6925
2836
4
59:1
55.1
.65.1
:196
2320
582:
8891
Christian GARING
Alain LHOPITAL
:211
0753
Les Mille et Une Questions en PRÉPA
ue e
t des
Micro
techn
iques
PHYSIQUE
e Mé
caniq
1re année MPSI/PTSI
ure d
3e ÉDITION
ACTUALISÉE
périe
+
Écol
e Na
tiona
le Su
Questions
ouvertes
59:1
6925
2836
4
Les Mille et Une Questions en PRÉPA
:196
.65.1
55.1
PHYSIQUE
3e ÉDITION
ACTUALISÉE
Micro
Christian GARING
ue e
t des
Professeur en classes préparatoires au lycée Thiers à Marseille
Alain LHOPITAL
e Na
tiona
le Su
périe
ure d
e Mé
caniq
Professeur en classes préparatoires au lycée Thiers à Marseille
Écol
+
Questions
ouvertes
techn
iques
:211
0753
582:
8891
2320
1re année MPSI-PTSI
6925
2836
4
59:1
55.1
.65.1
Retrouvez tous les titres de la collection
Les Mille et Une Questions en Prépa
ISBN 9782340-016651
Écol
e Na
tiona
le Su
périe
ure d
© Ellipses Édition Marketing S.A., 2019
32, rue Bargue 75740 Paris cedex 15
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
sur http://www.editions-ellipses.fr
55.1
59:1
6925
2836
4
$YDQWSURSRV
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
Ce livre conforme aux programmes de 2013 reprend une conception originale
imaginée dans l’unique but d’être utile aux élèves. Sous forme d’une batterie de
questions courtes, de conseils et d’exercices, il embrasse la totalité du programme de
physique de MPSI et PTSI.
Il doit permettre de préparer efficacement une colle, de faire le point sur ses
connaissances avant un devoir surveillé, et d’entamer sereinement les révisions de fin
d’année, qu’il s’agisse du passage de 1ère en 2ème année ou de la préparation à l’écrit
et à l’oral des concours. Mais pour éviter de travailler par à-coups, il vaut mieux en faire
un « compagnon de route », utile de façon régulière pour un travail de fond tout au long
de l’année.
Il regroupe tout ce qui est indispensable pour réussir à l’écrit et à l’oral et sera
donc utile à tous ceux qui ont à cœur de travailler la physique dans l’objectif des
concours et de leur formation personnelle.
La présentation sous cette forme est inédite ; l’ouvrage de première année MPSI
et PTSI comporte 12 chapitres, chacun regroupant de 60 à 80 questions réparties en
rubriques :
– Les ordres de grandeur utiles
– Le cours d’abord
– Conseils à suivre ; erreurs à éviter
– Applications directes du cours
– Questions de réflexion ; physique pratique
– Exercices
– Questions ouvertes
– Travaux pratiques (selon les cas)
caniq
Bien sûr chaque chapitre « questions » est suivi de son chapitre « réponses »
entièrement rédigé et reconnaissable à sa marge grisée sur le côté droit.
e Na
Écol
$YDQWSURSRV
Avant-propos
tiona
le Su
périe
ure d
e Mé
L’esprit de ces rubriques est détaillé ci-après :
3
/HVRUGUHVGHJUDQGHXUXWLOHV
8891
2320
:196
.65.1
55.1
59:1
6925
2836
4
Cette rubrique donne des valeurs utiles :
• des constantes fondamentales : à l’oral, par exemple, il est bon de connaître
la masse et la charge de l’électron, la constante de gravitation, la constante
des gaz parfaits,...
• mais aussi des grandeurs courantes (et que l’on ne peut pas ignorer) : la
pression atmosphérique en millimètres de mercure, l’indice de réfraction du
verre, la masse molaire de l’air,…
• et enfin, une foule de données dont il est bon d’avoir une idée numérique :
la vitesse du son dans l’eau, la masse de la Terre, la densité particulaire de
l’air,…
Toutes ces grandeurs ont une unité à respecter (oui, une force électromotrice
s’exprime en volts !) et, le cas échéant, à convertir en unité du système international
avant de passer à une application numérique (non, une masse volumique ne s’utilise pas
en g.cm–3).
Il est conseillé de (re)lire les tableaux au début de chaque chapitre afin de se
faire aux ordres de grandeur, dont la mémorisation vient automatiquement avec la
pratique et la réflexion.
0753
582:
/HFRXUVG·DERUG
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
La physique n’étant pas une « science contemplative », il est illusoire de croire
qu’il suffit de lire le cours pour savoir faire ! L’apprentissage du cours suppose au
contraire une implication active, stylo à la main et cahier fermé pour refaire les calculs,
les schémas, les démonstrations des théorèmes,...
Une réflexion sur les modèles et les hypothèses s’impose : la signification et la
vraisemblance des résultats doivent primer.
Sans ce travail approfondi, pas de miracle : la résolution des exercices et
problèmes est vite compromise.
Les questions de cours proposées dans ce livre se posent fréquemment telles
quelles aux écrits des concours. Elles n’ont pas vocation à se substituer au cours du
professeur, mais elles permettent de « Faire le Point » par l’auto-évaluation des
connaissances utiles pour réussir.
Elles sont courtes, précises et sans difficultés et sont regroupées par paragraphes
d’intérêt. Il ne s’agit pas d’y répondre par une « formule », mais, comme à l’oral, de
conduire un raisonnement à l’aide de phrases étayées par des démonstrations
reproduisant une partie du cours. Les résultats essentiels doivent être obligatoirement
mémorisés : ils apparaissent encadrés dans la partie « réponses ».
Les programmes de MPSI et PTSI sont très voisins ; néanmoins les parties
spécifiques à l’une ou l’autre filière sont clairement indiquées au début des questions.
le Su
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
e Na
Écol
tiona
Il faut apprendre à être réceptif aux conseils, et non essayer de « réinventer les
méthodes ». Car hélas, la 3e loi de Kepler n’est nullement appropriée dans le cas d’une
$YDQWSURSRV
59:1
6925
2836
4
force centrale quelconque, et l’omission du passage en notation complexe pour l’étude
d’un système dissipatif en régime forcé tourne vite au cauchemar trigonométrique…
Alors dissipons d’entrée tout malentendu à propos de cette rubrique : les
« conseils à suivre » sont prodigués pour aider sincèrement, pas pour contraindre
inutilement ; les « erreurs à éviter » sont signalées afin de ne pas être commises et non
pour induire en erreur.
La connaissance du cours n’est rien si elle n’est pas renforcée par des conseils
d’application. Cette rubrique est donc à lire plutôt dix fois qu’une, et surtout à faire
sienne, sans hésitation ni état d’âme…
55.1
$SSOLFDWLRQVGLUHFWHVGXFRXUV
582:
8891
2320
:196
.65.1
Tout exercice sur une partie du programme récemment abordée présente une
difficulté par sa nouveauté, tant que les bons réflexes ne sont pas installés, alors qu’il
paraîtra élémentaire quelque temps après : c’est cette phase d’apprentissage qu’il faut
surmonter sans se décourager.
Cette rubrique regroupe de petits exercices au contenu plus modeste et dont la
résolution suppose simplement l’application directe d’un résultat de cours ou d’une
technique immédiate de calcul, ce qui n’exclut pas la réflexion. En cas de difficulté, ne
pas se précipiter sur la solution, mais revoir la partie correspondante du cours.
:211
0753
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
ue e
t des
Micro
techn
iques
Cette rubrique est faite pour les curieux, ceux qui aiment comprendre le monde
qui les entoure. Elle plaira à ceux qui aiment réinvestir leurs connaissances
fondamentales dans la résolution de problèmes concrets.
Les questions inciteront le jeune scientifique à penser comme un futur ingénieur
ou chercheur : quelles applications imaginer pour un résultat ? et quelle notion
scientifique mobiliser pour comprendre un phénomène ?
Les calculs y sont limités, et il faut faire preuve de bon sens ; seules certaines
questions sont un peu plus difficiles.
([HUFLFHV
e Na
Écol
$YDQWSURSRV
tiona
le Su
périe
ure d
e Mé
caniq
Aucune intention d’être exhaustif ici. Chaque chapitre propose néanmoins une
liste d’une dizaine d’exercices variés, souvent posés à l’oral des concours ou issus de
problèmes d’écrit récents, avec pour intention de faire découvrir la diversité du sujet
traité dans le chapitre. Certains énoncés sont « classiques », de difficulté moyenne,
présentant un intérêt explicité dans le titre ; d’autres, marqués d’un astérisque (*), soit
sont plus originaux, soit nécessitent un peu plus de réflexion…
Le but n’est pas de les apprendre en espérant « tomber dessus » le jour de l’écrit
ou de l’oral, mais d’acquérir sur ces exercices les réflexes sains permettant d’en aborder
d’autres dans de bonnes conditions.
Il faut, à l’écrit comme à l’oral, être très attentif aux applications numériques qui
sont le débouché naturel d’un grand nombre d’exercices ou de problèmes de physique.
6925
2836
4
Pour cela il est très important d’apporter systématiquement, pour chaque application
numérique, un commentaire physique sur la valeur que l’on vient de calculer : ordre de
grandeur, pertinence, intérêt pour l’étude, vérification d’une hypothèse, compréhension
concrète du phénomène étudié, comparaison avec d’autres grandeurs, faisabilité d’une
mesure expérimentale…
Un exercice ou une question de problème ne doivent en aucun cas finir sur une
valeur numérique non commentée, la seule justification d’une application numérique est
ce que l’on peut en dire.
55.1
59:1
4XHVWLRQVRXYHUWHV
:211
0753
582:
8891
2320
:196
.65.1
Il s’agit-là d’une nouvelle rubrique dans cette édition !
Ces 5 « questions ouvertes » et « sans aide » par chapitre placent les étudiants devant
une situation nouvelle sans donner le mode opératoire pour en venir à bout. Il faut donc
établir soi-même la démarche intellectuelle pour résoudre le problème soumis (en
général en une seule question posée), ce qui demande une réflexion physique préalable
plus intense. Des données numériques ou autres peuvent être fournies (sans toujours être
utiles) à la fin de l’énoncé. Quelques fois des indications pour mettre sur la voie sont
disponibles en début de solution. L’absence de guidage fait-elle que ces questions, d’un
niveau de difficulté supérieur, sont réservées aux meilleurs étudiants ? Pas forcément, il
suffit quelquefois d’un peu de bon sens, de flair et de méthode ; tous pourront
néanmoins profiter de la solution détaillée, toujours abordable. Gageons qu’avec deux
années d’entraînement, ces questions apparaîtront bien moins ardues en fin de seconde
année juste avant les concours...
techn
iques
7UDYDX[SUDWLTXHV
ure d
e Mé
caniq
ue e
t des
Micro
L’ambition de cette partie reste modeste. Elle conclut un bon nombre de
chapitres, ceux qui se prêtent particulièrement aux travaux pratiques, et son but n’est
pas de proposer des séances de TP toutes faites. En revanche elle regroupe une série de
questions simples sur les dispositifs, les montages, les conditions expérimentales, les
fonctionnements d’appareils, le pourquoi de telle observation, les ordres de grandeur
classiques…
Ce sont de bons exemples de questions pouvant être abordées à la partie orale de
TP des concours, celle-ci jouant un rôle important pour départager les candidats.
Cette partie est particulièrement orientée, dans l’esprit des nouveaux
programmes, vers la mesure et l’exploitation des séries de mesures qui, avec les
incertitudes, sont au cœur de la démarche scientifique.
e Na
Écol
tiona
le Su
périe
Pour conclure nous exprimons le vœu que ce livre soit utile au plus grand
nombre, à ceux qui simplement ont à cœur de travailler la physique parce qu’elle donne
lieu à des épreuves de concours et à ceux, heureusement nombreux, qui par curiosité et
goût, ont toujours plaisir à étudier cette discipline.
Les auteurs
$YDQWSURSRV
Chapitres
6925
2836
4
6RPPDLUH
Questions
1 :Signaux harmoniques et propagation
39
59:1
Compléments mathématiques
Réponses
Questions
103
Réponses
39
63
.65.1
1 : Signaux harmoniques et propagation
55.1
Chapitres
2 : Optique géométrique
3 : Approche quantique
:196
165
2 : Optique géométrique
2320
103
4 : Régimes continu et transitoire
197
8891
3 : Approche quantique
582:
165
5 : Régime sinusoïdal forcé et filtrage
263
0753
4 : Régimes continu et transitoire
6 : Dynamique du point matériel
:211
5 : Régime sinusoïdal forcé et filtrage
63
9
197
323
127
177
127
219
177
285
219
351
285
323
407
351
449
407
471
421
9 :8Propriétés
desetsystèmes
thermodynamiques
: Oscillateurs
forces centrales
515
449
539
471
10 9: :Évolution
Propriétésd’un
des système
systèmesthermodynamique
thermodynamiques
591
515
617
539
591
675
617
693
675
725
693
747
725
747
iques
263
e Mé
caniq
ue e
t des
8 :7Oscillateurs
et forces
centrales
: Solide en rotation
autour
d’un axe fixe
Micro
6 : Dynamique du point matériel
techn
7 : Solide en rotation autour d’un axe fixe
ure d
: Évolution
d’un système
thermodynamique
11 10
: Champ
magnétique
et actions
de Laplace
le Su
périe
: Champ magnétique
et actions de Laplace
12 11
: Induction
électromagnétique
Écol
e Na
tiona
12 : Induction électromagnétique
421
ue e
t des
caniq
e Mé
ure d
périe
le Su
tiona
e Na
Écol
582:
0753
:211
iques
techn
Micro
:196
2320
8891
.65.1
55.1
59:1
6925
2836
4
6925
2836
4
&KDSLWUH
&RPSOpPHQWVPDWKpPDWLTXHV
eTXDWLRQGXVHFRQGGHJUp
59:1
$QJOHVRULHQWpVHWWULJRQRPpWULH
55.1
.65.1
:196
3URGXLWVFDODLUHHWSURGXLWYHFWRULHO
'LIIpUHQWLHOOH
&DOFXOGHSHWLWHVYDULDWLRQVHWVRPPHG·LQILQLPHQWSHWLWV
2320
6XUIDFHVHWYROXPHV
8891
$XWUHVDSSOLFDWLRQVGXFDOFXOGLIIpUHQWLHO
8QHJUDQGHXUSHWLWHQHGRLWrWUHSULVHQXOOH
0753
/HVFRXUEHVSDUDPpWUpHVHWOHVGpSKDVDJHV
:211
iques
/HVQRPEUHVFRPSOH[HV
techn
'pULYDWLRQG·XQYHFWHXUSDUUDSSRUWjXQDQJOH
&DUDFWpULVWLTXHVVLPSOHVG·XQHHOOLSVH 036, Micro
&HQWUHGHPDVVH
ue e
t des
eTXDWLRQVGLIIpUHQWLHOOHVHQSK\VLTXH
6\VWqPHVGHFRRUGRQQpHV
caniq
([SUHVVLRQG·XQHYDOHXUQXPpULTXHHQSK\VLTXH
e Mé
6pULHGHPHVXUHVHWORLQRUPDOH
ure d
0HVXUDJHHWLQFHUWLWXGHV
périe
tiona
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
le Su
9pULILFDWLRQG·XQHORLSK\VLTXHHWPRGqOHOLQpDLUH
582:
eTXDWLRQGXVHFRQGGHJUp
6925
2836
4
Avant de chercher les solutions d’une équation ax 2 + bx + c = 0 , il est impératif
d’obtenir des renseignements sur le signe des racines (ou de leur partie réelle) ; pour
cela il suffit de voir le signe de leur somme S = − b a et de leur produit P = c a . En
effet si x1 et x 2 sont les racines de l’équation, on peut l’écrire ( x − x1 ) ( x − x 2 ) = 0 .
La définition de l’angle formé par une direction
quelconque (éventuellement variable) par rapport à une
direction de référence (fixe) est indiquée par une flèche
allant de la référence vers la direction à définir.
Par exemple en optique géométrique, la référence est la
normale au dioptre.
.65.1
α
55.1
59:1
$QJOHVRULHQWpV
:196
réf.
8891
2320
Un choix d’orientation dans le plan contenant l’angle, permet ensuite d’obtenir un angle
α algébrique. Sur la figure a l’angle α est positif, et sur la figure b l’angle α est
négatif (sa définition n’a pas changé).
⊕
0753
582:
⊕
α
:211
α
réf.
Figure a
réf.
y
⊕
techn
iques
Figure b
Micro
Il y a donc deux possibilités d’orientation des angles dans un plan.
Pour le choix d’orientation ci-contre, on parle de sens trigonométrique :
ue e
t des
x
caniq
y
En fait cela signifie que la direction de Oz a été choisie dirigée
vers l’avant de la figure (choix d’orientation de l’espace, cf.
notion de base directe) : on peut dire que l’axe Oz oriente les
Oz :
angles dans le plan auquel il est perpendiculaire.
x
ure d
e Mé
O
e Na
tiona
le Su
côté opposé
AB
côté adjacent OA
=
, cos α =
=
OB
hypoténuse OB
hypoténuse
Écol
10
périe
7ULJRQRPpWULH
sin α =
⊕
&KDSLWUH
Compléments mathématiques
B
côté opposé
AB
=
α
côté adjacent OA
A
O
Ici l’angle α n’est pas orienté, sa mesure est prise positive.
Il faut connaître les formules de trigonométrie, en particulier : sin 2 x + cos 2 x = 1
1 + cos 2 x
1 − cos 2 x
cos 2 x =
; sin 2 x =
; sin 2 x = 2sin x cos x
2
2
C
A
59:1
Relation de Thalès : elle concerne deux
triangles ayant leurs angles égaux deux à
deux ou des côtés parallèles deux à deux
D
(on parle alors de triangles de même
"forme", c’est le cas des triangles homothétiques et des triangles semblables),
exemples ci-contre.
A
AB
CA CB
On a la relation :
=
=
DE CD CE
6925
2836
4
tan α =
C
.65.1
55.1
E
B
B
D
2320
:196
E
8891
3URGXLWVFDODLUH
0753
:211
iques
JG 2
JG
Théorème de Pythagore : V 2 = Vx2 + Vy2 car V 2 = V = || V || 2
JJG JJG
JJG JJG
JJ
G JJG
n
Par définition V1 ⋅ V2 = V1 V2 cos(V1 , V2 )
582:
JG
JG G
JG G
G
G
V = Vx u x + Vy u y avec Vx = V ⋅ u x et Vy = V ⋅ u y
y
G
Micro
techn
Par exemple sur la figure ci-contre, avec l’angle α non orienté u y
(pris positif),
G G
Vx = V ⋅ u x = V cos α > 0 et
G G
π
Vy
Vy = V ⋅ u y = V cos ( + α ) = − V sin α < 0 .
2
G
u x Vx
α
x
JG
V
ue e
t des
Rq : Une condition nécessaire et suffisante pour que deux vecteurs (non nuls) soient
orthogonaux est que leur produit scalaire soit nul.
caniq
3URGXLWYHFWRULHO
e Mé
G
G
G
G
G
Le produit vectoriel de v1 par v 2 est le vecteur w , noté v1 ∧ v 2 et ayant pour
composantes, dans une base orthonormée directe :
tiona
e Na
&RPSOpPHQWVPDWKpPDWLTXHV
le Su
G
G
G
G
v1 ∧ v 2 = − v 2 ∧ v1
Écol
Propriétés :
périe
ure d
§ y1 z 2 − y 2 z 1 ·
§ x1 ·
§ x2 ·
G ¨ ¸
G ¨ ¸
G¨
¸
w ¨ z1 x 2 − z 2 x1 ¸ avec v1 ¨ y1 ¸ et v 2 ¨ y 2 ¸
¨z ¸
¨z ¸
¨x y −x y ¸
2 1 ¹
© 1¹
© 2¹
© 1 2
G
G
G
G
G
G
λ (v1 ∧ v 2 ) = (λ v1 ) ∧ v 2 = v1 ∧ (λ v 2 )
G
G
G
G
G
G
G
v1 ∧ (v 2 + v 3 ) = v1 ∧ v 2 + v1 ∧ v 3
8891
2320
:196
.65.1
55.1
59:1
6925
2836
4
G G
G
G
G
Il est possible d’obtenir w = v1 ∧ v 2 sans projeter les vecteurs v1 et v 2 :
G
G
G
G
G
< direction de w : orthogonal à v1 et à v 2 , donc au plan formé par v1 et v 2 (attention
G
G
v1 et v 2 ne sont pas a priori orthogonaux).
G
G G G
< sens de w : tel que (v1 , v 2 , w) soit direct. Moyens mnémotechniques : tire-bouchon
G
G
G
de Maxwell, on tourne le tire-bouchon de v1 vers v 2 , il se translate suivant w . Ou
G
G
bien la règle des trois doigts de la main droite : pouce suivant v1 , index suivant v 2 ,
G
le majeur indique le sens de w .
G
< norme de w :
G
G
G G
G G
v2
w = v1 v 2 sin(vn
1, v2 )
G
La norme de w représente l’aire du
:
G
G
G
G
parallélogramme construit sur v1 et v 2 .
w
v1
582:
Rq : Une condition nécessaire et suffisante pour que deux vecteurs (non nuls) soient
colinéaires est que leur produit vectoriel soit nul.
Soit f une fonction réelle, n fois
dérivable, d’une variable réelle x . Si x
varie de δ x , y = f ( x) varie de δ y . La
différence importante entre la variation
δ y et la différentielle du premier ordre
dy de y est indiquée sur le graphe cicontre.
:211
0753
'LIIpUHQWLHOOH
iques
y+δy
dy
ue e
t des
Micro
techn
y
δy
x
x +δx
caniq
Si la variation δ x de la variable est assez petite, alors δ y tend vers la différentielle
dy .
Ce résultat est cohérent avec le développement de Taylor de y = f ( x) :
12
ure d
périe
le Su
tiona
ordre f ′( x) δ x .
(δ x) i
étant négligeables devant le terme du 1er
i!
e Na
avec c ∈ ] x, x + δ x [ ; les termes en
e Mé
(δ x) 2
(δ x) n −1 ( n −1)
(δ x) n ( n )
f ′′( x) + ! +
f
( x) +
f (c )
2!
(n − 1) !
n!
Écol
f ( x + δ x) − f ( x) = f ′( x) δ x +
&KDSLWUH
Compléments mathématiques
6925
2836
4
Pour cette raison la variation de la fonction δ y = f ( x + δ x ) − f ( x ) est souvent
(abusivement) notée en physique dy . Il faut donc, en fonction du contexte, repérer s’il
s’agit d’une petite variation de fonction ou de sa différentielle qui en constitue une
valeur approchée au 1er ordre.
59:1
De plus il faut se garder de noter tout infiniment petit comme la différentielle d’une
fonction, car il existe des quantités infiniment petites qui ne sont pas des différentielles,
la notation δ s’impose alors. Exemples : travail élémentaire δ W , transfert thermique
élémentaire δ Q , et a priori une "forme différentielle" (bien mal nommée !)
A du + B dv .
55.1
Traitons le cas de la fonction identité f ( x ) = x :
:196
δx
dx
582:
8891
x
2320
x +δx
.65.1
y= x
x +δx
x
0753
x
ue e
t des
Micro
techn
iques
:211
Si x est la variable alors δ x = dx (voir ci-dessus) et on peut écrire dans le cas où y
fonction quelconque de x :
dy = f ′( x) dx
dy
.
Ce qui fournit une écriture intéressante pour la dérivée : f ′( x) =
dx
Dans cette relation y et x sont sur le même plan, la distinction fonction et variable
s’est estompée, y et x sont des grandeurs variables, au sens physique, dont les
différentielles (et donc les petites variations) sont liées par la relation précédente. Dans
cette relation dx ou dy peuvent être remplacées par leur expression en fonction
d’autres grandeurs dont elles dépendent.
e Mé
caniq
Exemple : y = k x 2 et x = sin (ω t ) , k et ω sont des constantes
dy = 2 k x dx et dx = ω cos (ω t ) dt
on en déduit dy = 2 k ω sin (ω t ) cos (ω t ) dt
ure d
&DOFXOGHSHWLWHVYDULDWLRQVHWVRPPHG·LQILQLPHQWSHWLWV
périe
a) La différentielle est une valeur approchée au 1er ordre de la variation
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
Prenons l’exemple d’une plaque carrée de côté a, l’aire de sa
surface est S = a 2 . Si on augmente la longueur du côté de δ a , la
a
δa
a
δa
nouvelle aire est ( a + δ a ) = a 2 + 2a δ a + (δ a )
aisément sur la figure ci-contre.
2
2
où chaque terme s’interprète
La variation de S est δ S = 2a δ a + (δ a ) ≈ 2a δ a .
2
6925
2836
4
Or dS = d (a 2 ) = 2a da , si δ a est infiniment petit il vient δ S ≈ dS au 1er ordre.
59:1
b) Si une valeur infiniment petite d’une grandeur peut s’écrire comme une
différentielle, alors une somme des infiniment petits correspondants peut être
calculée avec une intégrale (voir exemple dans Surfaces et volumes).
.65.1
1
Bh
2
B
:196
Triangle : surface S =
55.1
6XUIDFHVHWYROXPHV
θ
O
R
l
A
8891
2320
Cercle : si R est le rayon, la circonférence est L = 2π R ; plus
généralement, la longueur d’un arc intercepté par l’angle au centre θ
AB = R θ .
est l = p
B
dl
dθ
R
A
iques
:211
O
techn
1
δ S ≈ R Rd θ . Or pour dθ → 0 , δ S → dS et donc
2
1 2
dS = R d θ et
2
S
2π 1
1
2π
S = ³ dS = ³
R 2 dθ = R 2 [ θ ] 0 = π R 2
0
0
2
2
0753
582:
Disque : si R est le rayon, la surface est S = π R 2 .
En effet l’aire du secteur limité par l’angle d θ est au 1erordre en
AB = R dθ , soit
considérant l’aire du triangle OAB avec AB ≈ p
Micro
Cylindre droit : si R est le rayon et h la hauteur, la surface latérale est S = 2π Rh et le
volume V = π R 2 h .
ue e
t des
Sphère : si R est le rayon, la surface de la sphère est S = 4π R 2 ; son volume
4
V = π R3 .
3
e Na
Écol
14
tiona
le Su
périe
ure d
e Mé
caniq
Quelques éléments de surface et volume :
* élément de surface pour une couronne circulaire entre r et r + dr : 2π rdr .
* élément de volume pour une couche cylindrique entre r et r + dr : 2π rdrh .
* élément de volume pour une coquille sphérique entre r et r + dr : 4π r 2 dr .
&KDSLWUH
Compléments mathématiques
$XWUHVDSSOLFDWLRQVGXFDOFXOGLIIpUHQWLHO
x
tel que
ln(1 ± x) ≈ ± x ;
1± x ≈ 1±
sin x ≈ x ;
| x | 1 , on a
e± x ≈ 1 ± x ;
cos x ≈ 1 − x 2 / 2 ; tan x ≈ x ;
1
1
≈ 1− x ;
≈ 1+ x ;
1+ x
1− x
(1 ± x)α ≈ 1 ± α x ;
6925
2836
4
a) Pour
x
,…
2
§ d 2y ·
s’écrit : ¨ 2 ¸ ; attention numérateur et
© dx ¹
dénominateur ne peuvent pas ici être séparés, il s’agit d’une écriture symbolique pour
d (dy / dx)
.
dx
c) Dérivée de fonctions, d’une variable, composées : la grandeur y dépend de x qui
dy dy dx
dépend de t alors
=
. Comme souvent en physique, la notation y
dt
dx dt
représente ici une grandeur, a priori variable, sa notation est inchangée qu’on la
considère fonction de x ou de t .
59:1
f
8891
2320
:196
.65.1
55.1
b) La dérivée d’ordre deux de
:211
0753
582:
Généralisation : si u ( x, y ) est une fonction de deux variables, sa différentielle
∂u
∂u
s’exprime en fonction des différentielles de x et y par : du =
dx + dy
∂x
∂y
Exemples :
1) u = xy donne du = xdy + ydx
ue e
t des
Micro
techn
iques
2) u = k x α y β ..il est alors préférable de différentier :
du
dx
dy
ln (u ) = ln (k ) + α ln ( x) + β ln ( y ) , ce qui donne
=α
+β
u
x
y
3) PV = nRT avec P, V et T variables a priori, les différentielles qui sont des
dP dV
dT
valeurs approchées des petites variations, sont liées par
+
=
P
V
T
8QHJUDQGHXUSHWLWHQHGRLWrWUHSULVHQXOOH
ure d
e Mé
caniq
De la même manière qu’en mathématique une fonction n’est pas « équivalente à zéro »,
en physique non plus une grandeur petite ne doit être prise nulle ; si elle intervient dans
une fonction, il suffit (en général) de prendre le premier terme non nul du
développement limité de cette fonction.
En revanche, à l’ordre 1 en ε , on a simplement
ε . f (ε ) = ε [ f (0) + f ′(0)ε + ...] ≈ ε . f (0) .
périe
/HVFRXUEHVSDUDPpWUpHVHWOHVGpSKDVDJHV
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
a) Lorsque les coordonnées d’espace x et y dépendent du temps, les deux équations
horaires définissent un système paramétré (le paramètre est t) :
­° x(t ) = a cos ( ω t )
®
°̄ y ( t ) = a sin ( ω t )
y
soit les équations paramétriques
a
x
a
Si les deux amplitudes sont différentes,
­° x(t ) = a cos ( ω t )
la courbe y ( x ) au lieu d’être inscrite
®
°̄ y ( t ) = b sin ( ω t )
y
59:1
b
6925
2836
4
d’un cercle : x 2 + y 2 = a 2 , de rayon a.
x
a
55.1
dans un carré de coté 2 a , est inscrite dans un rectangle
.65.1
( 2 a, 2 b ) , c’est une ellipse.
2320
:196
b) Soient deux grandeurs sinusoïdales synchrones (de même pulsation) :
­° u1 (t ) = U 1 2 cos ( ω t + ϕ1 )
en changeant l’origine des dates avec ωt ′ = ωt + ϕ1
®
°̄ u 2 ( t ) = U 2 2 cos ( ω t + ϕ 2 )
582:
8891
­° u1 (t ′) = U 1 2 cos ( ω t ′ )
­° u1 (t ) = U 1 2 cos ( ω t )
que
l’on
écrit
:
®
®
°̄ u 2 ( t ′ ) = U 2 2 cos ( ω t ′ + ϕ 2 − ϕ1 )
°̄ u 2 ( t ) = U 2 2 cos ( ω t + ϕ )
0753
ϕ est l’avance de phase de u 2 sur u1 :
:211
si ϕ > 0 u 2 (t ) est en avance sur u1 (t )
iques
si ϕ < 0 u 2 (t ) est en retard sur u1 (t )
ϕ = 0 u1 (t ) et u 2 (t ) sont en phase
ϕ =π
Micro
techn
u1 (t ) et u 2 (t ) sont en opposition de phase
Voir les autres cas dans la question 1. du chapitre 1.
ue e
t des
/HVQRPEUHVFRPSOH[HV
Dans l’écriture u = a + i b , avec i 2 = −1 , a est la partie réelle et b la partie imaginaire.
On définit le module u = a 2 + b 2
ure d
e Mé
caniq
§ a
b ·
a
b
u = u ¨¨
+i
≤ 1 et − 1 ≤
≤1
¸¸ avec − 1 ≤
u ¹
u
u
© u
a
b
Il existe donc ϕ tel que
= cos ϕ et
= sin ϕ
u
u
périe
u = u ( sin ϕ + i cos ϕ ) = u e iϕ , ϕ est l’argument de u , ϕ = arg u et ϕ ∈ ] −π , +π ]
e Na
Écol
16
tiona
le Su
L’argument d’un réel positif est égal à 0, celui d’un réel négatif est égal à π .
&KDSLWUH
Compléments mathématiques
On a donc :
cos ϕ =
a
b
, sin ϕ =
u
u
tan ϕ =
et
b
a
y
6925
2836
4
u
b
u
ϕ
Propriétés :
x
a
O
59:1
Interprétation graphique :
.65.1
§u ·
arg ¨ 1 ¸ = arg(u1 ) − arg(u 2 )
© u2 ¹
8891
u
u1
= 1
u2
u2
2320
u
u1
= 1 e i ( ϕ1 − ϕ 2 )
u2
u2
582:
Soit u =
arg(u1 u 2 ) = arg(u1 ) + arg(u 2 )
:196
u1 u 2 = u1 u 2
55.1
Soit u = u1 u 2 = u1 e iϕ1 u 2 e iϕ 2 = u1 u 2 e i (ϕ1 + ϕ 2 )
Micro
techn
iques
:211
0753
Ces propriétés montrent l’inutilité de faire apparaître les parties réelle et imaginaire pour
un produit ou un rapport de complexes. Le développement d’un produit de complexes
ou la multiplication par l’expression conjuguée du dénominateur est, en général, une
maladresse compliquant inutilement le calcul.
En physique l’écriture d’un rapport avec dénominateur complexe est autorisée et même
recommandée ! Les calculs utilisant les nombres complexes doivent être conduits en
gardant soigneusement les factorisations.
Pour chaque facteur complexe, il faut donc être capable de calculer module et argument.
Calcul de l’argument à partir des parties réelle et imaginaire
tan ϕ =
b
a
ue e
t des
u = a+i b
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
périe
ure d
e Mé
caniq
§b· º π πª
Attention : arctan ¨ ¸ ∈ » − , « alors que ϕ ∈ ] −π , +π ] , la fonction " tan −1 " des
©a¹ ¼ 2 2¬
calculatrices donne arctan et pas ϕ , il faut donc tenir compte des signes de a et de b
pour trouver ϕ .
§b·
Si a > 0 soit cos ϕ > 0 , alors ϕ = arctan ¨ ¸
©a¹
§b·
Si a < 0 soit cos ϕ < 0 , alors : < si b > 0 ϕ = arctan ¨ ¸ + π
©a¹
§b·
< si b < 0 ϕ = arctan ¨ ¸ − π
©a¹
Noter le moyen mnémotechnique :
sin ϕ > 0 on ajoute π
sin ϕ < 0 on retranche π
G
G G
Soit u , unitaire, dans le plan ( u x , u y ) et entièrement défini
6925
2836
4
'pULYDWLRQG·XQYHFWHXUSDUUDSSRUWjXQDQJOH
y
iques
&DUDFWpULVWLTXHVVLPSOHVG·XQHHOOLSVH 036, :211
0753
582:
8891
2320
:196
.65.1
55.1
59:1
par l’angle θ qu’il forme avec l’axe polaire Ox . Le vecteur
G
G
u ne dépend que de θ . Sa dérivée par rapport à θ est :
u
G
G
G
du
§ u (θ + δθ ) − u (θ ) ·
= lim ¨
x
θ
¸ avec
δθ
→
0
dθ
δθ
©
¹
G
G
G
O
u = cos θ u x + sin θ u y , soit
G
G
du
sin(θ + δθ ) − sin(θ ) G ·
G
§ cos(θ + δθ ) − cos(θ ) G
ux +
u y ¸ et comme u x et u y ne
= lim ¨
δθ
→
0
dθ
δθ
δθ
©
¹
dépendent pas de θ :
G
du
d cos(θ ) G
d sin(θ ) G
π G
π G
ux +
u y = cos(θ + ) u x + sin(θ + ) u y , c’est-à-dire un
=
dθ
dθ
dθ
2
2
π
G
⊕
vecteur unitaire qui forme l’angle θ +
avec l’axe polaire.
u′
G
u
2
+π 2
G
G
Le vecteur dérivée u ′ de u est le vecteur directement
axe
G
θ
orthogonal à u .
polaire
O
caniq
ue e
t des
Micro
techn
L’ellipse est inscrite dans un rectangle de côtés 2a et 2b . La distance a est appelée le
demi grand axe, les deux foyers sont distants de 2c .
rP
rA
c
L’excentricité est e =
avec forcément 0 ≤ e < 1 ( e = 0 est
a
M
un cercle et lorsque e augmente, l’ellipse s’aplatit.
b
P
Si le centre attracteur est en F2 , le point A est l’apogée (point A
F1 O
F2
le plus éloigné) et le point P est le périgée (point le plus
c
proche). Les distances correspondantes sont :
a
rA = a + c = a (1 + e ) et rP = a − c = a (1 − e ) .
e Mé
Attention si l’astre de centre F2 est la Terre : rA = RT + h A et rP = RT + h P .
ure d
&HQWUHGHPDVVH
e Na
Écol
18
tiona
le Su
périe
Le centre de masse de deux point matériels M 1 et M 2 de masse m1 et m 2 est le point
noté G, barycentre des deux points affectés de leur masse. Si O est un point origine
JJJJJG
JJJJJG
JJJG
quelconque : m1 OM 1 + m 2 OM 2 = ( m1 + m 2 ) OG .
JJJJJG
JJJJJG G
En choisissant O en G on obtient la relation barycentrique : m1 GM 1 + m 2 GM 2 = 0 .
&KDSLWUH
Compléments mathématiques
Ces relations se généralisent à un système de n points matériels ou au solide, en le
découpant en petits éléments de volume.
JJJJG
n
· JJJG
§ n
¦ m OM = ¨© ¦ m ¹¸ OG
i
i
i =1
6925
2836
4
i =1
i
La relation est associative : les points M 1 et M 2 considérés au début peuvent euxmêmes être des centres de masse de deux sous-systèmes.
59:1
eTXDWLRQVGLIIpUHQWLHOOHVHQSK\VLTXH
55.1
Une équation différentielle est une équation reliant une fonction y d’une variable
.65.1
(de dans en physique), la variable x et les dérivées de la fonction y . Elle est donc
:196
du type f ( y ( n ) , ! , y′′, y′, y, x ) = 0 . Le plus grand ordre des dérivées de y figurant
dans l’équation est l’ordre de l’équation différentielle.
582:
8891
2320
La solution d’une équation différentielle doit toujours être justifiée par une
identification précise du type de l’équation différentielle à résoudre. En physique, la
plupart des équations différentielles à résoudre sont d’un des types décrits ci-dessous,
quand ce n’est pas le cas, l’énoncé donne des indications pour la résolution.
0753
I. ÉQUATIONS DIFFÉRENTIELLES DU PREMIER ORDRE
:211
Elle relie donc y′ , y et x .
iques
1. Équation à variables séparables
ue e
t des
Micro
techn
Dans une équation de la forme y′F ( y ) = G ( x) , on peut séparer ce qui concerne y de
x.
dy
avec dy et dx différentielles, il vient dy F ( y ) = G ( x ) dx , on peut alors
y′ =
dx
intégrer chaque membre et en tirer y ( x ) .
Exemple : y 2 y′ = cos( x )
y 2 dy = cos( x) dx y 3 / 3 = sin( x) + C1 y = ( 3 sin( x) + C 2 )
1/ 3
caniq
La constante d’intégration C 2 est fixée par les conditions aux limites).
e Mé
2. Équation différentielle linéaire du 1er ordre à coefficients constants
périe
ure d
Il s’agit d’une équation du type ay′ + by = f ( x ) avec a et b deux constantes (réelles
en physique), appelées coefficients de l’équation différentielle linéaire. La notion de
coefficients n’a de sens que pour une équation différentielle linéaire !
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
Le caractère linéaire de l’équation différentielle est lié à une propriété de l’équation, dite
homogène, associée à l’équation différentielle et définie par : ay′ + by = 0 . Si on écrit
6925
2836
4
l’équation homogène sous la forme générale G ( y ) = 0 , alors G possède une propriété
de linéarité par rapport à y , en effet :
G ( y1 + y 2 ) = G ( y1 ) + G ( y 2 ) et G (λ y ) = λ G ( y ) .
G ( y ) est alors nécessairement du type ay′ + by . Le second membre f ( x ) de l’équation
différentielle linéaire n’a pas d’influence sur le type de l’équation différentielle.
x
:196
b
2320
−
a. Recherche de y G solution de ay′ + by = 0 : y G = A e a
.65.1
55.1
59:1
La solution y ( x) de l’équation ay′ + by = f ( x ) est la somme :
Ɣ de la solution générale de l’équation sans second membre ( ay′ + by = 0 ) ou
équation homogène : solution notée y G
et
Ɣ d’une solution particulière de l’équation complète, notée y P
b. Recherche de y P solution particulière de ay′ + by = f ( x)
−
b
x
582:
8891
Méthode 1 : On pose y = λ ( x) e a et on remplace dans l’équation, on en déduit
λ ′( x) puis λ ( x) .
:211
0753
Méthode 2 : On cherche directement y P de la même forme que le 2nd membre
f ( x) (même méthode que pour une équation du second ordre, voir §
II-2-b).
iques
Cas particulier : f ( x ) = C = cste , alors y P est une constante, en remplaçant il vient :
b
− x
C
C
. Dans ce cas la solution est y =
+ A e a , la
b
b
constante d’intégration A est déterminée par les conditions initiales ou aux limites.
Micro
techn
a × 0 + by P = C y P =
3. Application à des systèmes physiques
caniq
ue e
t des
a. Équation différentielle linéaire du 1er ordre avec second membre constant
du
Soit l’équation τ
+ u = U 0 avec U 0 = constante , correspondant par exemple à la
dt
réponse à un échelon de tension des dipôles R L ou R C . La constante positive τ est
un paramètre caractéristique important du système, comme on va le voir par la suite.
e Mé
La solution est u = u G + u P avec :
t
−
du
+ u = 0 soit u G = A e τ .
dt
L’équation homogène correspond à une évolution du système linéaire (au sens
différentiel) en l’absence d’apport d’énergie extérieure, par exemple en électrocinétique
en l’absence de source de tension ou de courant. Ce qui se traduit notamment par un
second membre de l’équation différentielle nul. On dit que le système évolue librement
e Na
Écol
20
tiona
le Su
périe
ure d
Ź u G solution de l’équation homogène τ
&KDSLWUH
Compléments mathématiques
−
6925
2836
4
et pour cette raison u G est appelée régime libre . Le régime libre peut être observé
seul, à condition que le système, évoluant librement, possède initialement de l’énergie
(cf. conditions initiales à choisir en conséquence). On retrouve ainsi que le système
physique est caractérisé par le premier membre de l’équation différentielle, c’est-à-dire
le type de l’équation différentielle au sens mathématique, le second membre traduisant
la présence ou non d’un excitateur extérieur et correspondant à des formes
mathématiques diverses (dans cet exemple une constante U 0 ).
t
55.1
59:1
On constate que u G = A e τ tend vers 0 quand t → ∞ ou plus correctement quand
t τ . Ceci est assez général, pour un système physique réel dont la modélisation n’est
pas trop simplifiée, le régime libre finit toujours par tendre vers 0 : ceci correspond à
une dissipation inéluctable de l’énergie initiale.
:196
.65.1
Ź u P solution particulière de l’équation complète est ici du type constante, en
remplaçant on trouve u P = U 0 .
2320
La forme de la solution u P est imposée par l’excitateur extérieur (le second membre),
8891
pour cette raison u P est appelée régime forcé . Dans cet exemple il s’agit d’un régime
forcé continu.
Comme on l’a vu, on a u G → 0 pour t τ , donc au bout d’une durée suffisante
0753
582:
u ≈ u P et on finit toujours par obtenir le régime forcé.
:211
À partir de l’instant initial, on observe donc une évolution en deux étapes
temporelles :
techn
iques
Ź tant que u G n’est pas négligeable alors u = u G + u P , il s’agit du régime
transitoire, il dure donc de l’ordre de quelques τ
Micro
Ź puis u G devenant négligeable on a u ≈ u P et on observe le régime forcé.
caniq
ue e
t des
b. Équation différentielle linéaire du 1er ordre avec second membre sinusoïdal
du
Soit l’équation τ
+ u = u0 cos ω t avec u 0 = constante , correspondant par exemple à
dt
la réponse à une excitation en tension sinusoïdale (générateur) des dipôles R L ou
RC.
e Mé
La solution est à nouveau u = u G + u P avec :
t
périe
ure d
−
du
Ź u G solution de l’équation homogène τ
+ u = 0 soit u G = A e τ .
dt
Comme précédemment, en l’absence d’excitation, uG est le régime libre, et u G tend
vers 0 quand t → ∞ ( t τ ).
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
Ź u P solution particulière de l’équation complète est ici recherchée sous la forme
d’une fonction de même pulsation ω que l’excitation, mais déphasée (retard ϕ ),
6925
2836
4
u P (t ) = U m cos(ωt − ϕ ) , soit en passant par les représentations complexes des grandeurs
sinusoïdales :
u0
u0
( jωτ + 1)u = u0 u = U m e −iϕ =
d’où U m =
et tan ϕ = ωτ
1 + jωτ
1 + ω 2τ 2
La forme de la solution u P est imposée par l’excitateur extérieur (le second membre) ;
pour cette raison, u P est appelé le régime forcé. Dans cet exemple il s’agit d’un régime
forcé sinusoïdal.
55.1
59:1
NB : La détermination des constantes d’intégration doit se faire sur la solution générale
uG (t ) + u P (t ) !
Comme on l’a vu, on a u G → 0 pour t τ , donc au bout d’une durée suffisante
:196
.65.1
u ≈ u P et on finit toujours par obtenir le régime forcé. Même conclusion (sous forme
d’encadré) qu’au a.
2320
II. ÉQUATIONS DIFFÉRENTIELLES DU DEUXIÈME ORDRE
582:
8891
1. Équation différentielle linéaire du 2e ordre, à coefficients constants, sans
second membre
:211
0753
Elle est du type ay′′ + by′ + cy = 0 , avec a , b et c des constantes (réelles en
physique).
On cherche des solutions y de la forme e r x avec r inconnu, mais constant
(indépendant de x ). Il vient :
iques
e r x (ar 2 + br + c) = 0 et ce ∀x ∈ \ ar 2 + br + c = 0
techn
(équation caractéristique).
Micro
1er cas : b 2 − 4ac > 0
L’équation caractéristique admet deux racines réelles r1 et r2 :
ue e
t des
y = A e r1 x + B e r2 x
caniq
2ème cas : b 2 − 4ac < 0
L’équation caractéristique admet deux racines complexes conjuguées :
r1 = α + jβ et r2 = α − jβ (avec j 2 = −1 )
e Mé
y = e α x [λ cos( β x) + μ sin( β x)] ou bien y = C e α x cos ( β x + ϕ )
3ème cas : b 2 − 4ac = 0
ure d
L’équation caractéristique admet une racine double r1 = r2 = −
b
:
2a
périe
y = (mx + p ) e r1 x
e Na
Écol
22
tiona
le Su
Les constantes d’intégration A, B, λ , μ , C , ϕ , m et p sont réelles
&KDSLWUH
Compléments mathématiques
6925
2836
4
2. Équation différentielle linéaire du 2e ordre, à coefficients constants, avec
second membre
Elle est du type ay′′ + by′ + cy = f ( x) , avec a , b et c des constantes réelles.
55.1
59:1
La solution y ( x) de l’équation ay′′ + by′ + cy = f ( x) est la somme :
Ɣ de la solution générale de l’équation sans second membre
( ay′′ + by′ + cy = 0 ) ou équation homogène : solution notée y G
et
Ɣ d’une solution particulière de l’équation complète, notée y P
.65.1
a. Recherche de y G : voir ci-dessus § II-1.
:196
b. Recherche de y P :
2320
Ź Si f ( x) = cste , on cherche y P = cste .
582:
8891
Ź Si f ( x) est un polynôme de degré n en x , on cherche y P sous forme
d’un polynôme de degré n . On trouve les coefficients en remplaçant dans l’équation et
en identifiant. Si c = 0 , y P est un polynôme de degré n + 1 ; si c = 0 et b = 0 , y P
est de degré n + 2 .
iques
:211
0753
Ź Si f ( x) est du type k cos(ω x ) , on cherche y P sous la forme
p cos(ω x) + q sin(ω x) , on détermine p et q en remplaçant dans l’équation et en
identifiant les coefficients des termes en cosinus d’une part et ceux en sinus d’autre part.
On peut également, de manière plus efficace, poser y P de la forme A cos(ω x + ϕ ) et
déterminer A et ϕ par passage par les complexes (Voir § II-3 b. ci-dessous).
Micro
techn
ATTENTION : si ± jω sont racines de l’équation caractéristique, alors p et q ne sont
pas constants ; il faut alors poser y P = x [ p′ cos(ω x) + q′ sin(ω x) ] .
e Mé
caniq
ue e
t des
Ź Si f ( x) est du type k e α x , on cherche y P = λ e α x , et λ en remplaçant.
Là aussi il ne faut pas que α soit racine de l’équation caractéristique, sinon λ n’est pas
une constante ( λ = K x , si α est racine simple et λ = K x 2 si α est racine double).
Ź Si f ( x) est une somme de fonctions F ( x ) + G ( x ) + H ( x ) + ! , on
cherche une solution particulière de ay′′ + by′ + cy = F ( x) , de ay′′ + by′ + cy = G ( x) ,
etc.…
y P est la somme des solutions particulières (par linéarité de l’équation différentielle).
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
périe
ure d
c. On obtient donc y = y G + y P , dans y G il apparaît deux constantes dites
d’intégration, elles sont déterminées par les conditions aux limites imposées au système
(conditions initiales quand la variable est le temps). Ces conditions ne doivent être
appliquées qu’à la solution complète yG + yP et jamais à yG seule. La solution
particulière y P (régime forcé) est donc indépendante des conditions « initiales ».
3. Application à des
des systèmes
systèmes physiques
physiques
a.
a. Équation différentielle
différentielle linéaire
linéaire du
du22eeordre
ordresans
sanssecond
secondmembre
membre
6925
2836
4
* cas particuliers ::
Ź (dd 22yy // dx
dx22)) ++ ωω22yy == 00, , ωω2 2 constante
constante positive,
positive, l’équation
l’équation
caractéristique
caractéristique donne rr 22 == −−ω
ω22
solutions
solutions ±± jω
jω etet yy==AAcos(
cos(
ωωx)x)++BBsin(
sin(
ωωx)x): :
c’est
c’est un oscillateur harmonique.
harmonique.
.65.1
55.1
59:1
Ź (dd 22yy // dx
dx22)) −−ωω22yy == 00, , ωω2 2 constante
constante positive,
positive, l’équation
l’équation
22
22
ωω
x x
caractéristique
caractéristique donne
rr == ωω
solutions
solutions ±±ωω. . Choisir
Choisir y y==AAe e + +BBe −eω− xω x
′chωωxx++BB′sh
′shωωx xsisiles
lesconditions
conditions
lorsque
lorsque les conditions portent
portent sur
sur xx==±±∞∞, , etet yy == AA′ch
portent
portent sur x = 0 .
dd22uu ωω0 0 du
du 2 2
2 2
++
++ωω0 0uu==00 avec
avec QQetetωω
deux
0 0 deux
22
dtdt QQ dtdt
constantes
constantes positives. Elle
Elle décrit
décrit l’évolution
l’évolutiond’un
d’unsystème
systèmeenenrégime
régimelibre,
libre,par
parexemple
exemple
oscillateur
oscillateur mécanique amorti
amorti par
par frottement
frottementfluide
fluideou
ouen
enélectrocinétique,
électrocinétique,l’évolution
l’évolutionenen
l’absence
l’absence de « générateur
générateur »,
», des
des grandeurs
grandeurs électriques
électriquesdans
dansune
uneassociation
associationRLC
RLCsérie
série
ou
ou parallèle.
Q et
et ωω00 sont
sont des
des paramètres
paramètres caractéristiques
caractéristiquesimportants
importantsdudu
Les
Les constantes positives
positives Q
11
système,
système, Q est appelé facteur
facteur de
de qualité
qualité(l’amortissement
(l’amortissementest
estenen ).).
QQ
0753
582:
8891
2320
:196
* cas général : Soit
Soit l’équation
l’équation
soit Q >
1
,, cas
cas d’un
d’un amortissement
amortissementfaible,
faible,les
lesracines
racinesdedel’équation
l’équationcaractécaracté2
techn
Δ<0
iques
:211
Les
Les racines de l’équation
l’équation caractéristique
caractéristique (au
(au sens
sensde
del’équation
l’équationdifférentielle
différentiellelinéaire)
linéaire)
§ § 11
··
ω
rr 22 + 0 r + ω 02 = 0 dépendent
dépendent du
du signe
signedu
dudiscriminant
discriminant ΔΔ==44ωω02 02¨ ¨ 2 2− −1 1¸ ¸: :
Q
© ©4 4QQ
¹¹
Micro
ristique sont
sont complexes
complexes conjuguées
conjuguéesààpartie
partieréelle
réellenégative
négative: :−−
ωω00
ωω0 0
2 2QQ
± ± j ωj ω
caniq
ue e
t des
−−
tt
11
u= A
A ee 22QQ cos
cos ((ωωtt ++ϕϕ)) avec
avecωω== −Δ
−Δ/ /22==ωω0 0 1 1−− 2 2
4 4QQ
ce régime libre
libre est
est qualifié
qualifié de
de pseudopériodique
pseudopériodique, , lala pseudopériode
pseudopériodeestest
2π
T =
ω
1
,, cas
cas d’un
d’un amortissement
amortissementfort,
fort,les
lesracines
racinesdedel’équation
l’équationcaractécaracté2
ristique sont
sont réelles,
réelles, leur
leur somme
somme est
est négative
négativeetetleur
leurproduit
produitpositif,
positif,elles
elles
− β− β
t t
− γ −tγ t
avec
avec
sont négatives,
négatives, on
on les
les note
note −−ββ etet−−γγ. . uu==BBe e ++CCe e
e Mé
soit Q <
ure d
Δ>0
périe
ω 02 = β γ
e Na
Écol
24
tiona
le Su
ce régime libre
libre est
est qualifié
qualifiéd’
d’apériodique
apériodique
&KDSLWUH
&KDSLWUH
Compléments mathématiques
1
, cette égalité mathématique n’est pas réalisable pour un système
2
réel, il s’agit d’un cas limite théorique intermédiaire entre le régime pseudopériodique et le régime apériodique, on le qualifie d’apériodique critique.
soit Q =
La racine double de l’équation caractéristique est −
ω0
2Q
= −ω 0 et la solution
6925
2836
4
Δ=0
de l’équation différentielle u = ( At + B ) e − ω 0 t .
:196
.65.1
55.1
59:1
Dans chaque cas, il apparaît dans l’expression de la solution régime libre, deux
constantes d’intégration (car l’équation différentielle est du second ordre), elles sont
déterminées par les conditions initiales. Ces conditions initiales doivent être telles que le
système possède initialement de l’énergie, si on veut pouvoir observer une évolution
non nulle en régime libre. Par exemple, condensateur initialement chargé pour une
association RLC , ressort étiré pour un oscillateur mécanique.
2320
Dans les trois cas on constate que u tend vers 0 quand t → ∞ ou plus correctement
2π
. On retrouve avec cette modélisation que le
quand t 2Q / ω 0 ou t T0 =
8891
ω0
régime libre tend vers zéro du fait de la dissipation inéluctable de l’énergie initiale.
582:
b. Équation différentielle linéaire du 2e ordre avec second membre sinusoïdal
0753
d 2u ω0 du
+
+ ω02 u = K cos (ωt ) avec Q et ω 02 deux constantes
dt 2 Q dt
positives caractéristiques de l’oscillateur. La pulsation ω est imposée par un excitateur
extérieur.
La solution est u = u G + u P avec :
iques
:211
Soit l’équation
d 2u ω0 du
+
+ ω02 u = 0 est donc le régime
2
dt
Q dt
techn
Ź u G solution de l’équation homogène
Micro
libre étudié ci-dessus au § II-2.
ue e
t des
Ź u P solution particulière de l’équation complète est ici du type imposé par le
second membre soit u p = U m cos (ω t − ϕ ) , elle correspond à un régime sinusoïdal
forcé dont la pulsation ω est imposée par l’excitateur.
On a vu que quel que soit l’amortissement, u G tend vers 0 pour Δt assez grand. Cette
caniq
durée correspond à un régime transitoire pendant lequel u = u G + u P . On peut par
e Mé
exemple observer un phénomène de battements si ω et ω 0 sont du même ordre de
grandeur.
ure d
En fin de régime transitoire, u G est devenue négligeable, on a u ≈ u P et on observe un
régime sinusoïdal forcé.
périe
L’étude du régime sinusoïdal forcé est la recherche de u p = U m cos (ω t − ϕ ) .
le Su
U m est l’amplitude de la réponse forcée et ϕ le retard de phase de cette réponse sur
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
l’excitation. U m et ϕ ne sont pas des constantes d’intégration, leurs valeurs sont fixées
et telles que u P soit solution de l’équation complète. Il est important de noter que le
régime forcé est totalement indépendant des conditions initiales, l’influence des
conditions initiales s’éteint en même temps que le régime libre.
La détermination de U m et ϕ doit se faire impérativement en passant par les
59:1
6925
2836
4
représentations complexes des grandeurs sinusoïdales : U m e j (ω t −ϕ ) et K e jω t . En
remplaçant dans l’équation différentielle :
K
§
·
ω
− jϕ
=
U m e − jϕ ¨ −ω 2 + 0 jω + ω 02 ¸ = K soit U m e
§ 2
ω0 ·
Q
2
©
¹
ω¸
¨ ω0 − ω + j
Q ¹
©
1/ 2
cercle (p, r )
z
8891
G
uθ
p
582:
0753
G
ur
G
ur
:211
M
cercle (p, r sin θ )
θ
O
r
G
uϕ
G
uθ
cercle(O, r )
techn
O
iques
G
uz
p
2320
6\VWqPHVGHFRRUGRQQpHV
z
ω 0ω
Q ( ω 02 − ω 2 )
et tan ϕ =
.65.1
§ 2
·
ω
2 2
ω2 ¸
¨ (ω 0 − ω ) +
Q
©
¹
2
0
2
55.1
K
:196
en prenant K > 0 : U m =
r
ϕ
Micro
θ
x
En coordonnées cylindriques :
dr
JJJJG
dOM r dθ
dz
En coordonnées sphériques :
dr
JJJJG
dOM r dθ
r sin θ d ϕ
ue e
t des
En coordonnées cartésiennes :
dx
JJJJG
dOM dy
dz
caniq
G G G
dans la base ( u x , u y , u z )
G G G
dans la base ( u r , uθ , u ϕ )
e Na
Écol
26
tiona
le Su
périe
ure d
e Mé
G G G
dans la base ( u r , uθ , u z )
&KDSLWUH
Compléments mathématiques
([SUHVVLRQG·XQHYDOHXUQXPpULTXHHQSK\VLTXH
55.1
59:1
6925
2836
4
La signification d’une valeur numérique comme 2,5 par exemple diffère suivant le
contexte.
En Mathématique, il s’agit d’une valeur avec une infinité de 0 après le cinq. On n’en
5
écrit donc aucun. En Mathématique 2,5 c’est .
2
Pour une calculatrice (machine réelle), les choses sont un peu différentes : entrer sur
votre calculatrice 2,5 suivi d’une douzaine de 0 puis d’un 1, retrancher ensuite 2,5. Les
deux nombres, mathématiquement différents, sont égaux pour la calculatrice ! Si ça ne
marche pas augmenter le nombre de 0.
.65.1
En Physique, on indique explicitement avec le nombre de chiffres de la valeur
numérique, la précision avec laquelle la valeur est connue :
2320
:196
X = 2,5 signifie 2, 45 ≤ X < 2,55 , attention ici 2, 45 et 2,55 sont des nombres
mathématiques.
X = 2,500 signifie 2, 4995 ≤ X < 2,5005 .
8891
6pULHGHPHVXUHVHWORLQRUPDOH
iques
:211
0753
582:
Lors de la mesure d’un mesurande A, de valeur cherchée x 0 (valeur vraie), on note xi
une mesure (provenant d’un mesurage). On appelle erreur l’écart entre une mesure et la
valeur vraie : ei = x i − x 0 . La valeur vraie est par nature, inaccessible, donc l’erreur
également. En fait, on se sert de l’erreur et de ses propriétés a priori, pour obtenir un
encadrement de la valeur du mesurande.
On s’intéresse ici au cas où l’erreur est aléatoire, c’est-à-dire due à des variations
imprévisibles de la mesure xi (les causes possibles sont développées au paragraphe
techn
suivant). Ces variations se traduisent par une dispersion des valeurs ei .
Micro
Alors les mathématiques indiquent qu’un nombre infini de valeurs de ei ,
correspondent à une variable aléatoire E qui suit la loi de Gauss ou loi normale :
−3σ −2σ −σ
σ
0
ure d
e Mé
caniq
ue e
t des
G (e )
2σ
e
3σ
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
périe
G (e) est une densité de probabilité, c'est-à-dire que la probabilité pour qu’une erreur ei
ait une valeur comprise entre e et e + de est G (e) de , qui correspond à une aire sous la
courbe de Gauss.
6925
2836
4
La courbe est centrée sur 0 (valeur moyenne qui est aussi la plus probable), la valeur σ
est appelée écart-type.
On peut revenir aux mesures xi , xi = x 0 + ei , donc un nombre infini de valeurs de xi
correspond à une variable aléatoire X qui suit une loi normale centrée sur la valeur
moyenne notée x (ici x 0 ) et d’écart-type σ .
55.1
59:1
G ( x)
.65.1
0,1
x −σ
:196
x
x +σ
x
2320
L’aire sous la courbe entre deux valeurs x1 et x 2 est proportionnelle au nombre de
8891
valeurs xi comprises entre x1 et x 2 . Les propriétés de la loi normale indiquent que
:211
0753
582:
68% des valeurs sont entre x − σ et x + σ , et 95% entre x − 2σ et x + 2σ :
68%
iques
techn
x
x +σ
x −2σ
x
x +2σ
Micro
x −σ
95%
ue e
t des
On peut aussi dire qu’une mesure au hasard a 95% de chance d’avoir une valeur dans
[ x − 2σ , x + 2σ ]
e Na
Écol
28
tiona
le Su
périe
ure d
e Mé
caniq
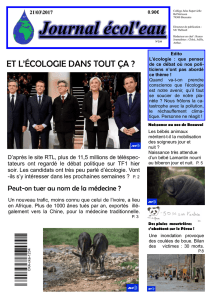
Lors d’une série réelle de mesures, forcément en nombre fini, on peut être tenté de
tracer un histogramme : mesures en abscisse et fréquence d’obtention en ordonnée.
Celui-ci a peu de chance de ressembler à une loi normale, même si les erreurs sont
aléatoires, car mathématiquement il faut un nombre infini de valeurs. De plus sa forme
dépend beaucoup du pas choisi en abscisse pour regrouper (discrétiser) les valeurs de
mesure.
Voici, par exemple l’histogramme des mesures du TP Mesure de la masse de Jupiter du
chapitre 8., avec le satellite Europe, effectuées par plusieurs expérimentateurs. La masse
est en 10 27 kg :
&KDSLWUH
Compléments mathématiques
Histogramme Europe
Histogramme Europe
12
7
6
10
4
3
2
1
8
6
4
2
0
2,
35
2,
25
2,
15
1,6
1,7
1,8
1,9
2
2,1
2,2
Pas de 0,1
ou
plus...
55.1
Pas de 0,05
2,3
59:1
2,
05
1,
95
1,
85
1,
75
1,
65
1,
55
0
6925
2836
4
Fréquence
Fréquence
5
:196
.65.1
Heureusement, une répartition exactement normale des valeurs xi n’est pas obligatoire
pour le traitement statistique de la série de mesures.
