I. Moteurs à aimant permanent, à induction, à rotor bobiné : quelle sont
les différences ?
La vidéo explique les différents types de moteurs électriques utilisés dans
l'automobile, en insistant sur l'importance de bien les connaître pour faire un choix
éclairé lors de l'achat d'une voiture électrique.
Les bases du moteur électrique
Un moteur électrique se compose de deux parties : un stator (la cage
extérieure fixe) et un rotor (la pièce mobile).
Le courant électrique crée un champ magnétique qui fait tourner le rotor,
générant ainsi l'énergie mécanique.
Le contrôle de la vitesse et de la direction de rotation se fait en faisant varier
l'amplitude et la polarité du courant.
Les trois principaux types de moteurs
Il existe trois types principaux de moteurs électriques couramment utilisés dans
l'automobile :
1. Moteur Synchrone à Aimant Permanent
Fonctionnement : Le rotor, équipé d'aimants permanents, tourne à l'intérieur
d'un stator avec des bobines. Le courant circulant dans les bobines crée un
champ magnétique tournant qui entraîne le rotor à la même vitesse (d'où le
nom "synchrone").
Avantages : Très bon rendement et conception relativement simple
Inconvénients : Utilise des matériaux coûteux comme le néodyme et
d'autres terres rares, ce qui soulève des questions sur le coût élevé, l'impact
écologique lors de l'extraction et le recyclage.
2. Moteur Asynchrone à Induction
Fonctionnement : Il utilise un rotor en cage d'écureuil (noyau en fer
entouré de barres de cuivre non alimentées). Le champ magnétique tournant
créé par le stator induit du courant dans les barres du rotor, créant un
deuxième champ magnétique. Ces deux champs interagissent pour faire
tourner le rotor à une vitesse inférieure à celle du champ magnétique du
stator (d'où le nom "asynchrone").

Avantages : Coût moins élevé et conception très simple.
Inconvénients : Rendement moins bon et couple moins élevé à basse vitesse
que le MSAP..
3. Moteur Asynchrone à Rotor Bobiné
Fonctionnement : Il n'utilise ni aimants ni barres de cuivre, mais des
bobines sur le rotor, comme sur le stator. Les deux génèrent un champ
magnétique qui interagissent pour faire tourner le rotor. L'alimentation
électrique du rotor en rotation se fait grâce à des balais en contact
permanent.
Inconvénients : Les balais peuvent s'user et nécessiter un entretien. Ces
moteurs sont également moins efficaces et moins performants que les
moteurs synchrones ou à induction.
Un quatrième type de moteur : à Flux Axial
Ce type de moteur est principalement utilisé dans la mobilité légère et de
faible puissance
Architecture : Le stator se trouve derrière le rotor, et le champ magnétique
se trouve dans le sens de l'axe.
Avantages : Fonctionnement silencieux, compacité, légèreté et bonne
efficacité énergétique
Inconvénients : Coût de production plus élevé, couple plus faible et risques
de surchauffe à grande vitesse.
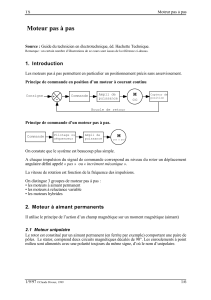
II. Moteurs pas à pas
Introduction et Principes de Base
Qu'est-ce qu'un Moteur Pas à Pas ? C'est un type de moteur électrique
qui permet un contrôle précis du mouvement . Il convertit l'énergie
électrique en mouvement mécanique en utilisant un courant continu
séquencé . la rotation peut etre continue (marche arrierre ou avant).
Avantages : Il peut contrôler la rotation par petits pas pour une haute
précision et peut maintenir une position souhaitée (contrairement à un
moteur à courant continu standard).

Applications : Ils sont essentiels dans l'automatisation et la fabrication,
notamment dans les imprimantes 3D, les machines CNC, les scanners et
les soupapes d'expansion électronique de précision.
Fonctionnement : Le moteur est commandé par un contrôleur (comme
un automate ou un Arduino) et un entraînement (drive) qui active et
désactive des commutateurs électroniques pour envoyer des impulsions
aux bobines.
Angle de Pas : Chaque impulsion fait tourner le moteur d'un cran. Un
moteur typique nécessite 200 impulsions pour une rotation complète de
360 degrés, ce qui signifie que chaque pas fait tourner l'arbre de 1,8
degré.
Structure du Moteur Pas à Pas Hybride (Le Plus Courant)
Rotor : Fixé à l'arbre, il est constitué d'un aimant permanent (aimanté
axialement) avec deux moitiés (coupelles) de polarité Nord et Sud. Il
comporte un certain nombre de dents décalées.
Stator : Il est fixe et entoure le rotor. Il se compose de bobines de fil
(souvent 8 bobines en deux groupes de 4) qui forment des électroaimants
lorsqu'elles sont alimentées. Le stator comporte également des dents pour
l'alignement magnétique.
le rotor a plus de dents que le stator (50 dents pour le rotor et 48 pour le stator).
Rotation : Les bobines du stator créent des champs électromagnétiques qui
attirent et repoussent le champ magnétique du rotor, entraînant la rotation par
pas. La polarité des bobines est inversée à chaque mise sous tension.
Autres Types de Moteurs Pas à Pas
1. Moteur à Aimant Permanent : Conception plus simple avec un rotor à
aimant permanent magnétiser diamétralement. Dans un exemple simplifié, il
tourne de 90 degrés à chaque pas.

