F0 FC3 Formes et couleurs Agréables F3 FC4 Nombre de décibels Au plus 40 décibels F2 FC5 Hauteur d’eau Projections d’eau de mer F0 FC6 Matériaux Inoxydable Résistant aux ultraviolets F0 F0 FC7 Orientation du pilote par rapport au champ magnétique terrestre +/- 1 degré F0 FC8 Tension Intensité en mode Stand By Intensité typique en mode automatique 12 V continu (entre 10 V et 16 V) 0,06 A 0,5 A F0 F0 F0 FC9 Type de liaison Type de montage Démontable Bâbord ou Tribord F0 F0 FC10 Protocole de communication Protocole NMEA F0 FP1 FC1 Visualisation des informations FC2 Ressources DT TP32 F0 Page 5 sur 16 Mise en situation coque du bateau corps du vérin barre du bateau axe bâti Maquette virtuelle tige du vérin barre du bateau corps du vérin axe coque du bateau safran Ressources DT TP32 Page 6 sur 16 Analyse fonctionnelle interne Mode de fonctionnement automatique : (Autotack, Steer to Wind, Steer to Information de configuration : GPS, Steer Compass, NMEA) sur le montage tribord /tobâbord Fonction globale Orientation : diagramme A-0 par du pilote rapport au champ magnétique terrestre Commandes manuelles Énergie électrique Réglages du gain Informations destinées à l’équipage Barre libre Manœuvrer automatiquement la barre par rapport à la coque du bateau Informations destinées à d’autres instruments Barre manœuvrée A-0 Pilote TP32 Ressources DT TP32 Page 7 sur 16 Diagramme A0 : Énergie électrique Orientation du pilote par rapport au champ magnétique terrestre Réglages du gain Information de configuration sur le montage tribord / bâbord Mode de fonctionnement automatique: (Autotack, Steer to Wind, Steer to GPS, Steer to Compass, NMEA) Commandes manuelles ACQUERIR Capteur à effet Hall Compas Fluxgate+ CAN Informations TRAITER Informations de navigation Mesure 2 Capteurs à effet Hall Informations destinées à d’autres instruments Interface NMEA + bus CAN Ordre Mdrive A ou Mdrive B (Sortie ou Rentrée de tige) Déplacement de la vis Mesure 1 DISTRIBUER CONVERTIR énergie électrique Câble + Régulateur + Protections COMMUNIQUER Microcontrôleur énergie électrique ALIMENTER Informations destinées à l’équipage Amplificateur de puissance Moteur CC TRANSMETTRE énergie mécanique de rotation Réducteur + Vis / écrou énergie mécanique de translation POUSSER ou TIRER la barre Barre libre Tige Ressources DT TP32 Page 8 sur 16 Pilote TP32 Barre manœuvrée A0 Description partielle de la chaîne d’énergie du pilote automatique Transmettre Convertir m U Moteur électrique I convertir Cm r Réducteur poulie courroie r kr Vtige Système visécrou + tige Cr ve kve Poulie + fil d’acier Ftige avec : rendement ; k : rapport Caractéristiques techniques: Réducteur poulie courroie Nombre de dents de la poulie motrice : Zpm = 20 dents Diamètre primitif de la poulie motrice : dpm = 12,6 mm Nombre de dents de la poulie réceptrice : Zpr = 71 dents Diamètre primitif de la poulie réceptrice : dpr = 44,73 mm Système vis-écrou Pas du système vis écrou : pas = 3 mm Ressources DT TP32 Vmasse Page 9 sur 16 p = 1 kp Fmasse Documentation microcontrôleur (Informations provenant du site Mitsubishi Electronics) Mitsubishi's 8-Bit CAN Microcontrollers Target Low-End Automotive Applications The 7600 series of 8-bit controller-area-network (CAN) microcontrollers from Mitsubishi Electronics target various automotive application, including body-control systems (e.g., door, seat, mirror, sunroof, lighting controls, keyless entry systems) as well as airbag control systems. The M37630 CAN processor is built using a high-performance silicon-gate CMOS process technology. It is powered by Mitsubishi's 7600 Series CPU core, which features a minimum instruction-execution time of 0.2 µs. The device contains one channel that complies with the CAN 2B specification, 16 KB of ROM, 512 bytes of RAM, and 36 programmable I/O ports with overload protection. It operates at a maximum frequency of 10 MHz at 5 V and consumes 55 mW at the highest operating speed. The device is available in a 44-pin QFP package. The M37630 also features: Three 8-bit and two 16-bit timers with pulse width modulation (PWM) capability UART (1 channel) and clock synchronous serial I/O (1 channel) AD converter (8-bit x 8 channels) Watchdog timer Key-on wake-up function Reduced EMI emissions Wide temperature range (-40°C to +85°C) Price and Availability The mask ROM version of the M37630 8-bit CAN microcontroller is $6 each in 10,000-unit quantities. Ressources DT TP32 Page 10 sur 16 Schéma électrique du pilote automatique TP32 Voir document A3 Dessins techniques du pilote automatique TP32 Voir document A3. Mesures sur le système Mesures aux bornes du moteur : La platine de mesure permet de relever le signal ou la tension aux bornes du moteur. Il est possible d’utiliser un multimètre ou un oscilloscope comme sur la photo ci contre. Mesure du courant consommé par le moteur : Pour mesurer le courant consommé par le moteur, utiliser une pince ampéremètrique sur la boucle sortie du système comme sur la photo ci contre. Mesure de la vitesse de translation de la tige : La mesure de la vitesse de translation de la tige par