Il est possible sur un nombre fini n de valeurs, de calculer une valeur moyenne et un
écart type définis par :
1 n
1 n
2
xi et sn =
( xi − xn )
¦
¦
n − 1 i =1
n i =1
Attention de ne pas confondre ces valeurs et les caractéristiques de même nom de la loi
normale. Les résultats sur les pourcentages de répartition des valeurs, vus pour la loi
normale, ne s’appliquent pas à cette série finie. Ces formules ne sont pas à connaître, les
calculatrices, en mode statistique, les donnent directement.
0753
582:
8891
2320
xn =
σ
techn
départ) et d’écart-type
iques
:211
Comment traiter alors une série d’un nombre n fini de valeurs ? Les mathématiques
fournissent la solution.
On considère p séries de n valeurs (n fini) parmi un nombre N infini de valeurs,
N = p n , avec p infini. On montre (théorème limite central) que les valeurs moyennes
x n ont une répartition normale de valeur moyenne x (la même que la distribution de
ue e
t des
Micro
(plus étroit que l’écart-type de la distribution de départ). Ce
n
résultat s’applique même si la distribution initiale (des N valeurs) n’est pas strictement
normale.
σ
n
de x , soit :
e Mé
que x n est à moins de 2
caniq
Considérons une série de n mesures d’une même grandeur. La valeur moyenne de la
σ
σ º
ª
série x n a donc 95% de chance d’appartenir à « x − 2
,x+2
» . Ce qui signifie
n
n¼
¬
ure d
σ
σ º
ª
x ∈ « xn − 2
, xn + 2
»
n
n¼
¬
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
périe
Donc avec une seule valeur x n , on a accès à un encadrement de x , avec une
probabilité, on parle de niveau de confiance, de 95% !
Reste le problème de la valeur de σ , remplacé par un estimateur, le seul dont on
dispose, l’écart-type de la série finie s n . Pour compenser, il faut remplacer le 2 par un
coefficient de Student t n qui dépend du nombre de valeurs de la série.
n
2
3
4
5
6
7
8
9
10
20
t95%
12,7
4,3
3,18
2,78
2,57
2,45
2,37
2,31
2,26
2,09
2,02
∞
1,96
59:1
Finalement on obtient un intervalle à niveau de confiance de 95% :
6925
2836
4
40
.65.1
55.1
s
s º
ª
x0 ∈ « xn − t n n , x n + t n n »
n
n¼
¬
2
3
4
5
6
7
8
9
10
t68%
1,84
1,32
1,20
1,14
1,11
1,09
1,08
1,07
1,06
20
40
1,03
1,01
∞
1
8891
2320
n
:196
Si on se contente d’un niveau de confiance moindre de 68%, le coefficient de Student
est donné par :
:211
0753
582:
Le coefficient de Student est qualifié de facteur d’élargissement et est souvent noté k.
s
L’incertitude U = k n est appelée incertitude élargie. Les tableaux montrent qu’à
n
partir d’une dizaine de valeurs, le facteur d’élargissement est quasiment 1 à 68% et 2 à
95%.
iques
Exemple : voir le TP mesure de la masse de Jupiter, fin de la question 60. chapitre 8. ou
la mesure de la vitesse du son dans l’air question 73. chapitre 1.
Micro
techn
0HVXUDJHHWLQFHUWLWXGHV
1. Nécessité de l’incertitude
ue e
t des
Le résultat du mesurage de la valeur d’un mesurande consiste à définir un intervalle
dans lequel on pense avoir une bonne probabilité que se trouve la valeur cherchée.
La valeur vraie du mesurande est inaccessible.
caniq
Cet intervalle n’est en aucun cas l’écart à une valeur théorique ou une valeur
attendue ! En effet, il suffit d’imaginer celui qui mesure une grandeur pour la
première fois, où ira-t-il chercher la valeur attendue ?
périe
ure d
e Mé
Exemple : une détermination de la distance Terre-Soleil par Cassini en 1672,
utilisant une opposition favorable de Mars et la troisième loi de Kepler (1619),
donne 146 106 km. Il lui faut alors trouver un intervalle dans lequel se trouve la
valeur de cette distance, sans référence possible à une valeur théorique puisqu’il est
le premier à faire cette mesure.
e Na
Écol
30
tiona
le Su
Préciser l’incertitude sur une mesure est indispensable. Sans l’incertitude, la mesure
est inutilisable, elle ne peut pas être exploitée pour valider ou infirmer une théorie
ou faire de nouvelles découvertes.
&KDSLWUH
Compléments mathématiques
iques
:211
0753
582:
8891
2320
:196
.65.1
55.1
59:1
6925
2836
4
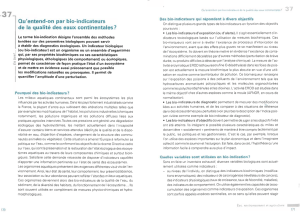
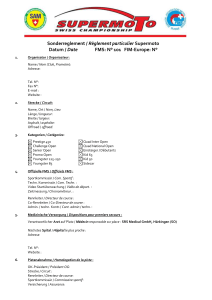
Exemple :
caniq
ue e
t des
Micro
techn
Le graphe représente la courbe de vitesse radiale de l’étoile 51 Pégase. Les
astronomes suisses Michel Mayor et Didier Queloz ont pu, grâce aux incertitudes
sur chaque mesure (représentées par les segments verticaux), conclure
expérimentalement à la variation sinusoïdale de cette vitesse. Cette variation peut
alors s’expliquer par la présence autour de l’étoile d’une planète massive qui par son
mouvement entraîne un déplacement de l’étoile autour du centre de masse de
l’ensemble. La première planète extrasolaire vient d’être découverte (1997). On
conçoit facilement que les astronomes suisses pour conclure sur leur formidable
découverte n’ont pas eu accès à la courbe théorique de variation de vitesse de 51
Pégase ! Sans les incertitudes de mesure, la conclusion n’était pas possible.
e Mé
2. Le but du mesurage
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
périe
ure d
On veut pouvoir écrire comme résultat du mesurage du mesurande A, de mesure X :
A = X ± U ou A ∈ [ X − U , X + U ] avec un niveau de confiance, par exemple
de 95%.
Avec U incertitude absolue élargie
U
incertitude relative (correspondant à un pourcentage)
X
3. Les outils
6925
2836
4
On appelle erreur l’écart entre une mesure xi et la valeur vraie : ei = x i − x 0 . La
valeur vraie est par nature, inaccessible, donc l’erreur également. En fait, on se sert
de l’erreur et de ses propriétés a priori, pour obtenir un encadrement de la valeur du
mesurande. Les erreurs sont dues aux instruments de mesure, à l’expérimentateur,
au protocole expérimental et à la variabilité éventuelle de la grandeur à mesurer.
Il existe deux types d’erreurs :
.65.1
55.1
59:1
• Erreur aléatoire : elle est due à des variations imprévisibles de la mesure. Elle
se traduit par une dispersion des valeurs lors de mesures répétées dans les
mêmes conditions expérimentales. Si la dispersion des valeurs est faible, la
mesure est dite fidèle. Ce type d’erreur n’affecte pas la moyenne des mesures.
En augmentant le nombre de mesures, on peut par traitement statistique réduire
ses effets sur l’incertitude de mesure.
0753
582:
8891
2320
:196
• Erreur systématique : comme son nom l’indique, elle correspond à une
mesure systématiquement décalée par rapport à la valeur vraie, toujours dans le
même sens. Elle peut être due à un mauvais étalonnage, au vieillissement d’un
appareil ou liée au protocole lui-même. Les facteurs d’influence (température,
pression…) peuvent être à l’origine de ce type d’erreur. Si elle est décelée (ce
qui n’est en général pas simple) on essaye de la corriger (des exemples sont
traités dans différentes questions de TP). L’erreur systématique affecte la
justesse de la mesure. Augmenter le nombre de mesures ne permet pas de
réduire son effet sur l’incertitude de mesure.
iques
:211
Une analogie avec une cible de tir à l’arc
permet de comprendre la différence entre
fidélité et justesse.
techn
Cible 1 : tirs peu fidèles (tireur débutant),
mais juste (l’arc est bien réglé)
Cible 2 : tirs fidèles (tireur expérimenté),
mais pas justes (l’arc est déréglé)
cible 1
Micro
cible 2
ue e
t des
On envisage dans un premier temps le traitement des erreurs aléatoires.
4. Mesure directe du mesurande
e Na
Écol
32
tiona
le Su
périe
ure d
e Mé
caniq
a) Si on dispose d’une série de mesures, on procède directement au traitement
statistique, voir l’exemple à la partie précédente série de mesure et loi normale.
La mesure est X = x n . L’incertitude-type donnée par le traitement statistique est
appelée évaluation de type A. Pour pouvoir appliquer cette évaluation, il ne
suffit pas de répéter plusieurs fois la mesure, il faut que cette répétition se
traduise par une dispersion significative des valeurs. Si on demande à plusieurs
personnes de mesurer une même longueur de l’ordre de 10 cm, avec une même
règle graduée en mm, toutes les valeurs seront quasiment les mêmes. Il n’y a pas
de dispersion significative. La même expérience avec une règle graduée en cm,
va produire une dispersion des valeurs, due à l’interpolation, entre deux
&KDSLWUH
Compléments mathématiques
graduations, différente d’un individu à l’autre, et cette dispersion est significative
de l’imprécision liée à la règle peu adaptée.
6925
2836
4
b) Dans le cas d’une mesure isolée, on procède à l’évaluation des erreurs possibles
et à leur contribution à l’incertitude-type sur la mesure. La mesure est X : mesure
unique. L’incertitude-type est dans ce cas composée, elle résulte de plusieurs
incertitude-type liées à chaque source d’erreur. Ce sont les évaluations de type B
de l’incertitude-type. Elles s’appuient sur des lois de probabilités supposées a
priori.
:196
.65.1
55.1
59:1
• Lecture sur une échelle graduée
1 graduation
u=
à 95%, avec un facteur d’élargissement k = 2 :
12
1 graduation
U = 2×u =
3
2320
Ceci signifie que statistiquement on ne peut pas sur chaque mesure faire une
erreur maximale d’une graduation.
3
à 95% : U = 2
α
3
582:
α
0753
u=
8891
• Instrument vérifié de classe α
Le constructeur indique la classe définie par une limite ±α ( on parle aussi de
tolérance) :
:211
• Instrument étalonné
Le constructeur indique directement U, en général à 95%.
u=
p × valeur lue N digit
+
3
3
U =2
résistance
affiche
R = 200 Ω
avec
une
tolérance
de
à 95%.
2%,
alors
e Mé
Une
p × valeur lue + N digit
3
caniq
Exemples :
ue e
t des
Micro
techn
iques
• Appareil numérique
Le constructeur indique pour la précision un pourcentage p de la valeur lue et
un nombre N de digit (un digit correspond au dernier chiffre affiché). p
correspond à une erreur de calibrage (variable d’un appareil à l’autre), donc
systématique. Elle peut devenir aléatoire si on répète la mesure avec des
appareils différents de la même série, et être traitée par une évaluation de type
A. N correspond à une erreur aléatoire de type bruit de fond.
α = 200 × 2% = 4 Ω et l’incertitude-type vaut u = 4 / 3 ≈ 2,3 Ω (au niveau de
ure d
confiance 68 %) et U = 2u ≈ 4, 6 Ω à 95%.
périe
La résistance est donc R = ( 200 ± 5) Ω au niveau de confiance 95 %.
le Su
Une pipette indique 25 mL avec une tolérance de 0,05 mL, l’incertitude-type sur la
mesure du volume est U = 2 × 0, 05 / 3 ≈ 0, 058 mL (à 95 % de confiance) donc le
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
volume prélevé est V = ( 25, 00 ± 0, 06 ) mL au niveau de confiance 95 %.
Un ampèremètre affiche 5, 21 mA , la précision est de ( ( 3% ± 1digit ) qui
correspond donc à U = 2
5, 21 × 0, 03 + 0, 01
= 0,19 mA , l’intensité mesurée est :
3
6925
2836
4
I = ( 5, 2 ± 0, 2 ) mA au niveau de confiance de 95%.
59:1
L’incertitude ne comporte qu’un seul chiffre significatif et la valeur numérique de la
mesure doit être cohérente avec cette incertitude quant au dernier chiffre donné.
.65.1
55.1
On obtient enfin l’incertitude-type sur la mesure X en tenant compte de toutes les
incertitudes composantes, provenant des diverses sources d’erreur indépendantes, à
un même niveau de confiance :
2320
:196
U = U 12 + U 22 + U 32 + !
8891
Exemple : seconde partie des TP questions 75. et 76. du chapitre 4.
5. Mesure indirecte du mesurande : propagation des incertitudes
:211
0753
582:
Dans ce cas on cherche à obtenir la valeur d’une grandeur à partir de la mesure
effective d’autres grandeurs dont elle dépend. On connaît la relation théorique entre
les diverses grandeurs.
iques
Il faut recourir au calcul différentiel, pour relier les incertitudes entre elles.
L’incertitude sur la grandeur cherchée se calcule à partir des incertitudes
déterminées expérimentalement sur les grandeurs mesurées.
Micro
techn
En effet l’incertitude de mesure peut être considérée comme une petite variation
autour de la valeur cherchée. Chaque mesure est a priori différente de la valeur
exacte (inaccessible) mais a une bonne probabilité d’être à une distance inférieure à
l’incertitude de cette valeur exacte (c’est la définition de l’incertitude) :
x0 + U
x0
caniq
x0 − U
ue e
t des
X
e Mé
Il vient donc U = dX max
ure d
L’incertitude composée prend en compte les mesures effectives et leur incertitudetype établies comme au paragraphe 4, de façon quadratique.
périe
Si X = Y + Z dX = dY + dZ U ( X ) = U 2 (Y ) + U 2 ( Z )
le Su
Si X = Y − Z dX = dY − dZ U ( X ) = U 2 (Y ) + U 2 ( Z )
e Na
Écol
34
tiona
Si X = λ Y et λ = cste dX = λ dY U ( X ) =
λ 2U 2 (Y ) = λ U (Y )
&KDSLWUH
Compléments mathématiques
Si X =
2
§ U (Y ) ·
§ U (Z ) ·
¨
¸ +¨
¸
© Y ¹
© Z ¹
U(X )
Y
dX
dY dZ
=
−
=
Z
X
Y
Z
X
Exemples :
2
§ U (Y ) ·
§ U (Z ) ·
¨
¸ +¨
¸
Y
©
¹
© Z ¹
U(X )
dX
dY dZ
=
+
=
X
Y
Z
X
mesure de la vitesse du son, question 73. du chapitre 1
2
2
6925
2836
4
Si X = Y Z
59:1
mesure de fém et résistance interne, question 77. du chapitre 4
55.1
TP question 72. du chapitre 5 et question 52. du chapitre 11.
.65.1
9pULILFDWLRQG·XQHORLSK\VLTXHHWPRGqOHOLQpDLUH
2320
:196
Traitons d’un exemple concret. On cherche à vérifier, avec du matériel assez
rudimentaire, la partie des lois de la réflexion de Descartes traitant des valeurs des
angles d’incidence et de réflexion.
10,0
10,5
15,0
15,5
60,0
61,0
70,0
70,5
80,0
80,0
85,0
85,5
20,0
19,5
25,0
24,5
30,0
30,5
:211
5,0
5,0
35,0
35,5
40,0
40,0
50,0
49,5
iques
0,0
0,0
techn
i (°)
r (°)
0753
582:
8891
On se sert d’un disque optique, gradué en degré, sur lequel on place un petit miroir plan.
Le faisceau incident parallèle, fourni par une simple fente, est envoyé sur le miroir, le
point d’incidence étant le centre du disque. En faisant tourner le disque autour d’un axe
vertical, on fait varier l’angle d’incidence. On relève les valeurs de i et r , que l’on
note i et r, pour diverses valeurs de i.
ue e
t des
Micro
Les valeurs mesurées pour r et i diffèrent sensiblement, ce qui semble en contradiction
avec la loi de Descartes r = i . Justifier cet écart par l’imprécision des mesures pose un
problème de fond. En effet cela revient à considérer la loi de Descartes comme acquise
et à conclure, malgré les mesures, à
l’égalité des angles : l’expérience ne
sert donc à rien si la loi est a priori
considérée comme valide !
ure d
e Mé
caniq
La démarche est donc de conclure
expérimentalement à la relation entre
i et r, sans a priori sur cette relation.
Ceci nécessite de tracer r en fonction
de i et d’essayer de conclure à la
linéarité.
le Su
tiona
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
périe
On trace une droite moyenne, passant
“au plus près” des points de mesure.
L’existence d’une droite moyenne
n’est pas la preuve d’une relation
linéaire entre r et i. Il s’agit simplement d’une linéarisation du graphe de la fonction r(i)
inconnue.
6925
2836
4
Le raisonnement est alors le suivant : Si la relation r(i) est linéaire, l’écart entre les
points de mesure et la droite moyenne est dû à l’imprécision des mesures dont la
propriété principale est d’être aléatoire. Les incertitudes estimées quantifient cette
imprécision. En conséquence les points seront répartis de part et d’autre de la droite
moyenne de façon aléatoire.
.65.1
55.1
59:1
En conclusion, la relation entre r et i (dans notre étude) est probablement linéaire si :
Ɣ Les points de mesure sont de part et d’autre de la droite moyenne
Ɣ Les écarts avec la droite moyenne sont cohérents avec l’incertitude estimée
des mesures.
8891
2320
:196
L’incertitude sur chaque mesure de r est :
1°
× 2 (il y a deux lectures avec le zéro)
• lecture : graduation en degré 2
12
• protocole : réglage initial de la normale, systématique, estimée à 0,5°
• appareil : précision des graduations, incertitude négligeable ici
582:
Soit, à 95% , U = (1,15 2 + 0,5 2 ) 0,5 = 1, 3°
Les écarts constatés correspondent aux incertitudes.
0,99
–0,03
1,002
0,04
1,06
0,07
1,01
0,03
1,004
0,05
0,996
–0,20
1,01
0,02
1,02
0,14
1,00
0,05
1,05
0,00
1,04
0,001
0,99
0,02
1,00
0,01
1,001
0,003
1,01
0,01
0,991
–0,02
0,997
–0,12
ue e
t des
1,09
0,00
1,01
0,10
1,01
0,05
1,01
0,03
0,992
–0,14
0,960
0,02
caniq
1,003
0,12
1,003
0,02
e Mé
a
b
Micro
techn
iques
:211
0753
On peut ensuite déterminer coefficient directeur et ordonnée à l’origine de la droite
moyenne. Le problème de l’erreur systématique liée au réglage de la normale au miroir
(référence des angles) et de la position du point d’incidence au centre du cercle peut être
contourné en rendant cette erreur aléatoire. Pour cela, la même expérience doit être faite
par plusieurs personnes différentes qui ne positionneront pas le miroir de la même
façon.
On donne ci-dessous les valeurs du coefficient directeur a et de l’ordonnée à l’origine b
de l’équation expérimentale r = a i + b , obtenues par 25 expérimentateurs différents.
e Na
Écol
36
tiona
le Su
périe
ure d
Un traitement statistique donne, à un niveau de confiance de 95% :
s
0, 026
≈ 0, 01
a = 1, 01 , s n a = 0, 026 t n n = 2,1
n
25
s
0, 075
≈ 0, 03
b = 0, 011 , s n b = 0, 075 t n n = 2,1
n
25
&KDSLWUH
Compléments mathématiques
L’étude statistique conduit à r = a i + b , avec a = 1, 0 et b = 0, 0 .
La loi est « validée » malgré l’imprécision des mesures.
cas 2
2320
cas 1
:196
.65.1
55.1
59:1
6925
2836
4
Remarquons qu’une étude de régression linéaire, avec une calculatrice, ne prouve pas la
linéarité même avec un bon coefficient de corrélation. Le tracé effectif des points de
mesure est indispensable pour conclure. La régression linéaire peut, après que la
linéarité probable a été établie, fournir coefficient directeur et ordonnée à l’origine.
Les deux cas représentés ci-dessous illustrent le problème
cas B
Micro
cas A
techn
iques
:211
0753
582:
8891
Dans le premier cas, le phénomène est probablement linéaire, les mesures sont
imprécises, le coefficient de corrélation avec la droite moyenne n’est pas bon.
Dans le second cas, le phénomène est sans doute non linéaire avec un bon coefficient de
corrélation.
Si la répartition apparaît comme aléatoire, il reste à justifier les écarts à la droite
moyenne. Les cas ci-dessous illustrent le problème :
cas C
ue e
t des
Dans le cas A, la répartition est compatible avec loi linéaire, il faut justifier les écarts.
Dans le cas B, les incertitudes de mesure n’expliquent pas les écarts observés, la loi est
sans doute non linéaire ou les incertitudes ont été sous-estimées.
caniq
Dans le cas C, les incertitudes de mesure expliquent les écarts observés, la loi est
probablement linéaire.
périe
Les TP traitant de la vérification d’une loi sont :
ure d
e Mé
Une fois la linéarité avérée, on peut avec une régression linéaire, déterminer coefficient
directeur a et ordonnée à l’origine b. Certains logiciels fournissent aussi alors
l’incertitude sur a et b.
e Na
Écol
&RPSOpPHQWVPDWKpPDWLTXHV
tiona
le Su
Vitesse de propagation sur une corde de Melde question 74. chapitre 1
Mesure d’un indice question 69. chapitre 2
Comportement linéaire d’un dipôle questions 75. et 76. chapitre 4
Étude d’un régime pseudopériodique question 58. chapitre 8
Les TP traitant des erreurs systématiques sont :
e Na
Écol
38
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
55.1
59:1
6925
2836
4
Mesure d’une distance focale question 73. chapitre 2
Loi des aires question 59. chapitre 8
Mesure de la masse de Jupiter question 60. chapitre 8
&KDSLWUH
Compléments mathématiques
59:1
6925
2836
4
&KDSLWUH
6LJQDX[KDUPRQLTXHVHW
SURSDJDWLRQ
.65.1
55.1
/HVRUGUHVGHJUDQGHXUXWLOHV
6LJQDX[DFRXVWLTXHV
perception de l’oreille humaine
fréquence du La musical
fréquence des infrasons ; des ultrasons
vitesse du son dans l’air à 20 °C
vitesse du son dans l’eau
vitesse du son dans les solides
582:
8891
2320
:196
20 Hz < f < 20 kHz
440 Hz
f < 20 Hz ; f > 20 kHz
c ≈ 340 m.s−1
c ≈ 1400 m.s−1
c ≈ 3000 à 5000 m.s−1
6LJQDX[pOHFWURPDJQpWLTXHV
secteur domestique
électrocinétique GBF en TP
ondes hertziennes pour radio FM
lumière et vision humaine
iques
:211
0753
f = 50 Hz (λ = 6000 km)
f < 100 kHz (λ > 3 km)
f ≈ 100 MHz (λ ≈ 3 m)
14
f ≈ 10 à 1015 Hz (0, 4 ȝm < λ < 0,8 ȝm)
λ > 0,8 ȝm ; λ < 0, 4 ȝm
c ≈ 3,0.108 m.s−1
ue e
t des
/HFRXUVG·DERUG
Micro
techn
infrarouge ; ultraviolet
célérité de la lumière dans le vide
)RQFWLRQVLQXVRwGDOH
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
périe
ure d
e Mé
caniq
1. a) Tracer l’allure du graphe de y (α ) = Ym cos α , à l’aide de quelques points pour
α , variable non dimensionnée, variant environ entre − π et 4 π . Que représente
Ym ?
b) En utilisant le graphe précédent tracer y (t ) = Ym cos (ω t ) où t est la date et ω
une pulsation qui s’exprime donc en rad.s–1. Exprimer la période T de y (t ) en
fonction de ω . Les notations y (α ) et y (t ) sont-elles gênantes ?
c) Tracer de même le graphe de y1 = Ym cos (ω t − π 2) . Comment ce graphe
pouvait-il être déduit du précédent ? Interpréter en termes de décalage temporel.
d) Donner les divers cas pour y 2 = Ym cos (ω t + ϕ ) avec ϕ algébrique, et
commenter en termes « d’avance » ou de « retard », la référence étant le graphe du
b). On pourra utilement tracer y 2 sur papier calque. Comment peut-on appeler ϕ ?
6925
2836
4
/·RVFLOODWHXUKDUPRQLTXH
.65.1
55.1
59:1
2. On considère le dispositif facilement réalisable : un objet de masse m est accroché à
un ressort vertical. On peut observer soit un équilibre, c’est-à-dire l’immobilité de
l’objet dans le référentiel lié au point d’accrochage (référentiel de la salle de classe
par exemple) ou des oscillations rectilignes verticales, suivant les conditions
initiales, dont l’amplitude dépend de ces conditions initiales.
Citer d’autres exemples d’oscillateurs. Quel est leur point commun ?
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
3. On note Oy l’axe vertical du dispositif précédent et on relève les positions, notées
y (t ) du centre d’inertie de l’objet, au cours du temps. La courbe 1 donne l’ensemble
des points expérimentaux et la courbe 2, les mêmes points reliés entre eux par
interpolation.
périe
ure d
e Mé
caniq
y (t ) est-elle périodique au sens mathématique ? Comment expliquer « l’amortissement » des oscillations ? Confirmer cette explication avec la courbe 3 où l’objet
oscille dans l’eau au lieu de l’air.
L’écart entre deux zéros ou deux maximums de y (t ) peut-il être considéré comme
constant ? Cette durée, que l’on retrouve entre divers points (maximums, minimums,
zéros non consécutifs) est appelée pseudo-période et est notée (abusivement) T .
Comment interpréter l’existence de T pour cet oscillateur ?
Proposer une modélisation expérimentale de l’oscillateur.
4. On adopte la modélisation y (t ) = A cos(ω 0 t + ϕ ) . Comment s’appellent A , ω0 ,
e Na
Écol
tiona
le Su
ω0t + ϕ et ϕ ? Quelle est la relation entre la période T et ω 0 ? En cohérence avec
&KDSLWUH
6925
2836
4
l’étude expérimentale les valeurs des constantes A et ϕ dépendent des conditions
initiales, alors que ω 0 n’en dépend pas, c’est une caractéristique de l’oscillateur.
Calculer A et ϕ pour y (0) = Ym et y (0) = 0 . Décrire le lancement de l’oscillateur
avec ces conditions initiales.
.65.1
55.1
59:1
5. Pour le modèle y (t ) = A cos(ω 0 t + ϕ ) , y = v y est la vitesse suivant Oy , dérivée de
y par rapport à t , y est la dérivée de y par rapport à t , appelée dérivée seconde
de y par rapport à t . Établir la relation entre y et y , comment s’appelle ce type
d’équation ?
Une étude théorique de l’oscillateur harmonique est faite questions 19. et 40. du
chapitre 6.
2320
:196
6. On considère deux fonctions harmoniques synchrones, c’est-à-dire de même
pulsation : u1 (t ) = U m1 cos (ω t + ϕ1 ) et u2 (t ) = U m 2 cos (ω t + ϕ2 ) . Définir et étudier
l’avance de phase de u2 (t ) sur u1 (t ) .
8891
3URSDJDWLRQG·XQVLJQDO
:211
0753
582:
7. Comment définir un signal mécanique ? Citer des exemples de signaux mécaniques
qui se propagent. Quelle propriété du milieu permet à un signal mécanique de se
propager ? Quelle est la différence entre un signal mécanique transversal et un
signal longitudinal ? Donner des exemples.
techn
iques
8. Qu’est-ce qu’une onde progressive ? Définir la célérité d’un signal ou d’une onde
progressive. Quels sont les ordres de grandeur des célérités : d’une onde à la surface
de l’eau, d’une déformation transversale le long d’une corde tendue, d’un signal
sonore ?
Micro
9. Qu’est-ce qui distingue les signaux électromagnétiques (ondes radio, lumière…) des
signaux mécaniques décrits ci-dessus ?
ure d
e Mé
caniq
ue e
t des
10. On considère une déformation spatiale sinusoïdale, de période λ ,
y ( x) = A cos (k x + ψ ) . Quelle est l’unité de k ? Quelle est la relation entre k et
λ ? Il peut s’agir par exemple d’une modélisation de la surface d’un plan d’eau
perturbé par la chute d’un objet et vu en coupe à une date fixée (comme une
photographie). En s’aidant de la question 1., indiquer ce qui arrive au graphe de
y ( x) si ψ augmente au cours du temps, puis s’il diminue. Comment devrait varier
ψ avec le temps t pour que le déplacement se fasse à vitesse constante ?
Quelle fonction de deux variables traduit la propagation d’un signal, suivant Ox, au
cours du temps ?
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
périe
11. On peut réciproquement étudier la fonction de deux variables y ( x, t ) avec le petit
programme Python ci-dessous, attention à bien respecter l’indentation, les numéros
sont les numéros de ligne :
8891
2320
:196
.65.1
55.1
59:1
6925
2836
4
ɨ Ƌ
ɩ Ŝ
ɪ
ɫ ɬ ʰŜſƀ
ɭ ŜſƃɥřɩřŞɨŜɨřɨŜɨƄƀ
ɮ ɯ ʰ ſɥřɩřɪɥɥƀ
ɰ ɨɥ ʰɨ
ɨɨ ʰɥŜɬ
ɨɩ ɨɪ Ŝſř ſɩƋƋŵƀř ʰɐɐƀ
ɨɫ ɨɬ ſƀś
ɨɭ ʰƋɨɥƋƋſŞɪƀ
ɨɮ ʰ ſɩƋƋŵŞɩƋƋŵƀ
ɨɯ Ŝſřř ʰɐɐƀ
ɨɰ ɩɥ ʰŜ ſřřʰɯɥɥřʰɨɥř
ʰřʰ ƀ
ɩɨ ɩɩ Ŝſƀ
0753
582:
À quelle ligne est imposé le sens de propagation ? Comment le modifier ? Quel
paramètre modifie la vitesse de propagation ?
Micro
techn
iques
:211
12. On note u ( x, t ) un signal qui se propage, par exemple le long d’une corde, avec la
G
vitesse c , et Ox l’axe qui porte la corde au repos et on impose au point O d’abscisse
x = 0 : u ( x = 0, t ) = f (t ) . L’axe Ox est orienté dans le sens de propagation donné
G
par c , exprimer u ( x, t ) , en un point d’abscisse x quelconque, avec la fonction f.
Pour le même signal généré par la même excitation u ( x = 0, t ) = f (t ) , exprimer
u ( x, t ) si on oriente l’axe Ox dans le sens opposé au sens de propagation.
caniq
ue e
t des
13. On reprend la corde de la question 12. et on considère une déformation décrite, à la
G
date t = 0 , par u ( x, t = 0) = g ( x ) et qui se propage à la vitesse c . Exprimer u ( x, t )
avec la fonction g, dans le cas d’une orientation de l’axe Ox dans le sens de
propagation, puis dans le cas de l’axe Ox orienté dans le sens opposé au sens de
propagation.
périe
ure d
e Mé
14. Qu’appelle-t-on fréquence d’un signal sonore ? À quelle sensation physiologique
est-elle associée ? Quelles sont les limites des fréquences audibles par l’oreille
humaine ? Quelle est la fréquence du La du diapason ? Quelle est la gamme de
fréquences de la parole ? Comment est définie l’octave ? Qu’est-ce qui différencie la
même note jouée par deux instruments différents ?
e Na
Écol
tiona
le Su
15. Soient deux signaux de même nature, se propageant en sens inverses le long d’une
même direction. En quoi consiste le principe de superposition ?
&KDSLWUH
16. Pour un signal transversal se propageant le long d’une corde, donner, en le justifiant,
la forme du signal réfléchi, dans le cas d’une extrémité fixe, puis dans le cas d’une
extrémité libre.
6925
2836
4
17. Donner des exemples de propagation qui ne se fait pas dans une seule direction.
On appelle surface d’onde l’ensemble des points atteints à une même date par un
signal émis par la source. Comment vibrent les points d’une même surface d’onde ?
Quelle est la forme des surfaces d’onde loin d’une source ponctuelle ?
59:1
2QGHVVWDWLRQQDLUHV
2320
:196
.65.1
55.1
18. Étude théorique de la superposition de deux ondes sinusoïdales progressives, de
même amplitude et même pulsation, se propageant en sens opposés avec la même
célérité. Il peut s’agir d’un modèle pour la superposition d’une onde incidente et
d’une onde réfléchie (avec amortissement faible).
Avec Ox la direction de propagation :
u 1 ( x, t ) = a cos [ω (t − x / c) ] et u 2 ( x, t ) = a cos [ω ( t + x / c) + ϕ ]
0753
582:
8891
Que représente ϕ ? Montrer qu’il existe au moins un point de l’axe où u1 et u2
vibrent en phase. Choisir ce point comme origine et déterminer l’onde résultante
u ( x, t ) . Pourquoi parle-t-on d’onde stationnaire ? En donner les caractéristiques
(position des nœuds et des ventres).
Quel problème va se poser pour la vérification expérimentale de cette étude ?
ue e
t des
Micro
techn
iques
:211
19. Une corde de Melde de longueur finie l est S
x
A
excitée en S par un vibreur (non représenté)
de faible amplitude et de fréquence f
variable, elle passe en A sur la gorge d’une
poulie. Elle est tendue par une masse m
accrochée à l’extrémité de la corde. Décrire
le phénomène observé lorsqu’on modifie la fréquence d’excitation f à longueur et
tension constantes. Qu’est-ce qui justifie l’interprétation en termes d’ondes
stationnaires. Comment comprendre que le point S du vibreur soit quasiment un
nœud de vibration ? Exprimer la longueur l en fonction de la longueur d’onde λ n
caniq
du mode n concerné et en déduire les fréquences des modes propres en fonction de
n , l et c . Représenter la corde dans le mode n = 3 . Comment mettre en évidence
expérimentalement l’influence de la célérité ?
ure d
e Mé
20. Une corde de guitare de longueur l est fixée à ses deux extrémités ; le guitariste la
met en vibration avec son doigt. Quels sont les points communs et les différences
avec la corde de Melde ? Est-il possible de préciser dans quel mode elle vibre ? Quel
lien existe-t-il avec le spectre sonore émis par la corde ?
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
périe
21. Une onde sonore émise par une source ponctuelle lointaine se réfléchit sur un plan
rigide. Positionner les nœuds et les ventres de vibration, en déduire les nœuds et
ventres de surpression.
6925
2836
4
22. Quels sont les modes possibles de vibration d’un tuyau sonore ouvert aux deux
extrémités ? Ceux d’un tuyau avec une extrémité fermée ? Préciser les conséquences
sur les harmoniques potentiellement présents. Donner des exemples d’instruments
de musique correspondants à ces deux cas.
,QWHUIpUHQFHVHQWUHGHX[RQGHVPpFDQLTXHV
.65.1
55.1
59:1
23. Une fourche à deux extrémités vibre en frappant la surface de l’eau d’une cuve à
onde en deux points S1 et S2 ; les vibrations produites en un point M de la surface
par ces deux sources s’écrivent respectivement u 1 ( M , t ) et u 2 ( M , t ) . À quelle
condition deux ondes de même nature peuvent-elle interférer ? Décrire précisément
le phénomène observé à l’aide d’une figure même sommaire.
8891
2320
:196
24. Les deux points sources S1 et S2 ont pour mouvement des oscillations sinusoïdales
de même amplitude, de même fréquence et sont en phase :
u 1 ( S1 , t ) = u 2 ( S2 , t ) = a cos(ω t )
Pourquoi les signaux arrivant en M sont-ils déphasés ? Exprimer l’avance de phase
de u2 sur u1 en fonction des distances S1M et S 2 M .
0753
582:
(MPSI) Comment utiliser la représentation de Fresnel pour déterminer l’amplitude
de l’onde résultante en M ?
:211
(PTSI) En considérant que les ondes u1 et u2 ont la même amplitude en M
(amortissement négligeable) déterminer l’amplitude de l’onde résultante en M .
techn
iques
25. Quelle sont les conditions d’interférences constructives ou destructives en M ?
Interpréter les conditions obtenues à l’aide d’un schéma.
Micro
'LIIUDFWLRQjO·LQILQL
caniq
ue e
t des
26. De manière générale quand dit-on qu’il y a diffraction ?
Une fente fine de TP de hauteur b ≈ 2 cm , de largeur a ≈ 0,1 mm est éclairée sous
incidence nulle par un faisceau lumineux de longueur d’onde λ ≈ 0,5 ȝm . Faire un
dessin et expliquer le phénomène observé. Dans quelle direction angulaire θ 0 est
essentiellement envoyée la lumière ? Quelle est alors la largeur de la tache de
diffraction sur un écran placé à une distance D = 1 m du plan de la fente ?
e Na
Écol
tiona
le Su
périe
ure d
e Mé
27. On reprend l’expérience avec une ouverture circulaire de diamètre d ; qu’observe-ton ? Dans quelle direction angulaire θ 0 est essentiellement envoyée la lumière ?
Quelle est l’importance pratique des ouvertures circulaires ?
&KDSLWUH
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
6925
2836
4
Les grandeurs u ( x, t ) qui représentent les phénomènes ondulatoires sont
Les
grandeurs u (;x,ilt )convient
qui représentent
les faire
phénomènes
ondulatoires
spatio-temporelles
donc de bien
la distinction
entre u ( xsont
0 , t)
spatio-temporelles
;
il
convient
donc
de
bien
faire
la
distinction
entre
u
(
x
qui, pour une corde vibrante par exemple, représente l’élongation d’un point0 , xt )0
qui,
uneencorde
vibrante
par exemple,
l’élongation
x0
de lapour
corde
fonction
du temps
et u ( x,représente
t ) qui représente
l’étatd’un
de point
la corde
0
2320
:196
.65.1
55.1
59:1
de la corde
en fonction
du(comme
temps et
x, t0 ) qui représente l’état de la corde
entière
à un instant
t0 fixé
uneu (photographie).
entière à un instant t0 fixé (comme une photographie).
Dans l’écriture u( x, t ) = f (t − x / c ) d’une onde progressive, bien distinguer
Dans
u( x, t )la= grandeur
f (t − x / cphysique
) d’une onde
progressive,
bien distinguer
u ( x, t )l’écriture
qui représente
(élongation,
surpression,…)
de f
u (fonction
x, t ) qui analytique
représente (sinus,
la grandeur
physique (élongation,
surpression,…)
la
exponentielle,…)
qui représente
sa variation.de f
la fonction analytique (sinus, exponentielle,…) qui représente sa variation.
Toutes les célérités sont notées c ; une erreur d’étourderie classique consiste à
−1
confondre
Toutes les célérités
notées c ;numériques
une erreur d’étourderie
consiste
c = 340 m.sclassique
pour les
ondesà
dans lessont
applications
−1
8
−1
c
=
340
m.s
pour
les
ondes
confondre
dans
les
applications
numériques
acoustiques avec c = 3.10 m.s pour les ondes électromagnétiques.
acoustiques avec c = 3.108 m.s −1 pour les ondes électromagnétiques.
e Na
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
Ne pas confondre la célérité des ondes ( c = T / μ par exemple sur une corde)
avec
Ne pas
confondre
la céléritéd’un
des élément
ondes ( cde
= corde.
T / μ par exemple sur une corde)
la vitesse
de vibration
avec la vitesse de vibration d’un élément de corde.
Dans les applications numériques il ne faut pas oublier le coefficient 2π
−1
Dans
les applications
numériques
oublier
le coefficient
2π
ω = 2πilf ne
(enfaut
rad.spas
) et
la fréquence
f (en Hz).
intervenant
entre la pulsation
−1
intervenant entre la pulsation ω = 2π f (en rad.s ) et la fréquence f (en Hz).
La caractéristique essentielle d’une onde est sa fréquence (liée à la pulsation
par caractéristique
ω = 2π f ) ; elleessentielle
est conservée
l’onde
passe d’un(liée
milieu
un autre.
La
d’unelorsque
onde est
sa fréquence
à laà pulsation
par
ω
=
2
π
f
)
;
elle
est
conservée
lorsque
l’onde
passe
d’un
milieu
à
c /autre.
f et
En revanche, comme la célérité c change, il en est de même de λ =un
En revanche,
comme
la célérité
c change,
il enà est
de même
λ = c / f que
et
λ change
d’un milieu
l’autre.
En sede
souvenant
donc
la longueur
d’onde
λ estlalalongueur
distanced’onde
parcourue
par l’onde
pendant
une période
T , il apparaît
λ change
d’un milieu
à l’autre.
En se souvenant
que
donc
clairement
que λ augmente
.
λ est la distance
parcourueavec
par cl’onde
pendant une période T , il apparaît
clairement que λ augmente avec c .
Le choix entre onde progressive et onde stationnaire est imposé par l’existence
ou choix
non deentre
conditions
aux limites.et En
espace
« illimité
prendre
solution
Le
onde progressive
onde
stationnaire
est»,imposé
parune
l’existence
en non
ondedeprogressive
; enlimites.
espaceEn« espace
clos », «prendre
uneprendre
solution
onde
ou
conditions aux
illimité »,
une en
solution
stationnaire,
soit directement
sous la« forme
mode,une
soitsolution
par superposition
en
onde progressive
; en espace
clos »,d’un
prendre
en onde
de deux ondes
progressives
senslaopposé,
l’onde
retoursoit
étant
par
parengendrée
superposition
stationnaire,
soit
directementensous
forme d’un
mode,
réflexion
de l’onde
aller sur l’obstacle.
de
deux ondes
progressives
en sens opposé, l’onde retour étant engendrée par
réflexion de l’onde aller sur l’obstacle.
Les ondes stationnaires, en espace confiné, conduisent, par les conditions aux
limites
(auxstationnaires,
deux extrémités),
à des confiné,
« quantifications
» dupar
genre
sin(ω l / c ) =
0
Les
ondes
en espace
conduisent,
les conditions
aux
limites
(aux
deux
extrémités),
à
des
«
quantifications
»
du
genre
sin(
ω
l
/
c
)
=
0
ω l / c = nπ . Dans cette écriture il est important d’indicer la quantité
ω l / c par
= nπexemple
. Dans en
cette
écriture
quantité
discrétisée,
écrivant
/ l afin de d’indicer
ωn il= nest
π c important
bien faire la
apparaître,
discrétisée,
exemple
enωécrivant
ωn = nπ c / l afin de bien faire apparaître,
lorsque l estpar
fixée,
la suite
n de valeurs possibles pour ω .
lorsque l est fixée, la suite ωn de valeurs possibles pour ω .
Dans un instrument de musique qui permet de jouer plusieurs notes, il faut bien
distinguer les fréquences fondamentales pour chaque note de type f ( p ) et les
6925
2836
4
harmoniques éventuels pour chaque note de type f n = n f ( p ) ).
2320
:196
.65.1
55.1
59:1
Il est faux de croire que la diffraction (par une fente de largeur a par exemple)
n’est observable qu’à partir du moment où la taille de l’objet diffractant est de
l’ordre de la longueur d’onde ! (voir les questions 26. et 67. pour les
applications numériques prouvant le contraire) ; d’ailleurs à ce moment-là
sin θ 0 = λ / a serait voisin et même supérieur à 1 ! (et d’un point de vue
purement expérimental, la quantité de lumière qui traverse une fente aussi
« régulièrement » étroite n’est plus visible à l’œil tellement elle est faible…)
8891
$SSOLFDWLRQVGLUHFWHVGXFRXUV
582:
/·RVFLOODWHXUKDUPRQLTXH
techn
iques
:211
0753
28. Pour un système masse-ressort le déplacement de la masse est décrit par :
x(t ) = a cos(ω 0 t + ϕ ) .
Déterminer les « constantes d’intégration » dans le cas où la masse est lancée avec
une vitesse initiale v0 à partir de la position x = 0 .
La durée mesurée de 10 oscillations est τ = 4, 4 s , quelle est la pulsation propre du
système ?
e Mé
caniq
ue e
t des
Micro
­u1 = A cos (ω t )
29. ®
Quelle est l’avance de phase de u 2 (t ) sur u1 (t ) ?
¯u 2 = B cos (ω t + π 3)
­u1 = A cos (ω t + π 4)
Quelle est l’avance de phase de u 2 (t ) sur u1 (t ) ?
®
¯u 2 = B cos (ω t )
­u1 = A cos (ω t − π 3)
Quel est le retard de phase de u 2 (t ) sur u1 (t ) ?
®
¯u 2 = B cos (ω t + π 3)
­u1 = A cos (2ω t + π 2)
Quel est le retard de phase de u 2 (t ) sur u1 (t ) ?
®
¯u 2 = B cos (ω t + π 2)
e Na
Écol
tiona
le Su
périe
ure d
30. Sur le schéma de type oscillogramme ci-dessous, les amplifications verticales sont
de 1,0 V/div. ; la base de temps de 20 ms/div. Les voies 1 et 2 sont indiquées sur les
courbes.
Quelle est l’avance de phase de 2 sur 1 ?
&KDSLWUH
2
.65.1
55.1
59:1
6925
2836
4
1
:211
0753
2320
582:
8891
31. La vitesse de propagation sur une corde tendue
y S1 cm
entre deux points S1 et S 2 , est c = 10, 0 m.s −1 . La
variation de l’élongation du point S1 au cours du
2
temps est représentée ci-contre.
Représenter, en supposant l’amortissement négli- 1
geable et une propagation vers les x croissants,
l’aspect de la corde aux dates suivantes : 0, 010 s ;
0, 020 s ; 0, 030 s ; 0, 040 s .
10
0
:196
3URSDJDWLRQ
t
20
30
ms
ue e
t des
Micro
techn
iques
32. L’oreille humaine entend des sons depuis 20 Hz jusqu’à 20 kHz environ. Combien
cela représente-t-il d’octaves ? Donner dans l’air les longueurs d’onde correspondantes ainsi que celle de la fréquence 1 kHz .
À quelles perceptions physiologiques correspondent la fréquence et l’amplitude
d’un son ? Un violoncelle et une clarinette jouent la même note avec la même
intensité ; quelles caractéristiques du son permettent de distinguer les deux
instruments ?
33. Pourquoi un professeur parlant devant sa classe peut être entendu par tous ses
élèves, aussi bien ceux qui sont devant lui que ceux qui sont situés latéralement.
e Mé
caniq
34. De quel type d’ondes est-il question lorsque l’on modélise un solide par une chaîne
d’atomes reliés par des ressorts ? Quel est l’ordre de grandeur de la célérité de ces
ondes ?
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
périe
ure d
35. Avec un raisonnement qualitatif, décrire ce qui se produit pour un signal arrivant à
la séparation entre deux milieux d’inerties différentes, par exemple deux cordes, de
masses linéiques différentes, attachées l’une à l’autre ( μ2 > μ1 ). S’aider des
questions 8. et 16., et considérer notamment la réflexion et la transmission du signal.
μ2
A
μ1
x
6925
2836
4
36. Estimer en minutes d’arc la divergence d’un faisceau laser, d’environ 1 mm de
diamètre, liée à la diffraction (l’angle d’ouverture que fait le faisceau par rapport à
son axe) ; commentaires. Quelle est la taille de ce faisceau, de 1 mm de diamètre au
départ de la Terre, lorsqu’il arrive sur la Lune distante de 3,8.10 5 km ?
37. En optique, la diffraction des objets de taille macroscopique (lentille, prisme,…) estelle visible ? Quelle théorie s’applique alors parfaitement ?
59:1
2QGHVVWDWLRQQDLUHV
:196
.65.1
55.1
38. Une corde tendue est attachée à ses deux extrémités en O ( x = 0 ) et en A ( x = l ) ;
son mouvement est donné par y ( x , t ) = b sin(ω x / c ).sin(ω t ) .
De quel type de solution s’agit-il ? Cette solution vérifie-t-elle les conditions aux
limites ? Déterminer les pulsations propres ωn possibles.
8891
2320
La corde est en acier de masse volumique ρ = 7,87.103 kg.m −3 , de diamètre
d = 0,30 mm , de longueur l = 64 cm et tendue avec une tension T = 100 N .
Calculer la célérité c (la formule est donnée à la question 8.), la fréquence f1 du
0753
582:
mode fondamental et la longueur d’onde λ 1 correspondante. Faire un schéma de ce
mode d’oscillations et interpréter.
Pourquoi un violon joue-t-il plus aigu qu’une contrebasse ?
iques
:211
39. Un four à micro-ondes fonctionne à la fréquence f = 2, 45 GHz ; quelle est la
longueur d’onde de ces ondes électromagnétiques ? La comparer à la taille du four ;
est-il possible qu’il s’installe un système d’ondes stationnaires ?
caniq
ue e
t des
Micro
techn
40. Un instrument à vent peut être considéré comme un tuyau sonore de longueur L . Il
se comporte donc pour certaines fréquences comme un résonateur siège d’un
système d’ondes stationnaires de longueur d’onde λ . Ces fréquences sont les modes
propres de l’instrument et correspondent aux notes qu’il est capable de générer.
a) La flûte traversière est un instrument considéré comme ouvert à ses deux
extrémités. Faire une représentation symbolique de l’onde stationnaire dans le
tuyau sonore correspondant à la note fondamentale, la note la plus basse générée
par l’instrument.
AN : Déterminer la longueur de l’instrument pour que son fondamental soit la
note Mi de fréquence f1 fl = 330 Hz ; prendre pour la vitesse du son dans
e Mé
l’air c = 340 m.s −1 .
e Na
Écol
tiona
le Su
périe
ure d
Exprimer f1 fl en fonction de c et L .
b) L’anche d’une clarinette est assimilée à une extrémité fermée. Refaire un dessin
de l’onde stationnaire dans le tuyau sonore correspondant à la note fondamentale,
c’est-à-dire de plus grande longueur d’onde.
La clarinette a une longueur L sensiblement identique à celle de la flûte
traversière. En déduire la fréquence f1cl du fondamental de la clarinette ; quel est
le plus grave des deux instruments ?
&KDSLWUH
6925
2836
4
Dans « Pierre et le loup », lequel des instruments Prokofiev a-t-il choisi pour
représenter l’oiseau ? le chat ?
c) Montrer que les fréquences des harmoniques sont régulièrement espacées et que
l’écart Δf entre deux harmoniques successifs est le même pour la flûte
traversière et la clarinette ; quel est cet écart ?
55.1
59:1
41. Une corde, de longueur L = 160 cm et fixée aux deux extrémités, présente deux
résonances successives aux fréquences de 85 Hz et 102 Hz. Quelle est la fréquence
fondamentale de la corde ? Quelle est la longueur d’un fuseau pour la résonance à
85 Hz ? Quelle est la vitesse des ondes sur la corde ?
.65.1
42. Un tuyau sonore émet dans l’air deux harmoniques successifs à 240 Hz et 280 Hz.
Le tuyau est-il ouvert ou fermé ? Quelle est sa longueur ? On prend c = 340 m.s −1 .
:196
,QWHUIpUHQFHV
8891
2320
43. Dans le dispositif de la question 23., la médiatrice du segment [ S1S2 ] correspondelle à une frange « claire » (maximum d’amplitude) ou à une frange « sombre » ?
On note O le milieu de [ S1S2 ] , où se trouvent, par rapport à O, les points d’ampli-
0753
582:
tude maximale sur le segment [ S1S2 ] ? Interpréter la distance entre deux maximums.
techn
iques
:211
44. Champ d’interférence
On reprend le dispositif de la question 23. Sur une feuille, format portrait, placer au
centre S1 et S2 espacés de 7 cm. Tracer des cercles centrés sur S1 et de rayons
correspondants à un nombre entier de λ , avec λ = 1,5 cm . Faire de même pour
l’onde issue de S2 . Placer entre S1 et S2 les points d’amplitude maximale. Repérer
enfin aux croisements des ondes issues de S1 et S2 les points tels que
ue e
t des
Micro
S1M − S2 M = d1 − d 2 = 0 , d1 − d 2 = λ , d1 − d 2 = 2λ , etc.…
En déduire les franges d’amplitude maximale.
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
e Mé
caniq
45. Lorsque l’alimentation du moteur d’une machine-outil lancée à grande vitesse de
rotation est coupée, on constate que pendant la phase de décélération le son émis est
de moins en moins aigu ; expliquer.
périe
ure d
46. Quelle est la vitesse du son dans l’air à 20° C ? (la donner d’abord en m.s-1 puis en
km.h-1). Un jour d’orage un observateur entend le tonnerre 3 s après avoir vu
l’éclair ; qu’en déduit-il ?
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
47. Quelle est la célérité des ondes sonores dans l’eau ? Comparer la longueur d’onde
du La du diapason dans l’air (toujours à 20 °C ) et dans l’eau.
Pourquoi est-il difficile de localiser l’origine d’un son lorsque l’on a la tête sous
l’eau (en plongée par exemple) ?
6925
2836
4
48. Sachant que la vitesse de la houle à la surface de l’eau augmente si la profondeur
diminue, comment peut-on expliquer le déferlement d’une vague sur la plage ?
49. Pourquoi les Amérindiens collaient-ils leur oreille sur les rails pour détecter
l’arrivée d’un train ?
50. L’onde représentée sur le graphe u ( x, t0 ) cicontre représente-t-elle une onde progressive ou
une onde stationnaire ? Justifier soigneusement la
réponse.
x
:196
.65.1
55.1
59:1
u ( x , t0 )
2320
51. Une corde, fixée à ses deux extrémités, est pincée en son centre, en x = l / 2 , puis
lâchée. Que peut-on prévoir pour son spectre d’émission ?
0753
582:
8891
52. On peut utiliser pour cette expérience, un tuyau en PVC ouvert aux deux extrémités,
de diamètre 4 cm et de longueur une cinquantaine de centimètres. Si on frappe sur
une extrémité avec la paume de la main qu’on laisse ensuite en contact avec le
tuyau, on entend un son plus grave que si on frappe avec deux doigts qu’on enlève
immédiatement. Comment peut-on l’expliquer ?
techn
iques
:211
53. Un diapason résonne autour de la fréquence f 0 = 440 Hz en émettant un signal
assez faible. Pour le faire « mieux sonner », on le fixe sur une cavité de type tuyau
sonore (ouvert d’un côté, fermé de l’autre) ; expliquer pourquoi. Quelle est la taille
optimale de la cavité ?
Micro
54. Quelle est la fréquence de résonance de la colonne d’air, longue d’environ 2,5 cm,
dans le conduit de l’oreille externe ? Conclure.
caniq
ue e
t des
55. Sur un disque compact, le signal sonore (à l’origine analogique) est stocké de
manière numérique (« digital » en anglais) avec des états que l’on peut désigner par
« 0 » ou « 1 » comme en informatique. À quelle fréquence est échantillonné un
disque compact pour couvrir l’ensemble du spectre sonore humain ?
ure d
e Mé
56. Préciser le domaine des ultrasons, en fréquence et en longueur d’onde dans l’air.
Citer des espèces animales capables de détecter et / ou d’émettre des ultrasons.
Même question pour les infrasons.
périe
57. Quel temps s’écoule-t-il entre le moment où se produit une éruption solaire et le
moment où elle est observable sur la Terre ?
e Na
Écol
tiona
le Su
58. La longueur d’onde de la diode laser utilisée dans un lecteur de CD ou dans une
imprimante laser se situe dans la fourchette de 770 à 810 nm ; à quelle « couleur »
cela correspond-il ?
&KDSLWUH
Quel est l’avantage des diodes bleues utilisées dans les blu-ray sur les diodes rouges
pour la lecture d’informations contenues sur des DVD ?
6925
2836
4
59. Citer des cas d’observation courante de la diffraction de la lumière. Et pour d’autres
types d’ondes ?
59:1
60. Lorsqu’une porte est entrebâillée, le bruit extérieur s’entend presque autant que si la
porte était ouverte. Pourquoi ? Au fur et à mesure que la porte se ferme, le son
devient plus aigu, pourquoi ?
.65.1
55.1
61. Inscrire une ouverture circulaire de diamètre d entre deux ouvertures carrées, l’une
extérieure juste plus grande, l’autre intérieure juste plus petite, et comparer la
largeur des taches de diffraction pour les trois ouvertures.
8891
2320
:196
62. La téléphonie 4G des smartphones fonctionne à 2, 60 GHz ; à quelle longueur
d’onde cela correspond-il ?
Pourquoi la gamme des 2, 40 GHz correspondant aux WiFi et Bluetooth conduitelle à des inquiétudes ? (revoir la question 39. sur le four à micro-ondes).
582:
([HUFLFHV
techn
iques
:211
0753
63. Réflexion et transmission
La vitesse de propagation sur une corde tendue est c = 10, 0 m.s −1 . On considère que
l’amortissement est négligeable pendant la propagation. L’extrémité A de la corde
peut être libre ou fixée rigidement, tandis que de l’autre côté (avant le point O) la
corde est considérée comme infinie. L’abscisse du point O est x = 0 et la distance
OA est de 6,0 cm. Les graphes sont à l’échelle et peuvent servir pour obtenir les
valeurs des grandeurs non précisées dans l’énoncé.
A
Micro
O
x
ue e
t des
a) L’extrémité A est libre (ce qui n’empêche pas une réflexion !) et la variation de
l’élongation du point O au cours du temps est représentée ci-dessous.
caniq
u ( x = 0, t )
cm
2
3
4
5
6
périe
1
ure d
e Mé
1
t
7
8
9
ms
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
Représenter l’aspect de la corde, entre O et A, aux dates suivantes : 6, 0 ms ;
9, 0 ms ; 10, 0 ms et 12, 0 ms .
6925
2836
4
b) L’extrémité A est fixée et le point O est maintenant animé, à partir de la date
t = 0 , d’un mouvement sinusoïdal d’amplitude 1, 0 cm et de période 2, 0 ms . Le
point B est au milieu du segment OA. Représenter sur un même graphe, l’allure
de la corde entre B et A, à diverses dates entre t1 = 9, 0 ms et t2 = 11, 0 ms . Ne
pas faire de construction point par point mais justifier clairement l’allure de la
corde et porter sur le graphe toutes les indications utiles.
c) Le point A est maintenant le point de jonction entre deux cordes, de même
tension et de masse linéique μ1 , pour la partie à gauche de A (la corde précédente
59:1
avec c1 = 10, 0 m.s −1 ), et μ2 = 4 μ1 pour la partie à droite de A. On rappelle que la
55.1
F
célérité est c =
8891
2320
:196
.65.1
μ . Le signal incident donne naissance à un signal réfléchi et à
un signal transmis. Le rapport en A de l’élongation du signal réfléchi sur
l’élongation du signal incident est égal en valeur absolue à 1 3 . Le rapport en A
de l’élongation du signal transmis sur l’élongation du signal incident est égal en
valeur absolue à 2 3 . L’allure des cordes à la date t = 0 est donnée ci-dessous :
582:
u ( x, t = 0)
cm
:211
0753
1
1
2
3
5
4
6
7
iques
A
O
8
x
9
cm
techn
Représenter l’allure de ces mêmes cordes à la date t3 = 7, 0 ms .
frette
caniq
cordes
clefs
sillet
e Na
Écol
tiona
le Su
périe
ure d
e Mé
chevalet
ue e
t des
Micro
64. Cordes de guitare
Une guitare comporte 6 cordes de masses linéiques différentes. Chaque corde est
montée entre le chevalet et le sillet, elle est reliée à une clé permettant de modifier
légèrement sa tension. La distance (chevalet-sillet) est L = 642 mm .
&KDSLWUH
1
2
3
4
5
6
59:1
corde de sol
82,4
110,0 146,8 196,0 246,9 329,5
Mi
La
Ré
Sol
55.1
Corde
Fréquence
fondamentale
(Hz)
Note
6925
2836
4
touche
Si
Mi
.65.1
frette
F
μ .
8891
c=
2320
:196
1) Les tensions des cordes sont sensiblement les mêmes. Pourquoi ont-elles des
masses linéiques différentes ? Comparer les masses linéiques des corde 1 et 2.
Quel est l’intérêt pratique de masses linéiques différentes ? On rappelle que
582:
2) Quel est l’utilité des frettes ?
techn
iques
:211
0753
3) On veut accorder la corde 2. On pince cette corde et on enregistre le son émis à
l’aide d’un micro et d’un oscilloscope. On obtient l’enregistrement ci-dessous :
a) Le son émis est-il harmonique ?
b) En admettant que le fondamental soit
présent, quelle pourrait-être sa fréquence ?
c) La corde est-elle bien accordée ?
d) Sur quel paramètre jouer pour réaliser
l’accord ?
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
4) Une fois accordée, la corde émet un La1.
La corde 6 lorsqu’on appuie sur la 5ème
touche (espace entre frettes) émet un La3
de fréquence 440 Hz. On réalise l’analyse
spectrale des sons émis par ces deux
cordes.
a) Identifier les deux cordes sur les
spectres ci-dessous
b) Quels harmoniques sont absents du son émis par la corde 2 ? Comment peut-on
l’expliquer ?
6925
2836
4
59:1
55.1
.65.1
:196
8891
2320
5) Le fait d’effleurer la corde, sans la presser complètement, permet de la laisser
vibrer sur toute sa longueur tout en imposant un nœud de vibration à l’endroit où
on pose le doigt. On réalise un enregistrement et une analyse spectrale pour la
corde de Mi1 attaquée près du chevalet. Faire l’analyse temporelle et spectrale.
Commenter.
amplitude
6
4
2
8
12
10
14
temps
16
(ms)
2
0
0, 4
0, 6
0,8
caniq
0, 2
ue e
t des
Micro
4
techn
iques
:211
0753
582:
amplitude
1, 0
fréquence
(kHz)
e Na
Écol
tiona
le Su
périe
ure d
e Mé
65. Flûte à bec
Une flûte à bec est constituée d’un embout (dans lequel le musicien souffle) et d’un
résonateur appelé perce (tuyau sonore). La flûte est ouverte à son extrémité passive,
ainsi qu’à l’extrémité active, le biseau, juste après l’embout. Lorsque le musicien
souffle dans l’embout, il crée une excitation de la colonne d’air au niveau du biseau.
On considère donc un tuyau sonore ouvert aux deux extrémités, de longueur L. Le
corps de la flûte est percé de trous qui permettent de créer, à l’endroit où ils sont
ouverts, l’équivalent d’une extrémité ouverte (nœud de pression acoustique) et donc
de modifier la longueur de tuyau utile.
&KDSLWUH
Trous
Extrémité Biseau
Extrémité
passive
6925
2836
4
active
Résonateur
Embout
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
55.1
59:1
1) On donne ci-dessous l’enregistrement du son émis par la flûte, lorsque tous les
trous sont bouchés, il s’agit d’un do (fondamental à 523 Hz), ainsi que l’analyse
spectrale de ce son.
ue e
t des
Micro
Expliquer pourquoi le spectre des fréquences confirme que le tuyau sonore est
ouvert aux deux extrémités.
2) En prenant une vitesse du son de l’ordre de 340 m.s −1 , quelle est la longueur du
tuyau équivalent au résonateur ?
Do#
Ré
Ré#
Mi
Fa
Fréquence
f (0)
f (1)
f ( 2)
f (3)
f ( 4)
f (5)
Fa#
Sol
Sol#
La
La#
Si
f (6)
f (7 )
f (8)
f (9)
f (10)
f (11)
e Mé
Do
ure d
Note
caniq
3) En musique la fréquence fondamentale définit le nom de la note jouée par
l’instrument. La gamme tempérée chromatique est constituée d’octaves. La
fréquence d’une note est doublée lorsque l’on passe d’une octave à la suivante.
Chaque octave rassemble douze notes, séparées par un demi-ton.
périe
Dans une octave, pour passer d’une note à la suivante (un demi-ton au-dessus) la
fréquence est toujours multipliée par le même facteur a.
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
a) Exprimer le facteur a sous la forme d’une puissance de 2.
b) Exprimer la fréquence f ( p ) en fonction de f (0) dans une octave donnée.
c) La fréquence du la3 (la pour l’octave 3) est 440 Hz, retrouver la valeur
théorique numérique de la fréquence du do4 .
