Poursuite et Classification Conjointes d`une Cible Mobile en

SETIT 2009
5th International Conference: Sciences of Electronic,
Technologies of Information and Telecommunications
March 22-26, 2009 – TUNISIA
- 1 -
Poursuite et Classification Conjointes d’une Cible
Mobile en Utilisant le Radar Passif GSM
Azzedine BOUARABA, Abdelaziz OULDALI,
Miloud DOUAOUI et Zahir MESSAOUDI
Ecole Militaire Polytechnique, BP 17 bordj el bahri, Algerie
takoucht21@hotmail.com
aaziz_o[email protected]
Messaoudi_zahir06@yahoo.fr
Résumé: L’exploitation des signaux d’opportunités dans les radars passifs permet de localiser une cible, mais avec des
erreurs importantes. Avec les signaux GSM, on mesure correctement l’angle d’arrivé ainsi que la vitesse doppler d’une
cible mobile. Dans ce travail, on se propose d’utiliser ces deux mesures, pour la poursuite et classification conjointes,
d’une cible susceptible d’évoluer selon plusieurs modèles de mouvement. Il s’agit du mouvement rectiligne à vitesse
constante, mouvement circulaire à vitesse angulaire constante et un mouvement rectiligne accéléré. Les algorithmes
utilisés IMM-EKF et IMM-UKF sont issus de la combinaison, des deux filtres non linéaires de Kalman et de
l’algorithme des modèles multiples interagissent. Les résultats de comparaison montrent clairement les meilleures
performances de poursuite et de classification de l’IMM-UKF devant l’IMM-EKF.
Mots clés: GSM, IMM-EKF, IMM-UKF, radar passif.
INTRODUCTION
Le radar passif, connu sous le nom de passive
coherent location est un moyen de localisation de
cibles en utilisant les ondes ambiantes telles que les
émissions radio, celles de la télévision et de la
téléphonie mobile [GRI 86][KUL 05][TAN 05]. Le
principal avantage de ce type de radar est son
indétectabilité, alors que la résolution en distance est
son principal inconvénient qui, toutefois, n’influe
nullement sur les performances de l’estimation de la
direction d’arrivée (DOA) (à titre d’exemple par
root-WSF) et de celles de la vitesse doppler (VD) (à
titre d’exemple par la fonction d’ambiguïté (FA))
d’une cible qui peut être localisée en exploitant ces
deux derniers paramètres [TAN 05][ZHE 04].
Récemment, un engouement pour les radars passifs
utilisant les signaux GSM a été constaté [TAN 05]. La
raison à cela réside d’une part dans l’abondance
actuelle des stations GSM et d’autre part dans la
nature du spectre, de ce type de signaux, généralement
lentement variable contrairement au spectre des
signaux FM.
Dans ce travail, qui est motivé par les résultats
expérimentaux de [LU 07], on se propose d’utiliser les
mesures de DOA et de VD pour la poursuite et de la
classification conjointes d’une cible susceptible
d’évoluer selon plusieurs modèles de mouvements. Il
s’agit du modèle de mouvement rectiligne à vitesse
constante, modèle de mouvement rectiligne à
accélération constante et le modèle mouvement
circulaire à vitesse de rotation constante [LI 05].
Les algorithmes de poursuite et de classification
conjointes utilisés sont l’IMM-EKF et l’IMM-UKF,
appliqués sur des observations, DOA et VD, issues
respectivement des méthodes root-WSF et la FA.
Nous signalons que le problème de poursuite de cibles
est traité dans la littérature [TOB 04][CHA 92].
Toutefois, à notre connaissance, le problème de
poursuite et de classification n’a pas été abordé dans
les radars passifs utilisant les signaux GSM.
Le présent papier est organisé comme suit. Dans le
paragraphe 1, nous rappelons brièvement le principe
du radar passif. Dans le paragraphe 2, nous analysons
les performances de la méthode root-WSF dédiée à
l’estimation de la DOA et celles de la FA dédiée pour
l’estimation de la FD. Le paragraphe 3 est consacré à
la poursuite et classification conjointes en utilisant
l’IMM-EKF et l’IMM-UKF. Les résultats de
simulation sont présentés dans le paragraphe 4.
1. Principe du radar passif
Le principe de base du radar passif est illustré dans
la figure 1 [TAN 05]:

SETIT2009
- 2 -
En effet, un réseau de capteurs forme deux lobes
l’un en direction de l’émetteur d’opportunité et l’autre
en direction de la cible mobile. Le but ultime de cette
opération est l’estimation de chaque signal
séparément, s
d
et s
e
, qui s’avère difficile à cause de la
prédominance du signal direct [SAI 03]. Dans ce type
de radar, les étapes importantes de traitement du
signal, après réception, sont comme suit [SUN 03]:
- Estimation des DOA des signaux,
- Filtrage spatial (séparation de s
d
et s
e
),
- Estimation de la FD de la cible mobile.
