les reseaux industriels - E

1
LES RESEAUX INDUSTRIELS
Architecture d ’un ensemble industriel
Généralités
Types de réseaux industriels
L'architecture d'un ensemble industriel permet de distinguer trois familles de réseaux suivant leur position
dans la hiérarchie.
– Réseaux généralistes : réseaux locaux (Ethernet, Token Ring, etc.) et distants (Internet, X25, Frame
Relay, ATM, etc.)
– Les réseaux industriels d'interconnexion, destinés à connecter des installations (ateliers ou cellules
de production entre elles et avec les réseaux généralistes). On distingue des réseaux à haut débit (MAP,
Factor, etc.) et bas débit (LAC, etc.).
– Les réseaux de terrain, destinés à relier des machines et appareils entre eux (automates, CN, robots,
contrôleurs de process, etc.), on distingue trois niveaux dans la hiérarchie, les réseaux d'automates, les
réseaux de capteurs, et les bus destinés à interconnecter des composants ou des cartes électroniques.
Bus de terrain
BUS : conducteur(s) commun(s) à plusieurs circuits permettant l’échange de données
RÉSEAU : ensemble de lignes de communication qui desservent une même unité géographique
TERRAIN :zone limité géographiquement (usine véhicule…)
Système de communication numérique entre plusieurs dispositifs, ou entre un dispositif et ses périphériques
(mémoire, capteurs, actionneurs…)
BUT : remplacement des boucles analogiques
Décentralisation du contrôle
Interopérabilité
Intelligence déporté
Diminution des coûts
Augmentation de l’efficacité et de la qualité
Avantages
Réduction des coûts d’installation Performances accrues
Moins de câblage Communications numériques
Réduction du temps d’installation Données disponibles partout
Moins de matériel nécessaire Accès direct entre deux équipements
Structure distribuée
Interopérabilité importante grâce à la
Réduction des coûts de maintenance standardisation
Complexité moindre Modélisation du réseau :
Maintenance plus aisée Topologie physique ↔ vue logique
Outils de test dédiés standardisation matérielle et logicielle
Flexibilité d’extension
Inconvénients
Développer les connaissances
-- Compatibilité pas assurée entre fournisseurs – Accès au bus
– Topologie du réseau, longueur, débit – Gestion des erreurs
-- Investissement en équipement – Support physique
Choix entre technologies propriétaires ou standards

2
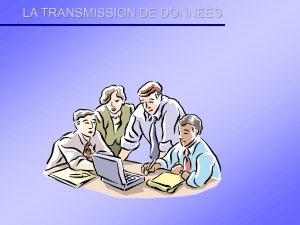
Émetteur
Capteur
Alim. de
l’émetteur
Récepteur
Historique
Boucle de courant 4-20 mA
Boucle analogique
Pas complètement normalisée
Normalisation des bus de terrain
1960 boucle analogique
1970 processeur : contrôle centralisé
1980 contrôle distribué, capteurs intelligents
1992 : définition de la couche physique
1994 WorldFIP (World Factory Information Protocol Europe) et
ISP(Interoperable System Project, E.-U.) fusionnent : FF (Fieldbus
Foundation)
1998 : couches liaison, application : non abouti Apparition de solutions
propriétaires devenues standards de fait (Interbus, ASI, Lonworks)
IEC : International Electrotechnic
Commission
ISA : Instrument Society of America
OSI : Open System Interconnection
ISO : International Standardization
Organization
.
Cohabitation standards de fait et standards internationaux Compatibilité Choix ?
Bus de terrain = bus de communication industriels
Classement selon complexité décroissante
• Bus d’usine : réseau local industriel ethernet MAP Manufacturing Automation Protocol) ouTOP (Technical
andOffice Protocol)
• Bus de terrain (Fieldbus)
• Bus bas niveau (capteur/actionneur)
Bus de terrain
– Trame : 10 octets à 256 octets
– Temps de réaction : 1 ms à 10 ms
– Coopération de tous les nœuds
(maître/esclave ou multimaîtres)
– Accès au niveau inférieur
(capteur/actionneur)
Bus capteur/actionneur
– Nœuds à intelligence limité ou nulle
– Temps de réaction primordial
– Nombre de données limité
ISP
FF
ISA
IEC
Comité Fieldbus
IEC/ISA SP50
WorldFIP
Profibus - ISP
(dissident)