6925
2836
4
4) Dans la gamme, de do majeur, il y a donc deux demi-tons entre do et ré, deux
demi-tons entre ré et mi, un demi-ton entre mi et fa, deux demi-tons entre fa et
sol, deux demi-tons entre sol et la, deux demi-tons entre la et si et un demi-ton
entre si et do. Où se trouvent les trous sur le corps de la flûte pour pouvoir jouer
les 7 notes de la gamme à partir du do à 523 Hz.
59:1
5) On veut jouer un sol, quels trous doit-on boucher ou laisser ouverts ?
55.1
6) La longueur du résonateur de la flûte en do précédente n’est que de 28,5 cm,
comment expliquer cette valeur ?
techn
Micro
L
M
• S2
(Δ)
ure d
e Mé
caniq
ue e
t des
67. Interférences sur une cuve à ondes
Un vibreur provoque en deux points, S1 et
S2 , des vibrations transversales sinusoïdales,
en phase et de pulsation ω , à la surface de
l’eau d’une cuve à ondes.
On dispose au fond de l’eau une couronne de
plexiglas, de largeur L, autour du point S2
(en grisé sur la figure).
S1 •
La profondeur d’eau étant plus petite audessus de cette plaque, la célérité de l’onde y
est réduite. On note c la célérité à la surface
de l’eau, pour la plus grande profondeur et c’
celle au-dessus de la plaque.
iques
:211
0753
582:
8891
2320
:196
.65.1
66. Ondes stationnaires sur une corde excitée (*)
Une corde de longueur finie (points d’abscisse x < l ) est attachée en x = l . L’onde
aller (ou incidente) est choisie sous la forme : ya ( x , t ) = A sin(ω (t − x / c ) + ϕ a ) .
a) Pourquoi doit-on prendre, a priori, l’onde retour (ou réfléchie) sous la forme
yr ( x , t ) = B sin(ω (t + x / c ) + ϕ r ) ?
b) Traduire la condition aux limites en x = l , en donnant, avec commentaire, la
nouvelle expression du déplacement total y ( x, t ) de la corde sous forme
p−q
p+q
factorisée. On donne sin p − sin q = 2 sin
cos
.
2
2
c) Préciser la position des nœuds et commenter.
d) En réalité l’excitation provient d’un vibreur placé à l’origine et qui impose
y (0, t ) = a cos ωt ; en déduire l’amplitude A( x ) de l’onde résultante.
Commentaire sur l’amplitude des ventres.
périe
a) Exprimer en fonction de ω , c, c’ et L, l’avance de phase en un point M de la
médiatrice ( Δ ) du segment ª¬S1 S 2 º¼ , de la vibration issue de S2 sur celle issue de
tiona
e Na
Écol
le Su
S1 .
&KDSLWUH
b) La médiatrice de ª¬S1 S 2 º¼ peut-elle être une frange sombre (amplitude minimale
de vibration) ?
:196
.65.1
55.1
59:1
6925
2836
4
68. Interférences sonores
Deux sources sonores ponctuelles, S1 et
x
S 2 , sont disposées à une distance
M
2a = 10 cm l’une de l’autre. Elles
S2
•
émettent des ondes sonores harmoniques
de même fréquence f = 20 kHz et en
2a
M0
phase. La vitesse du son dans l’air est
•
S1
c = 340 m.s −1 .
D
On déplace un micro de petite dimension
le long d’une droite Δ , parallèle à ª¬S1 S 2 º¼ , située à une distance D = 1, 0 m de
2320
ª¬S1 S 2 º¼ .
a) Montrer qu’il existe une position M 0 de M , placée juste en face de ª¬S1 S 2 º¼ où
0753
582:
8891
le signal reçu par le micro présente un maximum d’amplitude.
b) On déplace le micro le long de Δ , montrer qu’il existe une position M 1 de M où
le signal reçu par le micro présente un minimum d’amplitude.
c) On pose M 0 M = x , on considère que a D et on utilise l’approximation
suivante : (1 + ε ) ≈ 1 + αε si ε 1 . En utilisant la relation de Pythagore et les
α
iques
:211
2a x
.
D
d) Calculer M 0 M 1 en fonction de λ , a et D, faire l’application numérique. Décrire
approximations données, montrer que : S 1M − S 2 M ≈
techn
ce que l’on observe quand on déplace le micro de part et d’autre de M 0 .
ure d
e Mé
caniq
ue e
t des
Micro
69. Diffraction d’un laser par une fente, par un cheveu
Dans l’expérience simple (sans lentilles), un laser He-Ne ( λ = 632,8 nm ) est
envoyé sur une fente fine de largeur a .
a) Pour quelle valeur de a , la tache centrale de diffraction sur un écran placé à
D = 1,50 m de la fente vaut-elle 100 a , critère pour une diffraction importante et
bien visible ? Comparer alors a à λ .
b) Expliquer qualitativement pourquoi un cheveu et une fente donnent la même
figure de diffraction.
Un cheveu placé dans le même faisceau donne, toujours à D = 1,50 m , une tache
centrale de largeur Δx = 3,8 cm ; que peut-on en déduire ?
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
70. Flûte de Pan (*)
On pourra s’aider des questions 22. et 65.
périe
4XHVWLRQVRXYHUWHV
La flûte de Pan est un instrument à vent constitué d’un ensemble de tuyaux sonores
de longueurs différentes. Le plus souvent il s’agit de tuyaux ouverts à l’extrémité
supérieure (où le musicien souffle pour mettre l’air en vibration) et fermés à
l’extrémité inférieure.
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
55.1
59:1
6925
2836
4
Pourquoi dit-on que la flûte de Pan émet un son « sans redondance d’octave et riche
en quinte » ? On rappelle que la quinte est un écart entre deux notes de fréquences
respectives f 0 et 3 f 0 2 .
Si la gamme jouée est celle de do majeur, déduire de la photo ci-dessous le nom de
la note émise par le tuyau le plus long. Peut-on savoir à quelle octave elle
appartient ?
ure d
e Mé
caniq
ue e
t des
Micro
71. Fentes d’Young
On pourra s’aider des questions 68.
x
Plan médiateur des fentes
et 69. Un laser (lumière monoM
chromatique de longueur d’onde
S2
λ = 633 nm ) éclaire deux fentes
•
y
très fines (largeur L) distantes de 2a,
O
avec 2a L . On place un écran à 2a
O'
•
une distance D a ( D = 1, 20 m ),
S1
sur lequel on observe la lumière qui
D
a traversé les fentes. Le problème est
considéré comme invariant dans la direction des fentes si bien que l’observation est
faite dans le plan médiateur (plan Oxy) des fentes (voir figure).
S1 et S 2 désignent les points des fentes appartenant à ce plan et O le milieu de
e Na
Écol
tiona
le Su
périe
[ S 1 , S 2 ] . L’axe Oy est perpendiculaire au plan contenant les fentes, l’axe O’x se
trouve sur l’écran, perpendiculaire à Oy.
&KDSLWUH
On assimile les ondes lumineuses à des ondes sinusoïdales, circulaires dans le plan
d’étude. Les ondes émises sont en phase en S1 et S 2 .
Comment interpréter la présence de franges d’interférences sur l’écran ?
.65.1
55.1
59:1
6925
2836
4
À partir de la figure d’interférences reproduite ci-dessous, estimer la largeur L des
fentes et la distance 2a séparant les fentes.
:196
4 cm
techn
iques
:211
0753
582:
8891
2320
72. Gerris et Argus bleu
* Le gerris est un insecte que l’on peut observer sur les plans d’eau calmes de
certaines rivières. Très léger cet insecte évolue sur la surface en ramant avec ses
six pattes.
caniq
ue e
t des
Micro
Les déplacements de l’insecte déforment la surface de l’eau et y génèrent des
ondes qui se propagent dans toutes les directions offertes par le milieu, à partir du
point source O .
La surface de l’eau est photographiée à deux instants différents. Le document
suivant est à l’échelle 1/100e.
2 cm
e Mé
1 cm
t2 = t1+10 s
périe
ure d
t1
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
* L’argus bleu, un petit papillon tombé à l’eau, est une proie facile pour le gerris.
L’insecte prisonnier de la surface crée en se débattant des trains d’ondes
6925
2836
4
sinusoïdaux. La fréquence de battements des ailes du papillon est de 5 Hz ce qui
génère des ondes de même fréquence à la surface de l’eau.
59:1
* Quelle est, pour chaque insecte, la célérité de l’onde engendrée à la surface de
l’eau ; commentaire.
.65.1
55.1
7UDYDX[SUDWLTXHV
:196
73. Ultrasons. Vitesse du son dans l’air
On dispose :
8891
2320
Ź D’un émetteur en continu d’ultrasons sinusoïdaux, alimenté par une source de
tension continue (12 V à 15 V). La fréquence des ultrasons émis est réglable autour
de 40 kHz. Le boîtier comporte également une sortie BNC, délivrant une tension
électrique synchrone du signal sonore émis. On synchronise l’oscilloscope en
externe sur ce signal (trigger > source > externe).
0753
582:
Ź De deux récepteurs d’ultrasons « identiques », reliés aux entrées verticales de
l’oscilloscope.
ue e
t des
Micro
techn
iques
:211
Ź D’un rail double muni d’un emplacement pour l’émetteur et de deux glissières
graduées pour les récepteurs.
a) On ajuste la fréquence émise pour obtenir une réponse optimale des récepteurs.
Comment mesurer cette fréquence f ?
e Mé
caniq
b) Décrire un protocole de mesure de la longueur d’onde λ . On déduit la célérité c
des mesures de λ et f . Quelles sont les causes d’incertitude sur la mesure de c ?
344,8
344,3
346,0
342,5
340,2
353,0
périe
c ( m.s −1 )
mesures
ure d
c) Comment utiliser l’ensemble des
expérimentateurs différents :
de
350,2
350,8
c
effectuées
338,0
345,1
352,1
par
12
337,3
e Na
Écol
tiona
le Su
d) Discuter la cohérence de l’intervalle de confiance à 95% avec la valeur théorique
issue d’une modélisation du comportement de l’air (modèle gaz parfait) :
&KDSLWUH
c=
γ RT
où γ = 1, 4 , R = 8, 31J.K −1mol −1 , M = 29 g.mol −1 et T est la
M
température en kelvin.
6925
2836
4
74. Ondes stationnaires sur une corde de Melde
On dispose :
55.1
59:1
Ź D’un vibreur électrique de fréquence f variable, commandée par une source de
tension, d’une corde (masse linéique μ ) tendue grâce à une poulie et une masse m.
L’extrémité O reliée au vibreur a un mouvement sinusoïdal de faible amplitude.
L’extrémité sur la poulie forme un obstacle fixe.
La tension de la corde est réglable par la masse m.
.65.1
Ź D’une règle graduée et de plusieurs masses marquées de 10 g à 200 g.
8891
2320
:196
a) Pour une longueur L (de l’ordre d’un
mètre) et une tension F (par exemple
avec m = 20 g ) fixées, qu’observe-t-on
pour une fréquence quelconque ?
Comment observer les modes propres ?
m
582:
b) Comment mesurer la longueur d’onde λ n du mode propre de fréquence f n ?
0753
c) Quel mode choisir si on fait une mesure unique de la célérité c ?
d) Pour diverses valeurs de F = m g , on mesure la célérité c . Comment valider la
−1
50
71
80
87
120
110
techn
c (m.s )
20
44
iques
m (g)
:211
loi théorique c = F μ ?
Micro
e) Déduire de l’étude précédente une valeur expérimentale de la masse linéique de
la corde et conclure sachant que le constructeur indique : 20 g pour 197 m.
ure d
e Mé
caniq
ue e
t des
75. Un tube de Kundt, avec un haut-parleur dont la fréquence d’émission est de
f = 2, 0.103 Hz et un petit microphone fixé à l’extrémité d’une tige mobile, permet
d’étudier un système d’ondes stationnaires. Le microphone délivre une tension
proportionnelle à la surpression, cette tension est envoyée sur un oscilloscope. Le
déplacement mesuré du microphone entre 7 nœuds consécutifs est de 51,5 cm dans
l’air à 20 °C . Quelle est la célérité du son ? Évaluer l’incertitude de mesure sachant
que la fréquence indiquée par le fréquencemètre est 1998,2 Hz et que sa précision
est, dans la gamme de mesure 0,1% + 3 digit .
e Na
Écol
6LJQDX[KDUPRQLTXHVHWSURSDJDWLRQ
tiona
le Su
périe
76. Un vibreur de fréquence 60 Hz émet des ondes circulaires à la surface de l’eau
d’une cuve à ondes. On provoque l’immobilisation apparente du phénomène avec un
stroboscope.
a) Quelle est la fréquence des éclairs ?
b) On profite de l’immobilisation apparente pour faire une mesure approchée de la
distance qui sépare la 2e crête de la 12e et on trouve approximativement 5 cm .
Quelles grandeurs peut-on en déduire ?
59:1
6925
2836
4
77. Un émetteur à cornet (avec diode Gun) relié à une alimentation émet des ondes
électromagnétiques de fréquences 10 GHz . Cette fréquence est-elle élevée ou
faible ? À quelle longueur d’onde dans le vide correspond-elle ? Un autre cornet
récepteur placé dans l’axe du précédent recueille l’onde. Comment faut-il procéder
pour qu’un multimètre (utilisé en TP) et branché sur le cornet récepteur indique un
signal ?
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
55.1
78. On dispose les deux cornets précédents de telle manière que leurs axes soient
perpendiculaires et donc le signal s’annule ; comment le récupérer sans modifier la
géométrie du système ?
&KDSLWUH
6925
2836
4
Réponses aux questions
Le cours d’abord
55.1
59:1
Fonction sinusoïdale
:196
.65.1
1. a) La fonction est de période 2S . Compte-tenu des symétries quelques valeurs sur
ª Sº
S 4
S 2
S 3
D
0
l’intervalle «0, » suffisent :
¬ 2¼
cos(D )
1
0,7
0,5
0
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
On duplique le quart de sinusoïde obtenu, en effet cos(D ) cos(D ) , fonction paire,
symétrique par rapport à Oy.
ªS
º
De plus dans l’intervalle « , S » , on utilise cos(S D ) cos(D ) .
2
¬
¼
3
S
ª
º
, on utilise cos(S D ) cos(D ) .
Et dans l’intervalle «S ,
2 »¼
¬
ure d
e Mé
b) Le graphe n’a pas changé, il suffit simplement de modifier les graduations de
l’axe des abscisses avec t D Z .
y
S 2 S
D
2S
périe
le Su
Écol
e Na
tiona
La période 2S , en radians, correspond donc à T
Signaux harmoniques et propagation
t
t
2S Z
T
S 2Z S Z
T 4 T 2
2S
Z
.
63
Réponses aux questions
■ Réponses aux questions
caniq
Ym est l’amplitude de la sinusoïde (distance crête à crête divisée par 2)
0
T/4
T/2
3T/4
T
Zt
0
S 2
S
3S 2
2S
Z t S 2
S 2
0
S 2
S
3S 2
Ym cos (Z t S 2)
0
Ym
0
Ym
0
55.1
59:1
t
:196
.65.1
c)
6925
2836
4
La notation y (D ) ne représente pas une fonction décrivant les variations avec D , il
faudrait écrire y f (D ) . La notation indique que la grandeur physique,
dimensionnée, notée y dépend de D . Cette même grandeur peut dépendre de t si
D dépend de t , ce que l’on décrit, en gardant la notation y avec y (t ) .
:211
0753
582:
8891
2320
Le graphe de y1 (t ) correspond à celui
de y (t ) décalé de T 4 vers la droite.
y1 Ym cos(Z t S 2) passe par un
maximum, pour t T 4 , après y (t )
maximale en t 0 .
techn
iques
y1 Ym cos(Z t S 2) est en retard de T 4 (soit de S 2 en phase)
sur y(t ) Ym cos(Z t )
e Na
Écol
64
caniq
e Mé
ure d
périe
tiona
le Su
Sur le graphe ci-contre y(t ) Ym cos(Z t ) ,
en pointillé, et y2 Ym cos(Z t M ) avec
M ! 0 , en trait plein. y2 passe bien par un
maximum avant y . Pour faire varier M
facilement, on peut tracer sur un papier
calque, et en le superposant sur le tracé de
y, on aura M ! 0 en décalant y2 vers la
gauche et M 0 en décalant y2 vers la
droite.
ue e
t des
Micro
d) y2 Ym cos(Z t M ) , on a vu que M S 2 0 décalage vers la droite et un
retard de y2 sur y . Donc M ! 0 décalage vers la gauche (vers les t
décroissants) et une avance de y2 sur y .
Chapitre 1
6925
2836
4
On remarque alors que l’avance augmente de 0 à S , mais que M ! S se traduit par
un retard de y2 sur y ! On compare en effet les positions des maximas les plus
proches, on peut décrire ce retard avec M 0 .
Finalement on choisit M @S , S @ plutôt que M >0, 2S > , soit une correspondance
immédiate entre le signe de M et le retard ou l’avance de y2 sur y .
M est l’avance de phase algébrique de Ym cos(Z t M ) sur Ym cos(Z t )
M
59:1
: y2 est en quadrature avance sur y
55.1
2
S
.65.1
M
S
: y2 est en quadrature retard sur y
2
S : y2 et y sont en opposition de phase
:196
M
0 : y2 et y sont en phase
2320
M
8891
L’oscillateur harmonique
e Mé
caniq
Les oscillations se produisent de part et d’autre d’une position qui correspond à
l’équilibre du système. Écarté de cette position d’équilibre, le système oscillant est
sollicité par une force qui tend à le ramener vers cette position d’équilibre, autour de
laquelle il finit par osciller.
e Na
Écol
Signaux harmoniques et propagation
tiona
le Su
périe
ure d
3. Remarquons tout d’abord que la détermination expérimentale de y (t ) est un
ensemble (dit discret) de valeurs et pas un graphe de fonction mathématique que
l’on peut approcher par interpolation comme dans la courbe 2. Sur cette courbe 2,
y (t ) n’est pas périodique, au sens mathématique : elle ne reprend pas
périodiquement les mêmes valeurs à cause d’un amortissement que l’on peut
imputer aux frottements (par exemple sur l’air). Ceci est confirmé, sur la courbe 3
65
Réponses aux questions
■ Réponses aux questions
ue e
t des
Micro
techn
iques
:211
0753
582:
2. On peut citer : la même masse posée sur le ressort vertical (suspension de voiture),
accrochée à un ressort horizontal et coulissant sur un axe horizontal, ou bien avec
deux ressorts ; une bille au fond d’une cuvette ; un pendule simple ; une tige
accrochée à un fil métallique dit de torsion…
On remarque alors que l’avance augmente de 0 à S , mais que M ! S se traduit par
un retard de y2 sur y ! On compare en effet les positions des maximas les plus
proches, on peut décrire ce retard avec M 0 .
Finalement on choisit M @S , S @ plutôt que M >0, 2S > , soit une correspondance
immédiate entre le signe de M et le retard ou l’avance de y2 sur y .
M est l’avance de phase algébrique de Ym cos(Z t M ) sur Ym cos(Z t )
M
M
M
0 : y2 et y sont en phase
S
2
: y2 est en quadrature avance sur y
S
: y2 est en quadrature retard sur y
2
S : y2 et y sont en opposition de phase
8797
M
9252
L’oscillateur harmonique
de P
aris:2
Les oscillations se produisent de part et d’autre d’une position qui correspond à
l’équilibre du système. Écarté de cette position d’équilibre, le système oscillant est
sollicité par une force qui tend à le ramener vers cette position d’équilibre, autour de
laquelle il finit par osciller.
niv.s
chola
Signaux harmoniques et propagation
rvox.
com:
Univ
ersité
3. Remarquons tout d’abord que la détermination expérimentale de y (t ) est un
ensemble (dit discret) de valeurs et pas un graphe de fonction mathématique que
l’on peut approcher par interpolation comme dans la courbe 2. Sur cette courbe 2,
y (t ) n’est pas périodique, au sens mathématique : elle ne reprend pas
périodiquement les mêmes valeurs à cause d’un amortissement que l’on peut
imputer aux frottements (par exemple sur l’air). Ceci est confirmé, sur la courbe 3
65
Réponses aux questions
■ Réponses aux questions
1108
5026
8:88
9123
20:1
96.6
5.15
5.15
9:16
2. On peut citer : la même masse posée sur le ressort vertical (suspension de voiture),
accrochée à un ressort horizontal et coulissant sur un axe horizontal, ou bien avec
deux ressorts ; une bille au fond d’une cuvette ; un pendule simple ; une tige
accrochée à un fil métallique dit de torsion…
pour laquelle les frottements plus forts dans l’eau se traduisent par un amortissement
expérimental plus important.
Des mesures simples, sur la courbe 2, entre deux zéros (non consécutifs), deux
maximums ou deux minimums donnent des valeurs égales, de l’ordre de 1,0 s,
compte-tenu de la dispersion liée aux mesures. Ceci permet une mesure de T sur
plusieurs pseudo-périodes, 4 sont accessibles sur la courbe 2.
L’existence d’une pseudo-période montre que T ne varie pas alors que
« l’amplitude » diminue, ce qui n’est pas un résultat intuitif. De plus
« l’amplitude » dépendant de conditions initiales, il est donc clair que T n’en
dépend pas et constitue une caractéristique de l’oscillateur.
Modélisation : on cherche une représentation mathématique simple pour y (t ) , pas
forcément proche de la réalité. Si l’amortissement est assez faible, y (t ) est proche
d’un modèle sinusoïdal de période T .
4. y (t )
A cos(Z 0 t M ) , il s’agit ici du modèle, déjà étudié à la question 1. ; A est
8797
l’amplitude, Z 0 la pulsation propre de l’oscillateur, Z 0 t M la phase instantanée et
9:16
5.15
A Z 0 sin(Z 0 t M ) . Les C.I. proposées
A cos(Z 0 t M ) , on déduit y (t )
­ y(0)
conduisent au système : ®
¯ y(0)
2S
T
et Z0
A cos M Ym
AZ0 sin M
­M 0
­M S
ou ®
®
0
¯ A Ym
¯ A Ym
5.15
De y (t )
1
T
f
96.6
la fréquence est
9252
M la phase à l’origine (souvent appelée phase tout court). On a t : A d y (t ) d A .
En notant T la période de l’oscillateur sinusoïdal :
20:1
Finalement y (t ) Ym cos(Z 0 t ) ; les conditions initiales correspondent à un système
A cos(Z 0 t M ) , il suffit de calculer y (t )
8:88
5. À partir de y (t )
9123
déplacé de Ym à partir de l’équilibre et lâché avec une vitesse nulle.
5026
puis y(t ) AZ 02 cos(Z 0 t M ) . Soit y(t ) Z 02 y(t ) et
A Z 0 sin(Z 0 t M ) ,
y Z 02 y 0
aris:2
1108
Cette équation est une équation différentielle, la solution sinusoïdale est qualifiée
d’harmonique, et l’équation est appelée équation différentielle de l’oscillateur
harmonique. Une étude théorique sera faite chapitre 6 questions 19. et 40..
de P
6. Changeons l’origine des dates avec Z tc Z t M1 , il vient :
Univ
ersité
­u1 (t ) U m1 cos(Z t )
­u1 (tc) U m1 cos(Z t c)
et ®
en utilisant à nouveau
®
¯u2 (tc) U m 2 cos(Z tc M 2 M1 )
¯u2 (t ) U m 2 cos(Z t M )
la notation t avec la nouvelle origine et en notant :
com:
M M2 M1 l’avance de phase de u2 (t ) sur u1 (t )
niv.s
chola
66
rvox.
On retrouve la définition et le vocabulaire donnés à la question 1.
Chapitre 1
Propagation d’un signal
7. Un signal est une modification temporaire de certaines propriétés d’un milieu.
► Si on fait tomber un objet dans un liquide et que l’on observe sa surface : des
rides apparaissent, formant des cercles qui s’élargissent autour du point de chute.
La déformation verticale de la surface créée par la chute de l’objet se propage :
on dit qu’un signal se propage. Un objet très léger flottant à la surface subit au
passage du signal des oscillations quasi verticales puis reprend sa position, il
n’est pas emporté (en moyenne).
L’eau constitue le milieu de propagation du signal. Si le milieu de propagation
est homogène, le signal se propage avec une vitesse (on dit aussi célérité)
constante qui dépend du milieu et ce dans toutes les directions qui lui sont
offertes.
9252
8797
► Une corde, fixée à une de ses extrémités, est maintenue tendue par un
expérimentateur. Celui-ci provoque une secousse, dans une direction
perpendiculaire à la corde. Le signal de type déformation se propage le long de la
corde. Le milieu, matériel, de propagation est ici la corde.
5.15
9:16
Dans ces deux exemples, la déformation se fait dans une direction perpendiculaire à
la direction de propagation : le signal est dit transversal. Il existe aussi des signaux
longitudinaux pour lesquels la déformation du milieu se fait dans la direction de
propagation.
96.6
5.15
► Si on provoque une compression de quelques spires à l’extrémité d’un ressort
étiré, une zone de compression se propage le long du ressort.
67
Réponses aux questions
■ Réponses aux questions
niv.s
chola
Signaux harmoniques et propagation
rvox.
com:
Univ
ersité
de P
aris:2
1108
5026
8:88
9123
20:1
► Les signaux acoustiques sont aussi de type longitudinaux. Par exemple la
membrane d’un haut-parleur possède un mouvement vibratoire autour de la
position d’équilibre x 0 .
Lorsqu’elle se déplace vers les x croissants, elle
comprime la tranche d’air placée à sa droite ; celle-ci ne
l
pouvant rester dans cet état de surpression se détend en
x
0
comprimant la tranche voisine sur sa droite et ainsi de
suite : la surpression se propage le long de l’axe Ox
comme sur un long ressort à spires non jointives auquel on aurait donné une
impulsion vers la droite.
Lorsqu’ensuite la membrane se déplace vers les x décroissants, elle détend la
tranche d’air placée à sa droite ; celle-ci ne pouvant rester dans cet état de
dépression, se comprime en détendant la tranche voisine sur sa droite et ainsi de
suite : la dépression se répand le long de l’axe Ox comme sur un long ressort à
spires non jointives auquel on aurait donné une impulsion vers la gauche.
La perturbation sonore engendrée dans l’air de proche en proche (et qui va ellemême provoquer l’oscillation du tympan dans l’oreille d’où la sensation sonore)
est représentée par la surpression (l’écart entre la pression et la pression statique
de l’air) : c’est une grandeur algébrique, positive en cas effectivement de
surpression, et négative en cas de dépression.
Ces signaux mécaniques utilisent les propriétés élastiques du milieu de propagation
pour se propager. Ainsi les signaux sonores peuvent se propager dans l’air, dans les
liquides ou les solides, mais pas dans le vide.
Il est conseillé d’aller voir sur Internet l’excellent documentaire de 1965 de R.
Castaing (Jean Dallet production) : Ondes Progressives.
corde, la relation c
F
5.15
5.15
9:16
9252
8797
u
8. Si
le
signal
est
une
c
déformation périodique et
entretenue, on obtient une onde
corde à t
qui se propage à vitesse
N
constante (dans un milieu
homogène) : onde progressive.
O
En considérant deux points
correspondants du signal (ou
u
de l’onde) à t et à t 't la
d
corde à t 't
d
célérité est : c
't
Pour un signal à la surface de
M
l’eau la vitesse augmente avec
la profondeur. Pour des O
profondeurs de l’ordre du cm,
elle est de 30cm.s1 et de 5 m.s 1 pour des profondeurs de l’ordre de 3 m.
Pour une corde tendue c dépend de la tension F et de la masse linéique P de la
donne, pour F 10 N et P
0,10 kg.m1 , une vitesse de
96.6
P
l’ordre de 10 m.s qui correspond aux valeurs observées expérimentalement.
La vitesse du son dans l’air est de l’ordre de 340 m.s 1 (elle dépend légèrement de la
température). Dans l’eau, 1, 4 km.s1 et dans les solides de 3 à 5 km.s 1 .
8:88
9123
20:1
1
aris:2
1108
5026
9. Les signaux électromagnétiques (ondes radio, lumière…), même s’ils peuvent être
décrits avec le même formalisme mathématique, sont de nature radicalement
différente. Les grandeurs physiques modifiées par un signal électromagnétique sont
les champs électrique et magnétique. Un milieu matériel élastique n’est pas
nécessaire pour la propagation : la lumière provenant du Soleil se propage dans le
vide intersidéral pour parvenir jusqu’à la Terre.
niv.s
chola
68
rvox.
com:
Univ
ersité
de P
10. k x est en radians, donc k est en rad.m 1 ou m 1 . La période spatiale O , de type
2S
longueur d’onde, est en m. La période de cosinus, 2 S k O 2 S k
.
O
Comme on l’a vu dans la question 1., si \ augmente, y ( x) A cos (k x \ ) se
décale vers la gauche, vers les x décroissants. Le déplacement est suivant les x
croissants si \ diminue. Ainsi la variation de \ , par exemple au cours du temps, se
traduit par une propagation de la sinusoïde.
Chapitre 1
9123
20:1
96.6
5.15
5.15
9:16
9252
8797
Le déplacement se fera à vitesse constante si \ est une fonction linéaire du temps.
2S
1
\ est
déplacement
à vitesse
constante
uneécrire
fonction
Z linéaire
OnLe
pose
alors \ se
avec
quesil’on
peut
. du temps.
Z en rad.s
Z tfera
T
2
S
On pose alors \ Z t2avec
.
S Z2Sen rad.s1 que l’on peut écrire Z
x
t ) se déplace à vitesse constante
Ainsi y ( x, t ) A cos (
vers les x
T
O2S T2S
x, t )'t A cos
Ainsi y (En
à déplacement
vitesse constante
vers période
les x
, donc le
est d’une
croissants.
T , (\ ax variét )de se2 Sdéplace
O
T
croissants. En 't T , \ a varié de 2 S , donc le déplacementcest Od’une période
spatiale
.
'x O (cf. question 1.). La vitesse, constante, est donc
OT
spatiale 'x O (cf. question 1.). La vitesse,2Sconstante,
2S est donc c T .
x) , finalement :
y ( x, t ) peut aussi s’écrire y ( x, t ) A cos ( t T
2S
2OS
x) , finalement :
y ( x, t ) peut aussi s’écrire y ( x, t ) A cos ( t T
O
2S ·
2S §
x·
§ 2S
y ( x, t ) A cos ¨
t
x ¸ A cos
¨ t x ¸ représente une déformation
2
S
2
S
2
S
§
·
§
·
T
O
T
c
©
y ( x, t ) A cos
t
x¹ ¸ A cos ©¨ t ¹¸ représente une déformation
¨
T © c vers
c ¹ les x croissants, avec O cT .
sinusoïdale se déplaçant
àOvitesse
constante
© T
¹
sinusoïdale se§ déplaçant
à
vitesse
constante
c
vers
2S
2S ·
2S §
x · les x croissants, avec O cT .
y ( x, t ) A cos ¨
t
x ¸ A cos
t ¸ correspond à un déplacement vers
¨
© §¨T2S t O2S x¹ ·¸ A cos T2S ©§¨ t cx ¹·¸ correspond à un déplacement vers
y ( x, t ) A cos
O ¹
T ©
c ¹
les x décroissants.© T
les x décroissants.
On a ainsi traduit mathématiquement la propagation des signaux observés
On a ainsi traduit
la propagation
desdesignaux
observés
expérimentalement,
dansmathématiquement
le cas d’une modélisation
sinusoïdale
la déformation.
expérimentalement, dans le cas d’une modélisation sinusoïdale de la déformation.
Une déformation quelconque u ( x, t ) , par exemple l’élongation transversale d’une
Une déformation quelconque u ( x, t ) , par exemple l’élongation transversale d’une
corde, qui se propage suivant Ox, dépend de deux variables :
corde, qui se propage suivant Ox, dépend de deux variables :
► x parce que à t t1 fixé (une photographie), u ( x, t1 ) représente la forme de la
► x parce que à t t1 fixé (une photographie), u ( x, t1 ) représente la forme de la
corde à cet instant,
corde à cet instant,
► t parce que à x x1 fixé (un point de la corde), u ( x1 , t ) représente l’évolution
► t parce que à x x1 fixé (un point de la corde), u ( x1 , t ) représente l’évolution
d’un
point
choisi
d’un
point
choisidedelalacorde
cordeau
aucours
coursdu
du temps.
temps.
O
O
MM
rvox.
niv.s
chola
Signaux harmoniques et propagation
Signaux harmoniques et propagation
Réponses aux questions
cc
corde
corde
com:
Univ
ersité
impose auau point
point OO de
de lala corde
corde
12.12.
OnOn impose
u
(
x
0,
t
)
f
(
t
)
.
Avec
une
propagation
de O
O
u ( x 0, t ) f (t ) . Avec une propagation de
versM M
, lesignal
signalarrive
arriveenen MM avec
avec lele retard
retard
vers
, le
d
d
OM. .
't 't coùoùd d OM
c
69
69
Réponses aux questions
■ Réponses aux questions
de P
aris:2
1108
5026
8:88
11.11.
Pour
l’exécution
graphique dans
dans une
unefenêtre
fenêtre
Pour
l’exécutionduduprogramme,
programme,choisir
choisir un
un affichage
affichage graphique
indépendante
dedelalaconsole.
indépendante
console.
Ligne
17,17,le lesigne
vers les
les xx croissants,
croissants,unun
Ligne
signemoins
moinsdans
dansyyimpose
impose une
une propagation
propagation vers
le déplacement
déplacementprévu
prévu
simple
changement
cos(2*pipi**xx/ /LL2*
2* pi
pi**tt // T
T )) produit
produit le
simple
changementenencos(2*
vers
les
x
décroissants.
vers les x décroissants.
Ligne
20,20,
la la
valeur
deux affichages
affichagesetetdonc
donclala
Ligne
valeurdede"interval"
"interval"fixe
fixelaladurée
durée en
en ms
ms entre deux
vitesse
dede
propagation.
car cc LL TT. .
vitesse
propagation.On
Onpeut
peutaussi
aussidiminuer
diminuer TT ,, ligne 11, car
blit
True
, effacelelesignal
signalentre
entredeux
deuxaffichages.
affichages.
blit
= =True
, efface
d·
§
§ d·
xM , t ) u ¨ x 0, t ¸ f ¨ t ¸ indépendamment de l’orientation de
c¹
©
© c¹
l’axe des x, seul compte le sens du déplacement.
u( x
c
► Si Ox est orienté dans le sens de la
propagation, xM ! 0 et d xM
§ x ·
f ¨ t M ¸ et en un point x quelconque : u ( x, t )
c ¹
©
On retrouve la dépendance établie à la question 10.
xM , t )
x
► Si Ox est orienté dans le sens opposé à la
propagation, xM 0 et d xM
u ( x, t )
x
§ x·
f ¨t ¸
© c¹
c
x
M
5.15
O
§ x ·
f ¨ t M ¸ et en un point x quelconque : u ( x, t )
c ¹
©
5.15
xM , t )
c
§ x·
f ¨t ¸
© c¹
96.6
u( x
O
9252
car le signal passe en M avant O, et d
M
§ x·
f ¨t ¸
© c¹
8797
La relation subsiste si M est avant O,
soit x 0 :
d·
§
u ( x, t ) u ¨ x 0, t ¸
c¹
©
9:16
u( x
x
M
O
0)
g ( x)
corde à t
0
g ( x ct )
corde à t
ct
c
de P
Univ
ersité
g ( x ct )
rvox.
70
0)
niv.s
chola
u ( x, t ) u ( x ct , t
com:
► Si Ox est orienté dans le
sens opposé à la propagation,
x
1108
0)
aris:2
u ( x, t ) u ( x ct , t
5026
► Si Ox est orienté dans le
sens de la propagation :
c
8:88
13. On impose u ( x, t
9123
20:1
Il s’agit dans les deux cas du même signal, on a seulement choisi des orientations
différentes de l’axe Ox. Le signal imposé par la fonction f et son sens de
propagation sont indépendants de ce choix.
x
corde à t
0
x
ct
corde à t
x
Chapitre 1
Conclusion : le signal (déformation) dépend de x et de t : u ( x, t )
En posant u ( x
0, t )
f (t )
§ x·
f ¨ t ¸ pour une propagation vers les x
© c¹
§ x·
u ( x, t ) f ¨ t ¸ pour une propagation vers les x
© c¹
En posant u ( x, t 0) g ( x)
u ( x, t )
u ( x, t )
g ( x ct ) pour une propagation vers les x
u ( x, t )
g ( x ct ) pour une propagation vers les x
niv.s
chola
Signaux harmoniques et propagation
rvox.
com:
L’expérience montre qu’il en est de même pour tous
les types de signaux : la présence d’un premier
signal (1) ne modifie pas la propagation dans le
même milieu d’un deuxième signal (2).
71
Réponses aux questions
■ Réponses aux questions
Univ
ersité
de P
aris:2
1108
5026
8:88
15. Considérons par exemple un fil élastique tendu, aux
extrémités duquel on provoque deux ébranlements
transversaux allant à la rencontre l’un de l’autre.
On constate (cf. schémas tirés de photographies cicontre) que les ébranlements passent l’un à travers
l’autre, se croisent, sans subir de modification :
après leur rencontre, leurs formes et leurs célérités
respectives sont inchangées.
Pendant le croisement des signaux on dit qu’ils se
superposent. Les ébranlements produits ajoutent
leurs effets, chaque signal apporte sa contribution au
déplacement du fil.
9123
20:1
96.6
5.15
5.15
9:16
9252
8797
14. Il s’agit de la fréquence d’un signal acoustique sinusoïdal (dit harmonique). Elle est
perçue par l’oreille humaine par une sensation de hauteur du son : une fréquence
faible correspond à un son grave et une fréquence élevée à un son aigu. L’oreille
humaine entend les sons grosso modo de 20 Hz à 20 kHz (ce facteur 10 3 est très
important comparé au facteur 2 des fréquences lumineuses perçues par l’œil
humain : 400 nm à 800 nm). La fréquence du La du diapason est 440 Hz . Si on
double la fréquence, on passe à l’octave supérieure, 880 Hz est aussi un La. La
gamme de fréquences de la parole se situe entre 150 Hz et 3 kHz .
La même note jouée par des instruments différents ou chantée par des chanteurs
différents, diffère par le timbre. En effet dans le son produit par un instrument, pour
une note donnée, il n’y a pas que la fréquence correspondant à cette note (dite
fondamentale), mais des fréquences multiples de ce fondamental, appelées
harmoniques. Le nombre et l’importance des harmoniques confèrent au son sa
richesse. Un son purement sinusoïdal (harmoniquement pur) n’est pas très plaisant à
entendre.
Dans la région de recouvrement, chaque signal apporte sa propre contribution ; si
u1 ( M , t ) caractérise la perturbation qu’apporterait le signal 1 seul au point M et
u 2 ( M , t ) celle qu’apporterait le signal 2 seul en M au même instant, la perturbation
qui affecte le point M à la date t sera caractérisée par :
u (M , t ) u1 (M , t ) u 2 (M , t )
Cette propriété d’addition de grandeurs caractéristiques de signaux de même nature
constitue le principe de superposition. Ce principe s’applique quel que soit le
nombre de signaux qui se croisent, pourvu que les perturbations apportées au milieu
ne soient pas trop importantes.
16. Sur une extrémité fixe, l’expérience donne un
signal réfléchi, inversé par rapport à l’incident
et peu amorti.
En effet au point fixe A :
ui ( xA , t ) ur ( xA , t ) 0 car A immobile, donc :
A
8797
A
9252
ur ( xA , t ) ui ( xA , t )
9:16
Sur une extrémité libre (corde ou ressort suspendus), la réflexion
se fait sans retournement ni déformation.
96.6
5.15
5.15
En effet le déplacement de l’extrémité libre dû au signal incident
est équivalent à une excitation par un expérimentateur, dans le
même sens, générant ainsi le signal réfléchi.
20:1
On peut voir ces expériences avec un ondoscope dans le documentaire de 1965 de R.
Castaing (Jean Dallet production) : Ondes Progressives.
de P
aris:2
1108
5026
8:88
9123
17. Ondes circulaires à la surface de l’eau. Ondes sphériques émises par une source
sonore ponctuelle.
Tous les points de la surface d’onde vibrent en phase.
Loin d’une source ponctuelle, les surfaces d’onde sont localement des plans. Pour
tous les points d’un même plan d’onde, on a le même u ( x, t ) :
x
niv.s
chola
72
rvox.
com:
Univ
ersité
S
Chapitre 1
Ondes stationnaires
18. M représente l’avance de phase de u2 sur u1 en x 0 .
Z
Z
c
M x1 M x1 Si u2 et u1 sont en phase en x1 x1
c
c
2Z
On peut alors choisir ce point comme origine de l’axe des x, ce qui fixe M
0.
Le principe de superposition donne l’amplitude résultante en un point d’abscisse x
à l’instant t :
u( x, t ) u 1 ( x, t ) u 2 ( x, t ) a cos(Z (t x / c)) a cos(Z ( t x / c))
La relation : cos p cos q
2 cos
Zx
pq
pq
cos
donne avec
2
2
c
u ( x, t )
2S x
:
O
2a cos(2S x / O ) cos(Z t )
5.15
5.15
9:16
9252
8797
On peut écrire u( x, t ) A( x ) cos(Z t ) , produit de deux fonctions trigonométriques,
l’une de l’espace, l’autre du temps.
En chaque point on a une vibration sinusoïdale A cos(Z t ) et A dépend
(sinusoïdalement) de x.
La phase Z t est indépendante de x et ne dépend que de t , elle n’est pas du type
Z ( t r x c) ; il n’y a plus de propagation, l’onde fait du « sur place » ; on dit que la
phase de l’onde est stationnaire, et par extension que l’onde est stationnaire.
9123
20:1
96.6
x il existe des points qui, au cours du temps, vibrent avec une amplitude
maximale : ce sont les ventres.
2S x p
O
§ 2S x ·
xp p
cos ¨
où p
pS
¸ r1
2
O
© O ¹
En effet c’est en ces valeurs particulières x p (de la variable continue x ) que
2S x pc
S
O
2
pcS
x pc
§ c 1·O
¨p ¸
2¹ 2
©
de P
Là aussi la distance entre deux nœuds consécutifs est x pc1 x pc
où pc
O
2
.
O
.
4
Avec notre choix d’origine sur l’axe Ox, le point O est bien sûr un ventre car u2 et
u1 y sont en phase.
Entre deux nœuds tous les points vibrent en phase, de part et d’autre d’un nœud, les
points vibrent en opposition de phase.
niv.s
chola
Signaux harmoniques et propagation
rvox.
com:
Univ
ersité
Conclusion : la distance entre un nœud et un ventre consécutifs est
73
Réponses aux questions
■ Réponses aux questions
0
aris:2
§ 2S x ·
cos ¨
¸
© O ¹
1108
5026
8:88
l’on observe la position des ventres ; on note que la distance entre deux ventres
O
.
consécutifs est x p 1 x p
2
x il existe des points d’amplitude nulle et donc u 0 t : ce sont les nœuds.
6925
2957
9
14. Un dioptre plan séparant deux milieux d’indices n et n′ est-il stigmatique ? Quelles
sont les conditions de stigmatisme approché ? Ces conditions étant respectées,
établir une relation de conjugaison qui lie la position du point objet A et celle de
son image A′ .
55.1
59:1
15. Un observateur, face à une étendue d’eau calme et plane, regarde un poisson se
trouvant dans l’eau. Pourquoi voit-il une image de ce poisson sans utiliser de
dispositif particulier pour se placer dans les conditions de Gauss ? Estimer par
rapport à la profondeur réelle, la profondeur apparente de l’image du poisson dans
l’eau ; quel est son grandissement ? Conclure par rapport à l’observation courante
dans cette situation.
.65.1
/HVOHQWLOOHVPLQFHV
8891
2320
:196
16. Quelles inégalités définissent le modèle lentille « mince » ? Quelle conséquence en
tire-t-on pour un rayon passant par son centre ? Comment sont définis les foyers et
comment sont-ils placés par rapport à la lentille ? Distinguer les deux cas de lentilles
en précisant si les foyers sont réels ou virtuels. Comment s’exprime la distance
focale et quel est son signe ? Comment est définie la vergence ?
0753
582:
17. Comment construire de façon précise l’image d’un objet plan perpendiculaire à
l’axe, dans le cadre du stigmatisme approché ? Quelle est alors la représentation
d’une lentille mince dans le cadre de cette construction ?
iques
:211
18. Par quelle(s) construction(s) obtient-on le rayon émergent correspondant à un rayon
incident quelconque ?
19. On rappelle les relations de conjugaison des lentilles.
1 1 1
− =
x′ x f ′
qu’indiquent les signes de x et x′ ?
Micro
en notant x = OA et x′ = OA′
techn
• Origine au centre optique (formule de Descartes) :
ue e
t des
• Origines aux foyers (formule de Newton) :
σσ ′ = − f ′2
en notant σ = FA et σ ′ = F ′A′ :
caniq
γ=
A′B′
AB
e Mé
• Le grandissement transversal est défini par
Quelles caractéristiques de l’image indique-t-il ?
x′
σ′
f
=− =−
x
f′
σ
périe
γ=
ure d
Les expressions du grandissement pour les lentilles minces sont :
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
L’image est homothétique de l’objet par rapport à quel point ?
20. On associe deux lentilles minces de même axe et de distances focales f1′ et f 2′ .
6925
2957
9
Ź Les lentilles sont accolées (l’interstice e = O1O2 ≈ 0 ) ; quelle est la distance
focale f ′ de la lentille mince équivalente ? Justifier l’utilisation de la vergence
exprimée en dioptries.
Ź Les deux lentilles sont dissociées ( e = O1O2 ≠ 0 ) et on définit l’intervalle optique
59:1
Δ par Δ = F1′F2 ; à quelle condition le système est-il afocal (définir ce terme) ?
.65.1
55.1
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
2320
:196
Les angles de réflexion et de réfraction (pour l’application de la loi de
Descartes) sont toujours définis par rapport à la normale au dioptre (et non pas
par rapport au dioptre).
582:
8891
L’angle de réfraction limite il n’existe que si l’on passe dans un milieu plus
réfringent, c’est-à-dire d’indice plus grand. À l’inverse le phénomène de
réflexion totale ne peut exister que lors du « passage » dans un milieu moins
réfringent.
ue e
t des
Micro
techn
iques
:211
0753
La recherche de l’image d’un objet à distance finie doit commencer par un
dessin avec une construction soignée en suivant les recommandations cidessous :
– utiliser trois rayons particuliers fléchés (avec 1, 2 ou 3 flèches) dans l’ordre
suivant : 1. le rayon qui passe par le centre et qui n’est pas dévié, 2. le rayon
qui arrive parallèlement à l’axe et qui ressort par le foyer image et enfin 3. le
rayon qui arrive par le foyer objet et qui ressort parallèlement à l’axe. Sans
oublier que l’axe optique constitue lui-même le support d’un rayon. Si la figure
comporte plusieurs constructions, deux rayons suffisent ;
– caractériser l’image construite par ses trois propriétés dans l’ordre : réelle ou
virtuelle, droite ( γ > 0 ) ou renversée ( γ < 0 ), plus grande ( γ > 1 ) ou plus
périe
ure d
e Mé
caniq
petite ( γ < 1 ) que l’objet ;
– ne pas oublier de caractériser l’opération réalisée par la lentille en terme de
faisceau : le faisceau incident, s’il est divergent (objet réel) est-il rendu plus ou
moins divergent (image virtuelle) ou convergent (image réelle) ? le faisceau
incident, s’il est convergent (objet virtuel) est-il rendu plus ou moins
convergent (image réelle) ou divergent (image virtuelle) ? (voir les questions
26. et 27.).
S’exercer à construire l’image d’un objet (d’abord réel puis virtuel) par une
lentille (d’abord convergente puis divergente).
e Na
Écol
tiona
le Su
L’image d’un point A sur l’axe ne peut pas être obtenue avec les rayons
particuliers, confondus avec l’axe. Il est très maladroit de surcharger
inutilement la figure en utilisant un objet fictif AB , en construisant son image
A′B′ et enfin en déduisant A′ par aplanétisme ! La méthode générale de tracé
&KDSLWUH
d’un seul rayon quelconque passant par A donne A′ (sur l’axe)
immédiatement, avec un minimum de construction (laisser apparente la
détermination du foyer secondaire).
6925
2957
9
Ne pas parler d’image si le stigmatisme n’est pas avéré.
Ne pas confondre objet et image : on ne voit pas un objet à travers une lentille,
mais son image (pour une observation dans le cadre des conditions de Gauss).
55.1
59:1
On utilise souvent l’expression « image nette » il s’agit de préciser une netteté
maximale dans le cadre d’un stigmatisme approché et en aucun cas de
distinguer une image nette parmi d’autres qui ne le seraient pas !
2320
:196
.65.1
Ne
Ne pas
pas évoquer
évoquer «« le
le foyer
foyer »» ou
ou «« le
le plan
plan focal
focal »» d’une
d’une lentille
lentille puisque
puisque dans
dans
chaque
cas
il
y
en
a
deux,
mais
bien
préciser
«
le
foyer
objet
»
ou
«
le
foyer
chaque cas il y en a deux, mais bien préciser « le foyer objet » ou « le foyer
image
image »» d’une
d’une part
part et
et «« le
le plan
plan focal
focal objet
objet »» ou
ou «« le
le plan
plan focal
focal image
image »» d’autre
d’autre
part.
part.
8891
Foyer
Foyer objet
objet F
F et
et foyer
foyer image
image F
F ′′ ne
ne sont
sont pas
pas conjugués
conjugués !!
techn
iques
:211
0753
582:
Il
Il faut
faut être
être bien
bien conscient
conscient que
que les
les constructions
constructions théoriques
théoriques d’image,
d’image, traduisant
traduisant
le
stigmatisme
approché
des
lentilles
minces,
n’utilisent
pas
le stigmatisme approché des lentilles minces, n’utilisent pas des
des rayons
rayons réels.
réels.
C’est
C’est la
la raison
raison pour
pour laquelle
laquelle dans
dans ces
ces constructions
constructions les
les angles
angles sont
sont
quelconques,
alors
que
dans
la
réalité,
seuls
les
rayons
peu
inclinés
permettent
quelconques, alors que dans la réalité, seuls les rayons peu inclinés permettent
d’obtenir
En conséquence,
conséquence, indépendamment
indépendamment de
d’obtenir une
une image.
image. En
de leur
leur valeur
valeur sur
sur le
le
schéma
de
construction
théorique
d’image,
il
faut,
pour
tout
angle
α ,,
schéma de construction théorique d’image, il faut, pour tout angle α
considérer
sin α
α ≈
≈ tan
tan α
α ≈
≈α
α ..
considérer sin
En
effet
cette
approximation
En effet cette approximation est
est àà l’origine
l’origine même
même du
du stigmatisme
stigmatisme approché
approché et
et
de
l’existence
de
l’image
construite
!
de l’existence de l’image construite !
ue e
t des
Micro
Il peut être utile de connaître les formules de conjugaison, même si l’énoncé
Il peut être utile de connaître les formules de conjugaison, même si l’énoncé
doit les rappeler. Cela permet de mieux s’adapter aux changements de notation
doit les rappeler. Cela permet de mieux s’adapter aux changements de notation
(par exemple OA noté x ou p ou d …). Respecter évidemment les notations
(par exemple OA noté x ou p ou d …). Respecter évidemment les notations
de l’énoncé.
de l’énoncé.
e Na
Écol
2SWLTXHJpRPpWULTXH
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
e Mé
caniq
Choisir entre « formule de Descartes » et « formule de Newton » en fonction
Choisir entre « formule de Descartes » et « formule de Newton » en fonction
des données de l’énoncé ou du résultat cherché (position par rapport au centre ?
des sommet
données ?deau
l’énoncé
ou du
cherché
(positionpermettent
par rapportsouvent
au centrede?
au
foyer ?).
Lesrésultat
formules
de Newton
au sommet ? au foyer ?). Les formules de Newton permettent souvent de
conclure plus rapidement. Les expressions de γ découplées par rapport à A et
conclure plus rapidement. Les expressions de γ découplées par rapport à A et
A′ sont souvent intéressantes.
A′ sont souvent intéressantes.
Toutes les grandeurs en optique géométrique sont algébriques, c’est-à-dire
qu’elles
Toutes les
optique
algébriques,
c’est-à-dire
ont grandeurs
un signe ! en
Ainsi
il fautgéométrique
traduire « onsont
photographie
un objet
à une
qu’elles ont un signe ! Ainsi il faut traduire « on photographie un objet à une
distance de 5 m » par x = OA = −5 m , si l’axe optique est orienté dans la
x = OA = −5 m , si l’axe optique est orienté dans la
distance de
5m
» parincidente.
direction
de la
lumière
direction
de
la
lumière
incidente.
C’est le cas aussi des distances focales, des grandissements, …
C’est
le cas aussi
des distances
desmal
grandissements,
… bien sûr à des
Une erreur
de signe
est de cefocales,
fait très
vue et conduit
Une
erreur de
signe estfantaisistes.
de ce fait très mal vue et conduit bien sûr à des
applications
numériques
applications numériques fantaisistes.
A′B′
qui
′B ′
AAB
n’est
Le grandissement
transversalduestgrandissement.
défini, de façon
par γ =n’est pas
qui
pas une expression
Legénérale,
grandissement
AB
caractéristique d’un système, il dépend du couple ( A, A′) .
n’est pas une expression du grandissement. Le grandissement n’est pas
caractéristique d’un système, il dépend du couple ( A, A′) .
L’approximation des petits angles, du type tan α ≈ α , suppose que l’angle soit
exprimé en radians. Il faut s’exercer à convertir des minutes ou secondes d’arc
L’approximation des petits angles, du type tan α ≈ α , suppose que l’angle soit
en radians ou l’inverse comme en TP. Rappelons que π rad correspondent à
exprimé en radians. Il faut s’exercer à convertir des minutes ou secondes d’arc
180°, que 1° est constitué de 60’ (minutes d’arc) et que 1’ est constituée de
en radians ou l’inverse comme en TP. Rappelons que π rad correspondent à
60’’ (secondes d’arc).
180°, que 1° est constitué de 60’ (minutes d’arc) et que 1’ est constituée de
60’’ (secondes d’arc).
Lorsqu’un objet est à l’infini (ou du moins à très grande distance par rapport à
la distance focale par exemple), il est interdit de le dessiner sur la figure ; tout
Lorsqu’un objet est à l’infini (ou du moins à très grande distance par rapport à
point de l’objet envoie alors des rayons parallèles entre eux (plus ou moins
la distance focale par exemple), il est interdit de le dessiner sur la figure ; tout
inclinés sur l’axe optique du système en fonction du point choisi).
point de l’objet envoie alors des rayons parallèles entre eux (plus ou moins
inclinés sur l’axe optique du système en fonction du point choisi).
Lorsque l’étude porte sur un système de deux lentilles disjointes par exemple,
l’image donnée par la première devient objet pour la seconde et l’application
Lorsque l’étude porte sur un système de deux lentilles disjointes par exemple,
successive de deux formules de conjugaison (avec origines différentes !)
l’image donnée par la première devient objet pour la seconde et l’application
conduit vite à une formule littérale lourde ; il faut dans ce cas préférer les
successive de deux formules de conjugaison (avec origines différentes !)
applications numériques intermédiaires et éviter de substituer une formule
conduit vite à une formule littérale lourde ; il faut dans ce cas préférer les
littérale dans l’autre.
applications numériques intermédiaires et éviter de substituer une formule
littérale dans l’autre.
Un objet virtuel pour un système optique S peut toujours être considéré
comme l’image réelle d’un système optique précédent S ′ . Le système S étant
Un objet virtuel pour un système optique S peut toujours être considéré
placé trop près de S ′ empêche les rayons de se couper réellement.
comme l’image réelle d’un système optique précédent S ′ . Le système S étant
placé trop près de S ′ empêche les rayons de se couper réellement.
L’unité pratique usuelle dans le commerce, pour les distances focales de
lentilles utilisées en TP ou celles des objectifs d’appareils photos, de
L’unité pratique usuelle dans le commerce, pour les distances focales de
projecteurs,…est souvent le millimètre ; s’en souvenir et convertir en mètre
lentilles utilisées en TP ou celles des objectifs d’appareils photos, de
avant l’application numérique.
projecteurs,…est souvent le millimètre ; s’en souvenir et convertir en mètre
avant l’application numérique.
L’unité de vergence est la dioptrie, symbole δ , qui s’identifie à 1 m −1 .
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
55.1
59:1
6925
2957
9
Le grandissement transversal est défini, de façon générale, par γ =
L’unité de vergence est la dioptrie, symbole δ , qui s’identifie à 1 m −1 .
caniq
$SSOLFDWLRQVGLUHFWHVGXFRXUV
$SSOLFDWLRQVGLUHFWHVGXFRXUV
e Mé
5pIOH[LRQ5pIUDFWLRQ
ure d
5pIOH[LRQ5pIUDFWLRQ
tiona
e Na
Écol
le Su
périe
21. Un rayon lumineux dans l’air tombe sur la surface d’un liquide ; il fait un angle
α = 56° avec le plan horizontal. La déviation entre le rayon incident et le rayon
21. Un rayon lumineux dans l’air tombe sur la surface d’un liquide ; il fait un angle
réfracté est θ = 13,5° . Quel est l’indice n du liquide ?
α = 56° avec le plan horizontal. La déviation entre le rayon incident et le rayon
réfracté est θ = 13,5° . Quel est l’indice n du liquide ?
&KDSLWUH
&KDSLWUH
22. Un réfractomètre de Pulrich est constitué d’un bloc de
verre de section rectangulaire d’indice N connu, sur
lequel on a déposé une goutte d’un liquide d’indice n
inconnu. On observe un faisceau de rayons parallèles à
1
la limite réfraction – réflexion totale et on mesure
l’angle α correspondant. On prend un indice théorique
de 1 pour l’air.
Établir l’expression de n en fonction de N et de α .
AN : Calculer n sachant que N = 1, 626 et α = 60°00′ .
Quelles sont les valeurs mesurables de n avec ce dispositif ?
6925
2957
9
α
59:1
N
55.1
23. Un disque en liège de rayon r flotte sur l’eau d’indice
n ; il soutient une tige placée perpendiculairement en son
centre.
Quelle est la longueur h de la partie de la tige non visible
pour un observateur dans l’air ? Citer les phénomènes
mis en jeu.
n
2320
:196
eau
.65.1
air
0753
582:
8891
24. Une personne de taille 1,80 m se tient debout devant une glace plane verticale.
Quelle hauteur minimale doit avoir cette glace pour que la personne s’y voie
entièrement ? Ce résultat dépend-il de la distance à laquelle se trouve la personne ?
Si la glace possède cette dimension minimale, à quelle hauteur convient-il de la
placer ?
iques
:211
25. Un rayon lumineux tombe sur un miroir plan ; le miroir tourne d’un angle α , de
combien tourne le rayon réfléchi ?
techn
/HQWLOOHVPLQFHV
Micro
Pour toutes les questions utiliser les relations données question 19..
ue e
t des
26. Construire l’image d’un objet réel (d’abord avant F puis après F) par une lentille
convergente. Interpréter le résultat en termes de faisceau. Reprendre avec un objet
virtuel.
caniq
27. Qu’observe-t-on lorsqu’on envoie un faisceau convergent sur une lentille divergente
(deux cas sont à distinguer : objet virtuel proche de la lentille, avant F, et objet
éloigné, après F) ?
système optique
J
A
le Su
x'
( L)
K
périe
(S)
ure d
e Mé
28. Image par un système optique suivi d’une lentille
O
x
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
M
N
a) Le système ( S ) est centré et stigmatique. Indiquer sur le schéma, la position de
l’image A1 du point A par le système optique ( S ) .
6925
2957
9
b) Le faisceau ( JK , MN ) est-il convergent ou divergent ?
c) Quelle est la proposition correcte :
• A1 est une image réelle pour ( S ) et un objet virtuel pour la lentille ( L)
• A1 est une image virtuelle pour ( S ) et un objet virtuel pour la lentille ( L)
59:1
• A1 est une image virtuelle pour ( S ) et un objet réel pour la lentille ( L)
:196
.65.1
55.1
d) Juste après avoir traversé la lentille ( L) , le nouveau faisceau
• sera nécessairement convergent
• sera nécessairement divergent
• peut être convergent, divergent ou parallèle
2320
e) Soit O le centre optique de la lentille ( L) , elle donne de l’image intermédiaire
A1 une image définitive sur l’axe optique x′x . Cette image A′ peut-elle se situer
8891
entre les points A1 et O ?
iques
:211
0753
582:
29. Déterminer graphiquement l’image donnée par une lentille mince sphérique
convergente, utilisée dans les conditions de Gauss, des objets plans,
perpendiculaires à l’axe optique orienté dans le sens de la lumière incidente (dans
les cas ci-dessous). Préciser dans chaque cas les caractéristiques de l’image obtenue
(c’est-à-dire réelle ou virtuelle, droite ou renversée, plus grande ou plus petite que
l’objet) :
objet réel avant le foyer objet et tel que : −∞ < OA < 2 f (attention f < 0 )
objet réel avant le foyer objet et tel que : 2 f < OA < f
techn
objet réel entre le foyer objet et le centre optique, tel que : f < OA < 0
ue e
t des
Micro
objet virtuel tel que : 0 < OA < +∞
Décrire l’évolution de l’image lorsque le point objet A décrit l’axe optique ; pour
cela s’aider des positions particulières de A : avant F, à 2 f ′ de O, en F, en O.
30. Dans le cas d’une lentille mince sphérique divergente, reprendre les constructions
comme à la question 29., en déterminant les divers cas intéressants.
périe
ure d
e Mé
caniq
31. L’objectif d’un appareil photographique est assimilé à une lentille convergente ( L)
de distance focale f ′ = 50 mm . La distance d entre ( L) et le capteur (C ) où se
forme l’image est variable pour permettre la mise au point. On désire photographier
des objets dont la distance à ( L) varie entre D = 0, 60 m et D → ∞ . Donner les
valeurs d min et d max correspondantes ; commentaire.
tiona
e Na
D ≥ 4 f′
Écol
Montrer qu’il faut
le Su
32. On souhaite projeter un objet lumineux AB sur un écran E placé à une distance D
de AB à l’aide d’une lentille convergente de distance focale f ′ .
; condition à retenir.
&KDSLWUH
6925
2957
9
Il y a alors deux positions possibles, distantes de d, pour la lentille ; en quoi
diffèrent-elles ? Il est conseillé de faire un seul schéma avec les deux situations.
Exprimer f ′ en fonction de D et d. Ce calcul correspond à la méthode de Bessel
utilisée en TP.
33. Un joaillier veut voir un petit diamant 5 fois plus grand qu’il n’est en réalité, et cela,
quand il le tient à 4, 0 cm derrière une loupe (équivalente à une lentille
convergente). Quelle doit être la distance focale de la loupe ?
.65.1
55.1
59:1
34. La Lune est vue sous un diamètre angulaire α = 31′ (minutes d’arc) ; convertir cet
angle en radians. On en fait l’image sur un écran à l’aide d’une simple lentille
convergente de distance focale f ′ = 50 cm . Où est placé l’écran et quel est le
diamètre de l’image ?
