cours - Site de cours en électrotechnique

Page 1 sur 15
COURS N° 8 : Variation de vitesse
MAS
DÉROULEMENT DE LA SÉANCE
TITRE
ACTIVITÉS PROF
ACTIVITÉS ÉLÈVES
DURÉE
FIN DU COURS {? heures}

Page 2 sur 15
Tableau de comité de lecture
Date de lecture
Lecteurs
Observation
Remarques rédacteur
Date modifications
12 mars 2001
Première Version
12 mars 2001
Quote of my life :
Fournir ma contribution aux autres est ma philosophie.
Et la vôtre ?
Si vous avez lu ce T.P. et que vous avez des remarques à faire, n'hésiter pas et écrivez-moi à l'adresse suivante :
Ce dossier contient :
Un dossier élève (pages 4 à -)
Un dossier prof (pages - à -)
Un transparent (page - à -)
E-Mail :
crochet_david@hotmail.com
L'objet du message doit contenir le mot
CARIM
Adresse Professionnel :
CROCHET David
Professeur de Génie électrique
Lycée Technique
02500 HIRSON
(Adresse valable jusqu'au 30 juin 2001)

Page 3 sur 15
COURS N° 8
Variation de vitesse MAS
Niveau : T STI GET
Lieu : Salle de cours
Durée : ? heures
Organisation : Classe entière
LIAISON AU RÉFÉRENTIEL
PRÉ-REQUIS
Les élèves doivent être capables :
-
OBJECTIFS
Les élèves devront être capables de :
-
NIVEAU D'APPRENTISSAGE
MÉTHODE
- Passive

Page 4 sur 15
S.T.I. - G.E.T.
B 2 – ÉLECTROTECHNIQUE
COURS
N° 8
LES VARIATEURS
DOSSIER PÉDAGOGIQUE
V
Va
ar
ri
ia
at
te
eu
ur
r
d
de
e
v
vi
it
te
es
ss
se
e
M
MA
AS
S
Objectif :
Documents :
Secteur : Salle de cours Durée : ? heures

Page 5 sur 15
Variateur de vitesse pour MAS
1. Rappel de physique
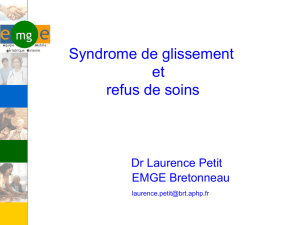
1.1. Schéma équivalent
Le moteur asynchrone, peut se traduire par ce circuit électrique équivalent :
Contrairement au moteur à courant continu, rien le lie les caractéristiques
électriques aux caractéristiques mécaniques. Donc, il faut trouver un autre schéma ou
systèmes d'équations qui lie les paramètres électromécaniques.
1.2. Expression de la vitesse
Partons de cette équation :
pg1f
N'
.
Pour faire varier la vitesse du moteur de façon continue, on peut :
- Soit faire varier le glissement g
- Soit faire varier la fréquence d'alimentation f
2. Action sur le glissement
Pour accroître le glissement du moteur alimenté à fréquence constante :
- On ne peut que réduire la tension d'alimentation, si le moteur est à cage
- On peut augmenter la résistance par phase rotorique à l'aire d'un rhéostat, si le
moteur est à bagues
- On peut aussi prélever plus ou moins de puissance entre les bagues et récupérer
cette puissance
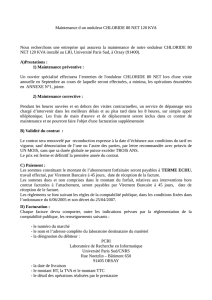
2.1. Variation de la tension d'alimentation.
La seule façon d'augmenter le glissement d'un moteur à cage alimenté par des
tensions de fréquence constante est de diminuer la valeur de ces tensions. La mise en
œuvre est très simple, il suffit de mettre en place un gradateur triphasé entre le réseau
et le moteur.
Vs
VE
LS
IS0
IS
I'R
L'R
g
R'R
RS
MAS
3~
C
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%