2. Moteur à Réductance Variable : Utilise un rotor en fer doux
(ferromagnétique), non un aimant permanent. Les bobines magnétisées
attirent simplement les dents du rotor pour le faire tourner.
Méthodes de Contrôle (Mode d'Entraînement)
Différentes méthodes permettent de contrôler la rotation et la précision :
Entraînement par Onde (Wave Drive) : Une seule phase est activée à la
fois (grand angle de pas, faible couple).
Pas Complet (Full Step) : Deux phases sont activées simultanément, ce qui
positionne le rotor entre les bobines et offre un couple beaucoup plus élevé.
Demi-pas (Half Step) : Alternance entre une phase unique et deux phases.
Cela permet une rotation plus douce et un angle de pas plus petit.
Micro-étape (Micro-Step) : La méthode la plus populaire. Deux phases sont
alimentées, mais l'intensité du courant augmente lentement dans l'une et
diminue lentement dans l'autre. Cela crée une onde sinusoïdale (au lieu d'une
impulsion), offrant une rotation très douce.
III. Moteurs à induction
Le moteur à induction est l'un des dispositifs les plus importants jamais
inventés, car il convertit l'énergie électrique en énergie mécanique pour entraîner
des pompes, des ventilateurs, des compresseurs, et plus encore.
Composants et Fonctionnement
1. Le Boîtier et le Refroidissement
L'arbre se trouve à l'avant ; c'est la partie qui tourne et à laquelle on
connecte les dispositifs à entraîner.
Le ventilateur est situé à l'arrière, relié à l'arbre, et souffle de l'air sur le
boîtier pour refroidir le moteur. Le refroidissement est essentiel pour
éviter que la chaleur excessive ne fasse fondre l'isolation des bobines
internes, provoquant un court-circuit.
Les ailettes sur le côté du boîtier augmentent la surface pour améliorer la
dissipation de la chaleur.
Les roulements (à l'intérieur des boucliers avant et arrière) soutiennent
l'arbre et lui permettent de tourner en douceur.

2. Le Stator (Partie Fixe)
Le stator est la partie fixe du moteur. Il est constitué de fils de cuivre
enroulés en bobines entre des fentes.
Chaque fil de cuivre est isolé électriquement par un émail spécial.
Dans un moteur à induction triphasé, il y a trois jeux de bobines séparés qui
se connectent aux bornes électriques.
Lorsque le stator est alimenté, il génère un champ électromagnétique
tournant.
3. Le Rotor (Partie Tournante)
Le rotor est relié à l'arbre ; dans ce cas, il s'agit d'un rotor de type cage
d'écureuil.
Il est composé de deux anneaux d'extrémité reliés par des barres. Il utilise
également des tôles d'acier laminées pour concentrer le champ magnétique et
améliorer l'efficacité.
4. Principe de Base de la Rotation
Un courant électrique traversant un fil crée un champ électromagnétique
Un fil placé dans un champ magnétique et traversé par un courant subit une
force (principe des champs qui se poussent ou s'attirent)
L'utilisation d'un courant alternatif (CA) fait que le champ magnétique se
dilate, s'effondre et que sa polarité s'inverse constamment
Le champ magnétique du stator induit un courant dans les barres de la cage
d'écureuil (qui agissent comme des boucles de fil)
Pour assurer une rotation continue, un moteur triphasé utilise trois bobines
espacées de 120 degrés (une par phase), ce qui crée l'effet d'un champ
magnétique tournant qui "tire" continuellement le rotor
Les barres du rotor sont souvent inclinées pour répartir le champ magnétique
sur plusieurs barres et empêcher le moteur de se bloquer
Configurations de Connexion Électrique
Les six bornes du moteur peuvent être connectées de deux manières principales
pour compléter le circuit :
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%