8891
2320
:196
35. Un objet virtuel est placé à 2, 0 cm d’une lentille divergente de distance focale
−3, 0 cm . Faire la construction de l’image à l’échelle et déterminer sa position ainsi
que le grandissement transversal, sur le dessin et par le calcul.
iques
:211
0753
582:
36. Vidéo projecteur
On désire projeter un objet lumineux AB sur un écran E placé à une grande
distance D de AB à l’aide d’une lentille convergente. Sachant que le
grandissement souhaité, en valeur absolue, est a = γ > 1 , exprimer la distance
focale f ′ en fonction des données.
AN : De l’objet à l’image, on souhaite passer de 3, 0 cm (taille de la matrice LCD) à
2, 0 m pour D = 5, 0 m ; que doit valoir f ′ ?
ue e
t des
Micro
techn
37. Principe d’une lunette astronomique
Une lunette est constituée de deux lentilles convergentes et l’objet est à l’infini, vu
sous un angle α petit. L’objectif ( f1′ = 1, 0 102 cm ) donne une petite image observée
à travers l’oculaire ( f 2′ = 2, 0 cm ) afin d’être vue à l’infini sous un angle α ′ .
Faire un dessin et donner le grossissement G = α ′ / α de la lunette. Cette lunette
astronomique peut-elle servir à des observations terrestres ? Expliquer.
caniq
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
e Mé
Pour certaines questions utiliser les relations données à la question 19..
périe
ure d
38. La phrase « Je te vois, donc tu me vois » illustre-t-elle correctement le principe du
retour inverse de la lumière ? Une glace sans tain suit-elle ce principe ?
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
39. Pour des jumelles d’une certaine taille, la distance entre les centres des objectifs
d’entrée est supérieure à la distance moyenne entre les deux yeux ; comment est-ce
possible ?
40. Un thermomètre à mercure est constitué d’une gaine cylindrique de mercure
remplissant un tube creux, coaxial, en verre. Pourquoi le diamètre apparent de la
gaine de mercure est-il supérieur à son diamètre réel ?
8891
2320
:196
.65.1
55.1
59:1
6925
2957
9
41. Un milieu « non homogène » possède un indice de réfraction variant d’un point à un
autre ; le milieu est dit stratifié en couches lorsque l’indice ne varie que suivant une
direction ( Oz par exemple) et donc qu’il reste néanmoins uniforme dans un plan
perpendiculaire (ici tout plan xy ). Quelle conséquence en déduit-on sur la trajectoire du rayon lumineux ?
* Un cristallisoir est rempli d’eau sucrée (le sucre a été déposé en grande quantité au
fond sans remuer). Un faisceau laser arrive dans cette solution ; montrer qu’il est
dévié, dans quel sens ?
* Comment l’indice de l’air évolue-t-il avec l’altitude terrestre ? Comment est alors
dévié un rayon pénétrant dans l’atmosphère ? Quel problème pose aux astronomes
cette réfraction atmosphérique pour la détermination des positions des étoiles ?
* Comment doit varier l’indice d’une fibre optique du centre vers le bord, pour
qu’un rayon puisse avoir une trajectoire d’allure sinusoïdale ? Intérêt ?
* Qu’appelle-t-on « mirage » ?
0753
582:
42. Expliquer le principe d’un dispositif optique simple (appelé « oeil de chat »)
constitué de trois miroirs plans perpendiculaires en forme de coin, et qui renvoie un
faisceau laser dans la direction incidente. Dans quel but un tel système a-t-il été
disposé sur la Lune lors de la première mission Apollo en 1969 ?
techn
iques
:211
43. Montrer qualitativement, avec les lois de la réfraction (sur les deux dioptres)
appliquées à des rayons (faire le dessin) venant parallèlement à l’axe, qu’une
lentille, formée de deux dioptres sphériques et à bord mince, fait converger le
faisceau vers l’axe optique ; justifier le nom d’une telle lentille. Et pour une lentille
à bord épais ?
Micro
44. Où converge un faisceau de rayons incidents parallèles, d’inclinaison quelconque
sur l’axe d’une lentille convergente ?
ue e
t des
45. En tenant compte de la nature ondulatoire de la lumière et des vitesses différentes en
fonction de l’indice, montrer qu’un faisceau de rayons parallèles arrivant sur un
dioptre plan, avec une incidence quelconque est réfracté suivant la loi de Descartes.
ure d
e Mé
caniq
46. Avec un système optique de type microscope ou viseur, on souhaite faire une
observation visuelle de l’image fournie ; doit-elle être réelle ou virtuelle ? Avec un
système optique du type projecteur, on souhaite observer la projection de l’image
par réflexion sur un écran ; doit-elle être réelle ou virtuelle ?
e Na
Écol
tiona
le Su
périe
47. Un laser est un faisceau lumineux cylindrique dont le diamètre est de l’ordre du
millimètre. Comment procéder pour élargir ce faisceau jusqu’à lui donner un
diamètre de quelques centimètres, en utilisant une lentille divergente et une lentille
convergente ?
&KDSLWUH
6925
2957
9
48. Pythéas fait la sieste après avoir posé ses lunettes à côté de lui sur l’herbe. Le Soleil
brille et au bout d’un certain temps, l’herbe s’enflamme. Pythéas cherche à
récupérer ses lunettes mais ne les voit pas car il est très myope (il ne voit que les
objets très proches). Commentaire !
49. Rappeler par des schémas le principe de la loupe, avec et sans accommodation pour
l’observateur (en expliquant ce que cela signifie).
55.1
59:1
50. L’œil myope a un cristallin trop convergent (l’image d’un objet lointain se forme en
avant de la rétine). Quel type de verres correcteurs faut-il prescrire à un myope qui
voit flou au delà de 2 m , avec quelle vergence exprimée en dioptries ?
:196
.65.1
51. L’œil est astigmate lorsque le cristallin n’est pas sphérique, par exemple lorsqu’il a
un rayon de courbure différent dans deux directions perpendiculaires de son plan
moyen. Montrer par un dessin qu’il n’existe plus alors de foyer image ponctuel,
d’où la gêne ; comment peut-on y remédier ?
8891
2320
52. L’ophtalmologiste, en faisant effectuer des tests de lecture « ZU » commence en
lumière blanche et finit toujours avec des filtres vert et rouge ; pourquoi ?
0753
582:
53. Quelle est la (distance) focale d’un objectif standard d’appareil photo numérique de
type reflex ? Donner les gammes de focales pour un grand angle, un téléobjectif.
Qu’est-ce qu’un zoom ? Et pour un smartphone ?
techn
iques
:211
54. La cellule ou capteur CCD (acronyme de Charged Couple Device = dispositif à
transfert de charge) d’un appareil photo numérique est une puce à 20 pattes de petite
taille : un rectangle de 8,8 mm sur 6, 6 mm pour un appareil de 4 MégaPixels.
Quelle est la taille du pixel (pour Picture Element = photosite), supposé de forme
carré ? Pourquoi doit-il être petit ?
Micro
([HUFLFHV
ue e
t des
Pour toutes les questions utiliser les relations données question 19..
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
e Mé
caniq
55. Lame à faces parallèles et stigmatisme (*)
a) Une lame à faces parallèles d’épaisseur e est constituée d’un verre d’indice n ;
elle est placée dans l’air, d’indice pris égal à 1. Construire le cheminement d’un
rayon arrivant sur le premier dioptre avec l’angle d’incidence i , on note r
l’angle de réfraction. Le rayon transmis par la lame est-il dévié par rapport au
rayon incident ? Comment appeler la modification subie ?
b) On considère un objet ponctuel A sur le rayon incident ; calculer « l’écart » entre
les rayons incident et transmis en fonction de e , i et r . À quelle condition
l’image A′ de A existe-t-elle ? Déterminer, dans ce cas, la relation de
conjugaison donnant AA′ en fonction de n et e .
c) Dans un parc aquatique, les aquariums ont une épaisseur de verre de 60 cm .
Situé à 20 cm devant la vitre, un visiteur observe un requin marteau nageant à
1, 0 m devant lui. À quelle distance le squale semble-t-il être pour l’observateur ?
(les indices de l’air, de l’eau et du verre sont respectivement : na = 1, 00 ,
ne = 1,33 et nv = 1, 50 ).
6925
2957
9
56. Étude graphique d’un doublet
Un doublet de deux lentilles minces L1 (convergente) et L2 (divergente), de centre
59:1
O1 et O 2 est représenté ci-dessous. Sur la gauche un rayon incident pénètre dans le
système et émerge sur la partie droite, la figure est à l’échelle 1/1.
.65.1
55.1
a) Trouver graphiquement la position des foyers principaux objet et image de
chaque lentille, notés respectivement F1 et F1′ pour L1 et F2 et F2′ pour L2 . On
fera clairement apparaître la construction graphique.
0753
582:
8891
2320
:196
b) Définir le foyer principal objet F et le foyer principal image F ′ de l’ensemble du
doublet. Déterminer graphiquement les positions de F et F ′ .
O2
Δ
Micro
techn
iques
:211
O1
ue e
t des
57. Appareil photographique
Un modèle simple d’appareil photogra- diaphragme
phique comprend :
– l’objectif, décrit comme une lentille
convergente de distance focale f ′ (elle
D
est appelée focale et notée f en
photographie)
– un diaphragme circulaire de diamètre
D , qui limite l’étendue du faisceau
lumineux admis dans l’appareil.
– un capteur photosensible constitué
d’une matrice de cellules ou pixels
(picture
element)
La
dimension
caractéristique des cellules est notée a .
capteur
e Mé
caniq
objectif
e Na
Écol
tiona
le Su
périe
ure d
O
(L)
appareil photo
&KDSLWUH
Dans un appareil photo numérique, le capteur est un capteur CCD (charge coupled
device) ou CMOS (complementary metal oxide semi-conductor) produisant un
courant dont l’intensité est fonction de la quantité de lumière reçue.
T(s) 1/4000 1/2000 1/1000
1/60
1/30
1/15 1/8
.65.1
55.1
59:1
6925
2957
9
a) Exposition : la quantité de lumière reçue par le capteur dépend de plusieurs
paramètres : de la luminosité de la scène, du diamètre D du diaphragme et de la
durée T pendant laquelle la lumière éclaire le capteur.
L’obturateur est un diaphragme devant le capteur de l’appareil photo, qui s’ouvre
plus ou moins longtemps, déterminant ainsi le temps de pose T , c’est-à-dire la
durée pendant laquelle le capteur va être soumis à la lumière.
Cette durée d’exposition T est indiquée généralement en secondes ou fractions
de seconde.
Les valeurs habituelles trouvées sur les appareils numériques sont les suivantes :
1/125
2
:196
1/500 1/250
1/4
1/2 1
2320
ŹDans quelles conditions doit-on choisir un temps de pose long ou court ?
1,4
2
2,8
4
5,6
8
11
iques
N
:211
0753
582:
8891
Le diaphragme devant l’objectif est constitué de plusieurs lamelles en métal qui,
ensemble, constituent une ouverture circulaire devant l’objectif. En photographie,
l’ouverture exprime la surface du diaphragme. Plus l’ouverture est grande, plus
l’énergie lumineuse reçue par le capteur est grande.
f′
On appelle nombre d’ouverture, la grandeur sans dimension définie par N =
.
D
Les valeurs successives de N sont prédéfinies sur les appareils numériques, les
valeurs les plus courantes sont :
16
22
32
caniq
ue e
t des
Micro
techn
Sur les objectifs photographiques, c’est en réalité le diamètre du diaphragme qui
est porté par des indications de type f N : f 2.8 , f 4 , f 11 etc.…
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
e Mé
Ainsi, si le photographe veut diminuer la surface du diaphragme, il doit
augmenter N : à une grande valeur de N correspond une petite « ouverture ».
ŹExpliquer pourquoi les nombres d’ouverture sont une suite géométrique de
raison 2 .
ŹUn photographe désire travailler avec une quantité de lumière constante
admise dans l’appareil. S’il augmente le nombre d’ouverture, doit-il augmenter
ou diminuer le temps de pose ?
6925
2957
9
b) Mise au point
La mise au point consiste à adapter la distance entre l’objectif et le capteur de
façon à obtenir une image nette de l’objet visé sur le capteur.
Un réglage possible consiste à placer le capteur dans le plan focal image de
l’objectif. On parle ici de mise au point à l’infini, pourquoi ?
55.1
59:1
La taille du capteur étant limitée, la focale a également une influence sur le
champ de l’image (c’est-à-dire l’angle maximal sous lequel on peut voir un objet
étendu à l’infini). Plus la focale est courte, plus l’angle de vue est important.
ŹMontrer qu’avec un capteur de dimension 24 mm sur 36 mm, le champ
photographié, avec une focale de 50 mm est d’environ 27° × 41° . Quel est le
champ avec un objectif de 135 mm de focale ?
(L)
8891
capteur
tache
F′
A'
0753
O
582:
D
A
2320
:196
.65.1
Considérons un point objet A situé à une distance L devant l’objectif. Lorsque
la mise au point est faite à l’infini, l’image A′ de A se forme derrière le capteur.
L’ensemble des rayons issus du point A forment alors une tache dans le plan du
capteur. Nous noterons d son diamètre.
iques
:211
f'
f ′D
.
L
La photographie du point objet A sera nette si le diamètre d reste inférieur à la
taille a d’une cellule photosensible. En déduire que, pour une mise au point à
l’infini, tous les objets situés au-delà d’une distance L0 seront photographiés de
Micro
techn
ŹMontrer que d =
ue e
t des
façon nette. Cette distance L0 est appelée distance hyperfocale. Exprimer L0 en
fonction D , a et f ′ , puis en fonction de a , f ′ et du nombre d’ouverture N .
périe
ure d
e Mé
caniq
c) Profondeur de champ
On suppose à présent que la mise au point de l’appareil est faite sur un objet A
situé à une distance L devant l’objectif. La distance objectif – capteur est donc
réglée de manière à ce que l’image A′ soit située sur le détecteur.
Comme dans la partie précédente, un point objet situé avant (ou après) A
formera une tache sur le détecteur. Si la taille de la tache est inférieure à celle des
cellules du capteur, les images traitées seront nettes.
On peut ainsi définir un intervalle [ A1 , A2 ] de positions d’un objet pour
e Na
Écol
tiona
le Su
lesquelles l’image apparaît nette. La distance A1 A2 est appelée profondeur de
champ.
&KDSLWUH
( L)
D
A2
A'
6925
2957
9
A
tache vérifiant le
critère de netteté
p
A1
capteur
F′
O
59:1
L
8891
2320
:196
.65.1
55.1
On peut montrer qu’une valeur approchée de la profondeur de champ est :
N
A1 A2 ≈ 2 a L2 2
f′
ŹPour une focale donnée, comment varie la profondeur de champ quand on
change l’ouverture ? Est-ce cohérent avec la distance hyperfocale calculée
précédemment ?
ŹPourquoi la profondeur de champ est-elle très importante pour le rendu de la
photographie ?
iques
:211
0753
582:
d) Utilisation
1) Pourquoi est-il plus difficile d’obtenir une photographie nette de nuit que de
jour ?
2) Sur la notice d’un appareil photo réflex numérique de grande marque, à
objectifs interchangeables, on peut lire :
Capteur : Type CMOS ; Taille 24 x 36 mm ; Nombre de pixels : 20,2 millions
Format d’image : 3:2
Obturateur : de 30 à 1/4000 s (par palier de 1/3 ou 1/2), pose longue.
techn
2.1) En supposant que les pixels sont carrés, déterminer l’ordre de grandeur de
a , la taille caractéristique du pixel.
Micro
On choisira pour la suite a = 6, 0 ȝm .
caniq
ue e
t des
2.2) En vacances, Monsieur L. veut photographier un paysage de montagne, avec
sa fille au premier plan. Il effectue une mise au point sur une crête située à
l’infini avec un objectif de focale 50 mm, ouvert à f 22 . Sa fille placée à 10 m
devant l’objectif, sera-t-elle nette sur la photo ?
ure d
e Mé
2.3) Il souhaite ensuite photographier une marmotte en visant la tête de l’animal
située à 15,0 m. Il utilise un objectif de focale 135 mm ouvert à f 2 . Calculer la
profondeur de champ. Ce choix de paramètres est-il pertinent (penser à la photo
en termes de qualité, de netteté, de luminosité et d’esthétique) ?
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
2.4) Sachant que l’on peut occulter exactement le disque lunaire avec une pièce
de 1 centime d’euro (diamètre 15 mm) placée à 1,6 m de l’œil, calculer, en
minute d’arc, le diamètre apparent θ du disque lunaire.
Avec un objectif de focale 135 mm, on photographie la pleine Lune, l’axe
optique de l’objectif étant dirigé vers le centre du disque lunaire. On effectue un
tirage sur du papier de format 10 cm x15 cm. Quel est le diamètre d du disque
lunaire sur le papier ?
2.5) Avec l’objectif de focale 50 mm, on fait la mise au point sur un coureur de
100 m, situé à L = 30 m , se déplaçant perpendiculairement à l’axe optique avec
6925
2957
9
une vitesse V = 36 km.h −1 . Quel temps de pose maximal (durée d’exposition)
peut-on choisir pour que le mouvement du coureur ne détériore pas la netteté de
la photographie ?
0753
582:
8891
2320
:196
.65.1
55.1
59:1
58. Réduction et agrandissement
Un objectif composé de trois lentilles, permet la formation de l’image d’un
document sur une surface photosensible. La reproduction du document, format A4,
peut être faite dans le même format ou dans un format A3 (surface double) ou dans
un format A5 (surface moitié). Ces réglages se font en modifiant les positions
respectives des lentilles à l’intérieur de l’objectif.
La distance document-récepteur est D = 384 mm ; on place une première lentille
mince divergente L1 , de distance focale image f 1′ = −90 mm , à d = 180 mm du
récepteur.
a) La lentille L1 peut-elle donner une image du document sur le récepteur ?
b) On ajoute alors une lentille mince L′ devant la lentille L1 à d = 180 mm du
document.
D
d
L′
L1
Δ
iques
O1
A′
récepteur
Micro
document
O′
techn
A
:211
d
e Mé
caniq
ue e
t des
1) La lentille L′ peut-elle être divergente ?
2) Quelle doit-être la distance focale image f ′ de la lentille L′ pour obtenir une
image réelle du document sur le récepteur ?
3) En déduire le grandissement γ 1 de l’association des deux lentilles et indiquer
le type de tirage réalisé : A4 en A3 ou A4 en A5.
c) En fait la lentille L′ est constituée de deux lentilles accolées L2 et L3 , L2 étant
identique à L1 . Calculer la distance focale image f 3′ de L3 . Quelle est la nature
de L3 ?
ure d
d) On glisse alors la lentille L3 afin de l’accoler à L1 . Montrer que l’image du
e Na
Écol
tiona
le Su
périe
document reste sur le récepteur et calculer le grandissement γ 2 correspondant à
cette nouvelle association, en déduire le type de tirage obtenu.
&KDSLWUH
59. L’œil
L’œil peut être modélisé, en première approximation, par une lentille convergente de
distance focale variant dans certaines limites (le cristallin) et par une surface
sensible analogue à un écran (la rétine).
6925
2957
9
Vision distincte
582:
8891
2320
:196
.65.1
55.1
59:1
L’œil voit nettement un objet lorsque l’image qu’en donne le cristallin se forme sur
la rétine. Pour qu’il en soit ainsi, l’œil « accommode » en faisant varier la courbure
du cristallin.
Lorsque l’œil n’accommode pas, un objet vu nettement est situé en un point appelé
Punctum Remotum (PR). Pour un œil normal, celui-ci se trouve à l’infini ; pour un
œil myope, il est plus rapproché.
L’accommodation permet de voir nettement des objets à distance finie : la distance
minimale d’observation correspond au Punctum Proximum (PP). Dans la suite on
note pp la distance séparant le PP du cristallin.
Un œil myope particulier est équivalent à une lentille convergente dont le centre
optique est à une distance δ = 1,52 cm du fond de l’œil. La distance focale vaut
f1 = 1,50 cm quand l’œil n’accommode pas et elle vaut f 2 = 1,37 cm lorsqu’il
accommode au maximum.
a) Faire un schéma avec un œil myope regardant un objet à l’infini ; commentaire.
b) Quelles sont les limites de vision distincte ? Comparer à un œil normal.
0753
Pouvoir séparateur
ue e
t des
Micro
techn
iques
:211
L’expérience montre que deux images ponctuelles a′ et b′ sur la rétine ne sont
différenciées par le cerveau que si elles sont écartées au moins d’une distance
minimum d . Les points objets correspondants ne sont donc différenciés que si
l’angle sous lequel l’œil les voit est supérieur à une valeur limite ε (le pouvoir
séparateur).
c) Sachant que ε est de l’ordre d’une minute d’angle (soit 3.10−4 rad ), déterminer
la distance minimale ab des deux points a et b que peut distinguer un œil
normal de pp = 25 cm ; quel est dans ce cas la distance focale f du cristallin et
la distance d = a′b′ des images ? Calculer également ab pour un œil myope de
pp = 7,5 cm et conclure.
périe
ure d
e Mé
caniq
60. Grossissement commercial d’une loupe
α est l’angle sous lequel est vu un petit objet à l’œil nu lorsqu’il est placé à la
distance minimale de vision nette (punctum proximum) pp = 25 cm . α ′ est l’angle
sous lequel est vue l’image à l’infini de ce même objet (donc sans accommodation)
à travers une lentille convergente de distance focale f ′ . Les angles sont
arithmétiques (non orientés).
Donner le grossissement commercial défini par Gc = α ′ / α .
Une loupe porte l'inscription ×4 ; quelle est sa distance focale f ′ ?
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
61. Le microscope
Le microscope permet d’observer des objets proches mais minuscules, qui ont un
diamètre trop petit pour être distingués à l’œil nu.
Principe
Un microscope peut être considéré comme un système de deux lentilles minces
convergentes :
– l’objectif, très convergent, de centre O1 , de distance focale f1′ = O1 F1′ = 4,0 mm
6925
2957
9
– l’oculaire, de centre O2 , de distance focale f 2′ = O2 F2′ = 4, 0 cm
centrés toutes les deux sur le même axe et distantes de D = O1O2
O1
59:1
B
O2
A F1
.65.1
55.1
x
8891
2320
:196
a) Représenter, sans respecter l’échelle, la marche d’un faisceau de 3 rayons issus
du point B d’un objet AB légèrement en avant de F1 ( A étant sur l’axe optique)
dans les deux cas suivants :
– la distance objectif – oculaire D est telle que l’image de AB donnée par
l’objectif (image intermédiaire A1 B1 ) se forme entre O1 et F2 ;
:211
0753
582:
– D est telle que A1 B1 se forme entre F2 et O2 .
Expliquer quel cas convient pour un microscope.
b) La distance D est fixée par construction à 20 cm . La mise au point se fait par
déplacement de l’ensemble objectif – oculaire par rapport à l’objet. Déterminer
les positions de l’image intermédiaire A1 B1 et de l’image finale A′B′ , repérées
iques
respectivement par O1 A1 et O2 A′ d’un objet se trouvant en A tel que
techn
O1 A = − 4,1 mm . Déterminer également le grandissement γ du système en
fonction des grandissements γ 1 et γ 2 de chaque lentille et faire l’AN.
Micro
Mise au point et profondeur de champ
ure d
e Mé
caniq
ue e
t des
Pour éviter à l’œil la fatigue de l’accommodation lors d’une observation qui peut
être longue, l’image A′B′ doit être à l’infini pour un œil normal.
c) Où doit se former l’image intermédiaire pour qu’il en soit ainsi ? Donner la
position de l’objet dans ce cas, au 1 1000 e de mm.
d) Déterminer la profondeur de champ maximale, c’est-à-dire la distance Δx entre
la position d’un objet vu sans accommoder et celle d’un objet vu en
accommodant au maximum pour un œil normal (PR à l’infini, pp = 25 cm ),
placé en F2′ foyer principal image de l’oculaire. Conclure, compte tenu de la
valeur numérique de Δx , sur la façon de mettre au point avec un microscope.
Puissance et grossissement (ces grandeurs sont prises positives)
e Na
Écol
tiona
le Su
périe
On définit la puissance d’un microscope par la quantité P = α ′ / AB , α ′ étant le
diamètre apparent de l’image finale (c’est-à-dire l’angle sous lequel on la voit) et
AB la dimension de l’objet ( P est exprimée en dioptries).
&KDSLWUH
6925
2957
9
e) Refaire une construction à 3 rayons faisant apparaître α ′ , dans le cas de la vision
à l’infini. Calculer Pi (puissance intrinsèque) définie comme la puissance dans le
cas de la vision à l’infini. Application numérique.
On définit le grossissement par G = α ′ / α , rapport des diamètres apparents à travers
le microscope en vision à l’infini et à l’œil nu au Punctum Proximum.
f) Relier G à Pi et pp . Application numérique pour l’œil de pp = 25 cm .
8891
2320
:196
.65.1
55.1
59:1
62. Lunette astronomique
On représente une lunette astronomique par deux lentilles minces convergentes :
l’objectif L1 de focale f 1′ = 80 cm , diamètre D = 60 mm , et l’oculaire L2 de
focale f 2′ = 6, 0 mm .
La lunette est réglée à l’infini (c’est-à-dire qu’elle donne d’un objet à l’infini une
image à l’infini).
a) Quelle est la distance h entre L1 et L2 ? Quel est l’intérêt de ce réglage ?
b) Représenter sur un schéma, sans respecter l’échelle, le devenir d’un rayon
incident faisant un angle α avec l’axe optique et émergeant sous un angle α ′
dans les conditions de Gauss.
α′
c) Déterminer l’expression du grossissement angulaire G =
de la lunette en
α
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
fonction de f 1′ et f 2′ .
d) Au moment de l’observation : la distance Terre-Mars est égale à 7,0.107 km,
diamètre de Mars 6 800 km ; la distance Terre-Lune est égale à 3,8.105 km,
diamètre de la Lune 3 400 km . Si on estime l’angle maximal sous lequel
l’observateur voit l’image, à environ 30°, cet observateur voit-il Mars en entier ?
Même question pour la Lune.
e) Tous les rayons incidents qui pénètrent dans l’objectif de la lunette donnent des
rayons émergents qui, à la sortie de l’instrument, passent à l’intérieur d’un cercle
appelé « cercle oculaire » ; montrer qu’il s’agit de l’image de l’objectif par
l’oculaire.
1) Établir la relation qui lie le diamètre d du cercle oculaire, le diamètre D de
l’objectif et le grossissement G.
2) Quelle est la position du cercle oculaire par rapport à l’oculaire ?
3) Où faut-il placer l’œil pour avoir une observation optimale ? Quelle taille
maximale le cercle oculaire ne doit-il pas dépasser a priori, lors d’une observation visuelle ?
f) Lorsqu’on observe une étoile à l’aide de la lunette, l’image paraît ponctuelle.
Quel est alors l’intérêt de la lunette ?
4XHVWLRQVRXYHUWHV
63. Trajet boomerang d’un rayon lumineux
Un point source S émet de la lumière dans
une boîte parallélépipédique aux parois
intérieures réfléchissantes.
Construire avec précision (aucune mesure
d’angle, aucun calcul) le trajet d’un rayon
dans le plan de la figure qui revient à S après
une réflexion sur chacun des trois côtés de la
boîte.
S
6925
2957
9
10 mm
40 mm
plage
• B
I
8891
2320
:196
mer
A •
582:
64. Trajet optimisé entre deux points (*)
A est sur la plage et B dans la mer ; B est en
train de se noyer et appelle au secours, A décide
de se porter à sa rencontre au plus vite. Sachant
que A court sur la plage à la vitesse v1 et nage
dans l’eau à la vitesse v2 < v1 , comment doit-il
choisir le point I sur le bord ?
.65.1
55.1
59:1
30 mm
iques
:211
0753
65. Grandissement imposé
Comment déterminer graphiquement, pour une lentille convergente, le couple de
points conjugués, pour un grandissement transversal donné, par exemple γ = 2 ?
Même question avec une lentille divergente.
ue e
t des
Micro
techn
66. Réduction d’un faisceau laser
Le diamètre d’un faisceau laser parallèle incident de D = 2, 0 mm est jugé trop
grand et doit passer pour le faisceau parallèle émergent en sortie, à d = 0,1 mm .
Proposer un dispositif optique comportant deux lentilles minces convergentes de
même axe optique espacées de e = 21, 0 cm . Quelle est la valeur numérique des
deux distances focales f1′ et f 2′ à utiliser ?
Estimer la divergence des deux faisceaux sachant que le laser a pour longueur
d’onde λ = 632,8 nm ; conclusion.
e Mé
caniq
67. Utilisation inhabituelle d’une lunette (*)
Que voit-on dans une lunette astronomique réglée à l’infini, comme par exemple
celle de la question 62., si on vise à distance finie ? Et si on la tient à l’envers ?
e Na
Écol
tiona
le Su
périe
ure d
68. Comment allumer un feu avec de la glace ?
Un homme a réussi à créer du feu avec un bloc de glace. Il a travaillé l’élément pour
lui donner les mêmes propriétés qu’une loupe ; le bloc de glace est assimilé à une
demi-sphère de rayon R = 7 cm (on parle de lentille plan convexe ou demi-boule).
Dans les conditions de Gauss, à quelle distance doit-il positionner le centre O de la
lentille par rapport à la paille à embraser ?
&KDSLWUH
6925
2957
9
59:1
55.1
.65.1
:196
n
582:
8891
2320
O
0753
Données : La glace est un milieu d’indice de réfraction n = 1, 33 .
iques
:211
7UDYDX[SUDWLTXHV
0,09 0,195 0,34
0,065 0,1 0,235
0,50
0,34
0,64
0,44
caniq
0
0
0,765
0,51
0,87
0,59
0,94
0,64
e Mé
sin i
sin r
ue e
t des
Micro
techn
69. La vérification expérimentale de la loi de Descartes sur la réfraction est conduite
avec un dioptre air / plexiglas ; l’étude doit permettre une mesure de l’indice du
plexiglas.
Le matériel utilisé est assez rudimentaire : disque optique (voir la partie vérification
d’une loi physique du chapitre 0) et un hémi cylindre de plexiglas. Le point
d’incidence est le centre du disque où se trouvent les graduations. L’incidence i
varie par rotation du disque, ce qui permet le relevé des valeurs expérimentales de i
(angle d’incidence) et r (angle de réfraction). Ci-dessous directement les valeurs de
sin i et sin r :
ure d
Faire une étude graphique des données expérimentales, conclure sur la loi de
Descartes et donner une mesure de l’indice du plexiglas avec son incertitude.
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
70. On dispose d’une lentille non marquée ; comment savoir si elle est convergente ou
divergente ?
71. Un objet de petite taille (miroir d’un Michelson d’environ 2 cm ) doit être projeté
sur un écran à distance fixe (environ 1,50 m ). Laquelle des deux lentilles marquées
100 mm ou 200 mm en donne le meilleur grandissement ?
59:1
6925
2957
9
72. Méthode d’autocollimation. On accole une lentille mince convergente de distance
focale f ′ et un miroir plan. On éclaire ce dispositif au moyen d’un petit objet
lumineux. Montrer que lorsque celui-ci est à une distance f ′ du dispositif, l’image
se forme dans le plan de l’objet. À quoi sert cette méthode ?
2320
:196
.65.1
55.1
73. Méthode de Bessel
Pour la mesure de la distance focale d’une lentille convergente, on peut utiliser la
méthode d’autocollimation (mesure unique) ou les relations de conjugaison
(traitement graphique possible), ces deux méthodes présentent une erreur
systématique liée à la position inconnue du centre optique de la lentille réelle
(d’épaisseur non nulle). On mesure en effet les distances objet-lentille et écranlentille, en considérant une référence pour la position de la lentille systématiquement
décalée par rapport au centre optique inaccessible.
objet
8891
réf. lentille
582:
écran
0753
centre optique
réf. lentille 2
centre optique
techn
réf. lentille 1
iques
:211
Dans la méthode de Bessel (voir la question 32.), on mesure la distance entre deux
positions de la lentille (le décalage systématique se simplifie dans la différence).
L’autre mesure est la distance écran-objet qui ne présente pas ce problème.
centre optique
écran
Micro
objet
d
ue e
t des
d
D2 − d 2
4D
e Mé
f′=
caniq
Pour D > 4 f ′ , si d est la distance entre les deux positions possibles de la lentille :
70
31,5
80
42,6
90
54,3
périe
60
15,6
100
66,2
120
86,6
130
97,1
le Su
D (cm)
d (cm)
ure d
Une série de mesure permet un traitement statistique.
Ci-dessous des mesures expérimentales :
e Na
Écol
tiona
Comment la relation de Bessel peut-elle être validée graphiquement ?
Encadrer la distance focale par un traitement statistique.
&KDSLWUH
6925
2957
9
74. Une lentille convergente donne d’un objet O , sur un écran E , une image nette et
plus grande que l’objet. L’écran est déplacé de telle façon à augmenter la distance
OE ; de quel côté (sans calcul) faut-il déplacer la lentille pour retrouver l’image ?
Est-elle plus grande ou plus petite que la précédente ?
59:1
75. Quelles méthodes peut-on proposer pour mesurer la distance focale d’une lentille
convergente ? Quelles sont les avantages et inconvénients de chacune de ces
méthodes ? Comment procéder pour mesurer la distance focale d’une lentille
divergente ?
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
55.1
76. Est-ce une bonne idée en focométrie de diaphragmer la lentille pour améliorer le
stigmatisme et la précision des mesures en augmentant la netteté des images ?
ue e
t des
caniq
e Mé
ure d
périe
le Su
tiona
e Na
Écol
582:
0753
:211
iques
techn
Micro
:196
2320
8891
.65.1
55.1
59:1
6925
2957
9
6925
2957
9
5pSRQVHVDX[TXHVWLRQV
/HFRXUVG·DERUG
55.1
59:1
'pILQLWLRQVHWORLVGHO·RSWLTXHJpRPpWULTXH
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
2. Pour être dans le cadre de l’optique géométrique, il faut que les dimensions des
systèmes étudiés soient très grandes devant la longueur d’onde de la lumière
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
1. La puissance lumineuse transportée et la nature spectrale (ou « couleur »). La
lumière peut être décrite comme une onde (électromagnétique). Si l’onde est
sinusoïdale (on dit harmonique), elle est caractérisée par sa pulsation
2π
, où f est la fréquence et T la période.
ω = 2π f =
T
Les sources lumineuses émettent en général une superposition d’ondes de
différentes fréquences ou pulsations.
L’œil distingue les ondes lumineuses de pulsations différentes sous forme de
couleurs différentes. Pour cette raison la lumière composée d’ondes de même
pulsation est appelée monochromatique.
Les ondes électromagnétiques se propagent dans le vide à la vitesse
c ≈ 3.10 8 m.s −1 . Dans un milieu matériel transparent une onde lumineuse se
propage à une vitesse inférieure qui dépend de sa pulsation. Par définition la
longueur d’onde (période spatiale) est λ = vT où v est la vitesse de l’onde. La
longueur d’onde dépend donc non seulement de la pulsation de l’onde
monochromatique, mais aussi du milieu dans lequel elle se propage !
La caractéristique spectrale est donc fondamentalement la pulsation, néanmoins on
utilise souvent pour cette caractéristique la longueur d’onde dans le vide (en
imposant donc le milieu). Ceci est quasi systématique en optique géométrique où les
longueurs d’onde dans le vide sont souvent appelées longueurs d’onde, et servent à
décrire la caractéristique spectrale de l’onde lumineuse.
L’œil n’est sensible qu’aux λ ∈ [ 400 nm ,800 nm ] , 400 nm correspondant sensiblement au violet et 800 nm au rouge (1 nm = 10–9 m). Il s’agit de valeurs numériques
de longueurs d’onde dans le vide.
Ceci ne correspond qu’à une très petite partie du spectre. En dessous de 400 nm on a
le domaine de l’ultraviolet et au-dessus de 800 nm le domaine de l’infrarouge.
Le maximum de sensibilité de l’œil correspond à λ = 560 nm (jaune-vert).
La superposition de tous les λ visibles donne une lumière blanche. Mais à l’inverse
avec seulement quelques λ répartis sur le spectre visible, la lumière apparaît à l’œil
comme blanche.
En optique géométrique, sauf indication contraire de l’énoncé, la lumière est
monochromatique.
6925
2957
9
( λ ≈ 0,5 ȝm ) soit typiquement d ≥ 1 000λ ≈ 0,5 mm ; c’est le cas des systèmes
optiques usuels (lentilles, prisme, …) qui mesurent toujours plusieurs cm. L’optique
géométrique ne s’applique pas lorsque la lumière passe par une fente très fine (il se
produit alors un phénomène de diffraction) ou lorsqu’elle traverse une solution avec
particules (diffusion).
v=c n
3. La vitesse de la lumière dans un milieu transparent est
−1
où
c = 300.000 km / s = 3, 0 10 m.s est la vitesse de la lumière dans le vide et n
l’indice du milieu (sans unité) aussi appelé indice de réfraction (plus n est grand,
plus le milieu est dit réfringent). Comme v ≤ c , on a toujours n ≥ 1 .
La vitesse et donc l’indice dépendent de la pulsation de l’onde : l’indice n dépend de
la longueur d’onde (sous-entendu dans le vide).
.65.1
55.1
59:1
8
8891
2320
:196
4. Dans un milieu homogène, la lumière se propage en ligne droite. Un rayon lumineux
matérialise la trajectoire de l’énergie lumineuse entre deux points de l’espace ; c’est
un concept théorique : limite d’un faisceau dont la section est très petite (on parle
aussi de pinceau lumineux, comme avec un laser). En cas de réflexion(s) ou de
réfraction(s), le rayon lumineux est constitué d’une suite de segments de droite (en
considérant une propagation en ligne droite dans des milieux homogènes).
iques
:211
0753
582:
5. On appelle dioptre la surface polie (irrégularités de la surface inférieures à λ )
séparant deux milieux d’indices différents, par exemple le dioptre plan qui sépare un
plan d’eau (très) calme et l’air, le dioptre sphérique qui sépare une lentille en verre
et l’air… Le plan d’incidence en un point d’un dioptre est le plan défini par le rayon
incident en ce point et la normale au dioptre en ce point.
techn
6. 1ère loi de Descartes : les rayons réfléchi et réfracté sont
dans le plan d’incidence, de l’autre côté de la normale
par rapport au rayon incident.
– pour la réflexion :
r = − i1
– pour la réfraction :
n1 sin i1 = n2 sin i2
ue e
t des
Micro
2e loi de Descartes : (les angles sont orientés par rapport
à la normale, algébriquement suivant le sens indiqué)
⊕
r
i1
I
n1
i2
n2
périe
ure d
e Mé
caniq
Pour cette dernière relation :
n2 > n1 sin i2 < sin i1 (si i1 et i 2 sont positifs) ou plus généralement i2 < i1 ,
soit :
« En passant dans un milieu plus réfringent, le rayon se rapproche de la normale »,
c’est le cas sur la figure.
L’optique géométrique ne prévoit pas les intensités lumineuses relatives des
faisceaux réfléchi et réfracté par rapport au faisceau incident.
le Su
7. Supposons n2 > n1 (les rayons se rapprochent de la normale) et considérons i1 et i 2
e Na
Écol
tiona
positifs ; lorsque i1 passe de 0 à π / 2 , i2 passe de 0 à il avec
sin il = n1 / n2 < 1 :
&KDSLWUH
n1
il est l’angle de réfraction limite.
Si maintenant la lumière vient du milieu 2
vers le milieu 1 (les rayons s’écartent de la
normale), le passage peut se faire tant que
2
il
i2 < il (rayon 1), mais pour un angle
d’incidence supérieur à l’angle limite (rayon
3), le rayon ne sort plus du milieu 2 : le dioptre se comporte comme un miroir, il y a
réflexion totale (avec r = − i2 ), on utilise le qualificatif totale par opposition à la
réflexion partielle qui existe toujours.
59:1
6925
2957
9
n
.65.1
55.1
La réflexion totale ne peut se produire que lors du passage dans un milieu moins
réfringent, elle se produit dès que l’angle d’incidence dépasse il .
2320
:196
Applications : la fibre optique, la fontaine lumineuse, et pour l’interface verre / air
( il = 42° < 45° ), le prisme à réflexion totale (périscope, jumelles, viseur d’appareil
photo…).
8891
)RUPDWLRQG·LPDJHV
A A′
le Su
périe
ure d
e Mé
caniq
Dessin de gauche : A est un objet réel et A′ est une image virtuelle (observable à
l’œil mais non projetable).
Dessin de droite : A est un objet virtuel et A′ est une image réelle (peu observable à
l’œil mais projetable).
Ces définitions peuvent être mises en défaut si un second système est placé après le
système étudié. Supposons que pour le système étudié, A′ soit une image réelle, et
qu’un second système, placé derrière le système étudié ait sa face d’entrée avant le
point A′ : les rayons ne se coupent plus en A′ , mais seulement leurs prolongements.
Pourtant A′ reste une image réelle du système étudié et se comporte comme un
objet virtuel pour le second système.
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
Il est plus sûr d’utiliser les définitions suivantes, pour un système dioptrique :
Un objet est réel s’il se trouve avant la face d’entrée, virtuel s’il est après.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
A′
ue e
t des
A
Micro
techn
iques
:211
0753
582:
8. Un point objet est un point de rencontre des rayons lumineux (ou de leurs
prolongements) arrivant sur le système (les rayons incidents). Un point image est un
point de rencontre des rayons lumineux (ou de leurs prolongements) ressortant du
système (les rayons émergents).
Il faut pour cela suivre les rayons dans le sens de la propagation de la lumière (c’està-dire en général de gauche à droite).
Lorsque les rayons se rencontrent effectivement, on dit que le point objet ou point
image est réel. Lorsque seuls les prolongements des rayons se rencontrent, on dit
que le point objet ou point image est virtuel.
Une image est réelle si elle se trouve après la face de sortie, virtuelle si elle est
avant.
6925
2957
9
Les définitions s’appliquent à un système avec miroir (catadioptrique), lorsque la
face d’entrée est aussi la face de sortie.
59:1
9. C’est un système centré.
Un rayon arrivant suivant l’axe optique n’est pas dévié (ni décalé). En effet au point
d’intersection avec l’axe optique, dioptres et miroirs du système ont pour normale
l’axe optique Δ lui-même.
Δ
:196
.65.1
55.1
10. a) Si la source ponctuelle est à l’infini sur l’axe,
le système reçoit un faisceau de rayons
parallèles et parallèles à l’axe optique.
L’étendue de ce faisceau est arbitrairement
grande.
Δ
582:
8891
2320
b) Si la source ponctuelle est à l’infini en
dehors de l’axe, c’est le cas précédent avec
une rotation du système. Le système reçoit
un faisceau de rayons parallèles, inclinés sur
l’axe optique d’un angle égal à l’angle entre
l’axe optique et la ligne de visée.
iques
:211
0753
c) Source étendue à l’infini (exemples : le Soleil, la Lune). On la considère comme
un ensemble de sources ponctuelles. Le système reçoit un ensemble de faisceaux
parallèles, d’inclinaisons comprises, par exemple, entre 0 et α (source au-dessus
de l’axe, base sur l’axe) ou entre − α 2 et + α 2 (source centrée sur l’axe), si α
est l’angle sous lequel on voit la source étendue.
ue e
t des
Micro
techn
11. Un système optique est rigoureusement stigmatique pour le couple de point A et A′
si tout rayon passant par A avant traversée du système passe par A′ après cette
traversée : on dit alors que les points A et A′ sont conjugués par rapport au
système.
Si A est un point objet, A′ , conjugué de A, est appelée image de A.
Un système optique centré et stigmatique (tout point objet a une image) est
aplanétique si l’image d’un objet plan, perpendiculaire à l’axe optique, est plane et
également perpendiculaire à l’axe.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
12. Même s’il y avait stigmatisme du point de vue de l’optique géométrique, les
propriétés ondulatoires de la lumière font que les « images » ne sont pas
rigoureusement ponctuelles, mais sont des taches de diffraction. Par ailleurs le
pouvoir de résolution de l’œil (lié à la taille des cellules rétiniennes) ou la taille des
pixels du capteur d’un appareil numérique font que l’on peut se contenter d’un
stigmatisme approché (voir cette notion sur l’exemple du dioptre plan, question 14.
et dans l’exercice sur l’appareil photo, question 57.).
Dans les conditions de Gauss, les rayons coupent les dioptres près de l’axe optique
et les inclinaisons des rayons sur l’axe sont faibles.
&KDSLWUH
On peut se placer dans ces conditions, en limitant les dimensions de la face d’entrée
du système, autour du point d’intersection avec l’axe optique, grâce à un
diaphragme.
6925
2957
9
0LURLUVSODQVHWGLRSWUHVSODQV
59:1
13. Un miroir plan est rigoureusement stigmatique : tout rayon passant par un point
objet A, « passe » après réflexion par un même point A′ . Le point A′ est l’image de
A, il est symétrique de l’objet par rapport au miroir :
55.1
OA′ = − OA
582:
A′
A′
0753
O
8891
B′
B
A
2320
:196
.65.1
L’invariance par translation le long du miroir assure l’aplanétisme avec un
A′B′
=1
grandissement : γ =
AB
A
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
14. Sur la figure ci-contre, on a n′ > n (le rayon 2
s’écarte de la normale). O est le point du dioptre
θ′
n′
sur la normale au dioptre passant par le point
O
objet A . La recherche d’un point image éventuel
I
n
se fait sur cette normale car le rayon 1 issu de A
′
θ
et arrivant sur le dioptre sous incidence normale
θ
A′ θ
n’est pas dévié. Le rayon d’inclinaison θ
recoupe, après réfraction, la normale au point A′ .
A
Le point A′ n’est pas l’image de A, un rayon issu
de A et d’inclinaison différente de θ , recoupe la
normale en un point différent de A′ . La position du point A′ dépend de la position
du point A mais aussi de l’angle θ ! Le dioptre plan n’est pas stigmatique.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
techn
iques
:211
Sur le schéma de gauche A est un objet réel, son image A′ est virtuelle ; le faisceau
divergent issu de A continue de diverger après réflexion sur le miroir en semblant
provenir de A′ (c’est le principe de l’éclairage indirect). Sur le schéma de droite A
est un objet virtuel, son image A′ est réelle ; le faisceau convergent continue de
converger après réflexion sur le miroir (miroir de renvoi pour l’observation latérale
à l’extrémité d’un télescope par exemple).
Dans tous les cas, objet et image sont de nature différente.
OI
tan θ
= OA
. Or la loi de Descartes en I ,
tan θ ′
tan θ ′
n sin θ = n′ sin θ ′ , montre que le rapport des sinus étant constant, le rapport des
tangentes ne l’est pas ; ce qui confirme l’étude précédente. Cependant si les angles
tan θ sin θ n′
d’incidence θ et de réfraction θ ′ sont assez petits,
≈
= . Il vient
tan θ ′ sin θ ′ n
n′
alors OA′ = OA , la position de A′ ne dépend plus du rayon choisi, tous les
n
rayons issus de A passent par A′ : il y a stigmatisme approché si les rayons sont peu
inclinés sur la normale. Cette normale joue le rôle d’un axe optique et on retrouve
une partie des conditions de Gauss pour le stigmatisme approché. La relation de
conjugaison du dioptre plan est dans ces conditions :
.65.1
55.1
59:1
6925
2957
9
Précisons par le calcul : OA′ = −
:196
OA′ OA
=
n′
n
techn
iques
:211
0753
582:
8891
2320
15. n = 1,3 est l’indice de l’eau, n′ = 1, 0 celui de l’air.
L’observateur, s’il est loin de O, voyant une ombre,
n′
se rapproche naturellement du point O pour avoir
O
une « meilleure image » et les rayons reçus par son
œil sont alors peu inclinés sur la normale. Les
n
conditions du stigmatisme approché sont réalisées.
θ′
La relation de conjugaison du dioptre plan,
A′ θ
B′
OA′ OA
=
donne une profondeur apparente
n′
n
A
B
OA′ = 0, 75 OA , donc un objet à une profondeur
réelle de 40 cm sous l’eau est « vu » (en fait son image) dans l’air à une profondeur
apparente de 30 cm (l’effet de contraction des jambes dans une piscine, la pêche
aux moules, l’expérience de la règle brisée,…).
ue e
t des
A′B′
=1
AB
γ=
Micro
L’invariance par translation le long du dioptre conduit à un grandissement linéaire :
caniq
Mais l’image, plus proche, est vue sous un angle plus grand, elle apparaît donc plus
grosse que l’objet, on peut parler de grossissement angulaire par :
G = θ ′ / θ = n / n′ = 1,3
e Mé
/HVOHQWLOOHVPLQFHV
le Su
périe
ure d
16. Une lentille sphérique est dite mince (modèle théorique) si son épaisseur est très
petite, notamment devant les rayons de courbure des deux dioptres sphériques qui la
constituent. Alors un rayon passant par son centre optique O (quasiment confondu
avec son centre) n’est pas dévié (la très faible translation est négligeable).
e Na
Écol
tiona
L’expérience, avec une lentille réelle, montre que les rayons parallèles et parallèles à
l’axe, provenant d’un point objet à l’infini sur l’axe, ne se recoupent pas en un
&KDSLWUH
même point après traversée de la lentille. Ce qui établit l’astigmatisme de la lentille
(même si elle se comporte comme une lentille mince).
59:1
6925
2957
9
Cependant, si en diaphragmant, on ne laisse passer que les rayons proches de l’axe,
alors tous les rayons émergents se recoupent quasiment en un même point. Ce qui
établit expérimentalement un stigmatisme approché. Le « point » image obtenu, sur
l’axe est par définition le foyer principal image.
Expérimentalement on constate pour les lentilles minces un stigmatisme et un
aplanétisme approchés dans les conditions de Gauss, pour tous les points objet sur
l’axe ou proches de l’axe.
techn
iques
:211
0753
582:
8891
2320
:196
.65.1
55.1
Il existe deux types de lentilles minces : convergente et divergente.
Les foyers dont l’existence n’a de sens que dans le cadre du stigmatisme approché,
sont définis par :
Le foyer image F ′ est le point conjugué d’un point objet à l’infini sur l’axe, c’est-àdire que des rayons incidents parallèles à l’axe donnent des rayons émergents
passant par F ′ .
Le foyer objet F est le point conjugué d’un point image à l’infini sur l’axe, c’est-àdire que des rayons incidents passant par F donnent des rayons émergents
parallèles à l’axe.
Les foyers, lorsque le milieu de propagation de part et d’autre est le même, sont
symétriques par rapport au plan de la lentille : OF ′ = − OF . Pour une lentille
convergente les foyers image et objet sont réels ; ils sont virtuels pour une lentille
divergente.
La distance focale (image) est définie par f ′ = OF ′ ; elle est donc positive pour
une lentille convergente et négative pour une lentille divergente (en orientant l’axe
optique dans le sens de la lumière incidente).
1
Pour une lentille mince la vergence est définie par V =
elle s’exprime en
f′
ure d
e Mé
caniq
ue e
t des
La détermination de l’image d’un point par une lentille ne peut pas se faire avec les
lois de Descartes sur les deux dioptres qui la constituent, car cela conduit à
l’astigmatisme ! Si on essaie de faire un tracé dans les conditions de Gauss, alors les
angles très petits conduisent à une très grande imprécision.
Pour la détermination théorique des images dans le cadre du stigmatisme, on utilise
une construction géométrique qui s’appuie sur la notion de foyers et de centre
optique. Dans le cadre de cette construction les lentilles doivent être représentées
par un segment sans épaisseur.
F′
O
F′
F
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
F
périe
O
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
m −1 ou dioptrie ( δ ). En orientant l’axe optique dans le sens de la lumière incidente,
la vergence d’une lentille convergente est positive.
17. Les traits de la construction géométrique sont souvent, de façon abusive, appelés
rayons. On trace donc le cheminement théorique (lentille stigmatique) de deux
rayons issus d’un point objet, leur intersection après traversée donnant la position de
l’image. Les « rayons » particuliers utilisés sont :
59:1
6925
2957
9
Ź Tout rayon passant par le centre optique O n’est ni dévié ni décalé.
Ź Tout rayon incident parallèle à l’axe optique passe par le foyer principal
image F ′ après traversée ou en semble issu.
Ź Tout rayon incident « passant » par le foyer principal objet F est parallèle à
l’axe optique après traversée.
F ′ A′
A
Δ
.65.1
O
55.1
B
F
:196
B′
8891
2320
Si le point objet est sur l’axe, les trois rayons particuliers sont confondus avec l’axe
et ne peuvent être utilisés. On se sert alors de la notion de foyer secondaire et un
seul rayon suffit car l’image est sur l’axe (voir la question 18.).
techn
iques
:211
0753
582:
18. La construction utilise la notion de foyer secondaire objet ou image. Il y a deux
possibilités dont la première est la plus courante :
– un rayon passant par O et parallèle au rayon considéré ; non dévié il recoupe le
plan focal image au foyer secondaire image cherché. L’émergent passe par ce
foyer secondaire.
– le rayon incident coupe le plan focal objet en un foyer secondaire par lequel passe
un rayon non dévié car passant par le centre optique O. L’émergent est parallèle à
ce rayon.
Δ
F′
F
Micro
O
F′
ue e
t des
F
Δ
O
caniq
19. L’axe optique est orienté dans le sens de la lumière incidente, ainsi que l’axe
orthogonal à Δ ( AB est algébrique). Alors x < 0 désigne un objet réel, x > 0 un
objet virtuel, x′ > 0 une image réelle et x′ < 0 une image virtuelle.
Si γ < 1 l’image est plus petite que l’objet
ure d
Si γ > 1 l’image est plus grande que l’objet
e Mé
Si γ > 0 l’image est droite (dans le même sens que l’objet)
Si γ < 0 l’image est renversée
A′B′ OA′
=
AB
OA
e Na
Écol
tiona
le Su
périe
L’image est homothétique de l’objet par rapport au centre O : γ =
&KDSLWUH
6925
2957
9
20. Dans tous les cas, la 1ère lentille donne d’un objet A une image intermédiaire Ai qui
sert d’objet à la 2ème lentille ; l’image définitive est A′ . Les formules de conjugaison
successives sont :
1
1
1
1
1
1
et
−
=
−
= .
O1 Ai O1 A f1′
O2 A′ O2 Ai f 2′
Ź Dans le cas des lentilles minces accolées, on a O1 ≈ O2 noté O ; alors la somme
membre à membre des deux formules précédentes donne :
55.1
59:1
1
1
1 1
1
−
= +
=
OA′ OA f1′ f 2′ f ′
2320
:196
.65.1
Ceci est la formule de conjugaison d’une lentille mince équivalente de distance
focale f ′ . Dans ces conditions ce sont les inverses des distances focales qui
s’additionnent, soit en posant V = − 1 f = 1 f ′ (c’est la vergence exprimée en
dioptries) :
V = V1 + V2
F1′ F2
techn
O2
Δ
ue e
t des
Micro
O1
iques
:211
0753
582:
8891
Ź Lorsque les lentilles sont disjointes, il est possible de réaliser Δ = F1′F2 = 0 , c’està-dire de confondre le foyer image de la première avec le foyer objet de la
seconde ; alors un rayon incident parallèle à l’axe et qui passe par F1′ , passe par
F2 , donc il donne lieu à un émergent parallèle à l’axe. Autrement dit, l’image
d’un objet à l’infini est à l’infini comme si le système n’avait pas de foyers (à
distance finie) : on dit qu’il est afocal (voir les exemples aux questions 37., 47. ou
62.).
L1
L2
caniq
5pIOH[LRQ5pIUDFWLRQ
périe
ure d
e Mé
21. Attention l’angle α n’est pas défini par rapport à la normale.
On prend un indice théorique de 1 pour nair . Le rayon réfracté
se rapproche de la normale car n > 1 . La loi de Descartes
donne :
θ
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
cos α
§π
·
§π
·
= 1, 6
sin ¨ − α ¸ = n sin ¨ − (α + θ ) ¸ n =
cos(α + θ )
©2
¹
©2
¹
α
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
$SSOLFDWLRQVGLUHFWHVGXFRXUV
22. La réflexion totale sur l’interface verre – goutte se
produit sous angle de réfraction limite il , les valeurs
n
α
59:1
N
n = N 2 − sin 2 α
soit
AN : n = 1, 376 correspondant effectivement à l’indice d’un liquide.
55.1
Alors sin α = N cos il = N 1 − n 2 / N 2
θ
il
6925
2957
9
de il , θ et α ne dépendent pas de la position de la
1
goutte sur le bloc.
n
π
il est donné par sin il = (< 1) , θ = − il (angles
2
N
complémentaires dans un triangle rectangle), et la loi
de Descartes pour la réfraction de sortie s’écrit N sin θ = sin α .
.65.1
La réflexion totale impose n < N et la valeur limite pour α est π 2 , soit :
:196
n > N 2 − 1 . Les valeurs mesurables de n sont : 1,282 < n < 1,626 .
iques
:211
0753
582:
8891
2320
23. De l’eau vers l’air les rayons s’écartent de la
normale ; le rayon en trait plein montre que
l’extrémité inférieure de la tige est visible de
l’extérieur. Le point d’incidence considéré est le plus
proche possible de la tige (bord du disque) car il
correspond aux angles d’incidences minimaux. En
revanche le rayon en pointillé qui arrive sur le dioptre
avec un angle d’incidence supérieur ou égal à l’angle
de réfraction limite subit une réflexion totale : la partie supérieure de la tige n’est
pas visible de l’extérieur.
Pour l’incidence limite il définie par sin il = 1/ n , la géométrie donne tan il = r / h
h = n − 1 r . On suppose ici l’observateur dans des conditions
d’où
d’observation proches des conditions de Gauss, lui permettant d’avoir une image
satisfaisante, par le dioptre plan, de la tige.
Micro
techn
2
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
24. Un simple dessin de l’objet
B
B′
(réel) regardant son image
O
(virtuelle) montre que la
hauteur de glace utile est
de
l = A′B′ / 2 = AB / 2 = 90 cm
(la moitié de la taille de
h
l’individu), résultat indéA
pendant de la distance de
d
A′
d
l’individu à la glace et de
la position des yeux.
L’œil « voit » l’image A′ si le rayon A′O passe par le miroir. Si l’on estime que la
distance des yeux au sommet de la tête est d’environ 10 cm , alors il faut placer le
miroir à h = 85 cm du sol, valeur indépendante de d.
&KDSLWUH
25. Le miroir et sa normale tournent de α , donc l’angle d’incidence et corrélativement
l’angle de réflexion varient chacun de α dans le même sens ; le rayon réfléchi
tourne donc de 2α .
6925
2957
9
/HQWLOOHVPLQFHV
2320
:196
.65.1
55.1
59:1
26. Pour une lentille convergente, en rapprochant l’objet réel de la lentille, on passe
lorsque A est à gauche de F d’une image réelle renversée (plus ou moins grande
que l’objet) à, lorsque A est entre F et O , une image virtuelle droite, plus grande
que l’objet ; c’est-à-dire que le faisceau incident divergent dans tous les cas, devient
convergent dans le premier cas (à gauche), mais reste divergent (certes moins) dans
le second cas (à droite).
B′
B
A′
F′
A
B
O
F
A′
F A O
F′
8891
B′
:211
0753
582:
Lorsque l’objet est virtuel ( A à droite de O ), il est défini par un faisceau
convergent sur la lentille ; la lentille le transforme alors en un faisceau encore plus
convergent, d’où une image réelle, plus petite que l’objet (s’exercer à le faire).
F
F′
A
B
O
A F
A′
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
B′
O
B′
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
F′
caniq
B
e Mé
A′
ue e
t des
Micro
techn
iques
27. À noter que dans ce cas l’objet est forcément virtuel puisque les rayons incidents ne
se croisent qu’après la lentille ( A à droite de O ).
Lorsque le faisceau est peu convergent ( A à droite de F , figure de gauche), la
lentille divergente arrive à le rendre divergent ; alors l’image est elle-même
virtuelle, renversée et plus ou moins grande par rapport à l’objet. Lorsque le
faisceau est très convergent ( A entre O et F , figure de droite) la lentille divergente
n’arrive pas à le faire diverger, il est simplement rendu moins convergent ; alors
l’image est réelle, droite et plus grande que l’objet.
28. Image par un système optique suivi d’une lentille
a) Le système est stigmatique, l’intersection des deux rayons émergents JK et MN
donnent l’image A1 .
6925
2957
9
b) Avec le sens de propagation indiqué, le faisceau ( JK , MN ) est divergent.
c) A1 situé avant la face de sortie de ( S ) est une image virtuelle pour ( S ) . A1 étant
avant la face d’entrée de ( L) est un objet réel pour ( L) .
d) Le faisceau peut être divergent, convergent ou parallèle suivant la position de A1
59:1
par rapport au foyer objet de ( L) . Par exemple si A1 est en F , le faisceau après
.65.1
55.1
( L) est parallèle.
e) Les constructions sont celles de la question 29. :
si A1 est avant F alors A′ est réelle, après O ,
:196
si A1 est en F alors A′ est à l’infini,
si A1 est entre F et O alors A′ est virtuelle avant A1 .
8891
2320
Donc A′ ne peut pas se situer entre A1 et O .
582:
29. Les constructions se font avec les rayons particuliers, comme dans la question 26. :
Les divers cas correspondent à un objet réel ou virtuel et à un objet de part et d’autre
du foyer principal objet. Le cas intermédiaire OA = 2 f est la position de
:211
0753
Silbermann, OA′ = 2 f ′ et γ = −1 .
Avec une lentille convergente, l’image est réelle sauf dans le cas d’un objet réel
entre F et O (cas de la loupe).
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
On remarque que lorsque A parcourt l’axe optique de −∞ à +∞ , A′ se déplace dans
le même sens. Quand A est à l’infini, A′ est en F ′ . Quand A se rapproche, A′
s’éloigne, donc en grandissant. Pour A à 2 f ′ de O, A′ est symétrique par rapport à
O et γ = −1 , c’est la position de Silbermann. Quand A s’approche de F, A′
s’éloigne à l’infini, toujours renversée et en grandissant. Quand A passe le point F,
A′ bascule de +∞ à −∞ et se redresse. Quand A se déplace de F à O, A′ le suit et
ils se rejoignent en O où γ = 1 . Ensuite A, virtuel, va de O à +∞ , alors que A′ reste
confinée entre O et F ′ qu’elle atteindra quand A sera à l’infini.