2. Performances de l’estimation des
paramètres de la cible
Nous allons à présent nous intéresser très
brièvement à l’estimation de la DOA de l’écho, par
root-WSF, et à l’estimation de la FD par la FA.
2.1. Modélisation du signal
Dans les radars passifs utilisant les signaux GSM,
le modèle du signal est [KUB 06] :
d d e e
Y(n)=A(
θ) s (n)+A(θ) s (n)+b(n), n=1:N
(1)
où Y(n) est le vecteur des données issues des capteurs
au nombre de M, N est le nombre de snapshots, A(θ
d
)
(respectivement A(θ
e
)) est le vecteur directionnel du
signal direct s
d
(n) (respectivement de l’écho), ce
dernier est modélisé comme suit [KUB 06]:
e d e d
s (n)=
α s (n-τ)exp( j2πf n)
(2)
où α représente l’atténuation de parcourt, τ
e
est le
retard temporel et f
d
est la FD, b(n) est un bruit blanc
gaussien centré et de matrice de covariance σ
2
1
d
. Dans
la suite de ce travail, nous allons noter le rapport des
puissances de l’écho sur celle du bruit par SNR.
2.2. Estimation de la DOA de l’écho
Dans les radars passifs, la puissance du signal
direct est très supérieure à celle de l’écho dans un
rapport ISR (rapport interférence sur signal) situé
entre 70 et 100 dB [SAI 03]. Aussi, dans de telles
situations les méthodes classiques d’estimation
conjointe de DOA de s
d
et celle de s
e
s’avèrent
inefficaces [KUB 06]. Toutefois, les méthodes
polynomiales, qui ne tiennent compte que de la DOA
du signal indépendamment de son amplitude, donnent
des résultats appréciables. Par ailleurs, il faut aussi
tenir compte de la corrélation entre s
d
et
s
e
. Pour le cas
du signal GSM, de modulation GMSK, la corrélation
entre ces deux signaux diminue rapidement avec la
différence de marche entre eux. Néanmoins, un lissage
spatial est à prévoir si on utilise la méthode de
root-MUSIC.
Dans ce travail, nous avons utilisé la méthode
polynomiale root-WSF [STO 90], qui donne des
résultats satisfaisants même dans les situations de forte
cohérence entre les deux signaux. Pour illustrer les
performances de root-WSF, nous considérons les
paramètres suivants, valables dans toute la suite de ce
travail : θ
d
= 15°, θ
e
= 30°, N = 200, ISR = 80 dB et
enfin le SNR = 0 dB. La figure 2 présente les résultats
relatifs à l’estimation de la DOA de l’écho
uniquement. Nous remarquons, pour chaque cas
(M=4, 8 et 16), que la racine carrée de l’erreur
quadratique moyenne (RMSE) de l’estimation tend à
s’approcher de la borne de Cramer-Rao (BCR).
Dans le cas de la présence de plusieurs cibles en
même temps, on peut combiner l’algorithme
root-WSF avec le principe du monopulse pour la
recherche et l’association des DOA [GU 02], ce qui
permet aussi de réduire la complexité de calcul.
2.3. Estimation de la fréquence Doppler
La FA définie par [GRI 05] :
T*
de d e
0
A (
τ,f)= s (t)s (t+τ) exp(- j2πf t)dt
∫
(3)
est très souvent utilisée pour l’estimation du retard
temporel et de la FD via deux signaux (en
l’occurrence s
d
et s
e
) à partir de l’abscisse du
maximum de |A
de
(τ,f)|. La FD est nécessaire pour
l’obtention de la vitesse doppler (VD) de la cible
(f
d
=VD/longueur d’onde) alors que le retard temporel
est nécessaire pour la localisation en distance
(τ
e
= distance/célérité). Cependant, ce dernier n’est pas
efficace dans la localisation des cibles dans les radars
passifs utilisant les signaux GSM à cause de sa
mauvaise résolution en distance [TAN 05]. Par
conséquent, dans ce travail l’estimation du retard
temporel ne sera pas abordée et la FA est calculée pour
τ = 0 [KUB 06].