rapport au corps du pilote peut se faire à l’aide d’un tachymètre instrumenté d’une roue. Le pilote est actionné manuellement. Lire la notice d’utilisation du tachymètre. Ressources DT TP32 Page 11 sur 16 Mesure de la vitesse de rotation du moteur : La mesure de la fréquence de rotation de la poulie motrice par rapport au corps du pilote peut se faire à l’aide d’un tachymètre. Une rondelle munie d’une bande réfléchissante est collée sur la poulie motrice. Un orifice pratiqué dans le corps inférieur du pilote à proximité de la poulie motrice permet de réaliser cette mesure. Lire la notice d’utilisation du tachymètre. Mesure de la vitesse de rotation de la poulie réceptrice (ou vis) : Connecter un oscilloscope à mémoire entre les bornes verte et noire pour enregistrer le signal HE1 ou HE2 délivré par l’un des deux capteurs. Lire la procédure de réglage de l’oscilloscope. Signaux des capteurs : La platine permet aussi d’avoir accès au signal délivré par les deux capteurs à effet hall intégrés dans le pilote. La poulie réceptrice liée à la vis est équipée de deux aimants. Les deux aimants décrivent donc une trajectoire circulaire lorsque la poulie réceptrice tourne. Les deux capteurs à effet hall sont situés à proximité de cette trajectoire et diamétralement opposés. Dispositif de détection Aimants diamétralement opposés Capteurs à effet hall Ressources DT TP32 Page 12 sur 16 Ressources DT TP32 Page 13 sur 16 Evolution du signal délivré par les capteurs : Les deux aimants sont représentés en rouge et vert sur la poulie réceptrice. Les lettres N et S sur les aimants matérialisent les pôles magnétiques Nord et Sud. Les deux aimants sont montés dans le sens inverse l'un de l'autre. On constate que le passage d'un pôle Nord à proximité d'un capteur met sa sortie à 1, tandis que le passage d'un pôle Sud la met à 0. Représentation de l’évolution du signal logique délivré par les capteurs pour un tour de la poulie réceptrice. 1 Ressources DT TP32 2 3 4 5 6 Page 14 sur 16 Ressources DT TP32 Page 15 sur 16 Le capteur à effet Hall. E.H. Hall découvrit en 1879, pour la première fois, à l'Université Johns Hopkins, l'effet qui porte son nom. Un champ magnétique appliqué à un conducteur parcouru par un courant provoque l'apparition d'une tension transversale au conducteur. Cet effet est dû au déplacement des électrons d'un côté ou de l'autre suivant le sens des lignes de champ magnétiques. La différence de potentiel qui apparaît entre les deux faces est appelée tension de Hall. Le rapport V.e / LH est appelé coefficient de Hall ( V est la tension de Hall, e l'épaisseur du matériau, I l'intensité du courant électrique et H le champ magnétique). Donc pour un matériau donné, parcouru par un courant I constant, la tension de Hall V est proportionnelle au champ magnétique H. De même, si le champ H est constant alors V est proportionnelle au courant I. Les applications de l'effet Hall. Les premières applications de l'effet Hall furent donc les gaussmètres (mesure des champs magnétiques) et les wattmètres. La production en série de circuits intégrés à effet Hall a permis d’éliminer les problèmes inhérents à la fabrication de composants discrets (coûts élevés, sensibilité aux bruits et aux variations de température). Les circuits intégrés à effet Hall sont simples à mettre en oeuvre, bon marché, peu sensibles aux bruits et stables en températures. L'intégration d'amplificateurs dans le même circuit permet l'obtention de signaux de sortie aux niveaux électriques facilement utilisables. Les commutateurs à effet Hall verrouillés. Ces circuits à effet Hall (type UGN 3175) sont stables en température et résistants sur le plan mécanique. Chaque circuit contient un régulateur de tension, un circuit de compensation en température, un amplificateur de signal, un trigger de Schmitt et une sortie sur un transistor à collecteur ouvert. Le régulateur intégré permet une tension d'alimentation Vcc comprise entre 4,5 et 24 volts. L'interrupteur de sortie (transistor NPN) peut absorber un courant maximal de 15 mA. Avec une résistance reliée à une tension d'alimentation de +5 volts, cela rend le dispositif totalement compatible avec les niveaux TTL. La grande sensibilité de ce capteur permet de l'utiliser avec de petits aimants bon marché placés à des distances assez élevées du capteur. Le modèle UGN 3175 est en outre sensible à des champs magnétiques bidirectionnels. La sortie bascule donc aussi bien devant un pôle Nord que devant un pôle Sud. Ressources DT TP32 Page 16 sur 16 Ressources DT TP32 Page 17 sur 16 Ressources DT TP32 Page 18 sur 16 Données Moteur Tensio Consta Résista n nte de nce d'alime FEM d'induit ntation KE V v/rad/s 16 1 0,0221 Cf0 Nm 5,43E03 Coefficient de frottement visqueux a Nm/tr/min 3,79E-07 Essai a vide : U (V) 1,01 2 3 4,02 5,03 6,02 7,03 8,05 9,01 10 11 I (mA) 255 255 265 273 280 290 295 303 310 320 323 Ressources DT TP32 N (tr/min) 320 749 1179 1604 2037 2455 2887 3327 3742 4174 4622 KE 0,0221 Couple de pertes (Nm) 0,00564 0,00564 0,00586 0,00603 0,00619 0,00641 0,00652 0,00670 0,00685 0,00707 0,00714 Page 19 sur 16