&KDSLWUH
Lentille
Lentille
convergente
convergente
a) Objet
a) Objet
réelréel
avant
avant
F F
B B
B B
A A
F F
6925
2957
9
Δ Δ
Δ Δ
F FO O
B′ B′
B′ B′
B B
F ′ F ′A′ A′
A AF FO O
Silbermann
Silbermann
//
B B
B′ B′
.65.1
B B
55.1
OA OA
< 2<f 2; image
f ; image
réelle
réelle
et −et1 −< 1γ <<γ0< 0
O O F ′ F ′ A′ A′ Δ Δ
:196
F ′ F ′ A′ A′ Δ Δ
A AF F
A AF F O O
B′ B′
2320
B′ B′
8891
2 f 2<f OA
< OA
< f <; image
f ; image
réelle
réelle
et γet<γ−<1 −1
B B
:211
b) Objet
b) Objet
réelréel
entre
entre
F etFOet O
B′ B′
iques
B′ B′
B B
O OF ′ F ′
A′ FA′AF A
techn
Micro
ue e
t des
caniq
c) Objet
c) Objet
virtuel
virtuel
Δ Δ
e Mé
B B
B′ B′
F′ F′
′
′A
A
A
A
O
O
F F
B B
O OF ′ F ′
A′ FA′AF A
Δ Δ
image
image
virtuelle
virtuelle
et γet>γ1 > 1
ure d
e Na
tiona
le Su
Δ Δ
Écol
B′ B′
F′ F′
F FO OA′ A′ A A
périe
B B
Δ Δ
B BB′ B′
O OF ′ F ′
′ A′
A
F F AA
B B
B′ B′
F′ F′
′
′A
A
A
A
O
O
F F
image
image
réelle
réelle
et 0et<0γ <<γ1 < 1
2SWLTXHJpRPpWULTXH
2SWLTXHJpRPpWULTXH
Δ Δ
0753
582:
O O F′ F′
A FA F
B′ àBl'′∞à l'∞
B B
B′ B′
F′ F′
′
A
F FO O A′ A A
Δ Δ
5pSRQVHVDX[TXHVWLRQV
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
A A
F ′ FA′′ A′
Δ Δ
59:1
′ ′
O OF FA′ A′
Δ Δ
Δ Δ
30. Les divers cas, et résultats de la construction géométrique, sont :
Lentille divergente
B
B
F′
A
A′
B′
F′
A
A′
Δ
O
F
O
F
image virtuelle et 0 < γ < 1
B′
F′
O
A A′
Δ
O
F′
A A′
Δ
F
:196
F
55.1
B
B′
.65.1
B
Δ
59:1
B′
6925
2957
9
a) Objet réel
F′
582:
B′
B
F
A
Δ
0753
O
techn
B
B′ à l'∞
O
F′
B
O
F′
Δ
F
A
B
Δ
A′
Δ
ue e
t des
A′
A′
Micro
c) Objet virtuel au-delà de F
Δ
F
A
iques
image réelle et γ > 1
F
B′
F′ O
A′
Δ
B
:211
F′
O
A A′
8891
b) Objet virtuel entre O et F
2320
B B′
F A
B′
F′
O
F
A
caniq
B′
e Mé
f < OA < 2 f ; image virtuelle et γ < −1
B
O
F
ure d
Δ
A′ F ′
A
périe
B′
tiona
e Na
Écol
Δ
A′
F′
O
F
A
B′
B
Δ
A′
F′
O
F
A
B′
le Su
2 f < OA ; image virtuelle et − 1 < γ < 0
B
&KDSLWUH
6925
2957
9
Ź objet réel : image virtuelle, droite, plus petite que l’objet.
Ź objet virtuel entre O et F : image réelle, droite, plus grande que l’objet.
Ź objet virtuel après F, f < OA < 2 f : image virtuelle, renversée, plus grande
que l’objet.
Ź objet virtuel après F, 2 f < OA : image virtuelle, renversée, plus petite que
l’objet.
Pas d’image réelle d’un objet réel avec une lentille divergente.
55.1
59:1
Comme à la question précédente A et A′ se déplace dans le même sens, ils se
retrouvent en O avec γ = 1 . Quand A passe le point F, A′ bascule de +∞ à −∞ et
se renverse.
.65.1
f′
1
1
1
−
=
d=
avec Δ dans le sens incident ( x = − D et x′ = d )
1− f ′ / D
d −D f ′
Pour D = ∞ , d min = f ′ = 50 mm (prévisible) et pour D = 0, 6 m , d max = 54,5 mm ,
:196
31.
8891
2320
ce qui donne une faible course de 4,5 mm pour la mise au point (obtenue par
rotation d’une bague qui déplace l’objectif par rapport au capteur). L’objet reste loin
de la lentille par rapport à la distance focale, l’image est proche de F ′ .
582:
1 1 1
− =
et x′ − x = D soit x 2 + D x + f ′ D = 0 en éliminant x′ ; il y a au moins
x′ x f ′
D
une solution réelle si Δ ≥ 0 f ′ ≤
ce qui établit la condition demandée.
4
iques
techn
A
F′
F
A′ Δ
O
Micro
Ź D = 4 f ′ une seule solution :
D
OA = − = −2 f ′ alors OA′ = 2 f ′ et
2
γ = −1 . A et A′ sont alors symétriques par
rapport à la lentille. Position de Silbermann.
:211
0753
32.
caniq
D2 − d 2
4D
e Mé
f′ =
ure d
Cette relation permet plusieurs mesures de f ′ pour des valeurs différentes de
D : c’est la méthode de Bessel.
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
f ′ ≤ D / 4 ; il existe donc deux positions de la lentille, symétriques
Pour
par rapport au milieu D / 2 , et qui donnent chacune une image nette sur
l’écran, l’une plus grande que l’objet (lorsque la lentille est plus proche de
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Ź D > 4 f ′ deux solutions :
− D + ( D 2 − 4 f ′ D)1 2
− D − ( D 2 − 4 f ′ D)1 2
et
2
2
Les 2 positions de la lentille sont espacées de d = ( D 2 − 4 f ′ D ) 1 2 , soit :
l’objet) et l’autre, plus petite que l’objet (lorsque la lentille est plus proche de
l’écran), tel que le produit des grandissements soit égal à 1.
Le produit des racines de l’équation en x, x 2 + Dx + f ′ D = 0 , est
P = x1 x2 = f ′ D . En éliminant x et en gardant x′ dans les équations du début,
x1′ x2′
. =1
x1 x2
59:1
γ 1γ 2 =
6925
2957
9
il vient x′2 − Dx′ + f ′ D = 0 de même Δ et dont le produit des racines est
P′ = x1′x2′ = f ′ D = P , d’où le produit des grandissements :
55.1
La situation se voit clairement sur le même schéma, où les traits pleins
correspondent à la position ( L1 ) de la lentille et les traits en pointillé à la
2
:196
.65.1
situation ( L2 ) avec A1′B1′. A2′ B2′ = AB .
A
B2′
B1′
582:
( L1 )
8891
′
A12
2320
d
B
0753
( L2 )
γ
Micro
f′=−
L’élimination de x′ conduit facilement à :
techn
iques
:211
33. La construction est faite à la question 28. ; l’objet est réel ( x = − 4, 0 cm < 0 ) et
l’image virtuelle ( x′ < 0 ) et il faut s’attendre à f ′ > 4, 0 cm .
Les formules de conjugaison et du grandissement donnent :
1 1 1
x′
− =
et γ =
x′ x f ′
x
γ −1
x
ue e
t des
AN : f ′ = 5, 0 cm , une loupe est une lentille de courte focale.
31 ʌ
×
= 9, 0.10 −3 rad .
60 180
La Lune est à l’infini (alors un point n’envoie que
des rayons parallèles entre eux), il faut donc placer
l’écran dans le plan focal image de la lentille.
d = f ′ tan α ≈ f ′α
E
α
F′
F
d
soit d = 0, 45 cm où
ure d
On a
e Mé
caniq
34. Conversion : 31′ =
périe
l’approximation concerne α exprimé en radians.
e Na
Écol
tiona
le Su
35. Il faut comprendre ici x = OA = +2, 0 cm et f ′ = OF ′ = −3, 0 cm .
&KDSLWUH
B′
F′
A′
A F
O
6925
2957
9
B
f′x
= 6, 0 cm
f ′+ x
A′B′ x′
= = +3, 0
x
AB
γ=
et
55.1
x′ =
D
aD
x′
et x′ =
= − a et D = x′ − x donnent x = −
x
1+ a
1+ a
et, avec la formule de conjugaison
2320
Attention aux signes :
1 1 1
− = , on obtient
x′ x f ′
f′=
8891
36. Vidéo projecteur
:196
.65.1
1 1 1
− =
x′ x f ′
59:1
Faire le dessin avec soin.
aD
(1 + a )2
582:
2
; f ′ = 73 mm
0, 03
Le panneau LCD est alors à 74 mm de la lentille (proche de F), l’encombrement est
raisonnable pour le projecteur. γ < 0 , il faut placer l’objet (panneau LCD) à
l’envers.
iques
:211
0753
AN : a =
techn
37. Principe d’une lunette astronomique
F1′= F2
α′
′
Ai Bi f1α
=
f 2′
f 2′
d’où
G=
ure d
α′ =
e Mé
caniq
Pour que l’image soit vue à l’infini, il faut faire coïncider F1′ et F2 (système afocal).
En effet l’image par l’objectif est dans le plan focal image de cette lentille, qui doit
être le plan focal objet de l’oculaire pour que l’image définitive soit à l’infini. On
note Ai Bi l’image intermédiaire. Les angles ne sont pas orientés, en valeur absolue :
α ′ f1′
=
= 50
f 2′
α
périe
(la focale de l’objectif sur celle de l’oculaire).
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
L’image est renversée ce qui n’est pas gênant pour une observation astronomique ;
en revanche cela ne convient pas pour des observations terrestres, il suffit alors de
remplacer l’oculaire convergent par un oculaire divergent (en conservant F1′ = F2 )
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Ai Bi
Micro
α
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
6925
2957
9
pour obtenir une image droite (s’en assurer par la construction) : c’est la lunette de
Galilée, et qui pour F1′ ≠ F2 , permet de regarder des objets à distance finie.
55.1
59:1
38. Pas tout à fait, car la vision n’implique que l’œil (et pas le reste du corps !). Il vaut
mieux dire « Si je peux voir ton oeil, alors tu peux voir mon oeil ».
Une glace sans tain suit évidemment le principe du retour inverse de la lumière,
mais ce principe ne renseigne pas sur l’énergie lumineuse transportée par les deux
faisceaux inverses…
8891
2320
:196
.65.1
39. Les rayons lumineux sont déviés par deux
prismes (rectangles isocèles) tête-bêche accolés
(pour réduire les pertes par réflexion) utilisant
la réflexion totale i = 45° > il = 42° (pour un
verre d’indice 1,5) ; ceci permet de rapprocher
les deux faisceaux incidents.
40. I est le point du tube de verre tel que HI
soit tangent à la gaine de mercure et donnant
un rayon extérieur parallèle à l’axe pour une
vision éloignée. Le dessin montre clairement
que le rayon apparent ra de la gaine est
supérieur au rayon réel r .
r r
n sin i1 = 1.sin i2 n = a d’où ra = nr
R R
H
r
ra
•
techn
iques
:211
O
0753
582:
I
ue e
t des
Micro
La valeur maximale pour ra est R : l’observateur voit un tube entièrement rempli de
mercure.
À noter qu’en plus de la face avant de la colonne de mercure, la réfraction permet de
voir une partie de la face arrière…
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
41. D’un dioptre à l’autre le rayon est réfracté n1 sin i1 = n2 sin i2 = ... = n p sin i p ; une
succession de petits segments conduisent alors (par passage à la limite) à une
trajectoire courbe pour les rayons lumineux.
* L’indice du mélange augmente avec la concentration en sucre, le rayon laser est
JJJJG
dévié vers le bas, vers les indices croissants (dans le sens de grad n , grandeur
définie plus tard dans l’année).
* L’air se raréfiant avec l’altitude, son indice passe de n = 1, 0003 au niveau du sol à
n = 1, 0000 à l’entrée de l’atmosphère. Cette différence étant très faible, un rayon
provenant d’une étoile est légèrement dévié en se rapprochant continûment de la
normale (et ce d’autant plus que le rayon est initialement incliné), ce qui conduit à
faire une petite erreur d’environ 1’ pour α = 45 ° sur sa position angulaire (son
inclinaison α mesurée par rapport à la verticale est légèrement sous-évaluée).
&KDSLWUH
2320
:196
.65.1
55.1
59:1
6925
2957
9
Cette réfraction atmosphérique explique également la forme légèrement aplatie du
Soleil au couchant…
* Du centre vers le bord d’une fibre optique, l’indice décroît faiblement (en gros de
1,50 au centre à 1,49 au bord (rayon de la fibre : 20 ȝm ). L’intérêt d’une
trajectoire sinusoïdale réside dans le fait qu’en s’éloignant de l’axe, la lumière va
plus vite (quand l’indice diminue, la vitesse augmente) ce qui compense
l’allongement du trajet géométrique par rapport au rayon axial (et conduit ainsi
pour les différents rayons à un chemin optique stabilisé, notion qui sera définie en
seconde année). Ceci permet un bon stigmatisme, réduit l’élargissement temporel
d’une impulsion par rapport à une fibre à saut d’indice (rayon en dents de scie par
réflexion totale sur une gaine moins réfringente) et permet ainsi une augmentation
de la quantité d’informations à transmettre par unité de temps le long d’une fibre
de longueur donnée.
* Par temps très chaud (dans le désert ou l’été sur une route goudronnée) l’air dilaté
près du sol (sur quelques dizaines de cm) est un peu moins dense conduisant à un
indice qui augmente vers le haut dans cette couche. Les rayons lumineux dans
cette couche sont alors courbes avec une concavité vers le haut et l’observation
d’une image renversée (le mirage) donne l’illusion d’une surface miroitée.
périe
ure d
e Mé
caniq
ue e
t des
43. Les lentilles considérées ici ne vérifient pas le modèle lentille mince. Pour une
lentille à bord mince (dessin de gauche), le rayon incident subit deux réfractions qui
le rapprochent de l’axe et rend le faisceau convergent : la lentille est dite
convergente. Pour une lentille à bord épais (dessin de droite), le rayon incident subit
deux réfractions qui l’éloignent de l’axe et rend le faisceau divergent : la lentille est
dite divergente.
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
44. En un point du plan focal image (plan perpendiculaire à l’axe et passant par F ′ ) qui
est le foyer secondaire image correspondant à cette inclinaison.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
techn
iques
:211
0753
582:
8891
G
42. Soit Oxyz le dièdre rectangle attaché au dispositif et soit u = (a, b, c ) le vecteur
unitaire selon lequel le faisceau y rentre.
Chacune des trois réflexions planes successives (une
sur chacun des trois miroirs) inverse une des
G
composantes du vecteur u ; le faisceau ressort
finalement dans la direction ( −a, −b, −c) qui est celle
G
du vecteur − u . Ce dispositif placé sur la Lune a
permis de mesurer précisément la distance Terre-Lune
(environ 380 000 km avec une précision de quelques
cm) en mesurant avec précision le temps de parcours d’un aller retour du faisceau
laser (environ 2, 5 s avec une précision de 0,1 ns !).
45. L’onde est en phase en I et H pour le faisceau
incident et en J et K pour le faisceau réfracté. Il
faut donc que les temps de parcours sur HJ et IK
soient égaux :
IK
HJ
a sin i 2
a sin i1
=
=
v2
v1
c n2
c n1
milieu 1 (n1 )
H
i1
6925
2957
9
i1 a
soit n1 sin i1 = n 2 sin i 2
ce qui redonne la loi de Descartes.
J
i2
I
milieu 2 (n 2 )
59:1
i2 K
:196
.65.1
55.1
46. L’œil placé juste en sortie de l’instrument ne peut observer directement et aisément
(en regardant dans le sens inverse de l’arrivée de la lumière) que des images
virtuelles (pour voir une image réelle, il faut se placer à pp ≈ 25 cm en arrière et
très peu de rayons arriveront dans l’œil). Il peut en revanche voir facilement par
diffusion l’image réelle qu’un système a projetée sur un écran.
:211
0753
582:
8891
2320
47. On peut associer deux lentilles, la première
divergente de très courte focale f1′ (< 0) et la
F1′
deuxième convergente de grande focale f 2′ à
condition de faire coïncider le foyer image F1′
F2
de la première avec le foyer objet F2 de la
seconde. Si D est le diamètre du faisceau final
et d celui du faisceau initial, alors D / f 2′ = − d / f1′ , soit pour d = 2 mm et
D = 3 cm , f 2′ = −15 f1′
techn
iques
NB : Ce système est préférable à celui de deux lentilles convergentes avec un
passage réel aux foyers ( F1′ = F2 ) imposant localement une forte intensité ce
qui, avec un laser de puissance, conduit à des étincelles par ionisation de l’air.
ue e
t des
Micro
48. Le fait que Pythéas, scientifique Massaliote, ait vécu à une époque (le IVe siècle
avant J.-C.) à laquelle les lunettes n’existaient pas n’est pas la bonne réponse ! Si
l’herbe s’enflamme, c’est que les verres sont convergents, prescrits à des
hypermétropes, la correction de la myopie nécessite des verres divergents… cette
histoire est donc une galéjade ! (voir également la question 50. ci-dessous).
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
49. Il faut placer l’objet AB à agrandir
B′
derrière une lentille convergente (par
rapport aux yeux), à une distance de la
B
lentille inférieure à la distance focale. Si
′
′
A est entre F et O , l’image A B ,
virtuelle, droite, et plus grande que l’objet,
A′ F A O
F′
se trouve à distance finie de l’observateur ;
celui-ci est donc obligé d’accommoder
(modifier la focale du cristallin) pour la
voir nette, ce qui fatigue l’œil. Si A est en F , l’image est rejetée à l’infini, ce qui
en permet l’observation sans accommodation (œil au repos) et donc sans fatigue.
&KDSLWUH
.65.1
55.1
59:1
6925
2957
9
50. Afin que le faisceau soit moins convergent
rétine
dans l’œil (sans lentille le faisceau en
pointillé converge avant la rétine et donc
l’objet à l’infini apparaît flou), il faut
d’abord le faire diverger en plaçant une
lentille divergente devant l’œil. Tout objet
nerf
cristallin
au-delà de 2 m (vu flou sans lunette) doit
optique
être ramené par le verre correcteur à une
distance apparente de moins de 2 m (image virtuelle, droite et plus petite que
l’objet) auquel cas il est vu net. L’objet à l’infini, x = − ∞ , est lui ramené à la
distance maximale x′ = −2 m , ce qui suppose f ′ = −2 m soit un verre de vergence
V = 1/ f ′ = − 0,5 į
582:
8891
2320
:196
51. Un faisceau cylindrique arrive sur l’œil
(dont seul le cristallin au centre est
représenté). Les rayons en trait plein
sont dans le plan vertical (celui de la
Fh′ Fv′
feuille) dans lequel la courbure du
cristallin est moins forte ; ils
convergent donc plus loin, en Fv′ . Les rayons en pointillé sont dans le plan
0753
horizontal (perpendiculaire à la feuille) dans lequel la courbure du cristallin est plus
forte ; ils convergent donc plus près, en Fh′ . Le foyer image est constitué du
iques
:211
segment Fh′ Fv′ d’où la gêne ; ce défaut est corrigé avec des lentilles dites
« cylindriques » dont la courbure dépend du plan considéré.
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
e Mé
53. La (distance) focale d’un objectif standard (lentille convergente) pour un appareil
reflex est de 50 mm . Un grand angle qui offre un grand champ d’une vue paraissant
plus éloignée, a une plus courte focale (28 à 35 mm ), et un téléobjectif qui permet
de rapprocher un petit champ, a une focale plus grande (70 à 200 mm ). Un zoom
est un système qui permet de façon mécanique ou numérique d’obtenir un objectif
de focale variable (comme le cristallin de l’œil par action musculaire).
Pour l’appareil photo d’un smartphone la focale standard est de 28 à 30 mm.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
Micro
techn
52. Les tissus constituant l’œil sont des milieux faiblement dispersifs ; et donc si
l’indice du cristallin (la lentille de l’œil) dépend légèrement de la longueur d’onde,
c’est-à-dire de la couleur, alors il en est de même pour la distance focale. Le vert et
le rouge convergent donc (pour un œil normal) un peu avant ou après la rétine
(l’écran de l’œil).
L’ophtalmologiste propose d’abord une correction approchée en lumière blanche à
un œil myope ou hypermétrope ; en fin de test, suivant que le patient voit mieux
avec un filtre rouge ou un filtre vert, il saura si le verre proposé sous-corrige ou surcorrige, ce qui lui permet d’affiner la correction.
6925
2957
9
54. Si a est le côté du pixel exprimé en ȝm , alors 8,8.103 × 6,6.103 = 4.106 a 2 soit
a ≈ 4 ȝm (en réalité le capteur présente 2400 × 1800 = 4,32 MegaPixels). La taille
du pixel conditionne la résolution de l’image car plus le nombre de points d’analyse
est important, mieux les détails sont restitués en théorie.
n >1
1
55.1
55. Lame à faces parallèles et stigmatisme (*)
a) Si l’incidence est normale, le rayon n’est
ni dévié ni décalé.
Il est intéressant, dans ce cas, d’utiliser
une notation des angles qui respecte le
principe de retour inverse.
59:1
([HUFLFHV
i′
r′ r
I
:196
i
.65.1
J
0753
:211
1
iques
techn
i
J
r
I
i
n
K
H
A′
Micro
b) L’écart entre incident et transmis se
caractérise par la distance entre ces deux
rayons parallèles, soit IH .
Dans le triangle IJH : IH = IJ sin(i − r )
e
Dans le triangle IJK : IJ =
cos r
Soit :
A
sin(i − r )
= e (sin i − cos i tan r )
IH = e
cos r
582:
8891
2320
En I : sin i = n sin r
e
En J : sin i′ = n sin r ′
De plus r = r ′ (angles alterne-interne),
donc i = i′ le rayon n’est pas dévié, il est décalé ou translaté.
ue e
t des
§ tan r ·
IH = e sin i ¨1 −
¸
tan i ¹
©
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
IH dépend bien de n , car r en dépend. On garde r , comme demandé dans
l’énoncé, pour la lisibilité. A priori IH dépend de i .
Si l’image de A existe, elle se trouve sur la normale aux dioptres, passant par
IH
§ tan r ·
A : soit AA′ =
= e ¨1 −
¸
sin i
tan i ¹
©
Il est clair que AA′ dépend de i (même raisonnement qu’à la question 14.) : la
lame à faces parallèles n’est pas stigmatique.
§ tan r ·
§ sin r ·
§ 1·
Pour des angles assez petits : AA′ = e ¨1 −
¸ ≈ e ¨1 −
¸ ≈ e ¨1 − ¸ .
tan i ¹
©
© sin i ¹
© n¹
On ne peut donc parler d’image que dans les conditions de Gauss (ici, rayons peu
inclinés sur la normale aux dioptres) et la relation de conjugaison est :
&KDSLWUH
n −1
e
n
c) Sur la figure, R est la position du requin et A
celle de l’observateur ; les conditions de Gauss
sont a priori respectées. L’énoncé donne
O1O2 = 60 cm , O2 A = 20 cm , on déduit alors de
RA = 1, 00 m que O1 R = −20 cm .
ne
nv
Ri
R O1 R′
6925
2957
9
AA′ =
na
:196
.65.1
55.1
59:1
O2
A
On note Ri l’image (intermédiaire) que donne le
1er dioptre (eau / verre) de R ; elle sert d’objet au 2e dioptre (verre / air) qui en
donne une image finale R′ , et on utilise les relations de conjugaison de la
question 14. :
n
n
n
1er dioptre : R → Ri : e = v O1 Ri = v O1R = −22,5 cm
ne
O1R O1 Ri
8891
2320
d’où O2 Ri = O2O1 + O1 Ri = − 82,5 cm
n
n
n
2e dioptre : Ri → R′ : v = a O2 R′ = a O2 Ri = −55, 0 cm
nv
O2 Ri O2 R′
582:
La distance apparente du squale à l’observateur est : R′A = R′O2 + O2 A
iques
:211
0753
soit R′A = 75, 0 cm
L’image du requin plus proche, est vue sous un angle plus grand, le requin paraît
plus gros.
O2
Δ
F2
ure d
périe
le Su
tiona
e Na
Écol
2SWLTXHJpRPpWULTXH
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
F2′
F1′
O1
e Mé
F1
caniq
ue e
t des
Micro
techn
56. Étude graphique d’un doublet
a) On utilise les foyers secondaires pour déterminer les plans focaux de chaque
lentille.
F1
F′
F1′
F2′
Δ
O2
F2
0753
582:
8891
2320
O1
:196
F
.65.1
55.1
59:1
6925
2957
9
b) Le foyer image F ′ du système, est l’image d’un point à l’infini sur l’axe, il est
sur l’axe. C’est l’intersection avec l’axe de l’émergent correspondant à un
incident parallèle à l’axe.
De même le foyer objet F est sur l’axe, à l’intersection avec l’incident correspondant à un émergent parallèle à l’axe. On peut faire la construction à
« l’envers » en partant de l’émergent parallèle à l’axe.
ue e
t des
Micro
techn
iques
:211
57. Appareil photographique
a) Ź un long temps de pose permet d’exposer longtemps la surface du capteur, ce
qui est utile pour les scènes peu lumineuses.
ŹUn court temps de pose permet d’exposer très peu de temps le capteur, ce qui
est utile pour les scènes très lumineuses ou rapides.
D2
ŹSi on multiplie D par 2 , la surface S = π
est multipliée par 2. Ainsi à
4
chaque augmentation de N on divise la surface par 2 et donc l’énergie lumineuse
reçue.
ŹSi N augmente, D diminue et moins de lumière est admise, il faut alors
augmenter le temps de pose.
e Mé
caniq
b) ŹSi le capteur est dans le plan focal image de l’objectif, on forme l’image de
points à l’infini, c’est-à-dire situés à une grande distance par rapport à la distance
focale.
Ź A′B′ = − f ′α
B
A′ B′ = 24 mm α1 = 0, 48 rad = 27°
∞
e Na
Écol
tiona
le Su
périe
ure d
α
O A′ F ′ Δ
A′B′ = 36 mm α 2 = 0, 72 rad = 41°
valeur limite pour le stigmatisme avec une seule
B′
lentille.
′
Le même calcul avec f = 135 mm donne un champ de 10°× 15° , plus réduit
avec une focale longue de téléobjectif.
&KDSLWUH
d F ′A′
=
D OA′
ŹDans les triangles de même forme de sommet A′ :
OA′
F ′A′
=−
f′
OA
d
f′
f′
, ce qui établit la relation.
=−
=
Et avec OA = − L
D
L
OA
Quand L augmente, d diminue et pour d = a , L = L0 . Alors si L > L0 , d < a
et la taille de la tache est inférieure à celle d’une cellule image ponctuelle
pour le capteur.
f ′D
a
f′
,
N
et avec D =
L0 =
f ′2
Na
55.1
L0 =
.65.1
a
f′
=
D L0
59:1
6925
2957
9
La relation de grandissement :
:196
c) ŹSi N augmente, l’ouverture diminue et A1 A2 augmente. Pour N qui
0753
582:
8891
2320
augmente on a L0 qui diminue, donc une profondeur de champ entre −∞ et A0
qui augmente. Les variations sont cohérentes.
ŹLa profondeur de champ détermine ce qui va apparaître net sur la
photographie. Dans le cas d’un portrait, par exemple, il est préférable que seul le
sujet soit net et le fond flou, on essaye alors d’avoir une faible profondeur de
champ.
d)
Micro
techn
iques
:211
1) De nuit la luminosité est plus faible, il faut, à ouverture constante, augmenter
le temps de pose et le risque de « bougé » est plus grand. De plus en
augmentant l’ouverture, on réduit la profondeur de champ et la mise au point
est plus sensible.
24 × 36 10−6
a = 6, 5 ȝm l’ordre de
2.1) Avec des pixels carrés : a 2 =
20, 2 106
grandeur de l’énoncé.
ue e
t des
N
2
= 2 × 6 10−6 × (15)2
≈ 29 cm
2
(0,135)2
f′
La profondeur de champ est suffisante pour la taille de l’animal, l’ouverture
importante permet de diminuer le temps de pose (moins de risque de
« bougé ») avec une bonne luminosité.
La focale, élevée, permet une image plus grande (car le champ diminue
quand f ′ augmente) et avec une faible profondeur de champ, seule la
marmotte sera nette sur la photo, l’arrière-plan sera flou et la tête de la
marmotte mise en valeur.
caniq
A1 A2 ≈ 2 a L2
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
ure d
e Mé
2.3)
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
(50 10−3 )2
= 19 m , la fille de Monsieur
22 × 6 10−6
L. (supposée immobile) ne sera pas nette.
2.2) La distance hyperfocale est L0 =
L 15 10−3
=
= 9, 4 10−3 rad = 0,54° = 30′
1, 6
D
L
θ
La taille de la Lune (à l’infini) sur le capteur est O
d 0 = f ′θ , et le tirage sur papier est dans le
D
100 150
100
=
dimension d = 0.135 × 9, 4 10 −3 ×
≈ 5, 3 mm
rapport
24
36
24
L’image est petite, il faut utiliser une focale plus grande.
6925
2957
9
2.4) θ =
Δt ≤
La
f ′V
2320
La condition γ V Δt ≤ a conduit finalement à
:196
.65.1
55.1
59:1
2.5) OA = − L et l’image (donc le capteur) est à OA′ ≈ f ′ car L f ′
L’image est nette si le déplacement du point image sur le capteur, pendant
la durée d’exposition de dépasse pas la taille d’un pixel. En Δt le point
OA′ f ′
objet parcourt V Δt et le point image γ V Δt , avec γ =
= .
OA
L
36 103
1
= 10 m.s −1 et Δt ≤ 3, 6.10 −4 s ≈
s , « vitesse »
3600
2800
d’obturation accessible avec l’appareil proposé.
0753
582:
8891
AN : V =
iques
:211
58. Réduction et agrandissement
a) L’objet est réel, la lentille divergente fournit une image virtuelle, donc pas sur le
récepteur.
O1 A′ f 1′
O′A1 O′A
et (1) f ′ =
f 1′ − O1 A′
O′A − O′A1
ue e
t des
(2) O1 A1 =
Micro
techn
b) 1) Si L′ est divergente, alors l’image est virtuelle, donc dans l’espace objet réel
de L1 et l’image définitive est virtuelle. L′ est convergente.
1
1
1
1
1
1
L1
L′
2) A ⎯⎯
→ A1 ⎯⎯
→ A′ ,
(1) et
(2)
−
=
−
=
f′
f 1′
O′A1 O′A
O1 A′ O1 A1
O1 A′ f 1′
f 1′ − O1 A′
caniq
avec O′A1 = O′O1 + O1 A1 = D − 2d +
A′B′
A′B′ A1 B1
O′A1 O1 A′
=
= γ ′γ ′′ =
AB
A1 B1 AB
O′A O1 A1
ure d
3) γ 1 =
e Mé
AN : O′A1 = 84 mm et f ′ = 57,3 mm , on a bien f ′ > 0
périe
AN : γ 1 = −1, 4 ; soit S ′ = γ 12 S = 2 S , tirage A4 en A3.
e Na
Écol
tiona
le Su
c) L2 et L3 accolées sont équivalente à L′ , d’après la question 20. :
1
1
1
=
+
f′
f 1′ f 3′
&KDSLWUH
On en déduit f 3′ = 35, 0 mm , L3 est convergente.
d) Le système est L1 en O′ et ( L3 * L1 ) en O1 . Or le comportement symétrique des
lentilles conduit à ( L3 * L1 ) ≡ ( L1 * L3 ) ≡ L′ . De plus d’après le retour inverse
6925
2957
9
de la lumière, A et A′ conjugués par L′ et L1 , le sont par L1 et L′ . On avait A′
image de A par le premier système, maintenant A est l’image de A′ , soit
1
γ2 =
= − 0, 71 ; soit S ′ = γ 22 S = 0,5 S , tirage A4 en A5.
59. L’œil
a) Le schéma ci-contre considère les rayons
parallèles à l’axe d’un objet A∞ à l’infini.
Pour un œil normal (en pointillé) l’image
se forme sur la rétine. Pour un œil myope
(en trait plein) dont le cristallin est trop
convergent ( f1 et f 2 sont inférieurs à δ ),
l’image se forme en avant de la rétine ; elle
apparaît donc floue.
.65.1
55.1
59:1
γ1
F′
2320
O
:196
A∞
A′
nerf
optique
582:
8891
cristallin
rétine
1 1
δf
=
soit x = −
.
δ x f
δ−f
Il faut bien comprendre qu’ici x′ = OA′ = δ est fixe ; la distance focale f ′ du
cristallin est variable, ce qui permet de voir des objets de position x variable.
−
0753
1
:211
b) La formule de Descartes s’écrit
iques
L’œil n’accommode pas : f1 = 1,50 cm x1 = −1,14 m
techn
L’œil accommode au maximum : f 2 = 1,37 cm x2 = −13,9 cm
périe
ure d
e Mé
caniq
c) On distingue d’autant mieux deux objets
a
rapprochés qu’ils sont près de l’œil ; il faut
b′
ε
donc les amener au Punctum Proximum. Sur
d
a′
la figure ci-contre la lentille représente le
b
′
F
cristallin et l’écran la rétine.
– l’œil normal accommode et fixe la focale
pp
δ
1
1
1
f avec −
=
f = 1, 43 cm
δ − pp f
La figure montre que ab ≈ ε × pp = 75 ȝm ; au niveau de la rétine cela
le Su
correspond à une distance d = a′b′ ≈ ε δ = 4, 6 ȝm .
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
– pour l’œil myope, f = 1, 26 cm car pp = 7,5 cm d’où ab ≈ ε × pp = 22,5 ȝm
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
L’œil normal lorsqu’il n’accommode pas voit jusqu’à l’infini, alors que pour l’œil
myope le PR est proche. En revanche l’œil myope voit plus près qu’un œil
normal dont pp = 25 cm .
Conclusion : le myope voit moins bien de loin (la correction est envisagée à la
question 50.), mais mieux de près.
L’œil myope pouvant voir de plus près possède donc un meilleur pouvoir
séparateur.
α ′ pp
=
α
f′
Gc =
55.1
Le grossissement commercial est
59:1
6925
2957
9
60. Grossissement commercial d’une loupe
AB
. Pour que l’image soit à l’infini (principe de la
En vision directe α ≈ tan α =
pp
loupe sans accommodation, voir la question 49.), il suffit de placer l’objet dans le
plan focal objet de la lentille, alors α ′ ≈ tan α ′ = AB / f ′ .
.65.1
Ce résultat indique que plus une loupe est convergente ( f ′ petit), plus son
grossissement commercial est grand.
2320
:196
AN : Gc = 4 donne f ′ = 6 cm , ordre de grandeur classique.
A F1
F1′
A1
F2
O1
A′
périe
ure d
e Mé
B1
B′
F2′
O2
caniq
B
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
61. Le microscope
a) Bien sûr des figures à l’échelle sont impossibles ; ce qui importe, ce sont les
constructions des 3 rayons qui permettent de suivre l’évolution du faisceau initial.
Pour déterminer les émergents après l’oculaire, il faut s’aider de rayons
auxiliaires (en pointillé) passant par O2 et qui vont jusqu’au plan focal image
passant par F2′ .
– dans le premier cas, l’image A′B′ est réelle (et serait donc projetable sur un
écran !), ce qui ne convient pas pour une vision directe à l’oeil.
– dans le second, l’image A′B′ est virtuelle (plus grande et renversée) et peut
s’observer par vision directe (l’oculaire sert de loupe pour voir A1 B1 ) : cela
convient donc pour un microscope.
Pour D = O1O2 grand, A1 B1 se forme entre O1 et F2
e Na
Écol
tiona
le Su
Pour D plus petit, A1 B1 se forme entre F2 et O2
&KDSLWUH
B
A′
A F1
F1′ F2 A1
F2′
O2
•
O1
6925
2957
9
B1
55.1
59:1
B′
1
1
1
O1 A1 = 16, 4 cm
−
=
O1 A1 O1 A f1′
.65.1
b) Formule de Descartes pour l’objectif :
1
1
1
O2 A′ = −36, 0 cm
−
=
O2 A′ O2 A1 f 2′
2320
Formule de Descartes pour l’oculaire :
:196
On est bien dans le cas de la 2ème figure avec A1O2 = O1O2 − O1 A1 = 3, 6 cm < f 2′
582:
O A′ O1 A1
A′B′ A′B′ A1B1
=
×
= γ 2 .γ 1 γ = 2 ×
= 10 × (− 40) γ = − 400
AB A1 B1 AB
O2 A1 O1 A
0753
γ=
8891
(ce qui confirme que l’image est virtuelle et suffisamment éloignée).
Le grandissement total est :
:211
La valeur est élevée, c’est l’intérêt du microscope.
iques
c) Pour que A′B′ soit à l’infini, il faut que A1 B1 soit dans le plan focal objet
(passant par F2 ) de l’oculaire, d’où O1 A1 = O1F2 = 16, 0 cm ; la position de l’objet
1
1
1
−
=
O1 A1 O1 A f1′
O1 A = − 4,102 mm contre − 4,1 mm à la
techn
est donnée par
Micro
question b) ( A étant très près de F1 , la position de A1 est très sensible).
ue e
t des
d) Lorsque l’œil n’accommode pas, on est dans la situation de la question
précédente et O1 A = − 4,102 mm .
caniq
voir A′B′ est telle que A′F2′ = pp . La formule de conjugaison de Newton pour
e Mé
l’oculaire : F2 A1.F2′A′ = − f 2′2 F2 A1 = 0, 64 cm .
ure d
La formule de conjugaison de Descartes pour l’objectif
1
1
1
−
=
avec
O1 A1 O1 A f1′
périe
O1 A1 = O1 F2 + F2 A1 = 16, 64 cm conduit à O1 A = − 4, 098 mm
le Su
d’où Δx = 0, 004 mm = 4 ȝm
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
On dispose donc d’une très faible latitude de mise au point ; l’ordre de grandeur
justifie le recours à une vis micrométrique.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Lorsque l’œil accommode au maximum, sachant qu’il est placé en F2′ , l’image à
e) Dans le cas de la vision à l’infini, le schéma est le suivant :
F1′ F2 A1
A F1
O2
O1
F2′
α′
6925
2957
9
B
59:1
B1
.65.1
AB
, avec comme l’indique la figure α ′ ≈ tan α ′ =
Pi =
γ1
A1 B1
,
f 2′
f 2′
8891
d’où
:196
α′
2320
Par définition Pi =
55.1
B∞′
AN : γ 1 = 16 / 0, 41 = 39 et Pi = 9,8.102 dioptries , exprime les possibilités du
AN :
G=
γ 1 pp
f 2′
= Pi pp
techn
d’où
:211
A1 B1
α′
AB
et α ≈
(à l’œil nu)
avec α ′ ≈
′
α
pp
f2
iques
f) Le grossissement est G =
0753
582:
microscope, ce n’est pas un grossissement, sa valeur n’est pas directement
interprétable.
G = 2, 4.102 , ce qui indique seulement l’ordre de grandeur du
ue e
t des
Micro
grossissement réel (car α est ici une référence normalisée).
caniq
62. Lunette astronomique
a) Il faut F1′ ≡ F2 , soit h = f 1′ + f 2′ , le système est afocal ; l’image à l’infini permet
une observation sans accommoder, donc sans fatigue oculaire.
L1
F1′ F2
e Mé
b)
F2′
α′ Δ
le Su
tiona
e Na
α′
f′
= − 1 , G < 0 traduit le fait que l’image est renversée.
α
f 2′
Écol
c) G =
périe
ure d
α
L2
&KDSLWUH
Pour Mars : α ′ = 1, 3.10 −2 rad <
Pour la Lune : α ′ = 1, 2 rad >
π
6
diamètre
f′
, α′ = α 1
distance
f 2′
π
6
, Mars est vu en entier
6925
2957
9
d) L’objet est étendu à l’infini : α =
, on ne voit qu’une partie de la Lune
:196
.65.1
55.1
59:1
e) Tous les rayons arrivant sur l’objectif émergent en passant par son image par
l’oculaire.
L1
L2
D
F1′ F2
G =
Δ
O1
d
D
d
8891
2320
Soit O le centre du cercle oculaire, c’est l’image de O1 par L2 de centre O2 :
1
1
1
−
=
, avec O2O1 = − 806 mm , soit O2O = 6, 04 mm .
f 2′
O2O O2O1
0753
582:
Le cercle oculaire est pratiquement en F2′ et d = 0, 45 mm .
Il faut placer l’œil au niveau du cercle oculaire dont le diamètre doit être inférieur
au diamètre de la pupille de l’œil (de l’ordre de 3 à 4 mm).
Micro
4XHVWLRQVRXYHUWHV
techn
iques
:211
f) L’objectif de la lunette (le miroir primaire pour un télescope) joue le rôle de
collecteur de lumière grâce à son grand diamètre, ce qui permet de voir des objets
de faible luminosité. Le grossissement, qui varie suivant l’oculaire utilisé, n’est
pas essentiel (sauf pour le problème de la taille du cercle oculaire).
caniq
Le rayon à construire se réfléchit successivement sur trois miroirs plans : M 1 la
e Mé
partie supérieure de la boîte, puis M 2 la partie droite de la boîte, et enfin M 3 la
partie inférieure de la boîte.
Après réflexion sur M 1 , le rayon émergent semble passer par l’image virtuelle S1′
ure d
de S à travers M 1 . La position de cette image est connue : elle est symétrique de S
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
par rapport à M 1 .
Cette image S1′ sert alors d’objet lors de la réflexion sur M 2 . L’image
correspondante (symétrique de S1′ ) est notée S 2′ .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
63. Trajet boomerang d’un rayon lumineux
Indication : Traiter les 3 côtés comme des miroirs en pensant à introduire les
images successives de S .
De même, S 2′ est un objet pour la dernière réflexion sur M 3 . L’image correspondante est S 3′ . Le rayon émergent de M 3 semble alors passer par S 3′ et doit
repasser par S par hypothèse : il est donc porté par le segment S3′ S qui débute le
6925
2957
9
tracé et détermine le point d’impact P3 sur M 3 permettant de poursuivre la
construction.
S 2′
55.1
S1′
.65.1
P1
M1
59:1
On en déduit la construction complète ; attention à bien tracer les portions réelles en
trait plein, et les portions virtuelles en pointillé.
M2
2320
:196
S
582:
P3
S 3′
Micro
techn
iques
:211
0753
M3
8891
P2
caniq
ue e
t des
64. Trajet optimisé entre deux points (*)
Indications : certaines distances dans ce problème sont fixes, les noter, puis choisir
une origine O et définir une variable x donnant la position du point
I ; à la fin du calcul, penser à introduire les angles par rapport à la
normale en I .
ure d
e Mé
Comme A court plus vite sur la plage qu’il ne nage dans l’eau, on conçoit qu’il n’a
pas intérêt à rejoindre B en ligne droite car cela allongerait son trajet dans l’eau où
il est moins rapide. La solution consiste à augmenter un peu son trajet sur le sable
afin de réduire la distance à parcourir dans la mer...
e Na
Écol
tiona
le Su
périe
Les distances de A et B au bord de mer sont fixes, on les note d1 et d 2 ; il en est
de même de la distance de A à B parallèlement au bord de mer, on la note d . On
choisit ensuite l’origine O comme sur la figure (projection de A sur le bord de mer)
et on note x = OI la variable du problème.
&KDSLWUH
Il faut minimiser le temps de parcours T de A à B :
AI IB
T=
+
v1 v2
À l’aide du théorème de Pythagore :
I
0
x
Une dérivée nulle est nécessaire pour que la durée
soit minimale :
dT
x
d−x
=
−
=0
2
2
dx
x + d1 .v1
( d − x )2 + d 22 .v2
59:1
i 1 d1
A•
.65.1
d
sin i1 sin i2
=
v1
v2
:196
soit
6925
2957
9
x 2 + d12
( d − x ) 2 + d 22
+
v1
v2
• B
55.1
T ( x) =
d2 i 2
582:
B′
•
Δ
O
F′
iques
F
:211
0753
•
B
R1′
techn
65. Grandissement imposé
On trace d’abord deux « rayons » R′
2
parallèles à l’axe et à distance d et 2d ;
quelque part sur R1 il y a B et sur R′2 il R1
y a B′ . L’émergent R1′ correspondant à
R2
R1 passe par F ′ , son intersection avec
R′2 donne B′ .
L’incident R 2 correspondant à R′2 passe
8891
2320
ce qui donne une nouvelle interprétation de la loi de Snell-Descartes, résultant d’un
principe plus général appelé « le principe de moindre action ».
Micro
par F , son intersection avec R1 donne B . On en déduit A et A′ par aplanétisme.
R2
la
lentille
R1
•
B
F′
O
Δ
F
ure d
e Mé
caniq
R1′
B′
•
périe
66. Réduction d’un faisceau laser
Avec e = O1O2 = 21 cm , D = 2 mm et d = 0,1 mm , la figure n’est pas à l’échelle.
Pour que le faisceau sortant soit parallèle, le foyer objet F2 de L 2 doit coïncider
tiona
e Na
Écol
2SWLTXHJpRPpWULTXH
le Su
avec le foyer image F1′ de L1 .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
avec
ue e
t des
Même méthode
divergente.
R′2
L1
L2
F1′
D
d
F2
f1′ =
D
e
D+d
f 2′ =
et
59:1
f1′ + f 2′ = O1O2 = e
55.1
D
f 2′ et
d
.65.1
d’où
f1′ =
d
e
D+d
AN : f1′ = 20, 0 cm et
f 2′ = 1, 0 cm
:196
On dispose de deux relations :
D
d
=
O1F1′ F2O2
O2
6925
2973
7
O1
rapport à l’axe vaut ε ≈ 1, 22
2320
Le phénomène mis en jeu est la diffraction. La diffraction à l’infini par une
ouverture circulaire de diamètre D conduit à un faisceau divergent dont l’angle par
λ
318:
8891
, c’est l’angle d’évasement.
D
AN : ε ≈ 3,9.10−4 rad ≈ 1,3 ’ (minutes d’arc).
iques
:211
0428
Après traversée du montage le diamètre du faisceau est divisé par 20, l’angle
d’évasement est donc multiplié par 20 (la diffraction est d’autant plus importante
que l’ouverture est fine) ; le faisceau lumineux à la sortie du montage est donc plus
divergent que le faisceau de sortie du laser, mais cela reste peu visible.
Micro
techn
67. Utilisation inhabituelle d’une lunette (*)
Indication : L’objet est réel, l’œil est en O2 dans le premier cas et en O1 dans le
second, et on a f1′ f 2′ .
ue e
t des
L1
L2
a) L’œil est en O2 , l’objet A est réel proche de O1 : A ⎯⎯
→ A1 ⎯⎯
→ A′
F1′ F2
F1
O1
F2′
Δ
O2
caniq
Si A ∈ [ F1 , O1 ] , A1 ∈ [ − ∞, O1 ] réel pour L2 et éloigné A′ ≈ F2′ l’image est
e Mé
derrière l’œil (en O2 ) ou trop proche pour être vue.
Si A est avant F1 , par exemple jusqu’à O1 A = −2 f1′ , O1 A1 > 2 f1′ et A1 sera virtuel
ure d
pour L2 A′ réelle entre O2 et F2′ , l’image est trop proche pour être vue.
périe
Dans les deux cas, il faudrait placer l’œil à plus de 25 cm (PP) après O2 et très peu
de rayons parviendraient dans l’œil.
e Na
Écol
tiona
le Su
L2
L1
b) La lunette est tenue à l’envers : A ⎯⎯
→ A1 ⎯⎯
→ A′ et l’œil est en O1 .
&KDSLWUH
F2′ F1
F2
F1′
O2
Δ
O1
59:1
55.1
.65.1
virtuelle au-delà du PP pour l’œil en O1 , donc l’image est visible.
Plus précisément, avec les relations de conjugaison :
­ F2 A F2′A1 = − ( f 2′) 2
2
°
F1′A′ ( f1′)
2
°
=
® F1 A1 F1′A′ = − ( f1′)
2
F2 A ( f 2′)
°
°̄ F2′A1 = F1 A1
6925
2973
7
Dans le cas général, A réel peut être considéré comme assez loin, car f1′ f 2′ ,
alors A1 est après F2′ et proche de F2′ A1 réel pour L1 et A1 ∈ [ F1 , O1 ] A′
318:
8891
2320
:196
§ f ·§ F ′A′ ·
f′
Le grandissement est γ = γ 2 γ 1 = ¨ − 2 ¸¨ − 1 ¸ = − 1 .
f1′ ¹
f 2′
© F2 A ¹©
L’image est donc virtuelle, renversée et plus grande que l’objet. Attention ceci ne
signifie pas qu’on la voit plus grande, pour conclure sur l’apparence, il faut
comparer les angles sous lesquels on voit image et objet, ce qui fait intervenir les
distances image-œil ou objet-œil.
r −i
iques
i
H′
F′
e Mé
caniq
ue e
t des
L’axe de la lentille, qui par symétrie contient le foyer image F′ , est dirigé vers la
paille à enflammer. On construit le trajet d’un rayon arrivant parallèlement à l’axe, à
une distance e de l’axe ; les calculs sont menés dans les conditions de Gauss ( e
petit devant R , et les angles i et r petits), même si pour plus de clarté, cela n’est
pas respecté sur la figure.
Le rayon incident HN se réfracte en N en s’écartant de la normale ; son
intersection avec l’axe optique détermine le foyer image F′ .
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
* La relation de Chasles conduit à :
e
OF ′ = OH ′ + H ′F ′ = R cos i +
,
tan( r − i )
R sin i
or e = R sin i , d’où OF ′ = R cos i +
tan( r − i )
ure d
* La loi de Descartes de la réfraction s’écrit en N :
n sin i = sin r , soit dans les conditions de Gauss : ni ≈ r (1)
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
O
techn
e
:211
r
N
H
0428
68. Comment allumer un feu avec de la glace ?
Ri
(2)
r−i
L’élimination de r entre (1) et (2) conduit à la position du foyer image :
et dans les conditions de Gauss : OF ′ ≈ R +
6925
2973
7
nR
n −1
OF ′ ≈
59:1
Rq : Cette distance focale OF ′ est indépendante de e ce qui traduit le stigmatisme
de la lentille demi-boule dans les conditions de Gauss : tout rayon parallèle à
l’axe ( ∀e dans les conditions de Gauss) passe par le foyer image F′ .
.65.1
55.1
AN : Il faut placer la paille en F′ , à environ 28 cm de O .
:196
7UDYDX[SUDWLTXHV
8891
2320
69. Les points de mesures portés sur un graphe sin i en fonction de sin r sont placés
aléatoirement de part et d’autre d’une droite moyenne, ce qui indique un alignement
probable.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0428
318:
Les incertitudes de mesure des angles avec ce dispositif correspondent à l’estimation
faite dans la partie vérification d’une loi physique du chapitre 0 : U de l’ordre de
1,3°, ce qui justifie les écarts à la droite moyenne. La relation est probablement
linéaire, ce qui valide, à la précision de l’expérience, la loi de la
sin i
réfraction :
= cste . Une régression linéaire fournit le coefficient directeur,
sin r
indice du milieu 2 par rapport à l’air : n = 1, 47 . Pour estimer la précision de cette
mesure on peut, la linéarité ayant été établie, estimer graphiquement l’écart entre les
coefficients directeurs
de deux
droites
moyennes plausibles, on
obtient :1, 45 < n < 1, 49 .
&KDSLWUH
6925
2973
7
70. Il suffit d’observer sa main à travers la lentille placée très près ; si elle est agrandie,
la lentille est convergente (cas de la loupe), si elle est rapetissée, elle est divergente
(justification aux questions 29. et 30.). Si la différence de taille n’est pas
appréciable, le test n’est pas concluant, on peut alors observer un objet lointain (à
une distance supérieure a priori à la distance focale inconnue), l’image est droite si
la lentille est divergente, renversée si elle est convergente.
59:1
71. C’est la lentille de plus courte focale qui donne le meilleur grandissement (pour s’en
convaincre, penser au rayon qui passe par le centre de la lentille…).
0428
318:
8891
2320
:196
.65.1
55.1
72. Un dessin établit immédiatement la propriété, indépendante
de la distance lentille-miroir.
Δ
Le calcul montre (on admet ici ce résultat) que récipro- A A′
O
quement la formation de A′ en A, avec un grandissement F
de −1 , ne se produit que si A est en F. Il existe une autre
solution, mais avec un grandissement de +1 et pour une
distance lentille-miroir supérieure à f ′ , ce qui a peu de risque de se produire
expérimentalement.
Cette méthode sert donc à la détermination de la distance focale d’une lentille
convergente (on applique alors le miroir plan contre la lentille) ou pour le réglage à
l’infini de la lunette d’un goniomètre (mettre le réticule dans le plan focal de
l’objectif de la lunette).
70
31,5
13,96
80
42,6
14,33
90
54,3
14,31
sn
f ′ = 14, 2 , s n a = 0,19 t n
130
97,1
14,37
0,19
≈ 0,18
7
caniq
n
120
86,6
14,38
avec un niveau de confiance de 95%
e Mé
14, 0 cm < f ′ < 14, 4 cm
= 2, 45
100
66,2
14,04
ure d
74. La situation est celle de la question 32. où la lentille est dans la position ( L1 ) avec
γ 1 > 1 . Penser à σσ ′ = − f ′2 ; si l’on éloigne l’image du foyer image, alors il faut
e Na
Écol
2SWLTXHJpRPpWULTXH
tiona
le Su
périe
rapprocher l’objet du foyer objet, c’est-à-dire qu’en éloignant l’écran il faut
rapprocher la lentille de l’objet ; la nouvelle image est encore plus grande que la
précédente (attention lorsque la lentille est dans la position ( L2 ) avec γ 1 < 1 , les
résultats sont inversés).
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
60
15,6
13,99
ue e
t des
D (cm)
d (cm)
f’ (cm)
Micro
techn
iques
:211
73. Méthode de Bessel
Pour valider graphiquement la relation il faut se ramener au test d’une relation
linéaire. On peut par exemple tracer D 2 − d 2 en fonction de D, une fois la linéarité
établie, le coefficient directeur donne 4 f ′ (avec une incertitude sur f ′ 4 fois plus
petite que celle sur le coefficient directeur).
On peut aussi, la linéarité ayant été établie ou admise, faire un traitement statistique
avec 7 valeurs :
55.1
D2 − d 2
4D
.65.1
f′=
59:1
6925
2973
7
75. Pour une lentille convergente, on peut avoir une estimation rapide en projetant sur
une feuille l’image d’une source éloignée comme le Soleil ou autre. Il y a mieux :
– la méthode d’autocollimation (voir la question 72.) : rapide et simple, mesure
unique mais la précision peut être améliorée grâce au grandissement de –1.
– les relations de conjugaison : avec une série de mesures, un traitement graphique
est possible, ce qui permet de mieux cerner les incertitudes de mesure. La
méthode est longue et délicate dans les cas où objet et / ou image sont virtuels.
– la méthode de Bessel (voir la question 73.) : pour D > 4 f ′ , si d est la distance
entre les deux positions possibles de la lentille, alors
iques
:211
0428
318:
8891
2320
:196
et une série de mesure permet aussi un traitement graphique ou statistique.
L’avantage décisif de cette méthode provient de la façon de mesurer les distances
sur les bancs d’optique. Dans les méthodes précédentes, on mesure les distances
objet-lentille et écran-lentille, ce qui entraîne une erreur systématique liée à la
position inconnue du centre optique de la lentille réelle (d’épaisseur non nulle).
Dans la méthode de Bessel, on mesure la distance entre deux positions de la
lentille (le décalage systématique se simplifie dans la différence) et la distance
écran-objet qui ne pose pas de problème.
– la méthode de Silbermann : c’est un cas particulier de Bessel, les deux positions
de la lentille sont communes, théoriquement au centre. Curieusement alors que
l’on fait une mesure unique, cette méthode est la plus précise. On recherche
γ = 1 , c’est-à-dire une image de la même taille que l’objet en déplaçant la
lentille et l’écran ; alors
techn
f′= D/4
ue e
t des
Micro
La mesure de D est indépendante de la position réelle de la lentille, on s’affranchit
de l’appréciation de la netteté de l’image. Couramment on constate que lorsque le
grandissement de –1 est réalisé (au mieux par encadrement) la lentille n’est pas
nécessairement en position centrale, mais sa position ne sert pas dans la mesure.
De plus mesurer 4 f ′ permet de diviser l’incertitude de mesure sur la distance D
par 4.
ure d
e Mé
caniq
Pour une d’une lentille divergente, il faut l’associer en doublet accolé avec une
lentille convergente de distance focale connue (ou mesurée) afin que l’ensemble soit
équivalent à une lentille convergente (la vergence est additive). En effet les
méthodes précédentes ne sont valables (à l’exception des relations de conjugaison)
que pour les lentilles convergentes.
e Na
Écol
tiona
le Su
périe
76. En diaphragmant, on améliore effectivement le stigmatisme, mais on augmente aussi
la profondeur de champ (voir la question 57.). La plage, longitudinale, de netteté
relative est alors plus grande et les pointés encore moins précis !
&KDSLWUH
6925
2973
7
&KDSLWUH
$SSURFKHTXDQWLTXH
55.1
/HVFRQVWDQWHV
constante de Planck
célérité de la lumière dans le vide
constante de Boltzmann
59:1
/HVRUGUHVGHJUDQGHXUXWLOHV
:196
.65.1
h = 6,63.10−34 J.s
c = 3,0.108 m.s−1
kB = 1,38.10−23 J.K−1
2320
/·DWRPHHWVHVFRQVWLWXDQWV
charge de l’électron
8891
− e avec e = 1,6.10−19 C
me = 0,91.10−30 kg
(mc2 = 0,51 MeV)
e = 1,6.10−19 C ; 0
M = 1,67.10−27 kg ≈ 1840 me
(Mc2 = 940 MeV)
318:
masse de l’électron
charge du proton ; du neutron
:211
0428
masse du proton ≈ masse du neutron
Micro
techn
iques
/HVSHFWUHpOHFWURPDJQpWLTXHHWO·pQHUJLHGXSKRWRQ
électron-volt
1 eV = 1,6.10−19 J
λ > 0,8 ȝm ; E ≈ 0,1 eV (< 1,5 eV)
infrarouge
0, 4 ȝm < λ < 0,8 ȝm ; E ≈ 1 eV
lumière visible
(1,5 eV < E < 3 eV)
λ < 0, 4 ȝm ; E ≈ 10 eV (> 3 eV)
ultraviolet
10 −12 m < λ < 10−8 m ; E ≈ 10 keV
ue e
t des
rayons X
caniq
/HFRXUVG·DERUG
e Mé
'XDOLWpRQGHSDUWLFXOH
périe
ure d
1. Citer des expériences où la lumière se décrit bien à l’aide d’ondes. Qu’appelle-t-on
lumière monochromatique ?
Situer sur une échelle de longueurs d’onde, les ondes électromagnétiques correspondant à des rayonnements visibles, ultraviolets UV, et infrarouges IR.
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
2. Décrire sommairement l’effet photoélectrique où un électron est extrait d’un métal
par un rayonnement électromagnétique ; quelle est sa caractéristique essentielle ?
Quel autre aspect du rayonnement met-il en évidence ?
6925
2973
7
3. La dualité onde-particule conduit à associer à une onde électromagnétique de
longueur d’onde dans le vide λ , de fréquence ν , un photon d’énergie E . Rappeler
d’abord la relation entre λ et ν ( c est la vitesse de la lumière dans le vide) en
précisant les unités, puis donner la relation (dite de Planck-Einstein) entre E et ν
d’une part, et entre E et λ de l’autre. Quelle est l’unité de la constante de Planck
h ?
.65.1
55.1
59:1
4. La quantité de mouvement (grandeur cinétique liée au mouvement) du photon est
E
; en déduire la longueur d’onde λ de l’onde associée
donnée par la relation p =
c
au photon en fonction de sa quantité de mouvement p .
techn
iques
:211
0428
318:
8891
2320
:196
5. Donner la relation de Louis de Broglie qui conduit à associer à toute particule (et
non seulement au photon) de quantité de mouvement p une onde de longueur
d’onde λ .
Les deux applications numériques suivantes relèvent de la mécanique classique où
la quantité de mouvement et l’énergie cinétique d’une particule de masse m et de
1
vitesse v sont p = mv et Ec = mv 2 (ces formules ne s’appliquent pas pour des
2
particules relativistes).
AN 1 : Calculer λ pour un électron de faible énergie cinétique Ec = 10 eV (c’est
l’énergie d’un électron accéléré par une différence de potentiel de 10 V ).
Citer une application.
AN 2 : Calculer λ pour un objet macroscopique en mouvement comme une balle
de ping-pong de masse m = 2, 3 g à la vitesse v = 5 m.s −1 .
Conséquence ?
Micro
,QWHUSUpWDWLRQSUREDELOLVWH
ue e
t des
6. Quelle différence notoire existe-t-il dans la description de trajectoires de particules
entre la mécanique newtonienne à l’échelle macroscopique et la mécanique
quantique à l’échelle microscopique ?
caniq
7. Décrire qualitativement une expérience d’interférences lumineuses en termes
probabilistes « particule par particule ».
ure d
e Mé
Voir la vidéo de la conférence d’Alain Aspect : « Photon, particule ou onde »
donnée à l’Institut d’Astrophysique le 03/11/2015. Cette vidéo est disponible sur
plusieurs sites.
périe
,QpJDOLWpGH+HLVHQEHUJ 376, e Na
Écol
tiona
le Su
8. Énoncer à l’aide d’une phrase le principe d’incertitude d’Heisenberg. Comment
s’exprime-t-il si, suivant un axe Ox , la position x d’une particule est précisée à Δx
près et la quantité de mouvement p x = mv x à Δp x près ? Commenter cette inégalité.
&KDSLWUH
3DUWLFXOHGDQVXQSXLWVGHSRWHQWLHOLQILQL
6925
2973
7
Une particule de masse m est astreinte à se déplacer librement sur un axe Ox entre
deux points O et A distants de a l’un de l’autre. Cela revient à dire que la particule
est enfermée dans une « boîte » de longueur a avec des murs infiniment hauts.
55.1
59:1
9. Minimum d’énergie
• Tracer l’énergie potentielle souvent appelée potentiel et notée V ( x ) , et en déduire
l’énergie E de la particule en fonction de son énergie cinétique Ec .
• Justifier que le confinement spatial de la particule conduise à une énergie
minimale Emin à évaluer en fonction de = , m et a ; commentaires.
318:
8891
2320
:196
.65.1
10. Quantification des niveaux d’énergie
• Déduire des conditions aux limites que l’état associée à la particule est une
superposition d’ondes stationnaires ; quelle analogie est-il possible d’évoquer ?
• Déterminer l’énergie En du niveau n en fonction de E1 , énergie du niveau
fondamental (à exprimer en fonction des données) et de n ; commentaires.
Comparer Emin et E1 .
:211
0428
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
Micro
techn
iques
Rappelons d’abord qu’historiquement, la théorie ondulatoire de la lumière s’est
développée au début du XIXe siècle (les trous d’Young datent de 1807), donc
bien avant la découverte du caractère électromagnétisme de la lumière (théorie
vers 1865 et production d’ondes électromagnétiques en 1888). L’introduction
des photons et la quantification de l’énergie émise par les atomes datent du
début du XXe siècle.
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
G
Pour une particule de masse m et de vitesse v par rapport à un référentiel, la
quantité de mouvement et l’énergie cinétique dans ce référentiel sont
respectivement en mécanique newtonienne (dite classique) :
G
G
1
p2
p = mv et Ec = mv 2 , soit Ec =
.
2m
2
Pour évaluer la longueur d’onde de de Broglie, ces expressions sont souvent
suffisantes pour une particule matérielle (comme un électron accéléré sous une
faible différence de potentiel, un neutron thermique, un atome froid,…), car
son aspect quantique apparaît d’autant plus qu’elle est à basse énergie (avec
λ = h / p et h en 10−34 , λ est d’autant plus observable que p est petit).
Attention, ces relations ne s’appliquent pas :
* pour les particules matérielles de haute énergie (dites relativistes)
* pour le photon dont la masse est nulle et la vitesse égale à celle de la lumière.
6925
2973
7
Une particule peut être décrite par la mécanique classique lorsque son énergie
cinétique est faible devant son énergie de masse mc 2 (cela revient à dire que sa
vitesse v est faible devant c ). Inversement une particule doit être décrite en
mécanique relativiste lorsque son énergie cinétique dépasse le dixième de son
énergie de masse mc 2 (dans la pratique pour v ≥ c / 10 ). Les questions 27. et
36. précisent ce point.