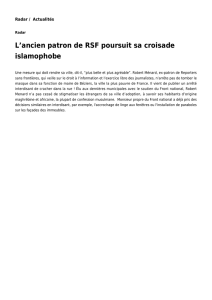
La figure 3 illustre le résultat de l’application de la
FA sur un signal GSM 900 MHz et l’écho d’une cible
se déplaçant à une VD = 50 m/s correspondant à
f
d
= 150 Hz (M = 8, N = 200, ISR = 80dB et
SNR = 0 dB). Ainsi, nous pouvons nous apercevoir de
la présence d’un pic en la fréquence f
0
≈ 150 Hz.
Figure 1.
Principe de base du radar passif
Réseau de capteurs
Émetteur
d’opportunité
Cible mobile
s
d
s
e
RMSE (dB)
SNR (dB)
Figure 2. RMSE d’estimation de la DOA cible

SETIT2009
- 3 -
La figure 4 présente les performances de la FA,
utilisée pour l’estimation de la FD, en fonction du
nombre de capteurs. Il apparaît clairement que
la RMSE de l’estimation, pour chaque cas (M = 4, 8 et
16), tend à s’approcher de la BCR correspondante.
3. Poursuite et classification conjointes de
cibles mobiles
Le radar passif GSM mesure la DOA
et la VD (ou
FD) d’une cible en mouvement. Ces paramètres sont
reliés à la position (x, y) et à la vitesse sur (x, y) de la
cible par les fonctions non linéaires suivantes [LI 05]:
r
e
r
y-y
θ= atan( )
x-x
(4)
t t
r r
d
2 2 2 2
r r t t
(x - x ) x + (y - y ) y
(x-x )x+(y-y )y
V= +
(x -x ) +(y-y ) (x-x ) +(y- y )
& &
& &
(5)
Où (x
r
,y
r
) et (x
t
,y
t
) sont respectivement les
coordonnées du radar passif (réseau de capteurs) et de
l’émetteur d’opportunité (station de base GSM).
3.1. Modélisation d’état
Soit X
k
le vecteur suivant à l’instant k :
k
abscisse x
vitesse sur x x
accéleration sur x x
X = =
ordonnée y
vitesse sur y y
accéleration sur y y
&
&&
&
&&
(6)
Ce vecteur est à l’origine de l’introduction d’un
modèle d’état non linéaire qui décrit l’évolution d’une
cible mobile suivant un modèle j [LI 05] :
j j
k+1 k
k
X =F X +G v
(7)
e
k k
k
d
Z = = h(X ) + w
θ
V
(8)
où F
j
(respectivement G
j
) est la matrice de transition
(respectivement de contrôle) du j
ème
modèle du
mouvement de la cible, Z
k
est le vecteur de mesures
(DOA et VD), h(
•
) est la fonction non linéaire donnée
dans les équations (4) et (5), v
k
est le bruit du modèle.
w
k
est le bruit des mesures caractérisée par des
variances de l’estimation de la DOA, respectivement
la VD (FD à un facteur près). Ces dernières peuvent
être tirées, respectivement à partir des figures 2 et 4,
pour des paramètres SNR et M donnés.
3.2. Mouvement de la cible
Les modèles de mouvement de la cible, au nombre
de trois, utilisés dans ce travail sont les plus souvent
suggérés dans la littérature [LI 05][CHA 92]. Chaque
modèle
j
est caractérisé par F
j
et G
j
, comme suit
[LI 05]:
3.2.1.
Mouvement rectiligne à vitesse constante
(
M1
)
1 1 1 1
F =diag{F,F} et G =diag{V ,V }
(9)
où
2
1
1 T
T /2
F= , V =
0 1 T
.
3.2.2. Mouvement circulaire à vitesse constante
(
M2
)
2
1 sin(ωT)/ω0 0 -cs(T) 0
0 cos(ωT) 0 -sin(ωT)
0 0 0
F = cs(T) 1 sin(ωT)/ω
sin(ωT) 0 cos(ωT)
0 0 0 0 0 0
M M
M
(10)
où
2 1
cs(T) = (1-cos(
ωT)) ωet G = G
.
3.2.3. Mouvement rectiligne accéléré
(
M3
)
3 3 3 3
F =diag{ , } et G =diag{V ,V }
F F
(11)
où
2 2
3
1 T T /2 T /2
= 0 1 T , V = T
0 0 1 1
.
F
T est la période d’observation de la cible et
ω
sa
vitesse de rotation, supposée connue [LI 05].
Les algorithmes IMM-EKF et IMM-UKF
combinent les deux filtres non linéaires de Kalman
EKF et UKF (utilisés pour l’estimation de l’état) et
l’algorithme IMM. Ce dernier est le plus souvent
utilisé, dans la littérature [LI 05][BLO 88], pour la
classification du mouvement d’une cible évoluant
selon plusieurs types de modèles de mouvement.