3
• Couches OSI
Système de communication dédié Respect du modèleOSI
Les réseaux d ’automates
Concepts
But Les réseaux d'automates sont destinés à permettre la communication entre des automates
programmables qui eux-mêmes pilotent les chaînes de production.
Les données en provenance des capteurs et actionneurs doivent pouvoir transiter entre les
automates, ainsi que des données de configuration/contrôle et les programmes des automates.
Protocoles, trames et débits
les quantités de données à transmettre sont faibles (trames de quelques octets à 256 octets), le débit
est en rapport, il n'y a pas de communication entre réseaux.
Standards
Chaque fabricant d'automates utilise un ou plusieurs standards propriétaire, seul MODBUS est
utilisé depuis longtemps par de nombreux fabricants, il est petit-à-petit remplacé par des protocoles
plus modernes : INTERBUS, PROFIBUS, etc.
• Caractéristiques principales de MODBUS
– C ’est le plus ancien des réseaux d'automates non propriétaire, créé initialement par GOULD
devenu APRIL. Il est utilisé par de nombreux fabricants.
– Il accepte plusieurs médiums physiques à faible débit : RS232, RS422, RS485 (entre 50 et 19200
Bauds), boucle de courant (4800 Bauds), liaison radio
– La transmission au format asynchrone 8 bits.
• Sous-couche LLC
– reconnaît deux modes
• mode ASCII
• mode RTU (Remote Terminal Unit), ou mode binaire
• Sous-couche MAC
– Fonctionnement en maître-esclave avec maître fixe
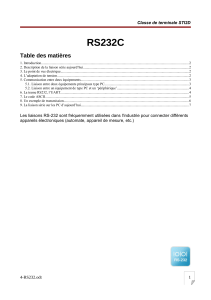
Principe du protocole MODBUS
Le protocole MODBUS (marque déposée par MODICON) est un protocole de dialogue basé sur une
structure hiérarchisée entre un maître et plusieurs
esclaves. Le protocole MODBUS ne définit que la
structure des messages et leur mode d’échange. On peut
utiliser n’importe quel support de transmission RS 232,
RS 422 ou RS 485, mais la liaison RS 485 est la plus
répandue car elle autorise le « multipoints ».
Deux types de dialogues sont alors possibles :
- le maître parle à un esclave et attend sa réponse,
- le maître parle à l'ensemble des esclaves, sans attente de réponse
Couche hautes 5-7 :
Chargées du traitement des données
(présentation,cryptage…)
Couche basses 1-4 :
Chargées du transport des données (codage,
représentation des données…)

4
Echange maître vers 1 esclave :
Le maître interroge un esclave de numéro unique sur le réseau et attend de la part de cet esclave une réponse.
Echange Maître vers tous les esclaves :
Le maître diffuse un message à tous les esclaves présents sur le réseau, ceux-ci exécutent l’ordre du message
sans émettre une réponse.
Ces deux types de dialogues imposent les conditions suivantes :
- Il ne peut y avoir sur la ligne qu'un seul équipement en train d'émettre.
- Aucun esclave ne peut envoyer un message sans une demande préalable du maître.
- Le dialogue entre les esclaves est impossible.
• Format de la trame :
Le message échangé entre le maître et les esclaves est constitué de la façon suivante :
• La détection de fin de message est réalisée sur un silence de plus de 2 caractères.
• Le maître et l'esclave utilisent le même type de message.
• Codage de la trame :
• Deux types de codage peuvent être utilisés pour communiquer sur un réseau Modbus. Tous les
équipements présents sur le réseau doivent être configurés selon le même type.
• Type ASCII : chaque octet composant une trame est codé avec 2 caractères ASCII (2 fois 8 bits).
• LRC : C’est la somme en hexadécimal modulo 256 du contenu de la trame hors délimiteurs, complémentée
à 2 et transmise en ASCII.
LRC : C’est la somme en hexadécimal modulo 256 du contenu de la trame hors délimiteurs, complémentée à
2 et transmise en ASCII.
Type RTU (Unité terminale distante) : chaque octet composant une trame est codé sur 2 caractères
hexadécimaux (2 fois 4 bits).
La taille maximale des données est de 256 octets.
- Le mode ASCII permet d’avoir des intervalles de plus d’une seconde entre les différents caractères sans
que cela ne génère d’erreurs, alors que le mode RTU permet un débit plus élevé pour une même vitesse de
transmission.
- L’ensemble des informations contenues dans le message est exprimé en hexadécimal.
- Le maître s’adresse à l’esclave dont l’adresse est donnée dans le champ prévu à cet effet.
- Le code fonction indique à l’esclave le type d’action à réaliser.
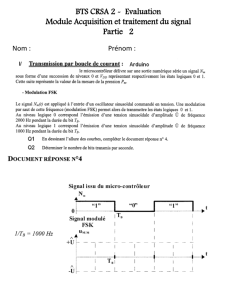
Exemple :
lecture de registre, code de fonction (03)HEX,
écriture dans un registre, code de fonction (10)HEX.

5
Exemple : sur l'esclave 8 : lecture de 16 bits d'entrée à partir de l'adresse 100h.
Exemple de communication maître/esclave
 6
7
6
7
1
/
7
100%