2320
:196
.65.1
55.1
59:1
L’inégalité d’Heisenberg est connue en français sous l’expression « Relation
d’incertitude… ». Cela ne concerne pas une « incertitude » liée à
l’imperfection des appareils de mesure ou autre, mais bien une
« indétermination » d’origine fondamentale, inscrite dans les lois de la nature ;
il serait plus convenable de parler de « Relation d’indétermination… ».
D’ailleurs Heisenberg lui-même a vite abandonné les mots « Unsicherheit »
(incertitude) et « Ungenauigkeit » (inexactitude) pour n’utiliser que
« Unbestimmtheit » (indétermination).
318:
8891
Il ne faut pas penser que la lumière est de temps en temps, ou par hasard une
onde ou un ensemble de photons. Dans sa dualité, la lumière est en même
temps onde et particules.
techn
iques
:211
0428
– Cependant lorsque la lumière se propage, cette propagation est décrite par
une onde et caractérisée comme telle (réflexion, réfraction, diffusion,
interférences, diffraction…)
– Et lorsque la lumière interagit avec la matière, elle se manifeste photon par
photon. Ceci signifie que le photon se matérialise ou pas, de façon totalement
aléatoire, mais avec une probabilité proportionnelle au carré de l’amplitude du
champ électrique de l’onde associée.
e Mé
caniq
ue e
t des
Micro
Il ne faut pas penser non plus que ce que nous appelons « matière » est
fondamentalement différent de la lumière. Même si cela est peu intuitif à notre
échelle c’est aussi une dualité avec l’onde associée qui caractérise son
mouvement (exemple de la diffraction des électrons dans un microscope
électronique). La lumière a tout de même une particularité : comme les
électrons ou les protons, les photons ont une énergie, une quantité de
mouvement, un moment cinétique, mais ils n’ont pas de masse ; c’est d’ailleurs
cette propriété qui leur permet d’atteindre la vitesse c dans le vide.
ure d
$SSOLFDWLRQVGLUHFWHVGXFRXUV
périe
'XDOLWpRQGHSDUWLFXOH
e Na
Écol
tiona
le Su
11. Quel est l’ordre de grandeur, en électron-volt, de l’énergie d’un photon
correspondant à un rayonnement :
&KDSLWUH
a) visible : λ = 550 nm
c) IR : λ = 10 ȝm ?
b) UV : λ = 100 nm
6925
2973
7
Plus généralement, situer sur une échelle de longueurs d’onde, les ondes
électromagnétiques correspondant à une lumière visible, un rayonnement ultraviolet
UV, un rayonnement infrarouge IR. Y porter également l’échelle correspondante de
fréquence et d’énergie. Comment doit-on justifier les dénominations « infra » et
« ultra » ?
55.1
59:1
12. Dans l’effet photoélectrique avec une plaque de zinc, le travail d’extraction est
WS = 4,3 eV ; rappeler cette notion et indiquer dans quel domaine se situe le seuil
λS en longueur d’onde ? Quel type de source peut-on choisir ? Qu’observe-t-on en
prenant comme source une lumière rouge d’un laser très puissant ?
2320
:196
.65.1
13. Le cyclotron industriel Cyclone® 30 permet d’accélérer des ions jusqu’à 30 MeV.
Calculer la longueur d’onde de de Broglie s’agissant d’un faisceau de protons
d’énergie E = 10 MeV . Quel est l’intérêt d’avoir des hautes énergies ?
0428
318:
8891
14. Par rapport à la balle de ping-pong traitée à la question 5., lequel de ces deux objets
macroscopiques a le plus de chance de manifester son aspect ondulatoire ?
• un grain de poussière (de diamètre 1 ȝm ), de masse m = 10−7 g animé d’une
vitesse v = 1 mm.s −1
• une voiture roulant à grande allure (proposer une application numérique) ?
ue e
t des
Micro
techn
iques
:211
15. Un neutron thermique est un neutron de faible énergie. Si l’on note m sa masse et v
sa vitesse, son énergie cinétique moyenne d’agitation thermique à la température
absolue T est donnée par la relation :
1 2 3
mv = k BT
2
2
où k B = 1, 38.10−23 J.K −1 est la constante de Boltzmann et m = 1, 67.10−27 kg .
Exprimer la longueur d’onde associée à un tel neutron en fonction de la température
puis faire l’application numérique pour une température T = 300 K (soit 27 °C ).
Expliquer pourquoi et comment ces neutrons peuvent conduire à une diffraction.
,QWHUSUpWDWLRQSUREDELOLVWHHWLQpJDOLWpGH+HLVHQEHUJ 376, ure d
e Mé
caniq
16. Reprendre le grain de poussière de la question 14. de masse m = 0,1 ȝg ; on
souhaite préciser son abscisse à ± 0,1 ȝm près sur l’axe Ox . Évaluer l’imprécision
sur la vitesse v x de ce grain et commenter ce résultat.
Justifier pour cette application numérique le choix du grain de poussière et non de la
balle de ping-pong ou de la voiture également traitées précédemment.
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
17. Dans le modèle de Bohr (prendre le cas d’un atome d’hydrogène), l’électron décrit
une trajectoire circulaire de rayon r et de quantité de mouvement p = mv autour du
proton. Les orbites permises vérifient néanmoins une règle de quantification (du
moment cinétique) : r p = n = (nécessaire à l’obtention des niveaux d’énergie).
6925
2973
7
• Rappeler la relation d’incertitude entre Δr et Δp , et en déduire une inégalité
Δr
Δp
et
compte tenu de la règle de quantification.
entre
r
p
• Pour qu’on puisse parler de l’électron en termes classiques, quelles inégalités fautil imposer aux indéterminations Δr et Δp sur sa position et sa quantité de
mouvement ?
Les deux résultats sont-ils compatibles ? Que peut-on en déduire ?
.65.1
55.1
59:1
18. Dans une expérience de diffraction d’une onde de longueur d’onde λ par une fente
fine F de largeur a suivant Ox , la lumière se répartit derrière la fente (sur un écran
E ) dans un cône dont le demi-angle θ0 au sommet est donné par la formule vue au
chapitre 1. : sin θ0 = λ / a .
F
2θ0
O
Micro
3DUWLFXOHGDQVXQSXLWVGHSRWHQWLHOLQILQL
E
techn
iques
a
0428
x
:211
laser
318:
8891
2320
:196
Montrer comment le principe d’incertitude d’Heisenberg permet de retrouver ce
résultat dans le cadre d’une interprétation corpusculaire de la lumière.
ue e
t des
19. On piège une particule de masse m = 10 −30 kg dans un puits d’extension
a = 1,5.10−10 m . Calculer l’énergie de l’état fondamental et faire un commentaire
sur la situation décrite et l’ordre de grandeur obtenu.
e Mé
caniq
20. Dans un noyau atomique, un nucléon peut se déplacer suivant un diamètre, soit sur
une distance d’environ a = 5.10 −15 m (5 fermis). Le nucléon est ainsi emprisonné
dans le noyau du fait de l’interaction, dite forte, entre le nucléon considéré et les
( A − 1 ) autres nucléons. Calculer les niveaux d’énergie En du nucléon de masse
ure d
m = 1, 67.10−27 kg dans ce modèle.
e Na
Écol
tiona
le Su
périe
21. Reprendre le grain de poussière (de diamètre 1 ȝm ) de la question 14. de masse
m = 0,1 ȝg animé d’une vitesse v = 1 mm.s −1 . On l’enferme dans un boîte de
largeur a = 0,1 mm (100 fois sa taille).
• Comparer sa longueur d’onde de de Broglie à la dimension de la boîte et conclure.
&KDSLWUH
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
6925
2973
7
• Donner l’expression de ses niveaux d’énergie, comparer à son énergie cinétique et
retrouver n .
• Pourquoi a-t-on l’impression que l’énergie du grain de poussière est continue ?
55.1
59:1
22. Quelle différence essentielle existe-t-il en salle de TP d’optique entre le spectre émis
par une lampe à vapeur de mercure (par exemple) et une lampe blanche de type
quartz-iode ?
2320
:196
.65.1
23. Un gaz chauffé dans une ampoule scellée passe dans un état excité. Lors de la
désexcitation il y a émission d’une onde lumineuse. Dans le cas du néon, l’émission
correspond à une transition électronique entre deux niveaux atomiques séparés de
1,75 eV. Calculer la longueur d’onde correspondante. De quelle gamme du spectre
électromagnétique s’agit-il ? Justifier alors pourquoi les tubes fluorescents à usage
domestique – dits tubes néon – ne contiennent en réalité pas de néon.
8891
24. Qu’est-ce qui permet à un serpent crotale de chasser par une nuit obscure ?
:211
0428
318:
25. À quelles couleurs correspondent les longueurs d’onde suivantes : 0, 4 ȝm ;
0,55 ȝm ; 0, 7 ȝm ? Quelle est l’origine des abréviations Na et Hg marquées sur
les lampes spectrales ? Quelle est la longueur d’onde de la raie rouge du laser HeNe ?
Micro
techn
iques
26. Intensité lumineuse et flux de photons
On réduit l’intensité d’un faisceau lumineux (en optique par exemple) en interposant
sur son trajet un milieu partiellement absorbant ; décrire cette réduction d’intensité
en termes corpusculaires (les photons).
Même question, en l’absence de milieu absorbant, si on ferme davantage un
diaphragme à iris placé sur l’axe d’un faisceau parallèle pour en réduire le diamètre.
caniq
ue e
t des
27. La relativité restreinte (Einstein 1905) conduit à une relation générale entre l’énergie
E d’une particule, sa quantité de mouvement p (une grandeur cinétique liée à son
mouvement) et sa masse m :
E 2 = p 2c 2 + m2c 4
ure d
e Mé
* À quel résultat conduit cette relation dans le cas d’une particule de masse nulle
comme le photon ? En déduire alors la relation entre la longueur d’onde λ de
l’onde associée au photon et sa quantité de mouvement p .
* Quelle est l’énergie (dite énergie de masse) d’une particule de masse m au repos ?
Calculer l’énergie de repos d’un électron, d’un proton en les exprimant en eV.
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
28. En 1926 Davisson et Germer montrent expérimentalement qu’un pinceau
d’électrons réfléchis par la surface d’un cristal de nickel donnait, sur une plaque
photographique, des taches de diffraction analogues à celle que von Laue avaient
observées pour les rayons X. Que prouvent ces expériences ?
29. Comment expliquer la course au gigantisme des accélérateurs de particules depuis
plusieurs dizaines d’années ?
.65.1
55.1
59:1
6925
2973
7
30. Un canon à électrons (obtenus par thermoémission) fourni un faisceau d’électrons
accélérés sous une différence de potentiel U de
quelques dizaines de volts et qui bombarde un
échantillon de matière. Derrière l’échantillon, on
U
observe une série d’anneaux.
De quel phénomène s’agit-il ? En augmentant la tension d’accélération U , prédire
comment évolue le rayon des anneaux (l’énergie cinétique acquise par un électron
est | eU | ).
2320
:196
31. Citer un fait expérimental qui a conduit à l’hypothèse de quantification de l’énergie
d’une particule confinée dans l’espace.
8891
([HUFLFHV
techn
iques
:211
0428
318:
32. Flux de photons dans un faisceau laser
Un laser Hélium-Néon émet une lumière rouge quasi monochromatique de longueur
d’onde dans le vide λ = 633 nm . La puissance P du faisceau est de 1, 0 mW
(comme en salle de TP), la section circulaire du faisceau a un diamètre d = 2,0 mm .
a) Déterminer en J et en eV l’énergie E d’un photon.
b) Calculer la puissance surfacique ϕ qui traverse la section.
c) Quel est le flux N t de photons, c’est-à-dire le nombre de photons par seconde
dans le faisceau ?
ue e
t des
Micro
33. La lumière ultraviolette en chimie
En chimie organique, les énergies des liaisons simples entre deux atomes dans une
molécule sont de l’ordre de E0 = 350 kJ.mol −1 (à titre documentaire 348 pour une
liaison C–C, 308 pour une liaison C–N, 413 pour une liaison C–H) ; rappelons qu’il
s’agit de l’énergie minimale à fournir pour rompre une mole de liaisons.
e Mé
caniq
a) Quelle relation doit vérifier la longueur d’onde d’une lumière capable de rompre
les molécules organiques ? Faire l’application numérique en utilisant la constante
d’Avogadro N A = 6, 02.1023 mol −1 et les valeurs données dans la rubrique « Les
ordres de grandeur utiles » en début de chapitre.
e Na
Écol
tiona
le Su
périe
ure d
b) La chirurgie réfractive de l’œil qui consiste à retoucher la cornée en vaporisant sa
surface a vraiment connu son essor à partir de l’utilisation des lasers UV
impulsionnels (appelés laser excimer) dans les années 1990.
Expliquer pourquoi de telles interventions ne sont pas envisageables avec un
laser émettant dans le domaine visible.
&KDSLWUH
c) Plus généralement en chimie, justifier le rôle particulier du rayonnement de
courte longueur d’onde dans de nombreuses réactions, comme de nombreuses
polymérisations par exemple.
8891
2320
:196
.65.1
55.1
59:1
6925
2973
7
34. La série de Balmer de l’hydrogène
La transition d’un électron de l’atome d’hydrogène d’une couche de nombre
quantique principal m vers une couche de nombre quantique n < m s’accompagne
de l’émission d’un rayonnement électromagnétique dont l’énergie est égale à l’écart
1 ·
§ 1
énergétique entre ces niveaux : Em − En = E0 ¨ 2 − 2 ¸ où E0 = 13, 6 eV
©n m ¹
correspond à l’énergie d’ionisation (expression établie à l’exercice 49. du chapitre
8.).
a) Donner l’expression de la longueur d’onde λm→n correspondante en introduisant
la constante de Rydberg R H = E0 / hc .
b) La série de Balmer correspond au retour de l’électron sur le niveau de nombre
quantique principal n = 2 . Calculer la plus courte longueur d’onde observable et
la plus longue. À quel domaine du spectre électromagnétique appartiennentelles ?
297
UV
1,89
334
UV
1,43
365
UV
1,11
405
violet
0,77
techn
Ec (eV)
254
UV
2,60
Micro
λ (nm)
iques
:211
0428
318:
35. Effet photoélectrique
Il est recommandé d’avoir vu les questions 2. et 12. avant d’aborder cet exercice.
Une photocathode en potassium est éclairée par une lampe spectrale au mercure. On
utilise différents filtres optiques afin de sélectionner à chaque fois une longueur
d’onde λ émise par la lampe, et on mesure l’énergie cinétique maximale Ec des
électrons produits par effet photoélectrique.
Les résultats sont regroupés dans le tableau ci-dessous :
436
indigo
0,55
546
vert
rien
577/579
jaune
rien
caniq
ue e
t des
a) Ces énergies cinétiques sont-elles modifiées lorsqu’on augmente la puissance
émise par la lampe ?
b) Déterminer la valeur de la constante de Planck h .
c) Pourquoi n’observe-t-on rien avec la raie verte et les raies jaunes du mercure ?
Calculer le travail d’extraction WS des électrons du potassium.
e Mé
d) En déduire la longueur d’onde maximale λ S qui permet d’obtenir un effet photoélectrique sur le potassium.
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
ure d
36. Longueurs d’onde associées à des électrons
Rappeler en eV l’énergie de masse (ou énergie de repos) mc 2 d’un électron.
a) Un électron accéléré par une différence de potentiel de 40 V possède une énergie
cinétique Ec = 40 eV . Cet électron est-il classique ou relativiste ? Que vaut sa
quantité de mouvement p ? Calculer la longueur d’onde λ associée à cet
électron. Pour quel type d’applications peut-on l’utiliser ?
b) Un électron accéléré par un accélérateur de particules puissant possède une
grande énergie E = 1 GeV . Cet électron est-il classique ou relativiste ? Que vaut
6925
2973
7
sa quantité de mouvement p donnée par la formule E 2 = p 2 c 2 + m 2 c 4 . Calculer
la longueur d’onde λ associée à cet électron. Pour quel type d’applications peuton l’utiliser ?
:211
0428
318:
8891
2320
:196
.65.1
55.1
59:1
37. Exemples de puits de potentiel « infini »
Dans chacun des cas, l’espace est modélisé par un puits quantique rectangulaire à
une dimension et de profondeur infinie.
a) Un électron dans un atome
Déterminer les valeurs en eV des trois premiers niveaux d’énergie d’un électron
confiné dans un puits infini de largeur a = 0, 2 nm (taille caractéristique d’un
atome). Calculer la longueur d’onde du rayonnement émis lors des transitions
3 → 1 et 2 → 1 .
b) Un proton dans un noyau
Déterminer les valeurs en MeV des trois premiers niveaux d’énergie d’un proton
confiné dans un puits infini de largeur a = 5, 0 fm (taille caractéristique d’un
noyau). Calculer la longueur d’onde du rayonnement émis lors des transitions
nucléaires 3 → 1 et 2 → 1 .
c) Un électron dans une structure solide
Un laser à rubis émet une radiation de longueur d’onde λ = 694, 3 nm .
En admettant que cette émission est due à la transition 2 → 1 d’un électron
confiné dans un puits infini de largeur a , calculer la valeur numérique de a .
iques
4XHVWLRQVRXYHUWHV
e Mé
caniq
ue e
t des
Micro
techn
38. Quantification du moment cinétique orbital de l’électron atomique
Dans le modèle de Bohr dans lequel un électron atomique de masse m décrit autour
du noyau une trajectoire circulaire de rayon r à la vitesse v , on appelle moment
cinétique la quantité σ = mrv . Pour expliquer la quantification des énergies
rayonnées par les atomes, Niels Bohr a supposé que ce moment était quantifié et
donc ne pouvait prendre qu’une suite de valeurs σ n = n= où n ∈ `* est le nombre
quantique principal et = = h / 2π .
Montrer que cette quantification conduit à une relation simple entre la longueur
d’onde de de Broglie associée à l’électron et la circonférence de la trajectoire
circulaire. L’illustrer sur une figure en prenant par exemple n = 7 et faire le lien
avec un résultat du chapitre 1. sur les ondes.
périe
ure d
39. Relation d’indétermination et incertitude (PTSI)
On utilise l’appareil photo de la question 57. du chapitre 2. La taille d’un pixel du
capteur est a = 6, 0 ȝm , le temps de pose τ = 1 / 2800 s et en mode rafale
l’appareil prend 5 images par seconde. Avec l’objectif de focale 50 mm, on fait la
mise au point sur un coureur de 100 m, de masse m = 80 kg , situé à L = 30 m et
e Na
Écol
tiona
le Su
se déplaçant perpendiculairement à l’axe optique avec une vitesse V = 10 m.s −1 .
&KDSLWUH
Quelles sont les incertitudes minimales sur les mesures de la position, de la vitesse
et de la quantité de mouvement du coureur avec cet appareil ? Faire l’application
numérique et conclure.
55.1
59:1
6925
2973
7
40. Énergie des électrons d’un microscope électronique (*) (PTSI)
Dans un microscope électronique, l’échantillon mince à cartographier est traversé
par un faisceau d’électrons ; l’image électronique est ensuite transformée en image
optique. La résolution de 0,11 nm qui permet de « voir » la position des atomes
n’est pas limitée par la longueur d’onde de de Broglie des électrons mais par les
aberrations du dispositif.
Quelle information sur l’énergie des électrons de ce microscope peut-on en
déduire ?
.65.1
Données : l’indétermination Δ p sur une grandeur p est liée à sa valeur moyenne
p et celle de son carré p 2 par la relation : ( Δ p ) = p 2 − p .
2
:196
2
CH
CH 2
0428
318:
8891
2320
41. Délocalisation d’électrons dans une molécule organique (*)
Le buta-1,3-diène est un hydrocarbure gazeux de
CH
formule brute C4 H 6 ; ci-contre une des formules
développées mésomères.
Évaluer l’ordre de grandeur de la longueur d’onde H 2C
d’absorption de cette molécule et citer le domaine
d’onde concerné.
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
Données : En chimie organique il y a possibilité de délocaliser les électrons π des
doubles liaisons sur l’ensemble des 3 liaisons de la molécule ; longueur
d’une liaison simple et d’une double liaison : 154 pm et 134 pm ; deux
électrons de spin opposé peuvent coexister sur un même niveau
d’énergie.
ue e
t des
caniq
e Mé
ure d
périe
le Su
tiona
e Na
Écol
318:
0428
:211
iques
techn
Micro
:196
2320
8891
.65.1
55.1
59:1
6925
2973
7
6925
2973
7
5pSRQVHVDX[TXHVWLRQV
/HFRXUVG·DERUG
55.1
59:1
'XDOLWpRQGHSDUWLFXOH
8891
2320
:196
.65.1
1. Les expériences d’interférences (lumière + lumière = 4 fois lumière ou lumière +
lumière = obscurité) ou de diffraction de la lumière se décrivent et se comprennent
facilement par le caractère ondulatoire de la lumière comme cela a été vu au chapitre
1.. La lumière monochromatique est constituée d’une seule couleur du spectre (par
opposition à la lumière blanche), à laquelle on attribue une longueur d’onde λ qui
est celle de la période spatiale de l’onde électromagnétique progressive se
propageant dans le vide à la célérité c = 3.108 m.s −1 .
0428
318:
L’ultraviolet (UV) s’étend en gros de 10 nm à 400 nm = 0, 4 ȝm , le spectre visible
de 400 nm = 0, 4 ȝm à 800 nm = 0,8 ȝm , et l’infrarouge (IR) de 0,8 ȝm à
1 000 ȝm = 1 mm . Un diagramme plus complet est proposé à la question 11..
3. C’est la relation pour les ondes vue au chapitre 1. :
c
ν
caniq
avec λ en m, c en m.s–1 et ν en Hz.
λ=
e Mé
La relation de Planck-Einstein donnant l’énergie d’un photon en fonction de la
fréquence ν ou de la longueur d’onde λ de l’onde associée est :
ure d
hc
λ
périe
E = hν =
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
avec h la constante de Planck : h = 6, 63.10 −34 J.s (la notation h vient de l’initiale
du mot allemand « Hilfe » signifiant « à l’aide » car Planck au début ne comprenait
pas l’origine de la quantification...
5pSRQVHVDX[TXHVWLRQV
ue e
t des
Micro
techn
iques
:211
2. L’effet photoélectrique (Hertz 1887) consiste en l’émission d’électrons par un métal
recevant un rayonnement électromagnétique. Il se produit par exemple pour une
lame de zinc éclairée par des radiations ultraviolettes, mais ne se produit pas lorsque
cette même lame est éclairée par de la lumière visible, même pour un faisceau
intense. La caractéristique essentielle du phénomène réside dans l’existence d’un
seuil ν S pour la fréquence ν du rayonnement reçu, en l’occurrence ν > ν S .
L’existence de ce seuil montre que le rayonnement (ultraviolet, lumière ou autre) se
comporte alors comme des petits grains d’énergie, appelés photons, ce qui met en
évidence l’aspect corpusculaire de la lumière. Les photons sont sans masse et
voyagent à la célérité de la lumière.
Elle montre que les échanges d’énergie entre le rayonnement et la matière ne se font
pas de manière continue mais par quantités élémentaires d’énergie proportionnelles
à la fréquence du rayonnement ; on dit que les échanges sont quantifiés.
59:1
6925
2973
7
4. Avec la relation de la question précédente, la quantité de mouvement du photon
s’écrit :
h
E hν h
=
λ=
p= =
p
c
c λ
:196
.65.1
55.1
5. Louis de Broglie a généralisé en 1923 la relation précédente à toute particule (y
compris matérielle, classique ou relativiste) ; elle conduit à associer à une particule
de quantité de mouvement p (aspect corpusculaire) une onde de longueur d’onde λ
(aspect ondulatoire) :
h
λ=
p
:211
0428
318:
8891
2320
Les deux aspects onde (onde de matière) et particule sont complémentaires.
1
p2
p = 2mEc = 1, 7.10−24 kg.m.s −1
AN 1 : Ec = mv 2 =
2
2m
et λ = 3,9.10 −10 m = 0,39 nm
Cette longueur d’onde est du même ordre de grandeur que la taille des
atomes. Il y a donc possibilité de diffraction des électrons de cette gamme
d’énergie par des mailles cristallines (comme pour les rayons X), permettant
l’accès à la structure de la matière à très petite échelle.
techn
iques
AN 2 : Pour un objet du monde macroscopique, la balle de ping-pong :
p = mv = 1,1.10 −2 kg.m.s −1 et λ = 6.10−32 m .
Cette longueur d’onde est infime par rapport à tout ce qui existe ; l’aspect
ondulatoire du mouvement de la balle de ping-pong est donc indécelable.
Micro
,QWHUSUpWDWLRQSUREDELOLVWH
périe
ure d
e Mé
caniq
ue e
t des
6. En mécanique classique, à l’échelle macroscopique, la trajectoire d’un mobile
(position et vitesse) est parfaitement connue ; cela signifie qu’à un instant donné, il
est possible de préciser simultanément la position et la vitesse du mobile, sousentendu avec une précision théorique parfaite, limitée seulement par les possibilités
de mesures.
En mécanique quantique, à l’échelle microscopique, ces certitudes doivent être
abandonnées (en particulier la notion de trajectoire n’a plus de sens) et il convient de
parler de probabilité de présence. Par exemple on ne peut pas attribuer à un électron
une trajectoire autour du noyau ; comme dans le cours de chimie, on parle alors
d’orbitales pour lesquelles il faut évoquer la probabilité de présence de l’électron.
e Na
Écol
tiona
le Su
7. L’expérience d’interférences lumineuses est la suivante : une fente source fine F de
direction l’axe Y éclaire un cache opaque dans lequel sont disposées deux fentes
fines F1 et F2 (les fentes d’Young) de même direction que F . L’observation se fait
&KDSLWUH
.65.1
55.1
59:1
6925
2973
7
sur un écran E placé en arrière, le long d’un axe x perpendiculaire à l’axe des
fentes. C’est la diffraction qui permet le recouvrement des faisceaux après les fentes.
On observe suivant l’axe x des franges plus ou moins lumineuses parallèles à la
direction des fentes. En description ondulatoire, les ondes issues de F1 et F2
interfèrent en chaque point M de l’écran E et l’intensité lumineuse observée
dépend de leur déphasage :
– si les deux ondes arrivant en M sont en phase alors :
lumière + lumière = 4 × lumière
les amplitudes s’ajoutent et l’intensité lumineuse (proportionnelle au carré de
l’amplitude) est 4 × celle d’une onde seule : on observe une frange brillante,
– si les deux ondes arrivant en M sont en opposition de phase alors :
lumière + lumière = obscurité
les amplitudes s’annulent et l’intensité lumineuse est nulle : on observe une frange
sombre.
2320
:196
y
Y
X
F2
F1
E
0428
F
318:
8891
x
Micro
techn
iques
:211
Lorsque l’une des deux fentes est obstruée, on obtient sur l’écran une intensité
uniforme I i (en pratique, il s’agit de la répartition de l’intensité lumineuse
correspondant à la figure de diffraction de la fente ouverte). En revanche, lorsque les
deux fentes sont ouvertes, on observe sur l’écran une répartition de l’intensité
I ( x ) ≠ I 1 + I 2 : l’intensité de la somme n’est pas la somme des intensités.
5pSRQVHVDX[TXHVWLRQV
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Comment peut-on expliquer ce phénomène dans le cadre d’une théorie purement
corpusculaire ? Pour cela on émet les photons un par un et on place devant l’écran
une caméra CCD ultra-sensible enregistrant le phénomène :
– pour un temps de pose suffisamment court pour que le nombre de photons reçu
sur la caméra soit faible, on constate que chaque photon produit un impact bien
localisé et non pas une figure d’interférence de faible intensité !
55.1
59:1
6925
2973
7
– pour un temps de pose suffisamment long pour recevoir un grand nombre de
photons, la caméra montre que les franges n’ont pas disparu.
:196
.65.1
En réalité, on observe que les photons (qui n’interagissent pas entre eux) arrivent de
manière aléatoire sur la caméra, chacun produisant un impact localisé, et ce n’est
que lorsqu’un grand nombre d’entre eux est arrivé sur le détecteur que se reconstitue
la figure d’interférence.
8891
2320
On peut voir cette expérience « en direct » pendant la conférence d’Alain Aspect
citée dans l’énoncé.
:211
0428
318:
Elle est également décrite dans la thèse de Vincent Jacques, LPQM, ENS-Cachan,
disponible sur « Thèses en ligne » à :
http://tel.archives-ouvertes.fr/tel-00281163/document, pages 40 et 41
Une animation intéressante se trouve sur le site Université de Paris Sud, CNRS :
http://toutestquantique.fr/dualite/
ue e
t des
Micro
techn
iques
Conclusion : les photons étant tous émis de la même manière et cependant n’arrivant
pas tous au même endroit sur l’écran, on peut seulement dire que la probabilité
qu’ils frappent l’écran en x est proportionnelle à l’intensité I ( x ) . Cela conduit à
abandonner la notion de trajectoire du photon et en particulier à ne pas se poser la
question de savoir par quelle fente est passé le photon.
Les prévisions sur le comportement d’un photon ne peuvent être que du type
probabiliste.
Les aspects corpusculaire et ondulatoire de la lumière sont inséparables puisque la
lumière se comporte à la fois comme une onde et un corpuscule.
caniq
LQpJDOLWpGH+HLVHQEHUJ 376, périe
ure d
e Mé
8. Le principe d’indétermination d’Heisenberg (1925) affirme qu’il est impossible de
connaître simultanément la position et la quantité de mouvement d’une particule
avec une précision parfaite.
Si la position x est précisée à Δx près et la quantité de mouvement p x à Δp x près,
alors :
=
ΔxΔp x ≥
2
e Na
Écol
tiona
le Su
où = = h / 2π est la constante de Planck réduite (divisée par 2π ).
&KDSLWUH
6925
2973
7
On voit bien que plus on cherche à préciser la position par exemple ( Δx diminue),
moins bien sera connue la quantité de mouvement ( Δp x augmente) et inversement.
Si à l’échelle microscopique, les indéterminations sont importantes, elles sont, vu la
petitesse de = , trop faibles à l’échelle macroscopique pour être décelées par les
moyens de mesure, et la mécanique classique reste alors parfaitement adaptée.
Rq : = reste une limite inférieure ; il existe des cas où le produit ΔxΔpx peut être
plus grand (comme à la question 9.)
9. Minimum d’énergie
55.1
59:1
3DUWLFXOHGDQVXQSXLWVGHSRWHQWLHOLQILQL
0
O
318:
boîte, on en déduit E = Ec , l’identité entre
l’énergie de la particule et son énergie cinétique.
8891
2320
:196
.65.1
V ( x)
∞
• Le potentiel V ( x ) est celui tracé ci-contre : il est
nul dans la boîte où la particule se déplace
librement et infini sur les bords car elle est
emprisonnée entre deux murs de hauteur
infranchissable. On parle de particule dans un
puits de potentiel infini.
Comme E = Ec + V ( x ) , et que V ( x ) = 0 dans la
a
A
x
caniq
ue e
t des
En mécanique classique, une particule peut prendre toutes les énergies possibles
(y compris l’énergie nulle lorsqu’elle est au repos). En mécanique quantique,
l’énergie de la particule ne peut être nulle car il en serait de même de la quantité
de mouvement et Δp x = 0 (absence d’indétermination) est incompatible avec le
principe d’indétermination d’Heisenberg. Par ailleurs il apparaît que cette énergie
minimale est d’autant plus importante que la particule est davantage confinée ( a
petit).
périe
ure d
e Mé
Rq : Cette valeur est bien un minimum fixé par la relation d’indétermination,
mais ce minimum n’est pas forcément atteint. Pour s’en convaincre ici, il
suffit d’observer le résultat de la question suivante qui donne la valeur
exacte de Emin et qui est notablement plus grande que la précédente.
10. Quantification des niveaux d’énergie
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
• À cause de la structure du potentiel, la particule reste confinée entre O et A : sa
probabilité de présence est nulle à l’extérieur du puits.
5pSRQVHVDX[TXHVWLRQV
Micro
techn
iques
:211
0428
• On utilise la relation de Heisenberg : ΔxΔp x ≥ = / 2 , avec une localisation de la
=
=
=
.
particule en x sur l’intervalle ]0, a[ soit Δx = a , il vient Δp x ≥
2 Δx 2 a
p2
, on en déduit l’énergie minimale de la particule :
Et puisque E = Ec =
2m
( Δp x ) 2
=2
h2
=
=
Emin =
2m
8ma 2 32π 2 ma 2
λ
, n ∈ `* (1)
2
• La longueur d’onde associée à la particule est donnée par la relation de Louis de
Broglie :
h
h
p2
λ= =
(2) puisque E = Ec =
p
2m
2mE
d’où l’énergie E notée En par élimination de λ entre les relations (1) et (2) :
E1 =
h2
π 2= 2
=
8ma 2 2ma 2
2320
avec
:196
En = n 2 E1 , n ∈ `*
.65.1
55.1
59:1
a=n
6925
2973
7
L’onde associée se réfléchit sur chaque extrémité et il apparaît une onde
stationnaire dont les deux points O et A sont des nœuds comme les extrémités
d’une corde vibrante fixée aux deux bouts immobiles. L’amplitude de l’onde est
nulle en ces deux points par nullité de la probabilité de présence aux extrémités.
Si a est la largeur du puits, le système d’ondes stationnaires ne peut s’établir qu’à
la condition (vue au chapitre 1.) :
iques
:211
0428
318:
8891
La particule liée possède des niveaux d’énergie quantifiés, ce qui signifie que
l’énergie ne peut prendre que des valeurs discrètes.
La quantification des niveaux d’énergie
indique que le système réagit comme un
résonateur à fréquences multiples. Chaque En
onde stationnaire (pour n différent) détermine
n=3
un état énergétique différent, comme on 9E1
observe divers modes de vibration stationnaire
d’une corde vibrante. L’état le plus général est
une superposition d’ondes stationnaires.
On s’aperçoit qu’à un facteur 4π 2 près, E1 4E
n=2
techn
1
coïncide avec Emin , avec bien sûr la relation
e Mé
caniq
ue e
t des
Micro
d’ordre E1 ≥ Emin en accord avec le principe
E1
n =1
d’Heisenberg (en fait la résolution de
l’équation
de
Schrödinger
confirme
a x
0
l’expression exacte de E1 , alors que Emin est
une valeur approchée).
E1 est en 1 / a 2 , c’est donc bien la localisation dans le puits qui entraîne une
valeur non nulle du plus bas niveau d’énergie ; il s’agit là d’un phénomène
purement quantique.
ure d
$SSOLFDWLRQVGLUHFWHVGXFRXUV
périe
'XDOLWpRQGHSDUWLFXOH
e Na
Écol
tiona
le Su
11. L’énergie E d’un photon est relié à la longueur d’onde λ par la relation :
E = hν = hc / λ
&KDSLWUH
6925
2973
7
En exprimant E en eV et λ en nm, il vient la formule semi-numérique :
E = 1 241/ λ
a) visible : E = 2, 25 eV b) UV : E = 12, 4 eV c) IR : E = 0,12 eV
De manière générale, on peut retenir :
10 eV pour l’UV, 1 eV pour le visible et 0,1 eV pour l’IR.
L’ultraviolet (UV) s’étend en gros de 10 nm à 400 nm = 0, 4 ȝm , le spectre visible
de 400 nm = 0, 4 ȝm à 800 nm = 0,8 ȝm , et l’infrarouge (IR) de 0,8 ȝm à
1 000 ȝm = 1 mm . La fréquence et l’énergie des photons correspondant aux limites
59:1
du domaine visible sont ν = 3, 7.1014 Hz et E = 1, 6 eV pour le rouge et
lumière
visible
:196
infrarouge
λ ((ȝm)
ȝm)
0,8
ν (Hz)
7,5.1014
3, 7.1014
E (eV)
3,1
1, 6
318:
8891
0, 4
2320
ultraviolet
.65.1
55.1
ν = 7,5.1014 Hz et E = 3,1 eV pour le violet.
:211
0428
Les dénominations « infra » et « ultra » sont relatives à la fréquence ou à l’énergie
par rapport au domaine visible, et non pas à la longueur d’onde (ici donnée dans le
vide).
techn
iques
12. L’effet photoélectrique (émission d’électrons par un métal recevant un rayonnement
électromagnétique) ne se produit que si les photons associés à l’onde incidente ont
une énergie suffisante :
E = hν > hν S = WS
Micro
WS étant l’énergie nécessaire pour extraire un électron (travail d’extraction).
e Mé
caniq
des métaux. Il suffit de prendre pour source une lampe à vapeur de mercure
qui contient des rayonnements ultraviolets.
Avec un laser rouge, même très puissant, aucun électron n’est émis ! Car pour un
laser He-Ne émettant dans le rouge vers λ = 0,63 ȝm , on a λ > λS ou encore
ure d
ν < ν S soit E < WS , l’énergie d’un photon n’est pas suffisante pour extraire un
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
électron et ceci quelle que soit l’intensité (le nombre de photons par unité de surface
et de temps) du faisceau lumineux (voir à ce sujet les questions 26. et 32.).
5pSRQVHVDX[TXHVWLRQV
ue e
t des
L’inégalité précédente se réécrit avec la longueur d’onde :
hc hc
hc
>
= WS λ < λS =
E=
λ λS
WS
AN : λ < λS = 0, 29 ȝm ; ce domaine est dans l’ultraviolet comme pour la plupart
13. La quantité de mouvement est p = mv . Pour des particules libres, l’énergie est
1 2 p2
. Le proton n’est pas relativiste car E 0 = m c 2 = 940 MeV .
mv =
2
2m
h
La relation de de Broglie λ = conduit alors directement à :
p
h
λ=
2mE
6925
2973
7
E = Ec =
59:1
reliant la longueur d’onde de de Broglie à l’énergie de la particule.
2320
:196
.65.1
55.1
Avec E = 10 MeV , m p = 1,67.10−27 kg il vient λ = 9, 06 × 10 −15 m , soit une
longueur d’onde de la taille d’un noyau atomique...
Or la taille de ce que l’on peut « sonder » dans la matière est de l’ordre de la
longueur d’onde ou plus. Les constituants les plus infimes de la matière ne peuvent
donc être étudiés que par des longueurs d’onde très courtes, donc des particules de
très hautes énergies (voir à ce sujet la réponse plus détaillée de la question 29.).
1 2 p2 3
mv =
= k BT p = 3mk BT d’où
2
2m 2
λ=
h
3mk BT
Micro
Une température T = 300 K conduit à λ = 0,15 nm .
techn
15. On a
iques
:211
0428
318:
8891
14. Aucun, car il est impossible de mettre en évidence, dans le domaine macroscopique,
le caractère ondulatoire de la matière !
• pour le grain de poussière, notablement moins massique que la balle de ping-pong
et bien plus lent : p = 1.10−13 kg.m.s −1 et λ = 6.10−21 m .
Le commentaire est inchangé par rapport à la balle de ping-Pong.
• quant à la longueur d’onde d’une voiture roulant à vive allure, elle est encore plus
petite que celle de la balle de ping-pong ! Avec m = 1 200 kg , v = 130 km.h −1 on
a p = 4,3.103 kg.m.s −1 et λ = 1,5.10 −38 m .
caniq
ue e
t des
Cette longueur d’onde est de l’ordre de la distance entre les atomes dans un réseau
cristallin ; un faisceau de neutrons thermiques tombant sur un cristal de NaCl ou
CaCl2 peut donc donner naissance à des phénomènes de diffraction analogues à
ceux observés avec des rayons X dont la longueur d’onde est du même ordre.
L’expérience a été conduite avec succès pour la première fois en 1947.
e Mé
,QWHUSUpWDWLRQSUREDELOLVWHHWLQpJDOLWpGH+HLVHQEHUJ 376, ure d
16. L’énoncé impose une position précisée à Δx = 10−7 m près.
périe
D’après l’inégalité de Heisenberg ΔxΔp x ≥ = / 2
Δp x = m Δv x ≥
=
2 Δx
et
e Na
Écol
tiona
le Su
finalement :
&KDSLWUH
h
= 5.10 −18 m.s −1
4π m Δx
Ce résultat signifie qu’il est alors impossible de connaître la vitesse à mieux que
5.10−18 m.s −1 près ! Dans la pratique ceci n’introduit aucune restriction
puisqu’aucun appareil n’est capable d’atteindre une telle précision sur la vitesse
(variation relative Δv x / v x = 5.10−12 si v x ≈ 1 ȝm.s −1 ). L’indétermination est si petite
que l’inégalité de Heisenberg n’a pas de conséquence à l’échelle macroscopique. La
vitesse et la position peuvent être connues simultanément avec la meilleure précision
(l’imprécision sur la mesure est largement supérieure à celle liée à l’inégalité
d’Heisenberg) et la mécanique classique est parfaitement adaptée.
55.1
59:1
6925
2973
7
Δv x ≥
2320
:196
.65.1
La longueur d’onde associée au grain de poussière est plus grande que celles
associées à la balle de ping-pong ou à la voiture, c’est donc pour le grain de
poussière que l’on a la plus grande indétermination sur les paramètres de la
trajectoire, et pourtant, cela n’a aucune conséquence à cette échelle. L’inégalité
d’Heisenberg (et de manière plus générale la mécanique quantique) concerne en
premier lieu le domaine microscopique.
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
ure d
e Mé
caniq
18. Ox est l’axe perpendiculaire à la direction
x
Oz , celui de la lumière incidente ; c’est selon
G
cet axe que la largeur de la fente est a (le
′
p
G
schéma ci-contre est une vue de dessus).
a
p
θ 0 Δp x
Un photon incident se propage suivant Oz
z
G
O
avec une quantité de mouvement p . Au
moment de franchir la fente de largeur a ,
l’indétermination sur sa position transversale
a
(suivant Ox ) est Δx = (on a l’information que le photon traverse la fente).
2
Le principe d’indétermination d’Heisenberg conduit alors à une indétermination
=
Δp x sur la quantité de mouvement latérale : Δx Δpx ≥ = / 2 Δpx ≥
a
5pSRQVHVDX[TXHVWLRQV
ue e
t des
Micro
techn
iques
:211
0428
318:
8891
17. On note Δr et Δp les indéterminations sur la position r et la quantité de
mouvement p de l’électron.
• La relation d’indétermination d’Heisenberg s’écrit ΔrΔp ≥ = / 2 ; en introduisant
les grandeurs relatives :
Δr Δp
=
Δr Δp 1
, et à l’aide de la règle de quantification,
≥
≥
(1)
r p 2 rp
r p 2n
• Pour traiter l’électron atomique au sens de la mécanique classique, il faudrait que
les indéterminations sur sa position et sa quantité de mouvement soient
négligeables devant r et p respectivement :
Δr Δp
Δr r et Δp p , ce qui entraînerait
1 (2)
r p
Les résultats (1) et (2) sont incompatibles ! (sauf si n 1 ). La relation
d’indétermination conduit donc à rejeter l’image semi-classique des orbites de Bohr.
Avec une petite composante Δp x (inexistante avant la fente) le photon ne sort alors
plus parallèlement à l’axe, mais dans une direction donnée par le vecteur quantité de
G
G
mouvement p′ , de même norme que p (l’énergie du photon est inchangée), et donc
h
p′ = p = .
6925
2973
7
λ
55.1
59:1
La lumière émerge dans un cône dont le demi-angle au sommet est donné par :
Δp
=/a
λ
sin θ 0 = x =
=
p′ h / λ 2π a
On retrouve donc le fait que l’angle de diffraction est d’autant plus important que la
longueur d’onde est grande et que la fente est fine.
:196
.65.1
Rq : Il faut ne pas s’inquiéter de la présence du facteur 2π , ceci n’est pas
significatif car la relation d’indétermination est à prendre en ordre de
grandeur.
2320
3DUWLFXOHGDQVXQSXLWVGHSRWHQWLHOLQILQL
318:
8891
19. L’énergie de l’état fondamental dans un puits infini a été déterminée à la question
10. :
h2
E1 =
8ma 2
Micro
techn
iques
:211
0428
L’application numérique fournit E1 = 2, 4.10−18 J ≈ 15 eV et concerne l’électron
dans un atome d’hydrogène lié au proton par une interaction électromagnétique
(même si le puits n’est pas infini). On retrouve ici une valeur voisine de l’énergie
d’ionisation de l’atome d’hydrogène soit 13,6 eV .
13, 6 eV
Un modèle plus réaliste conduit à des niveaux quantifiés d’énergie En = −
.
n2
Le puits infini, modèle simple, fournit déjà les bons ordres de grandeur pour
l’évolution de particules confinées.
20. Les niveaux d’énergie sont donnés à la question 10. par :
h2
8ma 2
ue e
t des
En = n 2 E1 avec E1 =
e Mé
caniq
L’application numérique fournit E1 = 1, 3.10−12 J ≈ 8, 2 MeV , ce qui est bien l’ordre
de grandeur de l’énergie de liaison par nucléon. Là aussi le puits de potentiel infini
doit être corrigé pour obtenir un bon accord avec les résultats expérimentaux.
périe
ure d
21. Puits de potentiel pour une particule macroscopique.
• La longueur d’onde du grain de poussière a été déterminée à la question 14. :
λ = 6.10−21 m , infime par rapport à la taille de la boîte a = 0,1 mm .
La condition d’obtention d’une onde stationnaire, a = n
λ
e Na
Écol
tiona
le Su
, conduit directement à
2
la valeur n = 3.1016 , mode de vibration colossalement grand (pour la corde
vibrante on se limite à n = 10 ).
&KDSLWUH
• Les niveaux d’énergie sont donnés à la question 10. par :
En = n 2 E1 avec E1 =
h2
8ma 2
59:1
6925
2973
7
L’application numérique fournit E1 = 5,5.10−50 J , soit En = 5,5.10 −50 n 2 (J) .
1
L’énergie cinétique du grain de poussière est Ec = mv 2 = 5.10−17 J
2
Dans un puits infini l’énergie s’identifie à l’énergie cinétique ; la condition
En = Ec conduit également à la valeur précédente de n = 3.1016 .
318:
8891
2320
:196
.65.1
55.1
• Le passage au niveau d’énergie immédiatement voisin demande une énergie :
ΔE = En +1 − En = (n + 1)2 E1 − n 2 E1 ≈ 2nE1 = 3, 3.10−33 J (pour n grand)
ΔE 2
≈ = 7.10 −17 .
soit en variation relative :
En n
Il apparaît donc que pour le grain de poussière (et plus encore pour un objet
macroscopique) la variation relative d’énergie d’un niveau à l’autre est infime, et
c’est ce qui donne l’illusion que l’énergie est à cette échelle une grandeur
« parfaitement » continue.
0428
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
techn
iques
:211
22. Le spectre émis par les atomes excités lors des transitions entre niveaux
électroniques quantifiés est un spectre de raies ; en TP d’optique sur le goniomètre,
les lampes spectrales (qui émettent essentiellement dans le visible et l’ultraviolet)
donnent sur fond noir un ensemble discret de raies de couleur différente. Alors que
la caractéristique d’une lampe blanche est d’émettre un spectre continu.
périe
ure d
e Mé
24. Les serpents de type crotales, mais aussi les boas ou pythons disposent de récepteurs
sensibles à l’infrarouge, rayonnement (par chaleur) émis par les animaux à sang
chaud. Ces serpents étant nocturnes, ils perçoivent par nuit noire le plus léger
changement de température et donc la présence de petits rongeurs (en sommeil à ce
moment-là !) qui deviennent ainsi des proies faciles.
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
25. Les couleurs sont dans l’ordre, le violet, le vert et le rouge. Il s’agit des longueurs
d’onde dans le vide.
5pSRQVHVDX[TXHVWLRQV
caniq
ue e
t des
Micro
23. Lors de la désexcitation, il y a émission d’une onde lumineuse dont l’énergie est
égale à l’écart entre les niveaux atomiques : ΔE = hc λ soit λ = 709 nm . La
radiation émise appartient au domaine du visible (rouge). Seuls les tubes néons
utilisés pour les enseignes lumineuses de coloration rouge contiennent du néon. Les
tubes fluorescents d’usage domestique et qui donnent une lumière blanche, eux,
contiennent de l’argon. Ce sont surtout des tubes au mercure, qui fournissent des
UV et qui nécessitent donc un revêtement fluorescent sur les parois du tube pour
obtenir de la lumière visible (comme d’ailleurs les lampes fluo-compactes).
6925
2973
7
Le symbole Na sur les lampes à vapeur de sodium vient du nom latin Natrium et le
symbole Hg sur les lampes à vapeur de mercure vient du nom grec latinisé
Hydrargyrum signifiant « argent liquide ».
La longueur d’onde de la raie rouge du laser He-Ne est λ = 632,8 nm .
2320
:196
.65.1
55.1
59:1
26. Intensité lumineuse et flux de photons
Dans le milieu absorbant, les photons qui sont absorbés par le milieu contribuent à
diminuer leur flux Φ (sans modifier leur énergie hν ), c’est-à-dire leur nombre par
unité de surface et par unité de temps, et donc l’intensité I = Φ hν diminue
(l’intensité est la puissance par unité de surface).
Dans le second cas, l’intensité (grandeur intensive) est inchangée, seule la puissance
du faisceau P = IS diminue proportionnellement à la surface, si on néglige la
diffraction. En termes de photons, le flux Φ et l’énergie hν sont inchangés, et donc
I = Φ hν également. Bien sûr on compte globalement moins de photons par unité
de temps puisque leur nombre dN = Φ Sdt pendant dt est réduit lorsque la surface
est réduite.
E
c
or l’énergie du photon est E = hν =
hc
, d’où
λ
p=
0428
* Pour m = 0 (un photon par exemple), on a p =
318:
8891
27. Relation d’Einstein : E 2 = p 2 c 2 + m 2 c 4
h
λ
techn
iques
:211
On retrouve la relation de Louis de Broglie ; en réalité de Broglie a simplement
généralisé cette relation à toute particule (y compris les particules de masse non
nulle). Sous la forme λ = h / p , elle conduit à associer une onde (dite onde de
matière) à toute particule matérielle.
ue e
t des
Micro
* Une particule matérielle au repos possède une quantité de mouvement nulle
( p = 0 ) ; alors l’énergie de repos (ou énergie de masse) est donnée par la célèbre
formule :
E = mc 2
Pour l’électron, E = 0,51 MeV ; pour le proton, E = 940 MeV .
périe
ure d
e Mé
caniq
28. Les expériences de Davisson et Germer (1926) confirment l’hypothèse de Louis de
Broglie et sa relation qui permet de traiter une particule comme une onde ; en
particulier l’énergie des électrons utilisés était telle qu’il leur correspondait une
longueur d’onde dans le domaine des rayons X, leur permettant d’être diffractés par
le réseau cristallin comme ces derniers dans l’expérience de von Laue. La longueur
d’onde des électrons déduite des expériences était bien celle prévue par la formule
de Louis de Broglie.
e Na
Écol
tiona
le Su
29. Les particules (électrons, protons,…) accélérées par des accélérateurs puissants à
des vitesses proches de celle de la lumière permettent d’engranger des énergies
colossales bien supérieures à leur énergie de masse. Ces particules ultra-relativistes
&KDSLWUH
59:1
6925
2973
7
ont alors une énergie E ≈ p / c (voir la question 3633.) et leur longueur d’onde
associée par la formule de Louis de Broglie λ = h / p ≈ hc / E est d’autant plus
petite que leur énergie est élevée. Or la taille de ce que l’on peut « sonder » dans la
matière est de l’ordre de la longueur d’onde ou plus. Les constituants les plus
infimes de la matière ne peuvent donc être étudiés que par des longueurs d’onde très
courtes, donc des particules de très hautes énergies.
Le gigantisme concerne les grands accélérateurs comme le LHC (Large Hadron
Collider au CERN à Genève), dont les anneaux de stockage ont une circonférence
de 26,7 km, les protons pouvant atteindre les 7 TeV ( 1 TeV = 1012 eV ).
:196
.65.1
55.1
30. L’application numérique 1 de la question 5. montre que la longueur d’onde associée
à un électron accéléré sous une différence de potentiel de 10 V est de l’ordre de
0, 4 nm . Les anneaux observés sont donc des anneaux de diffraction puisque cette
longueur d’onde (comme celle des rayons X) est du même ordre de grandeur que la
maille cristalline. En augmentant la tension U , on augmente l’énergie cinétique Ec
2320
des électrons et la longueur d’onde λ = h / p = λ / 2mEc diminue. L’angle de
8891
diffraction étant proportionnel à λ , il faut s’attendre à une diminution du rayon des
anneaux.
0428
318:
31. Les études de spectres de raies de lampes spectrales (les électrons sont confinés dans
les atomes).
iques
:211
([HUFLFHV
techn
32. Flux de photons dans un faisceau laser
a) L’énergie d’un photon est E = hc / λ = 3,14.10−19 J = 2,0 eV .
Micro
b) La puissance surfacique (ou densité de flux surfacique) est le rapport de la
puissance P à la section S = π d 2 / 4 du faisceau :
ϕ = P / S = 318 W.m −2
ure d
e Mé
Rq : Augmenter la puissance du laser, c’est augmenter le flux de photons, sans
toucher à l’énergie du photon (autrement dit, le faisceau devient plus
intense, mais sa couleur n’est pas modifiée).
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
33. La lumière ultraviolette en chimie
a) La lumière interagit avec les molécules photon par photon.
Un photon « utile » doit être capable de rompre une liaison, et donc posséder une
E
c
énergie E photon = h ν = h supérieure à l’énergie d’une seule liaison El = o :
NA
λ
5pSRQVHVDX[TXHVWLRQV
caniq
ue e
t des
c) La puissance P est le produit du nombre de photons N t qui traverse la section
du faisceau par l’énergie E d’un photon :
P = N t E N t = P / E = 3, 2.105 photons par seconde .
E photon > El
h
c
λ
>
Eo
NA
hcN A
Eo
λ<
soit
6925
2973
7
AN : λ < 3, 4.10 −7 m = 0, 34 μm , le photon doit donc être dans le domaine UV.
.65.1
55.1
59:1
b) On pourrait croire naïvement qu’un laser rouge (de mise en œuvre bien plus
simple) peut faire l’affaire à condition d’être assez puissant.
Il n’en est rien : quel que soit leur nombre, les « photons rouges » ne peuvent pas
casser les liaisons chimiques des protéines (essentiellement du collagène) qui
constituent la cornée ; s’ils sont bien absorbés par la matière, c’est pour en
augmenter la température, ce qui conduit à des combustions dans le dioxygène de
l’air. La cornée se détruirait alors pour devenir noire et collante, ce qui n’est
guère adapté au problème…
8891
2320
:196
Les « photons UV » eux, cassent la plupart des liaisons et transforment les
molécules organiques en petits morceaux passant en phase gazeuse (à condition
d’être assez nombreux, d’où l’intérêt de travailler avec des fortes puissances
pendant des temps courts, c’est-à-dire en impulsions).
On obtient alors une surface propre et nette à l’échelle de la longueur d’onde,
pouvant jouer son rôle de réfraction de la lumière avec la courbure optimale
calculée par l’ophtalmologiste qui programme le laser.
iques
:211
0428
318:
c) La lumière UV, même avec des puissances modestes (peu de photons par unité de
temps), casse les liaisons chimiques pour former des intermédiaires réactionnels
appelés radicaux, le plus souvent en phase gazeuse.
Elle joue un rôle d’initiateur dans les réactions chimiques, qui peuvent se
propager à partir de ces radicaux, dans des mécanismes réactionnels en chaîne.
On peut ainsi qualifier les photons UV de « ciseaux chimiques » dans de
nombreuses réactions.
ue e
t des
Micro
techn
Rq : Pour rendre l’initiation plus facile, on peut utiliser des peroxydes (molécules
possédant une liaison simple O–O comme l’eau oxygénée). L’énergie de
cette liaison fragile étant bien plus faible (environ 145 kJ/mol) la lumière
visible est alors efficace.
caniq
34. La série de Balmer de l’hydrogène
1 ·
hc
1
1 ·
§ 1
§ 1
= RH ¨ 2 − 2 ¸
a) On écrit Em − En = E0 ¨ 2 − 2 ¸ =
, ou encore
λm→n
© n m ¹ λm→n
©n m ¹
7
−1
où R H = E0 / hc = 1, 097.10 m est la constante de Rydberg.
e Mé
Les niveaux d’énergies étant quantifiés (valeurs entières de m et n ), les
radiations émises le sont aussi et on observe un spectre de raies.
e Na
Écol
tiona
le Su
périe
ure d
b) Si n = 2 , les radiations émises sont comprises entre ( m = 3 ; λ = 656 nm ) dans
le visible et ( m = ∞ ; λ = 365 nm ) dans le proche UV.
&KDSLWUH
6925
2973
7
35. Effet photoélectrique
a) Non, les énergies cinétiques ne sont pas changées car augmenter la puissance de
la lampe revient à émettre davantage de photons par unité de temps comme cela a
été vu à la question 32., mais cela ne modifie en rien l’énergie de chaque photon
qui ne dépend que de sa longueur d’onde. (En revanche, le nombre d’électrons
émis par unité de temps, dit courant d’émission, est proportionnel au flux incident
de photons).
55.1
59:1
b) L’énergie hν = hc / λ de chaque photon sert, lorsqu’elle est suffisante, au travail
d’extraction WS d’un électron du potassium, l’excédent étant emporté sous forme
d’énergie cinétique par cet électron :
hc
= WS + Ec
λ
.65.1
Le tracé de la courbe Ec (1 / λ ) conduit à une droite dont la pente est identifiable
:196
au produit hc ; la connaissance de c = 3.108 m.s −1 conduit à la valeur de la
2320
constante de Planck : h ≈ 6, 6.10−34 J.s .
8891
c) Les énergies associées aux raies verte ou jaunes ne sont pas suffisantes pour
vaincre le travail d’extraction et aucun électron n’est alors émis.
WS est l’ordonnée à l’origine de la droite précédente : on obtient
318:
WS = 2,3 eV (les tables donnent WS = 2, 29 eV )
0428
d) La longueur d’onde maximale λ S est obtenue pour Ec = 0 soit :
hc
≈ 540 nm
WS
On comprend pourquoi la raie verte et les raies jaunes du mercure ne conviennent
pas.
techn
iques
:211
λS =
h
= 0, 2 nm .
p
Il s’agit de l’ordre de grandeur de la taille des atomes ou des distances
interatomiques dans un cristal. Ces électrons « lents » sont donc très bien
diffractés par la matière et permettent d’étudier par exemple les états de surface
d’un métal.
ure d
e Mé
caniq
d’où la longueur d’onde : λ =
périe
b) Ici E mc 2 , l’électron est ultra-relativiste (et puisque E = Ec + mc 2 , on en
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
déduit Ec ≈ E ).
La quantité de mouvement p est donnée par la formule d’Einstein :
5pSRQVHVDX[TXHVWLRQV
ue e
t des
Micro
36. Longueurs d’onde associées à des électrons
Pour m = 0, 9.10−30 kg et c = 3.108 m.s −1 , on a mc 2 = 8,1.10−14 J = 0,51 MeV .
a) Dans ce cas Ec mc 2 et l’électron est classique ; la mécanique classique donne
G
G
1
p = mv et Ec = mv 2 , soit en éliminant la vitesse :
2
p = 2mEc = 3, 4.10−24 kg.m.s −1
E 2 − m 2c 4 E
puisque E mc 2
≈
c
c
(ce qui redonne l’expression utilisée pour le photon, autre particule relativiste,
mais de masse nulle et de vitesse c ).
h
Alors p = 5, 3.10−19 kg.m.s −1 soit λ = = 1, 2.10 −15 m .
p
Avec ces électrons de haute énergie il devient possible d’explorer la structure des
noyaux atomiques dont les dimensions sont de l’ordre de cette longueur d’onde
( 10 −15 m est appelé un « fermi »).
55.1
59:1
6925
2973
7
E 2 = p 2c 2 + m 2c 4 p =
8891
2320
:196
.65.1
37. Exemples de puits de potentiel infini
a) Un électron dans un atome
Les niveaux d’énergie d’une particule de masse m confinée dans un puits infini
π 2= 2
h2
2
d’extension a sont donnés par En = n 2
=
. Pour un électron de
n
2ma 2
8ma 2
masse m = 0, 91.10−30 kg confiné dans un puits infini de largeur a = 0, 2 nm , les
trois premiers niveaux sont :
318:
E1 = 9, 3 eV , E2 = 37 eV et E3 = 84 eV .
iques
:211
0428
La longueur d’onde λ p →n du rayonnement émis lors d’une transition p → n
s’écrit :
hc
hc
E p − En = h ν p → n =
λ p →n =
E p − En
λ p→n
techn
AN : λ 3→1 17 nm et λ 2→1 44 nm ; ces deux longueurs d’onde sont situées
dans le domaine de l’ultraviolet.
Micro
b) Un proton dans un noyau
Pour un proton de masse m = 1, 67.10−27 kg confiné dans un puits infini de
ue e
t des
largeur a = 5 fm = 5.10−15 m , les trois premiers niveaux d’énergie sont :
E1 = 8,1 MeV , E2 = 33 MeV et E3 = 73 MeV .
caniq
AN : λ 3→1 19 fm et λ 2→1 51 fm ; ces deux longueurs d’onde sont situées
e Mé
dans le domaine des rayons γ .
e Na
Écol
tiona
le Su
périe
ure d
c) Un électron dans une structure solide
Lors de la transition p → n d’une particule confinée dans un puits de potentiel
infini :
hc
8mca 2
1
λ p→n =
=
× 2
E p − En
h
p − n2
&KDSLWUH
Dans le cas d’une transition 2 → 1 , cette relation s’écrit encore λ 2→1 =
8mca 2
.
3h
1 3 h λ 2→1
, et numériquement a = 0,80 nm .
2 2mc
Cette valeur est bien de l’ordre de grandeur du paramètre de maille d’une
structure cristalline.
6925
2973
7
On en déduit l’expression a =
55.1
59:1
4XHVWLRQVRXYHUWHV
318:
8891
2320
:196
.65.1
38. Quantification du moment cinétique orbital de l’électron atomique
La longueur d’onde de de Broglie associée à l’électron est :
h
h
λ= =
p mv
alors que le périmètre de la trajectoire circulaire de rayon r est 2π r .
La quantification du moment cinétique s’écrit alors :
mv
=
h
σ n = mrv = 2π r
≡ n= soit 2π r
= 2π r ≡ n=
2π
2πλ
λ
d’où l’on déduit la relation simple :
0428
2π r = nλ
périe
ure d
39. Relation d’indétermination et incertitude (PTSI)
Le temps de pose permet une image ponctuelle au sens du capteur (voir question 57.
du chapitre 2.). L’incertitude sur la position d’un point image du coureur est d’au
moins un demi-pixel sur le capteur :
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
U ( x ) = a / (2 | γ |)
5pSRQVHVDX[TXHVWLRQV
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
Il apparaît que le périmètre de la trajectoire est un
multiple entier de la longueur d’onde de de
Broglie associée à l’électron.
La figure ci-contre est faite pour n = 7 . Elle
évoque le mode n = 7 des ondes stationnaires sur
une corde fixée aux deux extrémités ; au lieu de
considérer la corde rectiligne il suffit de la replier pour joindre les deux extrémités
fixes, et alors la longueur de la corde apparaît ici comme un multiple entier de la
longueur d’onde (et non de la demi-longueur d’onde). La condition de quantification
sur le moment cinétique n’est rien d’autre qu’une condition d’interférences
constructives sur la circonférence des ondes de matière, comme un aller-retour sur
une corde vibrante.