Les étapes des deux algorithmes IMM-EKF et
IMM-UKF sont résumées comme suit [BLO 88]:
Amplitude
normalisée
Fréquence (Hz)
Figure 3. Fonction d’ambigüité du signal GSM
SNR (dB)
Figure 4.
RMSE d’estimation de la FD
RMSE (dB)

SETIT2009
- 4 -
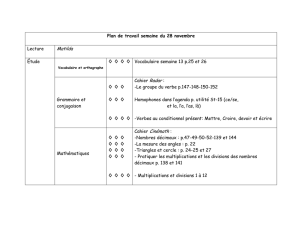
4. Simulation et résultats
La trajectoire simulée de la cible, figure 6, est
composée de trois modèles : M1, M2 et M3 de durée
80 s chacun. Les conditions initiales de la cible sont
[500 m, 20 ms
-1
, 0 ms
-2
, 4000 m, -15 ms
-1
, 0 ms
-2
]. La
matrice de covariance sur l’état est égale à
Q = diag{0.1; 0.1 ; 0.1}² ms
-2
et la période T = 1 s.
Les figures 7 et 8 montrent, respectivement, les
mesures de DOA et VD de la cible mobile, estimées
respectivement, par root-WSF et la FA. Nous avons
pris : M = 8, N = 200 et SNR = 0 dB, ce qui nous
permet d’avoir les variances,
σ
θ
= 0.5° et
σ
Vd
= 0.2 ms
-1
, à partir des figures 2 et 4.
Les probabilités de transition, d’un modèle de
mouvement à un autre, sont fixées a priori comme suit
[LI 05]:
ij
.98 .01 .01
p .01 .98 .01
.01 .01 .98
=
(12)
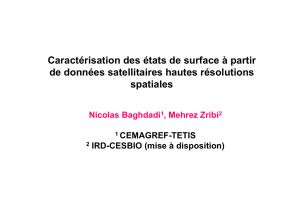
L’analyse des performances des algorithmes
IMM-EKF et IMM-UKF, à travers 100 réalisations
indépendantes Monte Carlo, montre que l’IMM-UKF
permet une meilleure poursuite et classification des
modèles de mouvements, comparé à l’IMM-EKF. Ceci
est illustré d’abord par les figures 9 et 10, qui
montrent les probabilités des modèles de mouvement.
Sur ces deux figures, On voit clairement la
différence, entre les deux algorithmes, dans la
deuxième phase du mouvement M2, où l’IMM-EKF le
confond avec le mouvement M3, tandis que
Récepteur
Emette
ur
Ordonnées ( K m )
Abscisses (
K
m)
Figure
6.
Trajectoires,
générée et estimées
, de cible
Initialisation
des probabilités des modèles (µ
j
), états
estimés (x
j
) et matrices de covariance des états (
P
j
).
1. Mixage des:
- probabilites des modèles : µ
j/i
(k) i, j=1 : 3
- états estimés : x
j
(k-1/ k-1)
- covariances des états :
P
j
(k-1/ k-1)
2. Filtrage EKF ou UKF (
mesures DOA et VD)
:
- prédiction : x
j
(k/ k-1), P
j
(k/ k-1)
- estimation :
x
j
(k/ k), P
j
(k/ k)
- rapport de vraisemblance :
Λ
j
(k)
3. Mise à jour des :
-
probabilités des modèles :
µ
j
(k)
4. Estimation combinée des:
- états:
X
(k)
- covariances des états :
P
(k)
Retour à (a) pour les prochaines mesures (
DOA et VD)
.
Figure 5
.
Étapes de l’IMM-EKF et de l’IMM-UKF
DOA ( ° )
Temps (s)
Figure
7.
Mesures de DOA de la cible mobile
Vitesse doppler (m/s)
Temps (s)
Figure
8
.
Mesures de VD de la cible mobile
Figure
9
.
Probabiltés de
classification
par
IMM
-
EKF
Probabilité
Temps (
s)
Probabilité
Temps (s)
Figure
10
.
Probabiltés de
classification
par
IMM
-
UKF

SETIT2009
- 5 -
l’IMM-UKF permet une juste classification. On
remarque aussi que les deux algorithmes détectent les
bons instants de transition des modèles, qui coïncident
avec les instants réels fixés à priori lors de la
génération de la trajectoire du mobile.
Sachant que la résolution en distance du signal
GSM900 Mhz est de l’ordre 1.8 Km [TAN 05], la
position initiale de la cible est donc choisie
aléatoirement dans un segment 1.8 km
,
en direction de
la première mesure de DOA et autour de la position de
la cible, cette dernière est déduite à partir de
τ
e
,
calculé par la corrélation entre les signaux s
d
et s
e
.