La quantification du moment cinétique a permis à Bohr d’expliquer la quantification
de l’énergie des atomes (établie à l’exercice 49. du chapitre 8.).
2
§
· §τ ·
U (V )
a
§ U ( Δz ) · § U ( Δt ) ·
= ¨
¸ +¨
¸ = ¨
¸ +¨ ¸
V
© Δz ¹ © Δt ¹
© | γ | V Δt ¹ © Δt ¹
2
§ a · §V τ ·
τ
+¨
Soit : U (V ) = ¨
¸ = 2V
¸
Δt
© | γ | Δt ¹ © Δt ¹
59:1
2
55.1
car | γ | V τ = a
U ( mV ) = 2 m V
2
τ
.65.1
2
2
6925
2973
7
Entre deux photos il s’écoule Δt = 0, 2 s , le déplacement sur le capteur est
Δz = | γ | V Δt . L’incertitude sur Δz est d’au moins un pixel (distance entre deux
points du capteur) : U ( Δz ) = a . L’incertitude sur Δt est d’au moins τ (différence
entre deux dates à τ / 2 près).
Soit en ne considérant que l’incertitude de protocole :
Δt
:196
AN : U ( x) = 3, 6 mm ; U (V ) = 2, 5.10 − 2 m.s −1 ; U (m V ) = 2, 0 kg.m.s −1 :
2320
U ( x ) U (mV ) ≈ 7.10−3 J.s
318:
8891
On est très loin de = , pour un objet macroscopique les incertitudes de mesure
empêchent toute manifestation de la relation d’indétermination de Heisenberg.
:211
0428
40. Énergie des électrons d’un microscope électronique (*) (PTSI)
Indications : Écrire l’expression de l’énergie cinétique, passer à la valeur moyenne
et traduire l’inégalité d’Heisenberg.
e Mé
caniq
ue e
t des
Micro
techn
iques
L’énergie cinétique des électrons est reliée à leur quantité de mouvement par la
p2
relation classique : Ec =
2m
En passant aux valeurs moyennes et à l’aide de la relation fournie :
2
2
2
p2
Δ p) + p
Δ p)
(
(
2
Ec =
=
≥
car p ≥ 0
2m
2m
2m
L’indétermination Δ p sur la quantité de mouvement dans la direction x est reliée à
=
=
celle Δ x sur la position par l’inégalité d’Heisenberg : Δ x.Δ p ≥ soit Δ p ≥
2
2Δ x
Les deux relations conduisent à :
2
h2
Δ p)
=2
(
E
≥
soit
Ec ≥
≥
c
2
2
2m
32π 2m ( Δ x )
8m ( Δ x )
ure d
AN : Avec h = 6, 63.10−34 J.s , m = 0, 91.10−30 kg et Δ x = 0,11 nm donné par
e Na
Écol
tiona
le Su
périe
l’énoncé, il vient Ec ≥ 1, 26.10−19 J = 0,8 eV
&KDSLWUH
41. Délocalisation d’électrons dans une molécule organique (*)
Indications : Il faut commencer par deux choses, estimer la largeur a du puits de
potentiel et repérer les niveaux de la transition la plus basse à
envisager.
6925
2973
7
* les électrons π sont délocalisés sur l’ensemble de la molécule, sans pouvoir en
sortir ; ceci constitue pour eux un puits infini dont la largeur peut être estimée à :
a ≈ 2 × 134 + 154 = 422 pm ≈ 0, 42 nm
.65.1
55.1
59:1
* sur les deux doubles liaisons il y a 4 électrons π délocalisés (2 par liaison) ; pour
le remplissage des niveaux d’énergie dans le puits, on peut mettre deux électrons (de
spin opposé) sur le niveau 1 et les deux autres sur le niveau 2 ; ces niveaux d’énergie
étant occupés, la première transition possible concerne alors le passage du niveau
n = 2 au niveau n = 3 .
318:
8891
2320
:196
Les niveaux d’énergie d’une particule de masse m confinée dans un puits infini
π 2= 2
h2
2
d’extension a sont donnés par En = n 2
=
.
n
2ma 2
8ma 2
La longueur d’onde λ n→ p du rayonnement absorbé lors d’une transition n → p
s’écrit :
hc
8ma 2 c
hc
=
λ n→ p =
E p − En = hν n → p =
E p − En h ( p 2 − n 2 )
λ n→ p
0428
Avec n = 2 et p = 3 :
8ma 2 c
8 × 0,91.10−30 × (0, 42.10−9 ) 2 × 3.108
=
soit λ = 116 nm
h( p 2 − n 2 )
6,62.10−34 × (9 − 4)
Cette longueur d’onde se situe dans l’ultraviolet ( λ < 400 nm ).
5pSRQVHVDX[TXHVWLRQV
e Na
Écol
$SSURFKHTXDQWLTXH
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
λ=
ue e
t des
caniq
e Mé
ure d
périe
le Su
tiona
e Na
Écol
318:
0428
:211
iques
techn
Micro
:196
2320
8891
.65.1
55.1
59:1
6925
2973
7
59:1
6925
2973
7
&KDSLWUH
5pJLPHVFRQWLQXHW
WUDQVLWRLUH
.65.1
&RPSRVDQWXVXHOVHQ73
résistance
inductance d’une bobine
capacité d’un condensateur
2320
:196
R ≈ 1 à 10 kΩ
L ≈ 10 mH
C ≈ 1 nF à 1 μF
8891
&RQVWDQWHVGHWHPSVGHVGLS{OHVFODVVLTXHV
constante de temps du dipôle RC
τ = RC
constante de temps du dipôle RL
τ = L/R
fréquence d’oscillation d’un dipôle LC
f0 = 1/2π LC
:211
0428
318:
R = 1 kΩ, C = 0,1 μF
τ = 0,1 ms
R = 1 kΩ, L = 10 mH
τ = 10 ȝs
L ≈ 10 mH, C ≈ 0,1 μF
f0 ≈ 5 kHz
iques
/HGLS{OH5/&HQ73
techn
L ≈ 10 mH, C ≈ 0,1 μF
f0 = 1/2π LC ≈ 5 kHz
fréquence propre d’un RLC
Micro
facteur de qualité (R ≈ 50 Ω du générateur)
RLC série
ue e
t des
Q = L Ȧ0 / R ≈ 5
bande passante résonance d’intensité
ǻf =
f0
≈ 1kHz
Q
caniq
'LRGH
diode idéale : tension de seuil ;
« résistances » : diode bloquée /
conductrice
diode réelle : tension de seuil ;
« résistances » : diode bloquée /
conductrice
ure d
e Mé
Vs = 0 ;
bloquée R = ∞ ; passante Rdynamique. = 0
périe
Écol
e Na
tiona
le Su
&DUDFWpULVWLTXHVG·DSSDUHLOV
résistance de sortie d’un générateur BF
fréq. max. d’utilisation d’un GBF en TP
5pJLPHVFRQWLQXHWWUDQVLWRLUH
55.1
/HVRUGUHVGHJUDQGHXUXWLOHV
Vs ≈ 0,6 V ;
bloquée R ≈ 109 Ω ;
passante Rdyn. ≈ 100 Ω
Rs ≈ 50 Ω
f ≈ 100 kHz à 1 MHz
Ce ≈ 30 pF // Re ≈ 1 MΩ
Re ≈ 10 MΩ
quelques dizaines de kHz maximum
AC ( f < 1 kHz ) : 2% + 3
DC : 0, 09% + 2
AC : ( f < 1 kHz ), 1,5% + 3
DC : 0,5% + 3
( < 600 Ω ) : 0,5% + 2
( > 600 Ω ) : 0,5% + 1
entrée d’un oscilloscope
entrée d’un voltmètre numérique
Bande passante d’un multimètre
6925
2973
7
Voltmètre numérique
Milliampèremètre numérique
59:1
Ohmmètre numérique
55.1
(')
tension efficace et fréquence du secteur
prix du kWh (hors abonnement)
:196
.65.1
230 V ; 50 Hz
environ 10 centimes d’euro TTC
8891
2320
/HFRXUVG·DERUG
Se référer d’abord à la partie dérivée et différentielle du chapitre 0.
0428
318:
/HVORLVHWOHVFRQYHQWLRQVGHO·pOHFWURFLQpWLTXH
iques
:211
1. Qu’appelle-t-on charge électrique ? Que signifient les propriétés de conservation et
de quantification de la charge électrique ? Qu’est-ce qu’un porteur de charge ?
Qu’est-ce qu’un milieu conducteur électrique ?
Micro
techn
2. Rappeler la définition d’un courant électrique. À quoi sert l’orientation d’un
conducteur électrique ? Quelle est la différence entre courant électrique et intensité
du courant électrique ? Qu’est-ce qu’un courant continu (ou stationnaire) ?
3. Expliquer ce que signifie « approximation des régimes quasi stationnaires » ?
ue e
t des
4. Rappeler la loi des nœuds. S’applique-t-elle en régime variable ?
e Mé
caniq
5. Quels sont les choix d’orientation appelés « convention récepteur » et « convention
générateur » pour un dipôle quelconque ? Donner explicitement, pour chaque
orientation, la relation entre tension et intensité d’abord pour un conducteur
ohmique puis pour une source de tension réelle (voir dans la partie TP le
comportement de ces dipôles).
périe
ure d
6. Établir la puissance électrocinétique reçue par un dipôle quelconque. Qu’appelle-ton fonctionnement récepteur et fonctionnement générateur d’un dipôle ? Quel est le
rapport avec les termes « actif » et « passif » qualifiant la nature d’un dipôle ?
e Na
Écol
tiona
le Su
7. Qu’appelle-t-on l’effet Joule ?
&KDSLWUH
8. Établir les lois d’association série et parallèle de deux résistances R1 et R2 . Que
peut-on dire dans chaque cas de la puissance totale PT dissipée, en fonction de la
6925
2973
7
puissance P1 et P2 dissipée dans chacune d’entre elles ?
9. Rappeler par un schéma et son résultat le principe d’un diviseur de tension ; puis
d’un diviseur d’intensité. Préciser clairement les conditions de validité de ces lois.
55.1
59:1
10. Dans la représentation symbolique d’un réseau (ou circuit électrique), qu’appelle-ton nœud, branche et maille ? Donner un exemple pour chaque terme. Dans cette
représentation, les liaisons entre les dipôles sont des fils de résistance nulle ; cela
signifie-t-il que l’on néglige la résistance des fils du montage réel ?
.65.1
11. Que traduit la loi des mailles ? En donner une expression générale, avec schéma.
2320
:196
12. Sous quel nom regroupe-t-on loi des mailles et loi des nœuds ? Quelle est l’importance de ces lois en électrocinétique ?
8891
'LS{OHVHWDVVRFLDWLRQ
0428
318:
13. Commenter l’expression de la résistance d’un conducteur cylindrique (conduction
axiale) de section S et de longueur l : R = l / σ S .
:211
14. Définir de façon théorique ce que serait une source de tension idéale. À quelle
condition une source réelle de tension se comporte-t-elle comme une source idéale ?
techn
iques
15. Définir de façon théorique ce que serait une source de courant idéale. À quelle
condition une source réelle de courant se comporte-t-elle comme une source idéale ?
Micro
16. L’association de dipôles passifs, par exemple de type conducteurs ohmiques,
conduit-elle à un circuit ou à un nouveau dipôle ? Citer des associations simples.
ue e
t des
17. L’association de dipôles actifs, par exemple de type sources de tension, peut
s’interpréter comme un nouveau dipôle dit équivalent. Traiter de l’association série
de deux sources de tension.
e Mé
caniq
18. L’association d’un dipôle actif et d’un dipôle passif conduit à un circuit. Que signifie
résoudre ce réseau ? Définir le point de fonctionnement et le déterminer dans le cas
de l’association d’une source de tension et d’un conducteur ohmique.
périe
ure d
19. Rappeler, en indiquant bien le sens de l’intensité et la flèche de tension, la relation
entre tension et intensité aux bornes d’un condensateur parfait de capacité C , puis
d’une bobine parfaite d’inductance L . Donner, en les justifiant, les modélisations
d’un condensateur réel et d’une bobine réelle.
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
20. Dans une branche contenant un condensateur parfait, quelles sont les deux relations
possibles entre intensité du courant électrique et charge du condensateur suivant les
choix de l’orientation du conducteur et de la variable charge du condensateur ?
6925
2973
7
21. À partir de la puissance reçue, déterminer l’énergie emmagasinée dans une bobine
d’inductance L et traversée par un courant d’intensité i . Quelle est l’énergie
emmagasinée dans un condensateur de capacité C aux bornes duquel la tension est
u ? Connaître ces résultats et savoir faire les démonstrations.
59:1
22. Quelle est la grandeur électrique continue dans une branche comportant une bobine,
et pourquoi ? Quelle est la grandeur électrique continue dans une branche contenant
un condensateur, et pourquoi ?
55.1
23. Une source de tension (de fém notée E ) de résistance interne Rg est branchée sur
.65.1
une résistance d’utilisation Ru ; à quelle condition sur Ru la puissance reçue par Ru
est-elle maximale ?
:196
Pour les questions suivantes se référer à la partie Équations différentielles du chapitre 0.
2320
/HGLS{OH5&HWOHGLS{OH5/
318:
8891
24. Définir une évolution en régime libre. Établir les équations différentielles
d’évolution en régime libre des variables i et u C pour le dipôle RC , puis des
0428
variables i et u L pour le dipôle RL . Sous quelle forme pourrait-on écrire une
équation valable pour tous les cas ?
Micro
techn
iques
:211
25. Un dipôle RC série est fermé à t = 0 sur une source idéale de tension continue E ;
u (0 − ) = 0 , déterminer la tension u (t ) aux bornes du condensateur et tracer son
graphe. Donner l’expression de la durée caractéristique τ d’évolution de ce dipôle
et la placer sur le graphe. Interpréter qualitativement la forme de la courbe. Indiquer
approximativement où finit le régime transitoire et où commence le régime forcé
continu.
Montrer que l’on peut obtenir les valeurs des diverses grandeurs en régime forcé
continu sans calculs (c’est-à-dire sans passer par l’équation différentielle).
ue e
t des
/HGLS{OH/&HQUpJLPHOLEUH
e Mé
caniq
26. Écrire l’équation différentielle d’un dipôle LC en régime libre et en déduire la
pulsation propre d’oscillation ω0 de ce système. Que peut-on dire de cette
modélisation ?
q ω 0
ure d
27. On donne ci-contre le graphe, appelé trajectoire de phase,
q
en fonction de q , pour des conditions initiales
de
ω0
q
q0
e Na
Écol
tiona
le Su
périe
données. Justifier l’allure circulaire de la courbe. Pourquoi
la trajectoire est-elle fermée ? Qu’obtiendrait-on pour un
graphe q ( q) ? Indiquer le sens de parcours de la trajectoire
de phase.
&KDSLWUH
28. Montrer que l’énergie de ce système est constante au cours du temps et expliquer
qualitativement les oscillations.
6925
2973
7
/HGLS{OH5/&
Ces questions peuvent être complétées par l’étude de l’oscillateur mécanique en régime
libre vu aux questions 1. à 4. du chapitre 8..
2320
:196
.65.1
55.1
59:1
29. Pour un dipôle RLC série, en régime libre, on observe, en fonction de la valeur de
R , les trajectoires de phase ci-dessous, de type x ( x ) avec x variable réduite
q
et sur une même durée. On a respectivement : R1 R 2 < R3 < R 4 . Les
x=
q0
valeurs de L et C sont constantes. Décrire l’évolution de q (t ) suivant les valeurs de
R.
8891
R1
R4
0428
318:
R3
iques
:211
R2
ue e
t des
Micro
techn
30. Dans le cas d’un dipôle RLC série en régime libre, pourquoi tous les régimes sontils amortis (proposer deux justifications) ? Comment est définie la résistance critique
Rc ? Quel type de régime obtient-on (raisonner physiquement) pour R > Rc ? pour
R < Rc ? Quel est des trois régimes, celui dont le retour à l’équilibre est le plus
rapide ? Quelle est la seule manière d’obtenir un régime sinusoïdal non amorti ?
ure d
e Mé
caniq
31. Normaliser l’écriture de l’équation différentielle régissant l’évolution en régime
L ω0
1
et Q =
appelé facteur de qualité.
libre du RLC série, en posant ω 02 =
R
LC
Décrire les divers régimes d’amortissement en fonction de Q . Faire le lien avec la
question 29..
le Su
périe
32. Toujours pour le dipôle RLC série en régime libre, donner la forme de la fonction
u C (t ) , tension aux bornes de C dans le cas du régime pseudopériodique. Définir les
courbes enveloppes ; les extrema de u C (t ) sont-ils sur ces courbes enveloppes ?
Donner l’allure du graphe de u C (t ) , en précisant les zéros de u C (t ) , les points de
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
contact avec les courbes enveloppes et les extrema de u C (t ) . Définir le décrément
logarithmique δ et comparer la pseudo-période T à la période propre T0 ; quelle
relation lie ces trois grandeurs ?
6925
2973
7
33. Quel est le lien entre durée du régime libre et facteur de qualité ?
59:1
34. Un dipôle RLC série est fermé à t = 0 sur une source idéale de tension continue E ;
de quelle nature est le régime forcé dans ce cas ? Donner sans passer par l’équation
différentielle les valeurs de i , u L et u C en régime forcé.
.65.1
55.1
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
8891
2320
:196
En régime continu, des deux orientations conventionnelles possible de
l’intensité, il est préférable de choisir celle qui correspond au sens réel du
courant s’il est prévisible (par exemple : à l’extérieur d’une source continue
fonctionnant en générateur, le courant va du + vers le –) afin que i > 0 .
iques
:211
0428
318:
Les lois de l’électrocinétique sont simples, mais les grandeurs y sont
algébriques. L’application de la loi des mailles et des nœuds par exemple ne
supporte pas de négligence sur les signes. On peut s’aider de flèches de tension
aux bornes de chaque dipôle d’une maille avant d’écrire la loi des mailles. Par
ailleurs, dans un circuit à plusieurs branches, il peut se faire qu’une résistance
se retrouve en « convention générateur » ou un générateur en « convention
récepteur »…, donc attention aux signes, une erreur étant toujours très mal vue.
Micro
techn
Ne pas confondre le courant électrique et la variable qui sert à le décrire :
l’intensité du courant électrique. Notamment le sens du courant est lié au
déplacement réel des porteurs de charge, qui ne dépend en aucun cas du choix
d’orientation du conducteur, alors que le signe de l’intensité est évidemment lié
au choix d’orientation.
e Mé
caniq
ue e
t des
Dans le cours d’électrocinétique en Physique, le qualificatif « continu »
correspond à des sources de tension dont la fém est indépendante du temps.
Pour un réseau linéaire, l’équation différentielle a donc un second membre
constant (au cours du temps) et le régime forcé est continu.
Attention ce même terme « continu » est utilisé en électrotechnique pour des
courants dont l’intensité ne change pas de signe, ce qui est beaucoup moins
restrictif.
e Na
Écol
tiona
le Su
périe
ure d
Lors du choix des variables intensité de chaque branche d’un réseau électrique,
il faut tenir compte tout de suite de la loi des nœuds pour limiter le nombre de
variables. Les équations de maille fournissent le nombre d’équations nécessaire
à la résolution (c’est-à-dire égal au nombre de variables puisque le problème a
une solution unique). Avec les équations de branche, les relations i(u ) aux
bornes de chaque branche ( i = u / R , i = Cdu / dt ,…), on peut se ramener à un
&KDSLWUH
système dont les inconnues sont les tensions (en général préférable) ou les
intensités ou un panachage des deux (voir la question 38.).
6925
2973
7
Ne pas commencer à transformer les équations issues des lois générales, sans
s’être assuré que le nombre d’équations est égal au nombre d’inconnues, et que
ces équations sont indépendantes.
.65.1
55.1
59:1
Ne pas confondre réseau et dipôle. Un dipôle ou un réseau dipolaire possède,
comme son nom l’indique, deux bornes et ne correspond pas à un réseau ou
circuit électrique. Les réseaux sont des associations de dipôles telles que plus
aucune borne libre n’apparaisse. Une caractéristique de dipôle, comme par
exemple la résistance, ne s’applique pas à un réseau, parler de résistance d’un
circuit par exemple n’a aucun sens.
318:
8891
2320
:196
Résoudre un réseau en continu (on se place en régime forcé continu), c’est
exprimer par exemple l’intensité du courant dans chaque branche en fonction
uniquement des résistances et fém des sources de tension (donnés dans
l’énoncé ou sur le schéma). On peut aussi exprimer de la même façon les
tensions aux bornes de chaque dipôle.
Souvent l’énoncé ne demande qu’une seule de ces grandeurs, on n’utilise pas
alors la résolution générale, mais on adapte la méthode à la grandeur cherchée,
notamment avec les diviseurs de tension et d’intensité (voir la question 37.).
techn
iques
:211
0428
En électrocinétique le terme régime est beaucoup utilisé et dans des sens
différents. Bien distinguer : le régime libre ; le régime transitoire et le régime
forcé ; les régimes forcés particuliers (continu, sinusoïdal). Voir les I.3 et II.3
dans la partie Équations différentielles du chapitre 0.
Dans le régime libre on distingue aussi divers régimes d’amortissement :
régime pseudopériodique, régime apériodique, régime apériodique critique
(voir la question 31.).
ue e
t des
Micro
On peut utiliser les caractéristiques statiques des dipôles, notamment pour
trouver un point de fonctionnement, en régime lentement variable et dans le
cadre de l’ARQS.
caniq
Les constantes d’intégration d’une équation différentielle se trouvent souvent
par continuité de la charge (ou tension) aux bornes d’un condensateur ou de
l’intensité du courant à travers une bobine. Elles s’appliquent à la solution
générale de l’équation et jamais à une partie de la solution.
ure d
e Mé
Les conditions initiales n’ont aucune influence sur un régime forcé, voir les I.3
et II.3 dans la partie Équations différentielles du chapitre 0. Dans une solution
en régime forcé, il n’y a aucune constante d’intégration.
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
Une équation contenant la dérivée d’une grandeur cherchée ne permet pas
d’obtenir cette grandeur par une simple intégration irréfléchie ! Il faut chercher
d’abord s’il s’agit bien d’une équation différentielle, ensuite reconnaître son
type avant de la résoudre avec la méthode adaptée.
:196
.65.1
55.1
59:1
6925
2973
7
Les formules d’association série ou parallèle et les diviseurs de tension et
d’intensité,
s’appliquentsérie
qu’en
aux réseaux
linéaires,
Les
formulesned’association
ou régime
parallèlecontinu
et les diviseurs
de tension
et
comportant
des conducteurs
ohmiques
des sources
effet ils
d’intensité, donc
ne s’appliquent
qu’en
régimeet continu
auxlinéaires.
réseauxEnlinéaires,
nécessitent
de branches
i (u ) linéaires
au sens
de la proportioncomportant des
doncrelations
des conducteurs
ohmiques
et des sources
linéaires.
En effet ils
nécessitent
des
relations
de
branches
(
)
i
u
linéaires
au
sens
de
la
proportionnalité : i = k u . Ils ne sont donc pas valables en régime variable (transitoire ou
k u . Ilsen
neprésence
sont doncdepas
valables
en condensateurs.
régime variable (transitoire ou
nalité
: i =continu)
forcé non
bobines
ou de
forcé non continu) en présence de bobines ou de condensateurs.
La linéarité des dipôles de type C ou L , en régime variable, est une linéarité
au sens
différentiel
entredei type
et u C
à leurs
Elle ne
permet est
pasune
l’utilisation
La
linéarité
des dipôles
ou Lbornes.
, en régime
variable,
linéarité
des
théorèmes
du continu
dansbornes.
le point
précédent.
revanche
elle
au sens
différentiel
entre i rappelés
et u à leurs
Elle
ne permetEnpas
l’utilisation
permet
d’aboutir,
des rappelés
réseaux dans
de celetype
(dits
linéaires),
une équation
des
théorèmes
du pour
continu
point
précédent.
Enà revanche
elle
différentielle
linéaire.
permet
d’aboutir,
pour des réseaux de ce type (dits linéaires), à une équation
différentielle linéaire.
R4
R3 R R5
4
R3
R5
iques
:211
0428
318:
35. Dans le dipôle AB ci-contre, indiquer si
A
parmi lelesdipôle
couplesABsuivants,
les indiquer
résistances
35. Dans
ci-contre,
si
R1
sont
ou suivants,
en parallèle,
et dans A
parmi en
les série
couples
les résistances
R1 R 2
l’affirmative,
donner
la
résistance
sont en série ou
en parallèle,
et dans
R2
l’affirmative,: R1 donner
équivalente
et R2 ; R1 laet R4résistance
; R2 et
B
équivalente
: R;1 Ret etR2R ; ; RR1 etet R
R3 ; R3 et R
R45 ?; R2 et B
4
3
5
4
R3 ; quel
R3 etgroupement
R4 ; R3 et Rdipolaire
R5 est-elle
?
en série ?
Avec
5 ; R4 et R
8891
/HVORLVGHO·pOHFWURFLQpWLTXHHQUpJLPHFRQWLQX
/HVORLVGHO·pOHFWURFLQpWLTXHHQUpJLPHFRQWLQX
2320
$SSOLFDWLRQVGLUHFWHVGXFRXUV
$SSOLFDWLRQVGLUHFWHVGXFRXUV
1
e Mé
caniq
ue e
t des
Micro
techn
est-elle en série
Avec
quelce
groupement
dipolaire
Exploiter
résultat pour
donnerR1l’expression
de la? résistance équivalente RAB du
Exploiter ce résultat pour donner l’expression de la résistance équivalente RAB du
dipôle.
dipôle.
36. Pour le réseau ci-dessous donner les valeurs des tensions u k en fonction de e sans
36. Pour
réseauéquation,
ci-dessous
donner
les valeurs
des tensions u k en fonction de e sans
poser le
aucune
ni faire
de calculs
écrits.
u 3 écrits.
poser aucune équation, ni faire de calculs
A
u3
A
2R
R
e
2R
R
e
u2
4R
R
u5
2R
u
R
u5
2
2R
R 4R
u
1
ure d
périe
le Su
u4
u4
tiona
B
B
R
R
e Na
R
Écol
u1
&KDSLWUH
&KDSLWUH
37. Pour chaque circuit ci-dessous, donner les tensions u et u1 en fonction de e ou bien
les intensités i et i1 en fonction de i 0 sans poser aucune équation, ni faire de calculs
écrits.
b)
c)
R
2R
R
R
i
i
3R
8891
R
R u
i0
55.1
2R
i1
0428
B
R
techn
Micro
R
R
e2
R
ue e
t des
D
i0
C
R1 i1
R1
R2
v1
e Mé
caniq
39. S’appliquer à écrire soigneusement la loi des nœuds
et la loi des mailles dans la partie de circuit ci-contre
et en déduire les grandeurs de sortie v1 et i1 en v 0
fonction de grandeurs d’entrée v0 et i0 .
ure d
I
40. Tracer la caractéristique statique et en régime
lentement variable du dipôle ci-contre.
R
e
R
U
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
2R
A i2
iques
R
R
u
:211
i1
38. Le réseau ci-contre est linéaire en régime
continu.
Montrer que les deux variables intensité
choisies permettent d’exprimer toute
grandeur électrique. Écrire le nombre
nécessaire d’équations de maille ; comment
assurer leur indépendance ?
e1
Résoudre et exprimer i1 et i 2 en fonction de
e1 , e 2 et R .
u1
i0
318:
e
2320
R
R
R
.65.1
f)
e)
:196
d)
R
2
u
R
u
R
u
R
e
59:1
e
e
3R
2
6925
2973
7
a)
'LS{OHVQRQOLQpDLUHV
41. On donne ci-contre le symbole d’une diode et la
caractéristique du modèle diode idéale. Décrire le
fonctionnement de ce dipôle électrocinétique.
6925
2973
7
u
i
R
2320
:196
.65.1
u
i1
55.1
R
59:1
42. Déterminer i1 dans le réseau ci-contre (où la diode est
idéale) et en déduire l’intensité du courant i dans la
diode. Faire le calcul de deux façons d’abord e
graphiquement avec le point de fonctionnement, puis
avec les équations de maille.
On donne e = 10 V et R = 200 Ω .
8891
43. Dans le circuit ci-contre, la diode est idéale.
La fém du générateur est e(t ) = U sin ω t , et E = cste
avec E < U . Le régime est lentement variable.
À t = 0 on ferme l’interrupteur K , exprimer v(t ) et
représenter sur le même graphe e(t ) et v(t ) .
i
i
K
i
R
318:
u
0428
v
e(t )
iques
:211
E
i
i
44. La diode utilisée ici possède une tension seuil
VS = 0, 6 V et sa caractéristique linéarisée par morceaux
est donnée ci-contre.
Micro
techn
u
VS
u
ue e
t des
Dans le réseau ci-contre, ve (t ) = V0 sin ω t avec
V0 > VS , représenter ve (t ) et vs (t ) sur le même
graphe, en faisant apparaître clairement les v e (t )
phénomènes.
v s (t )
caniq
R
ure d
e Mé
5pJLPHVOLEUHVHWUpSRQVHVjXQpFKHORQGHWHQVLRQ
e Na
Écol
tiona
le Su
périe
45. Un dipôle RL série est fermé à t = 0 sur une source
idéale de tension continue E . On donne les relevés
expérimentaux ci-dessous : i(t ) et u R (u R ) , u R est
la tension aux bornes du conducteur ohmique. En E
déduire le fonctionnement et toutes les caractéris-
u
i
uR
&KDSLWUH
tiques du dipôle RL : valeurs de R, L, E, la constante de temps τ et l’équation
différentielle régissant le fonctionnement.
du R dt
mA
V.ms −1
10
6925
2973
7
i
.65.1
55.1
59:1
25
0,5
ms
0
5
V
2320
0
uR
:196
t
8891
46. Une bobine de résistance totale R = 0,91 Ω et d’inductance L = 0,83 mH est
associée en série avec un interrupteur et une source idéale de tension continue de
fém e 0 = 12,1 V .
:211
0428
318:
* Quelle est l’intensité i ∞ qui passe dans le circuit (interrupteur fermé) après le
régime transitoire ? Application numérique et commentaire.
* Établir l’expression de l’intensité i (t ) à la fermeture de l’interrupteur en faisant
apparaître un temps τ caractéristique d’une évolution exponentielle à exprimer en
fonction de R et L . Exprimer i (t ) en fonction de i ∞ , t et τ . Application
iques
numérique de τ .
ue e
t des
Micro
techn
47. Une source en représentation de Norton (cém I 0 et résistance interne R0 ) alimente
un condensateur, supposé parfait, de capacité C .
Sachant qu’à l’instant initial le condensateur est déchargé, établir l’expression de la
tension v(t ) aux bornes du condensateur.
Donner l’expression de v(t ) si on considère une source idéale de courant ;
commentaire.
K
i2
i1
L
R
C
u
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
ure d
e Mé
caniq
48. Dans le circuit ci-contre, E = cste ; à t = 0 , on
ferme l’interrupteur K . Pour t < 0 , i1 , i 2 et u sont
nuls.
du
aux dates E
Déterminer les valeurs de i1 , i 2 , u et
dt
suivantes :
a) à t = 0 +
b) au bout d’un temps très long.
55.1
59:1
6925
2973
7
49. Dans le réseau ci-contre, on ferme
R′
l’interrupteur K à l’instant t = 0 avec les
conditions initiales suivantes :
K
q′
q
q′(t = 0) = q0′ ( C ′ est initialement chargé)
R
u
q (t = 0) = 0 ( C est initialement déchargé)
C
C′
a) Établir l’équation différentielle donnant la
tension u (t ) aux bornes du dipôle RC .
b) Existe-t-il une relation à satisfaire entre les grandeurs R , R′ , C et C ′ pour que
la tension u puisse osciller ? Mener deux raisonnements, l’un physique, l’autre
par le calcul, pour argumenter la réponse.
.65.1
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
8891
2320
:196
50. Quelles sont les ordres de grandeur des vitesses suivantes, concernant les porteurs de
charge dans un métal (électrons libres) et le courant électrique : vitesse d’agitation
thermique, vitesse d’ensemble des porteurs correspondant à un courant électrique et
vitesse de propagation d’une variation du courant ?
0428
318:
51. Un dipôle qui n’est pas une association de conducteurs ohmiques peut-il se
comporter comme un conducteur ohmique ?
iques
:211
52. Comment déterminer la résistance équivalente d’un dipôle constitué d’une
association de conducteurs ohmiques alors que cette association n’est ni série ni
parallèle ? Chercher un exemple.
techn
53. Dans une guirlande lumineuse, comment sont placées les ampoules, en série ou en
parallèle ?
Micro
54. Une source de tension peut-elle fonctionner en récepteur ? Raisonner sur sa
caractéristique.
ue e
t des
55. Pourquoi la longévité d’une batterie s’apprécie-t-elle en A.h (batterie 12 V de
voiture par exemple) ou en mA.h (pour la batterie d’un téléphone par exemple) ?
caniq
56. La section du fil électrique pour un éclairage ( I max ≈ 16 A ) est de 1,5 mm2 et pour
une cuisinière ( I max ≈ 32 A ) de 6 mm2. Pourquoi cette différence ?
ure d
e Mé
57. Quel est, dans une installation domestique, le rôle d’un fusible ? d’une terre ? d’un
disjoncteur différentiel ?
e Na
Écol
tiona
le Su
périe
58. Les oiseaux peuvent se poser sur des câbles haute tension sans s’électrocuter,
pourquoi ?
&KDSLWUH
59. En termes de conduction électrique, on modélise le corps humain
selon le schéma ci-contre. On donne : R1 = 460 Ω , R 2 = 80 Ω ,
0428
318:
8891
2320
:196
.65.1
55.1
59:1
6925
2973
7
R3 = 125 Ω , R 4 = 15 Ω et R5 = 840 Ω . Le disjoncteur
différentiel domestique coupe le courant si la différence entre
l’intensité entrante et l’intensité sortante atteint 30 mA .
a) Comment justifier la valeur élevée des résistances brasjambes et la faible valeur de R 4 ?
b) Si l’on touche, avec une main, un fil porté à un potentiel de
220 V par rapport à « la terre », et que l’on n’est pas équipé
de semelles isolantes et donc potentiellement en contact
électrique avec « la terre », le disjoncteur coupera-t-il le
courant ?
c) Si maintenant on met un index dans chacun des trous d’une
prise de courant, les pieds n’étant pas en contact électrique avec le sol, les
fusibles de l’installation sont-ils protecteurs (ils sont choisis pour fondre au-delà
d’une intensité de 6 A ) ? L’opération précédente est-elle dangereuse sachant
que, si un courant d’intensité supérieure à 20 mA traverse pendant quelques
millisecondes un corps humain, il y a risque de tétanisation mortelle ?
d) Les travailleurs utilisant des appareils électriques dans des milieux très
conducteurs ont un système d’alimentation électrique fonctionnant sous très
basse tension. Quelle doit être la valeur maximale de cette tension ?
e Mé
([HUFLFHV
caniq
ue e
t des
Micro
techn
iques
:211
60. Dans le circuit ci-contre, K 1 et K 2
q2
i1 q1
i2
étant ouverts, les deux condensateurs
sont initialement déchargés. E = cste .
K1
C1
K 2 C2
a) L’interrupteur K 2 restant ouvert, on
ferme K 1 pendant un temps assez
E
long (à préciser) ; déterminer les E
R
valeurs des charges q1 et q2
définies sur le schéma.
b) On ferme alors l’interrupteur K 2 ; déterminer les nouvelles valeurs q1′ et q′2 des
charges q1 et q2 au bout d’un temps très long (à préciser). Quelle quantité
d’électricité Q a traversé la résistance R ?
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
ure d
61. Rendement d’un montage potentiométrique
Le rendement η de ce diviseur de tension est le rapport PR
iE
de la puissance dissipée dans la résistance de charge R à la
puissance PE fournie par la source de tension E .
E
Exprimer η en fonction de r1 , r2 et R .
AN : r1 = 750 Ω ; r2 = 250 Ω ; R = 80 Ω ;
commenter.
r2
iR
B
r1
R
A
6925
2973
7
62. Alimentation électrique du TGV
Dans cette partie de problème les grandeurs électriques sont sinusoïdales (régime
forcé sinusoïdal) et caractérisées par leur valeur efficace. Considérer dans tous les
calculs ces grandeurs comme continues (constantes) de valeur leur valeur efficace.
La puissance électrique est fournie au TGV à partir de sous-stations électriques
SS i =1,....,n que l’on assimilera à des sources idéales de tension efficace E = 25 kV et
I
λ (d − x)
TGV
U
λd
I2
E
E
8891
E
2320
λx
I1
:196
.65.1
55.1
59:1
de fréquence ν = 50 Hz . Ces sous stations sont implantées le long de la voie et
espacées d’une distance d = 60 km . Elles sont reliées par un fil conducteur, la
caténaire, suspendu au-dessus des rails. La motrice TGV reçoit l’alimentation de la
caténaire par un contact glissant appelé pantographe situé sur son toit. Tous les
moteurs de la motrice sont montés en parallèle entre le pantographe et les rails qui
servent de liaison masse à la terre. On peut schématiser le circuit d’alimentation sur
la figure 1.
318:
FIG.1bis
techn
iques
:211
0428
Pour notre étude se placer dans les conditions suivantes : le fil de la caténaire de
section s = 1, 47 cm 2 est en cuivre de résistivité ρ = 1, 72.10 −8 Ω.m . La tension des
sous-stations étant E = 25 kV , on suppose que l’intensité efficace du courant
circulant dans les moteurs est constante (indépendante de x) et vaut I = 600 A . Le
rail rectiligne est confondu avec l’axe Ox dont l’origine est placée à la dernière sousstation électrique atteinte par le TGV. La variable x est donc définie modulo d.
ue e
t des
Micro
a) Calculer la résistance R totale de la caténaire entre deux sous-stations, et la
résistance linéique λ en Ω.km −1 . Faire l’application numérique. Peut-on négliger
les différences de phases entre les divers points de la ligne entre deux sousstations ?
caniq
b) Déterminer les intensités I 1 ( x) et I 2 ( x) délivrées par les sous-stations encadrant
le TGV situé en x ainsi que la valeur U;xͿ de la tension effectivement disponible
aux bornes de la motrice située en x. Exprimer alors la puissance P dissipée par
effet Joule dans la caténaire. Voir figure 1bis.
périe
ure d
e Mé
c) Localiser la position x m de la motrice qui correspond à un minimum de la tension
d’alimentation des moteurs. Exprimer alors cette tension minimale en fonction de
E, R et I = I 1 + I 2 . Déterminer la valeur maximale Pm de la puissance dissipée
en fonction de R et I. Commenter ces résultats ainsi que les diverses applications
numériques afférentes.
e Na
Écol
tiona
le Su
d) Le dispositif réel d’alimentation dispose en fait d’un second fil (appelé ͨfeederͩ)
identique à la caténaire et déployé entre les deux sous-stations voisines. Au
milieu du parcours un contact est établi avec le fil de la caténaire, aboutissant à la
&KDSLWUH
schématisation de la figure 2. On
montre que la tension U f ( x) aux
bornes de la motrice s’écrit
maintenant :
x ( 2d − 3 x )
U f ( x) = E − λ
I
2d
d
pour 0 ≤ x ≤
2
d
, ainsi que sa valeur
2
Calculer la tension U f aux bornes de la motrice en x =
minimale.
Représenter sur un même graphique les fonctions U et U f pour x ∈ [0, d 2] .
Commenter le rôle du feeder.
96.6
5.15
5.15
9:16
9252
9890
R1 d
R1
R1
63. Modélisation d’une fibre nerveuse (*)
a
On considère le réseau dipolaire infini
ci-contre (appelé chaîne atténuatrice)
R2
R2
R2
constitué de cellules élémentaires du
type ( adeb ) et on note RT la résistance
b
e
équivalente du dipôle (on admet qu’il
existe une limite finie) entre a et b .
a) En comparant les résistances de la partie à droite de ( ab ) et de la partie à droite
de ( de ), déterminer RT en fonction de R1 et R2 .
b) Montrer que si la tension appliquée à l’entrée du réseau est Vab = V0 , alors
Vde = V0 /(1 + β ) et exprimer le coefficient β en fonction de RT , R1 et R2 . En
20:1
déduire la tension Vn , après n cellules élémentaires, en fonction de V0 , β et n .
5026
8:88
9123
AN : Pour un axone non myélinisé R1 = 0, 35 MΩ et R2 = 1,1 GΩ ; la longueur
d’une cellule élémentaire est ad = 10 ȝm . Déterminer l’atténuation de la
différence de potentiel sur une distance de 2, 0 mm .
R2
D
R3
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
Univ
ersité
de P
aris:2
1108
64. Pont de Wheatstone
Dans le circuit ci-contre appelé pont de Wheatstone, la
A
résistance R d est la résistance interne d’un détecteur de
R1
i1
courant (microampèremètre). Le pont est dit « équilibré »
quand l’intensité i1 du courant dans le microampèremètre
Rd
C
est nulle.
a) Si le pont est équilibré, que vaut la ddp. V A − V B ?
R4
b) Établir une condition nécessaire sur R1 , R 2 , R3 , R 4
B
pour que le pont soit équilibré. Cette condition est-elle
suffisante ?
c) Le pont de Wheatstone permet des mesures précises de
e
résistance, décrire un protocole expérimental de
mesure avec un pont de Wheatstone.
65. Décharge et recharge d’un condensateur
iR
i
En début d’expérience, l’interrupteur K est ouvert
depuis un temps très long (à préciser). Puis il est
iC
R1
fermé à l’instant t = 0 et l’on constate que la tension
K
u (t ) aux bornes du condensateur évolue avec une
u
C
constante de temps τ = 2, 0 ms . Au bout d’un laps de
R2
temps (très supérieur à τ ), l’interrupteur est rouvert E
et cette fois la tension aux bornes du condensateur
évolue avec une constante de temps τ ′ = 10 ms .
Donner les valeurs des intensités dans les trois branches et de la tension u à t = 0−
et t = 0+ , préciser la valeur de u à la réouverture de K . Établir ensuite les
expressions littérales de τ et τ ′ , puis montrer que les mesures faites donnent accès à
la valeur numérique du rapport des résistances R1 / R2 .
8:88
9123
20:1
96.6
5.15
5.15
9:16
9252
9890
66. Un autre aspect de la linéarité (*)
Dans le réseau ci-contre pour t < 0 , les
R
K
interrupteurs K et K ′ sont ouverts et le
u
condensateur est déchargé. À t = 0 , on ferme K
C
K′
( K ′ restant ouvert).
E
a) Quelle est la loi d’évolution u (t ) aux bornes
du condensateur ? Tracer le graphe de la
fonction u (t ) . Préciser la constante de temps τ d’évolution.
b) À la date t = T (attention T est quelconque, pas nécessairement grand), on
rouvre l’interrupteur K en fermant simultanément K ′ . Donner u (t ) depuis
l’instant t = 0 jusqu’à t T . Tracer le graphe de u (t ) .
c) On étudie la déformation de la courbe représentative de u (t ) lorsque l’on donne à
T des valeurs décroissantes, tout en augmentant E de telle sorte que le produit
E × T reste constant. On obtient le graphe 2 ci-dessous, justifier qualitativement.
u
u
graphe 3
aris:2
1108
u (T )
5026
α
τ
graphe 2
t
de P
t
Univ
ersité
T
niv.s
chola
rvox.
com:
d) On envisage maintenant le cas limite T → 0 et E → +∞ , toujours avec
E T = α = cste . On obtient le graphe 3 ci-dessus. Comparer cette réponse à la
réponse à l’échelon de tension (appelée aussi réponse indicielle) étudiée au a) ;
que représente ce graphe 3 par rapport à la réponse indicielle ? Ce résultat était-il
prévisible ? Pour répondre, comparer aussi l’échelon de tension appliqué dans le
&KDSLWUH
cas de la réponse indicielle et la tension appliquée au dipôle RC dans ce cas
limite.
67. Réponse à un échelon de tension d’un dipôle RLC parallèle
i
Le schéma du montage est indiqué cicontre. La source de tension est idéale
K
de fém E constante. Pour t < 0 , le
condensateur est déchargé et la bobine
idéale n’est parcourue par aucun
E
courant. À t = 0 , on ferme K.
i1
R
i2
L
C
i3
r
u
a) Déterminer, par raisonnement direct, les valeurs de u , i, i1 , i 2 et i3 à la date
9:16
9252
9890
t = 0 + et pour t → +∞ (concept à préciser).
b) Établir l’équation différentielle vérifiée par i3 , en posant :
R r C ω0
Rr
1
ω0 =
et Q =
=
.
(R + r) L ω0
R+r
LC
c) Donner la relation entre R, r, L et C pour que le régime soit de type
pseudopériodique et exprimer i3 (t ) dans ce cas.
20:1
96.6
5.15
5.15
68. Détecteur de crêtes
Le schéma du montage est indiqué cicontre. La source de tension est idéale
K
de f.é.m. e(t ) = E sin(ω t ) , la diode est
v(t )
R
e(t )
idéale (voir sa caractéristique et son
C
fonctionnement question 41.) et on
2π
considère RC T =
. Pour t < 0 , le condensateur est déchargé, à t = 0 , on
9123
ω
1108
5026
8:88
ferme K.
a) Étudier, en commençant par le cas diode passante, la tension v(t ) . Représenter
sur le même graphe e(t ) et v(t ) .
b) Justifier l’utilisation de ce montage en détecteur de crêtes. Comment choisir RC
pour suivre par exemple les maximums d’un régime pseudopériodique ?
aris:2
4XHVWLRQVRXYHUWHV
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
Univ
ersité
de P
69. Association optimale de piles pour un meilleur éclairement
Comment associer régulièrement (quelle combinaison série / parallèle ?) N = 24
piles de force électromotrice e = 1 V et de résistance interne r = 0, 2 Ω pour que,
branchées aux bornes d’une lampe de résistance R = 0,3 Ω , l’éclairement produit
soit maximal ? Quelle puissance reçoit alors la lampe ?
70. Influence de la résistance sur les constantes de temps des dipôles RC et RL (*)
Tracer sur le même graphe la tension u (t ) aux bornes du condensateur (pour une
réponse indicielle du dipôle RC série, réseau de la question 25.) pour deux valeurs
R 1 et R 2 > R1 de R avec u (0) = 0 .
Tracer sur le même graphe l’intensité du courant i (t ) dans la bobine (pour une
réponse indicielle du dipôle RL série) pour R 1 et R 2 > R1 avec i (0) = 0 .
Commentaires.
71. Quelle trajectoire (de phase !) ?
Les dipôles R L et R C ont même constante de temps et E = 10 V .
Pour t < 0 l’interrupteur K est ouvert (soit i = 0 ) et le condensateur est déchargé.
À t = 0 on ferme K .
L
i1
E
9890
i2
9252
i
R
K
u
R
5.15
9:16
C
niv.s
chola
rvox.
com:
Univ
ersité
de P
aris:2
1108
5026
8:88
9123
20:1
96.6
5.15
Trouver, parmi les quatre possibilités ci-dessous, quelle est la trajectoire de phase
(u , u ) correspondant au cas proposé. L’axe des abscisses est en V et celui des
ordonnées en V.ms −1 .
&KDSLWUH
72. Convertisseur parallèle
La figure ci-dessous représente un convertisseur 3 bits, il convertit une tension
analogique u (avec 0 < u < Vréf ) en un nombre s N en base deux. Il est composé de 7
comparateurs, d’une logique de codage et de conducteurs ohmiques de résistances
r , 2r et 3r . Les comparateurs ont une résistance d’entrée infinie : l’intensité du
courant sur les deux bornes d’entrée est nulle. Ils délivrent un signal logique qui est
au niveau haut (valeur 1) lorsque la borne reliée à u a un potentiel supérieur à celui
de la borne reliée à Vréf par l’intermédiaire des résistances. Le signal logique est de
valeur 0 sinon.
La logique de codage convertit la sortie des comparateurs (nombre de valeurs 1) en
un nombre binaire s N .
1
2
3
2r
5
4
6
7
9:16
logique de codage
22
r
2r
9890
u
2r
2r
9252
Vréf
2r
2r
3r
21
5.15
5.15
20
Vréf = 2, 00 V , quelle est la valeur numérisée s N de u = 1,32 V ?
5026
8:88
9123
20:1
96.6
73. Durée de la décharge d’un défibrillateur
Un condensateur chargé de (grande) capacité C = 470 ȝF schématise un défibrillateur destiné à lutter contre un trouble du rythme cardiaque pouvant conduire à un
infarctus. Le défibrillateur est relié au patient par deux électrodes. Une partie de
l’énergie stockée par le condensateur lors de sa charge est alors libérée dans le
thorax du patient, afin de rétablir un rythme cardiaque normal. Le défibrillateur est
réglé pour délivrer au patient une énergie de 300 J .
Estimer la durée d’une décharge.
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
Univ
ersité
de P
aris:2
1108
Données :
* la charge du condensateur
du défibrillateur conduit
au portrait de phase cicontre, grâce à un dipôle
série RC alimenté par
une source de tension E
(voir le schéma à la
question 25.).
5.15
9:16
9252
9890
* la figure de gauche ci-dessous modélise les résistances des parties du corps
humain, avec R 1 = 460 Ω , R 2 = 80 Ω , R 3 = 125 Ω , R 4 = 15 Ω et R 5 = 840 Ω ;
celle de droite indique l’emplacement des électrodes du défibrillateur.
u2
u1
v
E2
1108
E1
de P
aris:2
e (t )
8:88
R
K
5026
i
9123
20:1
96.6
5.15
74. Tronçonneur
Dans le circuit ci-dessous, les diodes sont idéales.
La fém du générateur est e(t ) = U sin ω t et le régime lentement variable.
E1 = cste avec 0 < E1 < U et E 2 = cste avec 0 < E 2 < U .
À t = 0 on ferme l’interrupteur K , représenter la tension v(t ) avec un minimum de
calculs.
Univ
ersité
7UDYDX[SUDWLTXHV
niv.s
chola
rvox.
com:
Les multimètres ont les spécifications suivantes :
Voltmètre : AC ( f < 1 kHz ) : 2% + 3 ; DC : 0, 09% + 2 ; résistance d’entrée 10 MΩ
Milliampèremètre : AC ( f < 1 kHz ) : 1,5% + 3 ; DC : 0,5% + 3
Ohmmètre : ( < 600 Ω ) 0,5% + 2 ; ( > 600 Ω ) 0,5% + 1
&KDSLWUH
75. On veut établir la relation entre tension et intensité, pour
un dipôle conducteur métallique. On relève, avec deux
multimètres, tension aux bornes et intensité :
V
mA
U (V)
–4,816
–3,428
–2,749
–1,832
–0,964
0,830
I (mA)
–9,68
–6,88
–5,51
–3,68
–1,94
1,67
1,356
2,410
3,538
4,669
5,165
2,73
4,83
7,10
9,39
10,37
Faire une étude graphique des mesures expérimentales et conclure sur la loi d’Ohm.
I
voie 1
mA
U
R
2,5
2,25
1,65
I (mA)
0
2,46
4,62
7,89
0,80
0,64
0,16
14,35
16,57
19,84
5.15
2,7
1,40
1,30
9,45
12,0
20:1
96.6
U (V)
5.15
9:16
9252
9890
76. On étudie maintenant un dipôle actif de type source. Les
mesures sont faites à l’oscilloscope (précision des
amplificateurs 3%) en couplage DC pour la tension, et
avec un milliampèremètre pour l’intensité. On fait varier
la résistance R et on relève tension aux bornes et source
intensité. La résistance d’entrée de l’oscilloscope est de
10 MΩ. On utilise, sur l’oscilloscope, les amplifications
0,5 V/div. puis 0,2 V/div.
8:88
9123
Faire une étude graphique des mesures expérimentales et conclure sur un modèle de
comportement de la source.
Univ
ersité
de P
aris:2
1108
5026
77. Après avoir établi le comportement linéaire d’un réseau dipolaire en régime continu,
comme à la question précédente, on veut mesurer la fém et la résistance interne de la
source de Thévenin équivalente. On effectue, avec un multimètre les mesures
suivantes :
a) La tension à vide (seul le voltmètre est branché en sortie) est U 0 = 2, 743 V .
b) On place ensuite en sortie du réseau dipolaire une résistance de valeur R réglable
et on mesure la tension à ses bornes. On fait varier R et quand la tension est égale
U
à 0 , on débranche la résistance et on la mesure avec le multimètre en fonction
2
ohmmètre. Il indique R1 = 129, 4 Ω .
En déduire e et r avec leur incertitude de mesure.
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
78. Quelle différence (chiffrée) existe-t-il entre une bobine réelle et une bobine idéale ?
Même question entre un condensateur réel et un condensateur idéal ?
79. Comment mesurer sur la courbe de charge d’un dipôle RC, affichée sur l’écran d’un
oscilloscope (question 25.), la constante de temps τ de ce système du 1er ordre ?
80. Pourquoi expérimentalement n’est-il pas possible de voir des oscillations
sinusoïdales pour une association bobine-condensateur, correspondant à l’étude
théorique du dipôle LC de la question 26. ? Qu’observe-t-on lorsqu’un tel système
est attaqué par une fonction créneau (un échelon de tension périodique) dont on
choisit correctement la gamme de fréquences ?
9252
9890
81. Indiquer les branchements à effectuer sur le montage de la question 67. pour
observer à l’oscilloscope la tension u (t ) . Quel problème se pose-t-il si on veut
visualiser simultanément u (t ) et R i (t ) ?
On choisit : R = r = 1, 0 kΩ , C = 1, 0 ȝF et L = 10 mH . Quel est l’ordre de
grandeur du temps caractéristique d’évolution de la tension u (t ) ?
Comment procéder pour visualiser u (t ) :
a) avec un oscilloscope analogique ?
b) avec un oscilloscope numérique ?
niv.s
chola
rvox.
com:
Univ
ersité
de P
aris:2
1108
5026
8:88
9123
20:1
96.6
5.15
5.15
9:16
82. Une diode (utiliser la modélisation de la question 44.) est utilisée pour redresser une
tension sinusoïdale u (t ) ; chiffrer les précautions à prendre sur u (t ) pour que la
tension redressée soit conforme aux attentes.
&KDSLWUH
5pSRQVHVDX[TXHVWLRQV
/HFRXUVG·DERUG
/HVORLVHWOHVFRQYHQWLRQVGHO·pOHFWURFLQpWLTXH
Deux charges de signes contraires s’attirent :
+
+
;
−
−
−
9252
+
9:16
Deux charges de même signe se
repoussent :
9890
1. La charge est une caractéristique d’une particule qui fait qu’elle subit l’interaction
électromagnétique.
On distingue deux classes de charges électriques :
charges négatives (classe de l’électron)
charges positives (classe du proton)
5.15
5.15
La charge est toujours conservée ; la charge totale d’un système fermé
(n’échangeant pas de matière avec l’extérieur) est donc constante. Ce qui signifie
que si des charges positives sont formées par exemple par ionisation, des charges
négatives apparaissent en même quantité dans le système.
9123
20:1
96.6
La charge est quantifiée : il existe une charge élémentaire notée e et qui vaut
e = 1, 6 . 10 −19 C .
Cela signifie qu’il n’existe pas de particule libre ayant une charge entre 0 et e ou
entre e et 2e .
8:88
L’électron porte la charge −e et le proton la charge + e .
de P
aris:2
Un porteur de charge est une particule qui possède une charge électrique.
Un milieu conducteur électrique est un corps à l’intérieur duquel des charges
électriques peuvent être mises en mouvement sous l’action d’une force aussi petite
soit-elle. Elles se déplacent librement dans le conducteur, par exemple :
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
Univ
ersité
• métaux : les porteurs de charge sont les électrons libres (ou électrons de
conduction), ce sont des porteurs .
• électrolytes (solutions ioniques) : il y a deux types de porteurs, les cations
(porteurs ⊕ ) et les anions (porteurs ).
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
1108
5026
Cette quantification n’apparaît pas à l’échelle macroscopique où les échanges de
charges même très faibles se font par milliards de charges élémentaires. Du coup la
charge apparaît comme une grandeur continue.
Rq : En général les conducteurs sont globalement neutres, les déplacements des
porteurs ne correspondent pas à une apparition de charge, mais seulement à une
répartition différente dans l’espace.
9123
20:1
96.6
5.15
5.15
9:16
9252
9890
2. Un courant électrique correspond à un déplacement d’ensemble de charges
électriques. Cela ne correspond pas aux déplacements microscopiques dus à
l’agitation thermique, de valeur moyenne nulle.
En pratique il s’agit du déplacement d’ensemble de porteurs de charge : électrons
dans un métal, ions dans un électrolyte, sous l’effet par exemple, d’une action
extérieure du type tension électrique.
Le sens du courant est le sens de déplacement des porteurs de charge positive.
L’orientation du conducteur permet de décrire, de façon mathématique, le sens du
courant : le sens du courant est positif s’il est dans le sens d’orientation, le sens du
courant est négatif s’il est dans le sens opposé au sens d’orientation. Attention
positif et négatif s’appliquent au sens du courant et pas au courant !
L’intensité i du courant électrique est une variable mathématique algébrique
décrivant le courant électrique pour deux de ses caractéristiques : le signe de i
correspond au sens du courant et i correspond à la grandeur de ce courant (c’est-àdire s’il est important ou faible). L’intensité s’exprime en C.s–1, soit en ampères (A),
il s’agit (en valeur absolue) du débit de charge à travers une surface donnée.
On remarque que l’intensité ne dépend donc pas que du courant électrique qu’elle
est censée décrire, mais aussi d’une surface à travers laquelle passent les charges et
qui apparaît dans sa définition : on parle d’intensité à travers une surface. On verra
plus tard qu’il existe une grandeur plus fondamentale : le vecteur densité de courant.
Dans le cas d’un conducteur filiforme, la surface est implicitement une section du
fil.
Courant et intensité sont donc radicalement différents. Le courant est un phénomène
physique, son sens n’a rien à voir avec l’orientation. L’intensité du courant est une
variable mathématique algébrique, son signe dépend du choix d’orientation.
Si i = cste , indépendante du temps, en tout point : le régime est dit continu.
Univ
ersité
de P
aris:2
1108
5026
8:88
3. Il s’agit de l’ARQS :
a) Considérons d’abord un régime continu : toutes les grandeurs électriques sont
indépendantes du temps. Soit une portion de conducteur filiforme comprise entre
deux sections A et B. On a donc i A et i B indépendants du temps. Si la charge
« entrant » en A pendant dt , dq A = i A dt était différente de celle « sortant » en B,
dq B = i B dt , alors cette différence constante au cours du temps se traduirait par
une augmentation de la charge (en valeur absolue) dans le volume compris entre
A et B. Ce qui est en contradiction avec l’hypothèse régime continu. Donc
dq A = dq B et i A = i B l’intensité du courant est la même en tout point d’une
même branche du circuit.
niv.s
chola
rvox.
com:
b) Dans le cas d’un régime variable, les grandeurs électriques dépendent du temps.
Le raisonnement précédent ne peut plus s’appliquer car la charge dans l’élément
de volume entre A et B peut varier avec t ! A priori on peut avoir i A ≠ i B au
même instant. Plus précisément, c’est ce qui se passe : i dépend du temps et du
&KDSLWUH
point du circuit car la variation dans le temps de l’intensité ne peut pas se
répercuter instantanément en tout point du circuit (la vitesse de propagation de
l’information est très grande mais finie, de l’ordre de c ≈ 3.10 8 m.s −1 ).
B
A
AB ·
§
i B (t ) = i A ¨ t −
¸
c ¹
©
Pour avoir i A (t ) ≈ i B (t ) , il faut :
AB
durée caractéristique d’évolution du courant, par exemple la période T si
c
l’intensité est une fonction périodique du temps.
9890
C’est l’ARQS : si la variation de i (t ) est assez lente pour pouvoir négliger la
durée de propagation, on considère que i (t ) est la même, à chaque instant, en tout
point d’une même branche.
AB c T =
3.10 8
≈ 6 000 km , à l’échelle d’une ville, à 50 Hz,
50
9:16
Ɣ à 50 Hz
9252
Numériquement :
l’ARQS est respectée.
3.10 8
≈ 30 cm , dans un ordinateur tous les centimètres
10 9
5.15
AB c T =
5.15
Ɣ à 1 GHz
96.6
comptent.
soit
¦ε i = 0
Univ
ersité
i1 + i 3 = i 2 + i 4
k k
k
rvox.
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
i1
i2
N
i4
i3
com:
avec ε k = +1 si flèche est dirigée vers N
avec ε k = −1 si flèche part de N
de P
aris:2
4. La loi des nœuds est relative à la conservation de la charge (les électrons de
conduction) ; elle traduit que la somme des charges arrivant effectivement en un
point est égale à la somme des charges qui en repartent, condition nécessaire au
régime continu.
Au nœud N , les i k représentant les intensités algébriques on a :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
1108
5026
8:88
9123
20:1
Pour bien comprendre l’ARQS, on peut utiliser l’analogie entre le courant
électrique et le déplacement des maillons d’une chaîne de vélo : à partir de
l’immobilité, on provoque une mise en mouvement, par action du plateau, quasi
simultanée de tous les maillons (c’est l’ARQS), mais on conçoit que tous ne se
mettent pas en mouvement simultanément. Ce sont ceux proches du plateau qui
commencent à bouger en premier, et ceux vers le pignon avec un léger retard. La
vitesse de mise en mouvement de l’ensemble de la chaîne dépend de sa tension.
En régime stationnaire il y a un déplacement d’ensemble avec la même vitesse en
tout point de la chaîne (comme pour le courant électrique).
Cette loi est valable en régime variable, à tout instant, dans le cadre de
l’approximation des régimes quasi stationnaires (ARQS).
5. Les dipôles et leur représentation sont étudiés dans la partie TP.
En convention récepteur, (flèches de tension et d’intensité en sens opposé) :
Ri
i
R
e
i
R
u
u
u = Ri
u = Ri−e
En convention générateur, (flèches de tension et d’intensité dans le même sens) :
Ri
R
e
9890
i
R
u
u
u = −R i
9252
i
9:16
u =e−Ri
5.15
Ces relations sont valables avec u, i et e algébriques. Remarquer qu’en série les
tensions s’ajoutent, en tenant compte du sens des flèches.
96.6
5.15
6. Un dipôle AB quelconque traversé par un courant d’intensité
i AB et dont la tension aux bornes est u AB = V A − V B , reçoit
(algébriquement) pendant dt , en A, le travail dq V A et cède
20:1
(algébriquement) pendant dt , en B , le travail dq V B . Il reçoit
A
B
i AB
u AB
8:88
9123
donc algébriquement δ W = dq (V A − V B ) = i AB dt u AB , et la puissance P =
La puissance algébrique reçue par un dipôle quelconque est
dt
.
P = u AB i AB
1108
5026
Si P > 0 le dipôle fonctionne en récepteur.
Si P < 0 le dipôle fonctionne en générateur.
δW
Univ
ersité
de P
aris:2
Récepteur ou générateur ne qualifie pas un type de dipôle mais un mode de
fonctionnement. Un condensateur, par exemple, fonctionne en régime sinusoïdal
forcé alternativement en récepteur et en générateur. En revanche actif et passif sont
des qualificatifs de type de dipôle. Pour un dipôle passif : u = 0 i = 0 , ce qui
n’est pas le cas d’un dipôle actif. Pour un dipôle actif il existe des conditions de
fonctionnement pour lesquelles il peut fournir du travail sur une durée arbitrairement
grande.
niv.s
chola
rvox.
com:
Assez couramment cependant le terme «générateur» est utilisé pour désigner un
dipôle actif fonctionnant en générateur !