La figure 11 montre les RMSE d’estimation en
distance, obtenues par l’IMM-EKF et l’IMM-UKF.
Initialement on remarque que les erreurs d’estimation
sont largement importantes, conséquence de
l’initialisation des filtres (EKF et UKF), qui est dû à la
mauvaise résolution en distance de signaux GSM.
L’erreur obtenue par l’IMM-UKF diminue
rapidement, à partir du mouvement circulaire M2,
pour se maintenir à moins de 100 m. Par contre
l’erreur obtenue par l’IMM-EKF diminue lentement et
permet ainsi une mauvaise poursuite de la cible.
L’analyse des RMSE d’estimation en vitesse,
représentés sur la figure 12, nous permet de voir que
les erreurs qui se stabilisent durant toute la période de
simulation. On remarque aussi la supériorité des
performances qu’offre l’IMM-UKF.
Ainsi on remarque que les performances d’un
algorithme de poursuite et de classification sont
étroitement liées au filtre de poursuite utilisé.
5. Conclusion
Dans ce travail, nous avons utilisé l’IMM-EKF et
l’IMM-UKF, pour la poursuite et la classification du
mouvement d’une cible, en mesurant seulement sa
DOA ainsi que sa VD, qui sont obtenues par
l’exploitation des signaux d’opportunités GSM. Pour
cela, une analyse des performances de root-WSF,
dédiée au calcule de la DOA et celles de la FA pour la
FD, est d’abord effectuée. Les résultats de simulation
obtenus montrent d’une part la possibilité de poursuite
et de classification du mouvement de la cible par
l’IMM-EKF et l’IMM-UKF, malgré la mauvaise
résolution en distance du signal GSM. D’autre part,
l’étude comparative montre les meilleures
performances, en termes de poursuite et de
classification des modèles de mouvement, de
l’algorithme IMM-UKF devant celles de l'IMM-EKF.
R
EMERCIEMENTS
Les auteurs tiennent à remercier Djedou Mustapha,
Benssalah Mustapha et Mesloub Amar. Ce travail est
réalisé au laboratoire des systèmes de communisation
de l’Ecole Militaire Polytechnique -Algérie.
R
EFERENCES
[BLO 88] BLOM H. and BARSHALOM Y., “The
Interacting Multiple Model Algorithm for Systems with
Markovian Switching Coefficients,” IEEE Trans. Auto.
Contr., AC-33(8):780–783, Aug. 1988.
[CHA 92] CHAN Y. and RUDNICKI S., “Bearing-only and
doppler-bearing tracking using instrumental variables,”
IEEE trans. on Aero. and Elec. Sys., Vol.28, pp 1076-
1082, Oct. 1992.
[GRI 86] GRIFFITHS H. and LONG N., “Television-based
bistatic radar,” IEE Proc. Radar, Sonar, & Navigation,
vol. 133, no.7, pp 649-657, Dece. 1986.
[GRI 05] Griffiths H. and Baker C., “Measurement and
analysis of ambiguity functions of passive radar
transmissions,” in Proc. of the IEEE Intl. Radar Conf.
2005, pp. 321–325, May 2005.
[GU 02] GU H., “Radar angle-tracking system for multiple
moving targets”, IEE Proceedings-Radar Sonar
Navigation, vol. 149. pp 23-28. 2002.
[KUB 06] KUBICA M., KUBICA V., NEYT X., RAOUT J.,
ROQUES S. and ACHEROY M., “Optimum target
detection using emitters of opportunity,” in Proc. of the
IEEE Radar Conf., (Verona, NY), Apr. 2006.
[KUL 05] KULPA K., “Continuous wave radars –
monostatic, multistatic and network,” in Advances in
Sensing with security applications, NATO Advanced
Study Institute, July 2005.
[LI 05] LI X. and JILKOV V., “Survey of Maneuvering
Target Tracking Part V: Multiple-Model Methods,” IEEE
trans. on Aero. and Elect. Syst. vol. 41, no. 4 Oct. 2005.
[LU 07] LU Y., TAN D. and SUN H., “Air target detection
and tracking using a multi-channel GSM based passive
radar,” Wavform Diversity and Design Conference
2007, Intl. vol 4. pp. 122-126. Jun. 2007.
Figure
12
.
RMSE d’estimation en vitesse
RMSE ( m/s )
Temps (s)
RMSE ( m )
Temps (s)
Figure
11
.
RMSE d’estimation en
distance
 6
6
1
/
6
100%