&KDSLWUH
2
7. La puissance reçue par un conducteur ohmique est donc P = u AB i AB = R i AB
> 0,
un conducteur ohmique est donc toujours récepteur. Le travail électrique ainsi reçu
est ensuite entièrement restitué sous forme de chaleur, c’est l’effet Joule. Ce que
devient cette chaleur dégagée dépend du dispositif réel, cela ne relève plus de
l’électrocinétique, mais plutôt de la thermodynamique. Une partie de cette chaleur
peut être captée par l’élément matériel constituant le conducteur ce qui augmente
son énergie interne et donc sa température. La chaleur peut aussi être évacuée vers
l’extérieur (ventilation) et la température du conducteur reste alors constante.
8. Si R1 et R2 sont en série, alors elles sont parcourues par
le même courant d’intensité i ; en notant u1 et u2 les
tensions à leurs bornes, orientées dans le même sens, la
tension totale est :
u = u1 + u2 = R1i + R2i = ( R1 + R2 )i ou encore u = Réq i
i
R2
u1
u2
u
9890
Réq = R1 + R2
avec
R1
PT = P1 + P2
9:16
9252
La puissance totale dissipée est PT = Réq i 2 = R1i 2 + R2i 2 soit
Si R1 et R2 sont en parallèle, alors elles ont leurs bornes
5.15
communes et sont soumises à la même tension u ; en notant i1
i2
i1
u R
1
R2
1
1
1
= +
Réq R1 R2
PT = P1 + P2
condition : R1 et R2 en série.
5pJLPHVFRQWLQXHWWUDQVLWRLUH
u2
u
com:
R2
R1 + R2
rvox.
u2 = u
niv.s
chola
soit
Univ
ersité
de P
aris:2
9. Diviseur de tension. Lorsque deux résistances R1 et R2 sont parcourues par le même
courant d’intensité i , alors u 2 , la tension aux bornes de l’une, est une fraction
(proportionnelle à R2 ) de la tension totale u aux bornes de l’ensemble :
u
u2 = R2i = R2
R1
R2
R1 + R2
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
5026
u2 u2 u2
soit également
= +
Réq R1 R2
1108
La puissance totale dissipée est PT =
R1R2
R1 + R2
8:88
Réq =
20:1
u
u § 1
1 ·
u
+
= ¨ + ¸ u ou encore i =
avec
R1 R2 © R1 R2 ¹
Réq
9123
i = i1 + i2 =
96.6
5.15
et i2 les intensités des courants qui les traversent, orientées
dans le même sens, l’intensité dans la branche principale est :
i
Ce résultat se généralise à n résistances en série : la tension se divise proportionnellement aux résistances.
Diviseur d’intensité. Lorsque n résistances R j en parallèle sont soumises à la même
tension u , alors ik , l’intensité du courant qui traverse Rk , est une fraction
1
(proportionnelle à la conductance G k =
) de l’intensité du courant total i qui
Rk
traverse l’ensemble :
Gk
u
u §
1 ·
ik =
et i =
= ¨¦
u soit ik = i
¸
Rk
Req ¨© j R j ¹¸
¦G j
j
Dans le cas particulier de deux résistances seulement en parallèle :
Attention au sens des flèches de définition des deux intensités.
R2
R1
9890
1 / R2
1 / R1 + 1 / R2
i2
i
9252
i2 = i
R1
i2 = i
R1 + R 2
5.15
5.15
9:16
10. Un nœud est un point du réseau relié à plus de deux dipôles ( N ≥ 3 ). Une branche
est l’ensemble des dipôles en série entre deux nœuds (dans le cadre de l’ARQS ils
sont à tout instant parcourus par un courant dont l’intensité à la même valeur en tout
point de la branche). Une maille est un parcours fermé, constitué de branches et ne
passant qu’une fois au plus par un nœud donné.
96.6
B
20:1
une maille
9123
une branche
5026
8:88
A est un noeud, B non.
1108
A
de P
aris:2
Les liaisons entre dipôles sur les schémas représentatifs ne correspondent pas aux
fils réels de liaison du circuit. On prend en compte la résistance du fil réel en
ajoutant en série dans la branche un conducteur ohmique de résistance
correspondante.
11. Le long d’une maille, la somme des différences de
u2
potentiel rencontrées est nulle car en revenant au point de
départ, on retrouve le même potentiel. Plus précisément
la somme des tensions, prenant en compte leur définition
(sens de la flèche), est nulle :
Le long de la maille représentée (les branches sont u1
symbolisées par de simples traits) :
niv.s
chola
rvox.
com:
Univ
ersité
u3
u4
u5
&KDSLWUH
u1 + u 2 − u 3 + u 4 − u 5 = 0
¦ε u = 0
Plus généralement :
k
k
k
ε k = +1 si on rencontre d’abord la pointe de la flèche (car u AB = V A − V B )
ε k = −1 si la flèche est dans le sens de parcours de la maille.
Les u k de la formule sont algébriques, leurs signes n’ont rien à voir avec les ε k .
Il est possible aussi d’écrire directement que la tension entre deux points est égale à
la somme des tensions aux bornes des branches ou des dipôles qui relient ces deux
points. Voir par exemple la question 5. (tension aux bornes d’une source).
9890
12. Loi des mailles et loi des nœuds constituent les lois de Kirchhoff. Ce sont les lois
fondamentales de l’électrocinétique, valables en régime variable dans le cadre de
l’ARQS et indépendantes de la linéarité ou non des équations de branches. Ces lois
fournissent le nombre nécessaire et suffisant d’équations pour résoudre le réseau.
9252
'LS{OHVHWDVVRFLDWLRQ
5.15
5.15
9:16
13. La résistance d’un conducteur ohmique cylindrique augmente si sa longueur
augmente (ce qui paraît normal), diminue si la conductivité σ du matériau
augmente (c’est un meilleur conducteur), diminue si la section augmente (plus le
conducteur a un grand diamètre et plus sa résistance est petite : le courant passe plus
facilement).
20:1
96.6
14. Une source idéale de tension est un dipôle qui maintient à ses bornes une tension
constante c’est-à-dire indépendante de l’intensité du courant qui la traverse.
Ce dipôle théorique est représenté par :
e
A
B
9123
e est la force électromotrice (fém)
A
B
i AB
u BA
e
aris:2
u BA
1108
En convention « générateur »
u BA = e = cste
d’où la caractéristique :
i AB
5026
e
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
Univ
ersité
de P
La caractéristique expérimentale (donnée question 76.), peut être linéarisée en
u BA = e − r i AB , soit une association série d’une source idéale et d’un conducteur
1
ohmique de résistance r . La pente de la caractéristique est − , pour être idéale
r
(caractéristique de pente infinie) il faut donc que la résistance interne r → 0 . Elle
se comporte comme une source idéale si on place à ses bornes une résistance
d’utilisation Ru r ou en circuit ouvert ( Ru → +∞ ).
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
8:88
i AB
15. Une source idéale de courant est un dipôle qui délivre un courant d’intensité
constante c’est-à-dire indépendante de la tension à ses bornes.
Ce dipôle théorique est représenté par :
A
B
i0
i 0 est le courant électromoteur (cém)
En convention « générateur »
i AB = i 0 = cste
d’où la caractéristique :
A
i AB
B
i0
i0
u BA
u BA
9:16
9252
9890
La caractéristique expérimentale (donnée question 76.) peut être linéarisée en
u
i AB = i0 − BA , soit une association parallèle d’une source idéale de courant et d’un
r
1
conducteur ohmique de résistance r . La pente de la caractéristique est − , pour
r
être idéale (caractéristique de pente nulle) il faut donc que la résistance interne
r → ∞.
96.6
5.15
5.15
16. Un circuit formé de conducteurs ohmiques n’a aucun intérêt, pas d’énergie
disponible. On considère plutôt l’association entre deux bornes conduisant à un
réseau dipolaire passif. Par exemple des associations série ou parallèle (voir la
question 8.). Attention la notion d’association série par exemple n’a pas de sens pour
un circuit, elle ne s’applique qu’à une structure dipolaire.
20:1
17. En série les tensions s’ajoutent, donc eeq = e1 + e 2 (si les deux flèches des fém sont
A
9123
dans le même sens), les deux résistances internes sont en série donc Req = R1 + R 2 .
A
e2
R2
5026
R1
aris:2
18. On cherche l’intensité i et la tension u AB
i A
ri
e
R+r
r
u
R
Ri
e
B
niv.s
chola
rvox.
com:
i =
Univ
ersité
de P
Méthode 1 :
­u = e − r i
le système de 2 équations à 2
®
¯u = R i
inconnues donne :
R eq
eeq
1108
e1
B
8:88
B
&KDSLWUH
Méthode 2 :
On trace les deux caractéristiques des deux dipôles associés, en gardant les
orientations. Le fonctionnement ne peut se faire qu’avec des valeurs communes pour
les deux dipôles les coordonnées u et i du point de fonctionnement.
Attention aux notations dans le tracé des caractéristiques, u et i sont réservées pour
le point d’intersection.
I
I A
rI
I
A
•
i
r
U = e − rI
U = RI
R
U
RI
u
e
B
B
9890
Cette méthode du point de fonctionnement marche aussi avec des dipôles non
linéaires.
q
C
i=C
ou
du
dt
5.15
u=
A
C
B
u
96.6
question 20.), les relations sont :
5.15
9:16
9252
19. Un condensateur parfait soumis à une tension u AB acquiert une charge
q A = C (V A − V B ) = C u AB . Il vient q B = − q A , indépendamment du signe de q A .
dq
q
(voir la
Avec les orientations choisies : q = C u et i = +
i
dt
L
B
u
5026
8:88
9123
20:1
Une bobine parfaite parcourue par un courant variable est le
i
siège de phénomènes dits d’induction qui créent une tension à
di
A
ses bornes : u AB = L AB
dt
di
Avec les orientations choisies : u = L
dt
Un condensateur réel est fabriqué avec un isolant qui n’est pas
parfait, des charges peuvent passer d’une armature à l’autre à
travers l’isolant, ce qui peut se modéliser par une résistance, de
grande valeur, en parallèle sur un condensateur parfait, d’où le
modèle R C parallèle. R est appelée résistance de fuite.
L
Univ
ersité
Une bobine réelle possède une résistance correspondant au fil
avec lequel elle est fabriquée, d’où le modèle R L série.
C
R
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
20. Suivant les choix des variables algébriques intensité et charge, la relation est
différente :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
de P
aris:2
1108
R
Avec le choix ci-contre, si q (peu importe son signe) augmente, soit
dq
> 0 , alors cela signifie que des charges positives arrivent sur
dt
l’armature portant la charge q et donc i > 0 , et :
i=+
q
i
dq
dt
(pour q > 0 et i > 0 , cela correspond à une charge du condensateur)
q
Dans l’autre cas :
i
i=−
et
dq
dt
9890
Le signe moins ne signifie en aucun cas que i soit négatif, mais seulement que les
dq
valeurs algébriques de i et
sont opposées.
dt
(pour q > 0 et i > 0 , cela correspond à une décharge du condensateur)
5.15
1 2
Li
2
96.6
Em =
5.15
9:16
9252
21. Conformément à la question 6., la puissance reçue par une bobine est :
di
d §1 2 ·
P (t ) = u AB (t ) iAB (t ) = L AB iAB = ¨ L iAB
¸
dt
dt © 2
¹
JG
d’où son énergie magnétique (liée à la présence du champ B dans la bobine) :
8:88
1 2 1 q2
Cu =
2
2 C
5026
Ee =
9123
20:1
La puissance reçue par un condensateur est :
du
d §1 2 ·
P (t ) = u AB iAB = u AB C AB = ¨ Cu AB
¸
dt
dt © 2
¹
JG
d’où son énergie électrique (liée à la présence du champ E entre les armatures) :
de P
aris:2
1108
22. L’énergie emmagasinée dans un dipôle est une grandeur continue dans le temps
(sinon la puissance reçue – donc fournie par un générateur – serait infinie !).
L’intensité à travers une bobine est donc continue et il en est de même de la tension
(et de la charge) aux bornes d’un condensateur.
La condition
Univ
ersité
23. La puissance reçue par la charge Ru est P = Ru i 2 = Ru
dP
= 0 conduit facilement à la relation
dRu
Ru = Rg
dite d’adaptation
niv.s
chola
rvox.
com:
d’impédance.
E2
.
( Rg + Ru ) 2
&KDSLWUH
/HGLS{OH5&HWOHGLS{OH5/
24. Le régime libre correspond à une évolution en l’absence d’apport d’énergie extérieure, soit, en électrocinétique, en l’absence de source.
Dipôle RC : Après choix des variables, il vient
Ri
9890
dq
­
° i = dt
°
q
°
i
R
® uC =
q u
C
C
°
C
° R i + uC = 0
°
¯
Système de trois équations à trois inconnues (i, q et u C ). Après élimination
du
di
+i =0
évidente, il vient : RC C + u C = 0 ou bien RC
dt
dt
9252
Dipôle RL : Après choix des variables, il vient
uL
i
9:16
di
­
°uL = L
dt
®
°¯ u L + R i = 0
L
5.15
Ri
5.15
R
9123
20:1
96.6
Système de deux équations à deux inconnues (i et u L ). Après élimination évidente,
L du L
L di
+ u L = 0 ou bien
+i =0
il vient :
R dt
R dt
τ
dy
+ y =0
dt
8:88
Il s’agit dans tous les cas d’un système linéaire du premier ordre :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
Univ
ersité
de P
aris:2
1108
5026
25. Pour le dipôle RC série attaqué par un échelon de tension E à t = 0 , il vient :
­
Ri
°E = R i + u
°
q
°
i
®u =
R
C
q u
°
E
C
dq
°
°̄ i = dt
du
On a alors l’équation différentielle : τ
+ u = E avec τ = RC
dt
La solution est la somme de la solution générale de l’équation sans second membre
K e −t /τ et de la solution particulière constante E , soit u (t ) = K e−t /τ + E ; la
condition initiale est u (0+ ) = u (0− ) = 0 car u aux bornes du condensateur est
continue et à t = 0 − la charge est nulle, ce qui donne K = − E , d’où :
u (t ) = E (1 − e − t /τ )
La durée τ est celle pour laquelle la tangente à l’origine coupe l’asymptote u = E .
9890
Au début (à la fermeture de l’interrupteur) le
u (t )
condensateur est déchargé et sa tension est
E
nulle ; la différence de potentiel aux bornes de
la résistance est donc importante (elle vaut E )
ce qui génère un courant ( i = u R / R ) qui
0, 63E
charge le condensateur (on notera la
discontinuité de l’intensité à t = 0 ). Mais au
fur et à mesure que le condensateur se charge,
sa tension s’élève et comme celle du
τ
0
t
générateur reste constante, la différence de
potentiel aux bornes de la résistance diminue et donc l’intensité du courant
également, ce qui ralentit la charge. Le phénomène s’arrête lorsque u = E et i = 0 .
Le régime transitoire dure quelques τ ; pour t = 5τ par exemple, la partie u G de la
9:16
9252
solution n’est plus que le millième du régime forcé u P = E . Après ces quelques τ ,
le régime forcé continu ( u = E et i = 0 ) est établi.
20:1
96.6
5.15
5.15
Le régime forcé s’obtient sans passer par l’équation différentielle de la façon
suivante : le générateur de fém constante impose un second membre constant, donc
le régime forcé est continu et toutes les grandeurs sont constantes en régime forcé ;
les grandeurs en régime forcé sont notées avec un indice ∞ , il vient :
dq
i ∞ = ∞ = 0 et u ∞ = E + 0 = E .
dt
9123
/HGLS{OH/&HQUpJLPHOLEUH
1108
5026
8:88
26. Régime libre signifie que le système est abandonné à luimême, en l’absence de générateur dans le circuit. Pour
que l’évolution ne corresponde pas à des valeurs
constamment nulles, il faut disposer d’énergie au départ :
à l’instant initial le condensateur est chargé ou bien un
courant traverse la bobine.
L
i
di
dt
q
L
C
q
C
de P
il vient
d 2q
1
q=0
+
2
dt
LC
Univ
ersité
­ di q
°° L dt + C = 0
®
°i = dq
°̄ dt
aris:2
Loi des mailles et relation entre variables fournissent le
nombre d’équations nécessaire :
du type
d 2q
+ ω02 q = 0
dt 2
niv.s
chola
rvox.
com:
Cette équation différentielle admet comme solution des oscillations sinusoïdales de
pulsation :
&KDSLWUH
ω 0 = 1 / LC
LCω 20 = 1
ou encore
La solution est q (t ) = q0 cos(ω0 t ) si l’on note q0 la charge initiale du condensateur
( q (0+ ) = q (0− ) = q0 car q (t ) est continue comme i(t ) ) ; les autres grandeurs uC (t )
(en phase avec q (t ) ) et i (t ) (en quadrature avec q(t ) ) sont également sinusoïdales
de même fréquence.
Cette modélisation est assez éloignée de la réalité car les fils de liaison et la bobine
ne peuvent pas avoir une résistance nulle. En pratique le régime purement sinusoïdal
prévu par ce modèle n’est pas observé (voir un peu plus loin le dipôle RLC).
27. L’étude de la question précédente, avec les conditions initiales choisies donne :
­° q (t ) = q 0 cos ( ω 0 t )
­° q = q 0 cos ( ω 0 t )
®
®
°̄ q ( t ) = − q 0 ω 0 sin ( ω 0 t )
°̄ q ω 0 = − q 0 sin ( ω 0 t )
soit les équations paramétriques d’un cercle : q 2 + ( q ω 0 ) = q 02
9890
2
9:16
Pour q (q) , la courbe au lieu d’être inscrite dans un carré de
9252
La courbe fermée indique le caractère périodique du mouvement.
q
96.6
5.15
5.15
coté 2 q 0 , est inscrite dans un rectangle ( 2 q 0 , 2 q 0 ω 0 ) , c’est
une ellipse. On trouve le sens de parcours d’une trajectoire de
phase en considérant l’ordonnée d’un point de la trajectoire
de phase : par exemple si en ce point q > 0 alors q / à
partir de ce point.
q
20:1
di q
+ = 0 de la question 26. par
dt C
d § 1 2 · d § 1 q2 ·
¸ = 0 , et avec les
¨ Li ¸ + ¨
dt © 2
¹ dt © 2 C ¹
Li
di q dq
+
=0
dt C dt
soit
d
( Em + Ee ) = 0 .
dt
Ce résultat fait apparaître que l’énergie électromagnétique du circuit est constante au
cours du temps. Au cours des oscillations l’énergie est alternativement balancée de
la forme électrique (dans le condensateur) à la forme magnétique (dans
l’inductance). Un phénomène analogue se produit en mécanique dans l’étude des
d
oscillations non amorties d’une masse accrochée à un ressort :
( Ec + E p ) = 0 .
dt
de P
aris:2
1108
5026
notations de la question 21. :
Univ
ersité
/HGLS{OH5/&
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
29. Pour une valeur très petite de la résistance (cas R1 ), les changements de signe de q
et q indiquent des oscillations. Mais on n’a plus l’oscillateur harmonique du cas LC
(courbe ≠ cercle) et les oscillations ne sont pas périodiques (la courbe n’est pas
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
dq
, il vient
dt
8:88
i=
9123
28. En multipliant les deux membres de l’équation L
fermée). Le point O attracteur de la trajectoire de phase et la diminution de
« l’amplitude » montrent une diminution de l’énergie. Ceci est cohérent avec la
présence du conducteur ohmique dissipant l’énergie électrique par effet Joule.
Quand R augmente (cas R 2 ) l’amortissement est plus rapide : sur la durée
d’observation, le point O est pratiquement atteint.
Pour R3 et R 4 , q ne change pas de signe, il n’y a plus d’oscillations ; q < 0 indique
une fonction q (t ) décroissante.
L’évolution des trajectoires de phase montrent l’existence d’une valeur théorique de
R ( Rc résistance critique) correspondant au passage du régime d’oscillations
amorties au régime sans oscillations (appelé apériodique). Cette valeur, d’après le
graphe, est comprise entre R 2 et R 4 , R3 en est une valeur approchée.
Il est clair que l’amortissement est moins rapide (O non atteint) dans le cas R 4 que
dans le cas R3 .
8:88
9123
20:1
96.6
5.15
5.15
9:16
9252
9890
30. La loi des mailles pour un dipôle RLC série en
di
L
di q
Ri
dt
régime libre est Ri + L + = 0 .
i
dt C
dq
q
R
L
, il
En multipliant les deux membres par i =
q
dt
C
2
C
d §1
· d §1 q ·
vient Ri 2 + ¨ Li 2 ¸ + ¨
¸ = 0 soit
dt © 2
¹ dt © 2 C ¹
d
avec les notations de la question 21. :
( Em + Ee ) = − Ri 2 < 0 .
dt
Ce résultat fait apparaître que la dissipation par effet Joule est responsable de la
diminution de l’énergie totale (magnétique et électrostatique) du circuit ; on dit que
le régime est amorti.
d 2q
dq q
dq
L’équation différentielle s’écrit aussi : L 2 + R
+ = 0 car i =
.
dt
dt
dt C
1
= 0 , que les deux
C
racines sont soit réelles négatives, soit complexes conjuguées à partie réelle négative
(puisque leur produit c / a = 1/ LC > 0 et leur somme −b / a = − R / L < 0 ), ce qui
montre que le régime est amorti dans tous les cas, suite à la présence bien sûr de la
résistance R dissipative.
aris:2
1108
5026
À noter d’abord, pour l’équation caractéristique L r 2 + R r +
de P
La résistance critique pour laquelle Δ = 0 vaut
Rc = 2 L / C
niv.s
chola
rvox.
com:
Univ
ersité
Conformément à la résolution des équations différentielles (chapitre 0), pour R < Rc ,
une faible résistance conduit à un régime pseudopériodique amorti (des oscillations
contenues entre deux exponentielles décroissantes, Δ < 0 ) et pour R > Rc , une forte
résistance conduit à un régime apériodique amorti (par exponentielles décroissantes,
Δ > 0 ).
&KDSLWUH
Comme on l’a vu à la
la question
question 29.,
29., lele régime
régime apériodique
apériodiquecritique
critiqueest
estcelui
celuipour
pour
lequel le retour à l’équilibre
l’équilibre est
est le
le plus
plus rapide
rapide(il
(ilétait
étaitutilisé
utilisédans
dansles
lesappareils
appareilsdede
mesure à cadre mobile).
mobile).
Seule l’absence de résistance
résistance ((RR ==00)) conduit
conduitààdes
desoscillations
oscillationsnon
nonamorties,
amorties,celles
celles
du dipôle LC en régime
régime libre,
libre, de
de pulsation
pulsation::
ωω00 ==11// LC
LC
qq
aux
auxbornes
bornesdu
ducondensateur
condensateurest
est: :
CC
d 2uc ω00 du
ducc
ωω RR
ω0202uucc ==00 avec
+
++ω
avec 0 0 == etet ωω02 02==1/1/LC
LC. .
2
dt
Q dt
dt
QQ LL
31.
31. L’équation de la tension
tension uucc ==
Il s’agit de l’équation différentielle
différentielle étudiée
étudiéeau
auparagraphe
paragrapheII-3.a)
II-3.a)duduchapitre
chapitre0.0.
ω0
2Q
ω
± jjω
−−
ωω00
5.15
−
9:16
9252
9890
Suivant les valeurs de
de Q
Q (inversement
(inversement proportionnel
proportionnelààl’amortissement)
l’amortissement)ononobtient
obtient
les divers régimes observés
observés expérimentalement
expérimentalement: :
11
Δ<0
soit Q > ,, cas
cas d’un
d’un amortissement
amortissement faible,
faible, les
les racines
racinesdedel’équation
l’équation
22
caractéristique
caractéristique sont
sont complexes
complexes conjuguées
conjuguées àà partie
partie réelle
réelle négative
négative: :
11
cos
cos ((ωωtt ++ϕϕ)) avec
avecωω == −Δ
−Δ/ /22==ωω0 0 11−− 2 2
4 4QQ
ce régime libre
libre est
est qualifié
qualifié de
de pseudopériodique
pseudopériodique, ,lalapseudopériode
pseudopériodeestest
2π
T =
. L’étude
L’étude complète
complèteest
estfaite
faiteààlalaquestion
questionsuivante.
suivante.
5.15
tt
20:1
96.6
u c = A ee
22QQ
soit Q <
11
,, cas
cas d’un
d’un amortissement
amortissement fort,
fort, les
les racines
racines dede l’équation
l’équation
22
8:88
Δ>0
9123
ω
ωω
1
,, ilil s’agit
s’agit d’un
d’un cas
cas limite
limite théorique
théorique intermédiaire
intermédiaireentre
entrelele
22
régime pseudopériodique
pseudopériodique etet lele régime
régime apériodique,
apériodique, onon lele qualifie
qualifie
d’apériodique
d’apériodique critique
critique..
de P
soit Q =
Univ
ersité
Δ=0
aris:2
u c = B e −−ββ tt ++ C
C ee−−γγ tt avec
avec ωω0202 == ββ γγ
apériodique. .
ce régime libre
libre est
est qualifié
qualifiéd’
d’apériodique
ωω
5pSRQVHVDX[TXHVWLRQV
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
1108
5026
est négative
négativeetetleur
leur
caractéristique
caractéristique sont
sont réelles,
réelles, leur
leur somme
somme ( (−− 0 0) ) est
QQ
produit ( ω 0202 )) positif,
positif, elles
elles sont
sont négatives,
négatives, on
on les
les note
note −−
β βetet− −γ γ. .
La racine double
double de
de l’équation
l’équation caractéristique
caractéristique est
est −− 0 0 ==−ω
−ω
0 0 etetlala
2Q
2Q
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
solution de l’équation
l’équation différentielle
différentielle uuc c ==( (AtAt++BB) )ee− ω− 0ωt 0.t .
32. Dans le cas du régime pseudopériodique ( Q >
uc = A e
−
ω0
t
−
ω0
−
ω0
2Q
t
cos (ω t + ϕ ) avec ω = ω 0 1 −
−
t
1
), la solution s’écrit :
2
ω0
−
t
1
4 Q2
ω0
t
−Ae
≤ Ae
cos(ωt + ϕ ) ≤ A e
, les courbes ± A e
apparaissent
comme des courbes enveloppes pour u C (t ) .
Les points de contact avec les courbes enveloppes se produisent aux dates t telles
du C
= 0 ) se produisent aux
que cos(ωt + ϕ ) = ±1 , alors que les extrema (définis par
dt
2Q
2Q
2Q
2Q
ω
0
cos (ωt + ϕ ) − ω sin (ωt + ϕ ) = 0 , c’est-à-dire graphiquement
2Q
un peu avant le point de contact avec la courbe enveloppe.
Les zéros de u C (t ) se produisent aux dates t telles que cos(ωt + ϕ ) = 0 .
9890
dates t telles que −
2π
ω
qui apparaît un peu partout sur le graphe de u C (t ) .
5.15
la durée T =
π
. On appelle pseudopériode
ω
9:16
deux points particuliers successifs du même type est
9252
La périodicité des fonctions trigonométriques montre que l’écart temporel entre
Univ
ersité
de P
aris:2
1108
5026
8:88
9123
20:1
96.6
5.15
Avec les conditions initiales : condensateur chargé sous la tension U 0 et i (0 − ) = 0 ,
1 ω0
il vient A = U 0 cos ϕ et tan ϕ = −
.
2Q ω
Le point A est un zéro, B un minimum et D un point de contact.
niv.s
chola
rvox.
com:
L’amplitude maximale décroît de façon exponentielle, en effet deux maximums
consécutifs sont séparés de T et leur rapport, si le premier est atteint à t1 est :
&KDSLWUH
−
An
=
An +1
Ae
−
ω0
A e 2Q
ω0
2Q
( t1 +T )
t1
cos(ω t1 + ϕ )
+
ω0
T
= e 2 Q car ωT = 2π
cos[ω (t1 + T ) + ϕ ]
Le décrément logarithmique δ est le logarithme népérien du rapport de deux
maximums successifs, d’où δ = ln e
ω0
2Q
T
=
ω0
2Q
δ=
T
ω0
2Q
T
Il résulte de la définition de ω , la relation entre la pseudopériode T et la période
§
1 ·
propre T0 : T 2 ¨ 1 −
= T02 T 2 = T02 + T 2 / 4Q 2 .
2 ¸
4
Q
©
¹
d’où avec δ la relation cherchée, dans laquelle δ dépend de T :
T 2 / T02 = 1 + δ 2 / 4π 2
9890
En cas de faible amortissement Q 1 et δ 1 , et donc T ≈ T0 bien que T
9252
légèrement supérieure à T0 , mais l’écart est du second ordre.
ω0
8:88
9123
20:1
96.6
5.15
5.15
9:16
−
t
1
33. Pour Q > , l’amortissement des oscillations est en e 2 Q , la durée du régime libre
2
(ou du régime transitoire en cas de second membre à l’équation différentielle)
diminue si Q diminue.
1
Pour Q < , u c = B e − β t + C e −γ t avec ω 02 = β γ , prenons β < ω 0 et γ > ω 0 ,
2
1
quand t / on a u c ≈ B e − β t qui décroit moins vite que e − ω 0 t ( cas Q = ), donc
2
la durée du régime libre diminue si Q augmente.
Comme le montrait le portrait de phase de la question 29., la durée du régime libre
est plus petite pour le régime apériodique critique.
Univ
ersité
$SSOLFDWLRQVGLUHFWHVGXFRXUV
/HVORLVGHO·pOHFWURFLQpWLTXHHQUpJLPHFRQWLQX
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
35. R1 et R2 ne sont ni en série (elles ne sont pas parcourues par le même courant), ni
en parallèle (elles n’ont pas leurs deux bornes communes).
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
aris:2
di∞
dq
= 0; i∞ = ∞ = 0; E = 0 + 0 + uC ∞ et q∞ = CE
dt
dt
de P
uL ∞ = L
1108
5026
34. Les notations sont celles de la question 30., le régime forcé s’obtient sans passer par
l’équation différentielle de la façon suivante : le générateur de fém constante impose
un second membre constant, donc le régime forcé est continu et toutes les grandeurs
sont constantes en régime forcé, donc :
R1 et R4 ne sont ni en série, ni en parallèle.
R2 et R3 sont en parallèle : leur résistance équivalente est RP =
R2 R3
.
R2 + R3
R3 et R4 ne sont ni en série, ni en parallèle.
R3 et R5 ne sont ni en série, ni en parallèle.
R4 et R5 sont en série (la situation n’est pas la même que pour R1 et R2 ) ; leur
résistance équivalente est RS = R4 + R5 .
On peut alors redessiner le réseau dipolaire précédent
sous
la
forme
ci-contre
(l’emplacement
« topologique » de RS à l’ancienne place de R4 ou à
R1
A
RP
l’ancienne place de R5 est sans importance) ; il
RS
B
apparaît alors que R1 est en série avec l’association
9252
9890
RP & RS , d’où la résistance équivalente RAB du dipôle :
R R
R2 R3 ( R4 + R5 )
RAB = R1 + P S = R1 +
RP + RS
R2 R3 + ( R2 + R3 )( R4 + R5 )
5.15
5.15
9:16
36. Déterminer d’abord la résistance équivalente au réseau dipolaire résistif à droite de
AB. En commençant par les deux résistances, à droite, en série, de résistance
équivalente R + R = 2 R , association en parallèle avec la résistance 2R , ce qui
donne R. Cette résistance équivalente R est en série avec 2R et R : soit R AB = 4 R .
e
e
20:1
u1
R
1108
2R
2
R
e
= e et u1 = + e
=
2R + R 3
R + 2R 3
2R
u
e
=− 2 =−
2R + R + R
2
3
R
e
u4 = u2
=
4R 6
e
de plus u ′ = u 4 =
6
u 3 = −u 2
Univ
ersité
e
rvox.
com:
u1
niv.s
chola
u3
aris:2
Ensuite réintégrer progressivement les
branches remplacées par leur équivalent
pour retrouver les tensions demandées.
A
de P
Un diviseur de tension donne : u 2 = e
B
5026
B
9123
R
u2
2R
8:88
u1
⇔
u 2 4R
4R
A
96.6
A
2R
u2
4R
R
u′
R
R
B
u4
&KDSLWUH
On en déduit u 5 =
u′
e
=
2 12
37. Utiliser les diviseurs :
R
e
=
a) u = e
2R 2
R
e
=−
b) u = −e
4R
4
R/2 e
R
R
= ;
en série avec R et , u = u1 = e
2R
4
2
2
se rappeler que seules comptent les liaisons entre les dipôles et pas la forme des
fils !
c) Remplacer R & R par
d) C’est le même circuit que le c).
i
1 / 3R
= 0 ou plus rapidement dans le cas de deux résistances
1 / 3R + 1 / R
4
i
R
= 0
seulement en parallèle i = i 0
3R + R
4
9252
9890
e) i = i 0
5.15
9:16
f) La résistance équivalente de la branche centrale est 2R donc
2i
i
2R
2
1
i = −i 0
= − 0 ; u = R i = − R i 0 ; i1 = (i + i 0 ) = 0
2R + R
3
3
2
6
R
D
C
39. Écrire par exemple: v0 − v1 = R1 (i0 + i1 ) (1) et v0 − R1i0 = R 2 (i0 − i1 ) (2) ;
niv.s
chola
5pJLPHVFRQWLQXHWWUDQVLWRLUH
rvox.
com:
(2) donne directement i1 ; reporté dans (1), on a v1 d’où le résultat :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
de P
e1 − 2 e 2
4 e1 − e 2
; i1 =
7R
7R
e2
Univ
ersité
i2 =
aris:2
2 × (2) + (1) donne i 2 , on remplace dans (1) e
1
ce qui donne i1 :
1108
5026
8:88
9123
20:1
96.6
5.15
38. Les deux intensités données suffisent pour orienter toutes les branches, comme
indiqué sur le schéma ci-après.
Il faut deux équations indépendantes, elles sont fournies par la loi des mailles.
L’indépendance des équations de maille est assurée en choisissant des mailles telles
que chaque maille choisie possède au moins une branche n’appartenant qu’à elle.
Maille ADA : R (i1 − i 2 ) − e1 + R i1 = 0
i1 A i 2
Maille ABCDA :
B
R i 2 + R i 2 + e 2 + R i 2 − R (i1 − i 2 ) = 0
R
i1 − i 2
R
(1)
­ 2 R i1 − R i 2 = e1
R
®
−
+
=
−
R
i
R
i
e
4
(2)
1
2
2
¯
R
i1 = −
et
§
R ·
1
v0 + ¨ 1 + 1 ¸ i0
¨
R2
R 2 ¹¸
©
40. On oriente :
I1
­U = e − R I 1
e −U U
°
I =
−
soit
®U = − R I 2
R
R
°I = I + I
1
2
¯
e
:196
.65.1
e
R
et résistance interne
2
2
I
pente −
2320
Sa caractéristique est :
55.1
le réseau dipolaire est équivalent
à une source de Thévenin de fém
U
59:1
R
2
R
8891
e R
− I
2 2
I2
R
582:
U =
I
6925
3002
4
§
§
R ·
R ·
v1 = ¨ 1 + 1 ¸ v0 − R1 ¨ 2 + 1 ¸ i0
¨
¨
R 2 ¹¸
R 2 ¹¸
©
©
U
0753
e 2
iques
:211
'LS{OHVQRQOLQpDLUHV
ue e
t des
Micro
techn
41. La caractéristique montre un dipôle non symétrique (le sens du branchement est
déterminant lors de son utilisation). Le symbole représentatif est lui-même non
symétrique. Le dipôle est non linéaire, même si la caractéristique du modèle diode
idéale est linéarisée par morceaux. Le dipôle est passif : sa caractéristique statique
passe par O. Le fonctionnement est :
i = 0 tant que u < 0 (sens dit bloqué)
u = 0 tant que i ≥ 0 (sens dit passant)
I
pente −
i
ure d
e Mé
caniq
42. On retrouve la diode aux bornes du réseau dipolaire
étudié à la question 40., le point de fonctionnement est
l’intersection des caractéristique tracées pour les
mêmes U et I.
2e e
=
Il vient u = 0 et i =
R2 R
On déduit de u = R i1 : i1 = 0
2
R
U
u
e 2
e Na
Écol
tiona
le Su
périe
Autre méthode possible, par le calcul car la caractéristique de l’élément non linéaire
est linéarisée par morceaux.
Les équations du circuit proposé sont :
&KDSLWUH
­ u = R i1
°
® e = R (i + i1 ) + R i1
e
° caractéristique i (u ) de la diode
¯
soit 3 inconnues ( i, i1 et u ) et 3 équations dont une
non linéaire.
u
i =
et
6925
3002
4
i + i1
e
R
55.1
.65.1
2320
43. Les équations du circuit proposé sont :
­ v = U sin ω t − R i
°
®v = E + u
° caractéristique i (u ) de la diode
¯
soit 3 inconnues ( i, v et u ) et 3 équations dont une non linéaire.
59:1
i > 0 , ce qui valide l’hypothèse.
:196
Avec les valeurs numériques e > 0
R
i1 = 0
L’hypothèse diode passante, u = 0 , conduit à
i
i1
R
8891
Ź L’hypothèse diode passante, u = 0 , conduit à v = E et R i = U sin ω t − E ;
la validité de l’hypothèse i ≥ 0 correspond à U sin ω t ≥ E .
0753
582:
Ź L’hypothèse diode bloquée, i = 0 , conduit à v = U sin ω t et
u = U sin ω t − E ; la validité de l’hypothèse u < 0 correspond à U sin ω t < E .
:211
e (t)
t
techn
iques
E
Micro
v (t)
i
i
u
e Mé
caniq
44. La caractéristique linéarisée de la diode est donnée cicontre.
i = 0 tant que u < V S
u = V S tant que i ≥ 0
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
diode est passante et vs (t ) = ve (t ) − Vs
(l’effet de seuil s’atténue lorsque
V0 VS ).
ve (t )
u
vs ( t )
VS
périe
bloquée et vs (t ) = 0 . Pour ve (t ) ≥ VS , la
ure d
On a un redressement monoalternance
avec seuil. Pour ve (t ) < VS , la diode est
VS
O
t
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Toutes les valeurs supérieures à E sont coupées, Le montage est un écrêteur.
5pJLPHVOLEUHVHWUpSRQVHVjXQpFKHORQGHWHQVLRQ
:196
.65.1
55.1
59:1
6925
3002
4
45. Au début (à la fermeture de l’interrupteur) l’intensité est nulle, la différence de
potentiel aux bornes de la résistance est donc nulle ( u R = Ri ) et la variation de i (t ) ,
di
, est donc maximale. Au fur et à mesure que le courant s’installe, la différence de
dt
potentiel aux bornes de la résistance croît et donc celle aux bornes de l’inductance
décroît, l’intensité augmente alors avec une pente plus douce. Le phénomène
s’arrête lorsque u = 0 et donc i0 = E / R . On lit sur le graphe i 0 = 10 mA . Quand i
ne varie plus, u R = 0 , la trajectoire de phase donne E = R i 0 = 5 V et donc
5
R = −2 = 500 Ω .
10
L’allure de la trajectoire de phase permet d’écrire : u R = a − b u R , soit un système
1
d’ordre 1 : y + y = c . La mesure de b nous fournit donc la constante de temps τ .
25.10 3
= 5.10 3 s −1 et on obtient : τ = 2.10 −4 s = 0,2 ms . On déduit L de
5
8891
On lit b =
2320
τ
L
L = 0,1 H .
R
La constante c de l’équation différentielle vaut 25 V.ms −1 , qui correspond bien à
E
5
=
= 25 V.ms −1 .
0, 2
τ
On peut également lire sur le graphe i (t ) , la valeur de τ pour i = 0, 63 i 0 ou avec
:211
0753
582:
τ =
iques
l’intersection de la tangente à l’origine et la direction asymptotique ( i = i 0 ). Les
techn
deux redonnent τ = 0, 2 ms , ce qui confirme la variation en 1 − e − t /τ et le système
du premier ordre.
ue e
t des
Micro
Le régime transitoire dure quelques τ ; pour t = 5 τ = 1 ms par exemple, on a
quasiment le régime forcé i 0 = E / R .
46. * Après un régime transitoire dû à la présence de l’inductance propre de la bobine,
on observe un régime forcé continu dont l’intensité du courant est donnée par :
e0
R
AN : i ∞ ≈ 13 A
caniq
i∞ =
e Mé
intensité élevée vu la faiblesse de R .
e Na
Écol
tiona
le Su
périe
ure d
* La bobine de résistance R et d’inductance L associée avec la source de fém e0
obéit, après la mise sous tension (fermeture de l’interrupteur), à l’équation
différentielle en i (t ) (loi des mailles) : voir réseau question 45.
L
di
di
e
e0 = R i + L
soit τ + i = 0 = i ∞ avec τ =
R
dt
dt
R
&KDSLWUH
C’est une équation différentielle du premier ordre à coefficients constants avec
second membre non nul.
La solution de l’équation sans second membre est A exp( −t / τ ) ; on y ajoute une
solution particulière de l’équation avec second membre soit ici la constante i ∞ .
47. Les lois de l’électrocinétique s’écrivent :
I 0 = i1 + i 2 =
:196
2320
C
3 inconnues ( i1 , i 2 et v ) et 3 équations
8891
v (t )
582:
R0
­
° I 0 = i1 + i 2
°
® v = R0 i1
°
dv
° i2 = C
dt
¯
i2
i1
v
dv
+C
R0
dt
dv
v
I
+
= 0
dt R 0C C
0753
I0
55.1
.65.1
AN : τ = 0, 91 ms , soit une durée du régime transitoire de qq ms.
59:1
i (t ) = i 1∞ (1 − exp( −t / τ ))
La solution générale est donc :
6925
3002
4
La solution générale s’écrit donc i (t ) = A exp( −t / τ ) + i ∞ .
Par continuité de l’intensité du courant dans la bobine, il faut traduire
i (0 + ) = i (0 − ) = 0 soit A = − i ∞
techn
condensateur est chargé et tout le courant passe par R 0
iques
:211
C’est une équation différentielle du premier ordre, linéaire, à coefficients constants
et avec second membre constant non nul.
Solution particulière : v p = cste = R0 I 0 , c’est aussi le régime forcé continu, le
Solution générale : v (t ) = K e
−
t
R 0C
t
R 0C
Micro
Solution générale de l’équation sans second membre : K e
−
+ R0I0 ,
caniq
Quand R 0 → ∞ (source de courant idéale), v (t ) ≈ R 0 I 0 (
t
I t
) ≈ 0 , et donc la
R 0C
C
dv
dt
v(t ) ≈
I0 t
C
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
I 0 ≈ i2 = C
ure d
R 0 → ∞ redonne directement sur le schéma :
périe
Rq :
e Mé
tension v (t ) aux bornes du condensateur est une fonction linéaire du temps appelée
rampe.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
avec la condition initiale : v(0 ) = v(0 − ) = 0 (condensateur non chargé)
K = −R0 I0
ue e
t des
+
8891
2320
:196
.65.1
55.1
59:1
6925
3002
4
48. Les équations du circuit proposé sont :
­
° E = R i1 + u
(1)
°
° di 2
(2)
= R i1
soit 3 inconnues ( i1 , i 2 et u ) et 3 équations
®L
° dt
du
°
(3)
°̄ i1 + i 2 = C dt
a) i 2 et u sont continues : i 2 (0 + ) = i 2 (0 − ) = 0 et u (0 + ) = u (0 − ) = 0
E
(1) R i1 (0 + ) = E − u (0 + ) = E i1 (0 + ) =
R
du
du
E
(0 + )
(0 + ) =
(3) i1 (0 + ) + 0 = C
dt
dt
RC
b) Pour t → ∞ , il s’établit un régime forcé continu : i1 , i 2 , u et du / dt sont des
constantes.
§ du ·
u ∞ = cste ¨
¸ = 0 ; (2) avec i 2 ∞ = cste i1 ∞ = 0 ; (3) donne alors
© dt ¹ ∞
i 2 ∞ = 0 ; (1) u ∞ = E − R i1 ∞ = E
R′
582:
i′
49. a) Les orientations choisies sur le schéma
ci-contre conduisent à :
dq′
dq
i′ = −
et i = +
dt
dt
du ′
(1)
Avec q′ = C ′u ′ i′ = − C ′
dt
du
(2)
et q = Cu i = C
dt
Les lois de Kirchhoff donnent :
q i
u
R
C
techn
iques
:211
u′
C′
0753
q′
Micro
u ′ = R′i′ + u (3) et u = R (i′ − i ) (4)
périe
ure d
e Mé
caniq
ue e
t des
On a ainsi 4 équations aux 4 inconnues u , u ′ , i et i′ ; de cet ensemble de
relations différentielles, il faut éliminer les variables en ne gardant que u .
du ′
+ u (3’)
(1) et (3) donnent : u ′ = − R′C ′
dt
du ′
du ·
§
(1), (2) et (4) donnent : u = R ¨ − C ′
−C
¸ (4’)
dt
dt ¹
©
du ′
(3′) (4′)
u′ u u
du
Pour éliminer
, on calcule
−
:
− = +C
(5)
dt
R′
R
R′ R R′
dt
du ′
par (4’) ; il vient alors :
Et enfin, on dérive (5) et on y élimine
dt
e Na
Écol
tiona
le Su
d 2u § 1
1
1 · du
1
+¨
+
+
u=0
¸ +
2
′
′
′
dt
© RC R C R C ¹ dt RCR′C ′
&KDSLWUH
Il s’agit d’une équation différentielle du 2nd ordre, linéaire, homogène (régime
libre), à coefficients constants, et qui admet a priori tout type de solution…
2320
:196
.65.1
55.1
59:1
6925
3002
4
b) Les circuits électriques oscillants passifs sont nécessairement constitués d’un
condensateur et d’une inductance ; or cette dernière est absente du réseau proposé
(et ne peut être simulée par un réseau RC passif). D’où l’impossibilité d’obtenir
des oscillations avec un réseau constitué seulement de condensateurs et de
résistances.
Confirmons ce résultat par un calcul, le type de solution, pseudopériodique
( Δ < 0 ) ou apériodique ( Δ > 0 ), étant déterminé par le signe du discriminant de
l’équation caractéristique :
2
2
1
1 ·
4
1
1 ·
4
§ 1
§ 1
Δ=¨
+
+
−
=
+
−
+ 2
>0
¸
¨
¸
© RC R′C R′C ′ ¹ RCR′C ′ © RC R′C R′C ′ ¹ R′ CC ′
ce qui confirme l’impossibilité d’obtenir un régime pseudopériodique ou
apériodique critique.
8891
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
iques
:211
0753
582:
50. À température ordinaire, la vitesse d’agitation thermique est de l’ordre de 10 6 m.s −1 ,
mais ces mouvements sont désordonnés et le vecteur vitesse moyen, sur l’ensemble
des porteurs à un instant, est nul. Pour un métal la vitesse d’ensemble des électrons
de conduction, correspondant à un courant électrique (fil parcouru par un courant de
1 A), est de l’ordre de 0,1mm.s −1 ! Ces deux vitesses ne doivent pas être confondues avec la vitesse d’établissement par exemple d’un courant, qui est la vitesse de
propagation de l’information soit c = 3.10 8 m.s −1 (voir l’ARQS question 3.).
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
52. Supposer que le dipôle est soumis à une tension u AB , calculer i AB et en déduire
u
R = AB . Essayer aussi de simplifier les associations en utilisant les symétries
i AB
éventuelles.
Exemple : dans le réseau dipolaire résistif
C
ci-contre, il n’y a aucune association simple
de résistances.
R1
R
B
A i AB
Le plan contenant AB et auquel CD est
R2
perpendiculaire est un plan de symétrie,
R
R1
donc VC = V D et l’intensité dans R 2 est
D
nulle quelle que soit u AB , on peut enlever
u AB
R 2 . Le réseau dipolaire simplifié donne
Réq = ( R1 + R ) / 2 . On pouvait aussi réunir les points C et D et obtenir le même
résultat.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
techn
51. Oui, il suffit d’une relation u AB = R i AB avec R constante (indépendante de i AB )
positive.
54. Pour une source de tension u BA = e − R i AB
La puissance reçue P = u AB i AB devient donc
i
ici en convention générateur : P = −u i .
A
Pour P > 0 le fonctionnement de la source de
6925
3002
4
53. En parallèle pour éviter qu’elles ne cessent toutes de briller lorsque l’une d’entre
elles est grillée. Par ailleurs, pour une tension donnée, cela n’oblige alors pas à
limiter leur nombre.
Ri
e
R
B
8891
2320
:196
.65.1
55.1
59:1
u
tension est récepteur. Les modes de
i
fonctionnement sont indiqués sur la
caractéristique.
générateur
i0
Les piles rechargeables fonctionnent ainsi,
en générateur dans l’appareil qu’elles
alimentent, et en récepteur lorsqu’on les récepteur
u
e
recharge.
Ceci montre bien qu’il ne faut pas
confondre source de tension et « générateur ».
Attention certaines sources de tension n’acceptent pas de fonctionner en récepteur.
iques
:211
0753
582:
55. Ce qui compte pour une batterie c’est la charge totale qu’elle est capable de délivrer
et plus concrètement la durée sur laquelle elle est capable de débiter une intensité
donnée ; l’unité en (m)A.h étant plus parlante qu’en (m)C. En multipliant cette
« capacité » par la tension nominale de la batterie, on a le travail électrique que peut
fournir cette batterie.
Micro
techn
56. Plus l’intensité demandée est élevée, plus la résistance du conducteur doit être faible
pour maintenir à un niveau insignifiant son échauffement par effet Joule dans le fil
d’alimentation. Or la résistance des fils diminue lorsque leur section augmente (elle
est inversement proportionnelle à sa section, voir la question 13.) et donc à intensité
constante, un gros fil s’échauffe moins qu’un fil mince.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
57. Pour éviter une trop forte intensité dans un circuit ou dans un appareil (ce qui
pourrait l’endommager), on place en entrée un fusible, constitué d’un fil conducteur
qui fond rapidement lorsque l’intensité qui le traverse dépasse une valeur
déterminée, souvent importante.
Les appareils électroménagers sont reliés à la terre par une liaison très conductrice
établie entre la carcasse métallique de l’appareil et le sol. Si un fil d’alimentation
touche de façon accidentelle la carcasse de l’appareil, un circuit peut s’établir entre
ce fil et la terre (sans passer par le corps de la personne qui touche l’appareil…).
Avec le même contact accidentel, en cas de liaison à la terre défectueuse, une
personne en contact avec la carcasse métallique sera soumise à la tension du réseau
via la terre (chaussures non isolantes). Dans ce cas une partie du courant qui entre
dans l’installation ne ressort pas par le chemin normal ; ce courant de fuite est
détecté par un disjoncteur différentiel qui coupe l’alimentation et évite
l’électrocution.
&KDSLWUH
58. Ils ne sont en contact qu’avec un seul fil a priori ddp nulle et l’écart entre les
pattes est insuffisant, compte-tenu de la très faible résistance du câble, pour créer
une tension dangereuse.
b) Entre une main et les pieds : Req = R1 +
R3 ( R 2 + R3 )
2 R3 + R 2
6925
3002
4
59. a) Les liquides présents dans l’estomac ou les intestins sont plus conducteurs que les
muscles ou les os des membres R 4 plus faible.
U
R5
et I =
Req
2
+ R4 +
A.N. Req = 966 Ω et I = 2, 4.10 mA , le disjoncteur coupe l’alimentation.
2 R3 R 2
U
et I =
2 R3 + R 2
Req
55.1
c) Entre les deux mains : Req = 2 R1 +
59:1
2
:196
.65.1
A.N. Req = 981 Ω et I = 2,3.10 2 mA , le fusible ne fondra pas alors que
l’intensité du courant dépasse largement la valeur mortelle.
2320
d) La tension conduisant à un courant maximal de 20 mA dans le corps humain
d’environ 1 kΩ est d’environ 20 V (valeur réglementaire 24 V).
iques
:211
0753
582:
8891
60. a) À t = 0 , les condensateurs sont déchargés et le circuit est mis sous tension
(interrupteur K 1 fermé) ; la résistance en série avec les condensateurs étant
considérée comme nulle, la constante de temps est nulle et la charge des
condensateurs instantanée. Le régime forcé continu est établi : i1 = i2 = 0 car q1
dq1 dq 2
et q 2 sont constantes, de plus
=
q1 = q 2 + cste , soit avec les
dt
dt
conditions initiales et la continuité des charges : q1 = q2 = q (qui s’interprète
aussi sous la forme − q1 + q2 = 0 , l’armature droite de C1 et l’armature gauche de
q=
2C1C2
E
C1 + C2
Micro
§ 1
q1
q
1 ·
+ 2 =q¨
+
¸ d’où
C1 C 2
© C1 C 2 ¹
ue e
t des
L’équation de maille donne : 2 E =
techn
C2 forment un système isolé de charge initiale nulle).
ure d
e Mé
caniq
grand devant ces constantes, le régime forcé continu est établi : i1 = 0 et i 2 = 0 ,
donc la différence de potentiel aux bornes de la résistance est nulle, d’où
q1′ = C1 E et q2′ = C2 E conformément aux équations de maille.
La charge Q ayant traversé la résistance R est la somme des variations de
charges de l’armature droite de C1 et de l’armature gauche de C2 :
périe
Q = (− q1′ + q ) + (q2′ − q ) soit
Q = (C2 − C1 ) E
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
Rq : Si C1 = C2 : q1′ = q2′ = q et Q = 0 ; la fermeture de l’interrupteur ne
provoque aucun transfert de charges.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
b) Les constantes de temps sont maintenant R C1 et R C 2 , au bout d’un temps
([HUFLFHV
R r12 2
iE
(r1 + R )2
59:1
PR =
6925
3002
4
61. Rendement d’un montage potentiométrique
La puissance absorbée par la résistance de charge est PR = R iR2 ; l’intensité iR dans
r
la résistance R est donné par iR = 1 iE (diviseur d’intensité) où iE est l’intensité
r1 + R
dans la branche du générateur, orientation dans le même sens que iR , d’où :
η=
PR
Rr12
=
PE ( r1 + R ) [ r2 ( r1 + R ) + r1R ]
8891
d’où le rendement
2320
:196
.65.1
55.1
§
rR ·
La puissance délivrée par la source idéale est PE = E iE avec E = ¨ r2 + 1 ¸ iE
r1 + R ¹
©
soit :
§
rR ·
PE = ¨ r2 + 1 ¸ iE2
r1 + R ¹
©
582:
AN : η = 0, 20
0753
Ce rendement est faible, 80 % de l’énergie est reçue et dissipée par les résistances r1
:211
et r2 .
I
TGV
E
L’intensité
dans
la
motrice
est
donc
I = I 1 + I 2 . Avec l’équation de maille :
I2 = I
périe
x
d
tiona
d −x
d
e Na
I1 = I
Écol
d’où
I1 = I 2
le Su
− E + λ x I 1 − λ (d − x) I 2 + E = 0
caniq
λx
I2
0
λd
λ (d − x)
I2
0
U
E
E
e Mé
λ (d − x) et I 1 dans λ x .
I1
ure d
b) Aux
bornes
de
λ d (section 2) la tension
est nulle intensité I 1
I 2 dans
nulle
ue e
t des
Micro
techn
iques
62. Alimentation électrique du TGV
d
R ρ
a) R = ρ
et λ =
=
d
s
s
AN : λ = 1, 2.10 −4 Ω.m −1 = 1, 2.10 −1 Ω.km −1 et R = 7, 0 Ω valeur faible due à
une section importante.
i (t ) sinusoïdale sera la même en tout point dans le cadre de l’ARQS, à 50 Hz il
faut d 6 000 km (voir la question 3.).
d−x
= I − I2
x
U = E − λ x I1 = E −
λ x (d − x)
d
I
&KDSLWUH
La puissance reçue (et dissipée) par la caténaire est :
d 2
d
−
dU dx
E
RI
< E
4
U ( xm ) = E −
.65.1
d
,
2
+
0
E
U
dP λ I 2
d
=
(d − 2 x) P est maximale pour x m =
et
2
dx
d
λI2 d2 RI2
=
Pm =
4
d 4
2320
:196
de même
0
x
U est minimale pour x m =
x (d − x)
d
59:1
dU
λI
=−
( d − 2 x)
dx
d
P = λI2
55.1
c)
6925
3002
4
P = λ x I 12 + λ (d − x) I 22
8891
A.N. : U min = 24.10 3 V légèrement inférieure à E = 25 kV
Pm = 630 kW
d) U f (d 2) = E −
E − RI 8
E − RI 6
E − RI 4
2d − 3 x − 3 x = 0 ,
soit x fm =
d
3
U f min = E −
RI
6
Uf
U
x
d 3
ue e
t des
le feeder diminue la chute de
tension entre deux sous-stations.
iques
E
techn
Uf
Micro
de
a
R1
d
R2 Rde
b
e
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
ure d
e Mé
caniq
63. Modélisation d’une fibre nerveuse (*)
a) Notons Rde la résistance de la partie à droite de ( de ), dont
l’existence est admise. Cette résistance (entre d et e ) est
donc placée en parallèle sur la résistance R2 de la
première cellule. L’ensemble R2 & Rde étant en série avec
R1 , la résistance entre a et b vaut :
Rab = R1 + R2 & Rde
d 2
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
RI
; le minimum
8
est
atteint
pour
:211
0753
582:
dissipée par effet Joule alors que la motrice reçoit
UI = 14, 4 MW
Une valeur de d pas trop grande, diminue la baisse de tension et limite les pertes,
car R est proportionnel à d.
La résistance totale RT tendant vers une limite, on a, puisque le nombre de
cellules est important : RT = Rab ≈ Rde
R2 RT
soit RT2 − R1 RT − R1 R2 = 0
R2 + RT
Cette équation du second degré n’admet qu’une seule solution positive :
(
1
R1 + R12 + 4 R1R2
2
)
59:1
RT =
6925
3002
4
La valeur limite vérifie donc RT = R1 +
b) On reconnaît un diviseur de tension, la tension Vde aux bornes de R2 & RT est une
Après n cellules élémentaires :
Vn =
§ 1
1 ·
+
¸
© R2 RT ¹
β = R1 ¨
avec
2320
V0
1+ β
8891
Vde =
V0
(1 + β )n
582:
On a donc bien Vde du type
:196
.65.1
55.1
fraction de la tension Vab = V0 aux bornes de R1 + R2 & RT , d’où le résultat :
R2 & RT
1
Vde =
Vab =
V0
R
R1 + R2 & RT
1
+1
R2 & RT
Micro
64. Pont de Wheatstone
a) Rd n’est pas infinie, à l’équilibre V A − V B = 0 .
techn
iques
:211
0753
AN : On calcule d’abord RT = 19,8 MΩ ; β = 1,8.10−2 ; n = 200
V
1
= 2,8 % ; le signal s’est donc atténué de 97 % !
Alors 200 ≈
V0
35
Seul un axone myélinisé peut transmettre une information sur une distance
de l’ordre du mètre.
ue e
t des
b) Le pont étant équilibré, i1 = 0 donc les résistances R1 et R2 sont en série, ainsi
caniq
que R3 et R 4 . Par divisions de tension il vient :
R1
R4
VC − V A = e
et VC − V B = e
R1 + R2
R3 + R 4
e Mé
soit avec V A = V B et e ≠ 0 : R1 R3 = R2 R 4
ure d
Cette condition est suffisante car e ≠ 0 , R1 + R2 ≠ 0 et R3 + R4 ≠ 0
e Na
Écol
tiona
le Su
périe
c) Si on cherche R1 , on impose R4 R3 et on règle R2 pour annuler le courant dans
le détecteur. Il s’agit d’une mesure relative, la précision dépend de la sensibilité
du détecteur de courant. Cette méthode était utilisée avant l’avènement des
appareils numériques.
&KDSLWUH
65. Décharge et recharge d’un condensateur
Pour t < 0 , K étant ouvert pendant une durée grande devant R1C , un régime
6925
3002
4
continu est établi : i (0 − ) = 0 = iC (0 − ) et u (0 − ) = E ; K ouvert i R (0 − ) = 0
0753
582:
8891
2320
:196
.65.1
55.1
59:1
1ère phase. ( t > 0 ), les équations, loi des mailles, loi des nœuds et relation entre
variables, sont :
­ u = E − R1 i (1)
°u = R i
(2)
2 R
°°
soit 4 équations pour 4 inconnues
® i = i R + iC
(3)
°
° i = C du
(4)
°̄ C
dt
La continuité de u donne : u (0 + ) = u (0 − ) = E
E
E
; (3) iC (0 + ) = −
(1) i (0 + ) = 0 ; (2) i R (0 + ) =
R2
R2
Au bout d’un temps suffisant, un nouveau régime continu s’établit :
E
u ∞ = cste iC ∞ = 0 i ∞ = i R ∞ avec (1) et (2) i ∞ =
et
R1 + R2
R2
u∞ =
E
R1 + R 2
Micro
techn
iques
:211
L’équation différentielle, par exemple en u, s’obtient en éliminant toutes les
inconnues autres que u.
du
(1) donne i en fonction de u, (2) i R en fonction de u, (4) iC en fonction de
, on
dt
remplace ensuite dans (3) :
RR
R1 R2 C du
R2
+u =
E et τ = 1 2 C
R
R1 + R2 dt
R1 + R2
1 + R2
caniq
ue e
t des
Rq : Dans l’expression de τ apparaît la résistance R1 & R2 ; ceci peut se voir (sans
calcul) en remplaçant dans le schéma initial le générateur de Thévenin par un
générateur de Norton, alors R2 vient en parallèle sur R1 et l’on revient à une
représentation de Thévenin.
e Mé
2ème phase. À la réouverture de K, on a la réponse à un échelon de tension d’un
dipôle RC série.
ure d
Dans ce cas la constante de temps τ ′ est entièrement imposée par R1 , soit
périe
τ ′ = R1C
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
Le rapport des constantes de temps élimine C :
τ ′ R1 + R2
=
τ
R2
R1 τ ′
= −1
R2 τ
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Pour une durée grande devant τ , on retrouve la valeur u = cste = u ∞
AN : R1 / R2 = 4, 0 , avec les valeurs proposées les résistances sont du même ordre de
grandeur.
6925
3002
4
66. Un autre aspect de la linéarité (*)
a) Se référer au calcul et au graphe de la question 25. avec u (0 + ) = u (0 − ) = 0 :
b) À partir de t = T l’évolution est celle u
d’un dipôle RC en régime libre :
du
τ
+ u = 0 avec comme conditions E
dt
initiales :
u (T + ) = u (T − ) = E ( 1 − e − T τ )
u (t ) = E ( e
T τ
) , soit :
− 1) e
55.1
.65.1
2320
et
−t τ
8891
= E (1 − e
−T τ
graphe 1
T
t
τ
582:
λe
−T τ
τ
:196
u (t ) = λ e − t / τ
La solution est
59:1
u (t ) = E ( 1 − e − t τ ) et τ = R C
0753
(voir le graphe 1 ci-contre)
iques
:211
c) Seule la première phase de 0 à T est modifiée. Quand T décroît, la diminution de
u (T ) , visible sur le graphe 1, est compensée par l’augmentation de E. De plus la
croissance devient linéaire car pour T τ , u(t) s’identifie à la tangente à
l’origine du graphe 1.
t
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
d) Le graphe 3 montre que la réponse u (t )
u e (t )
correspond alors à la dérivée de la réponse
E
indicielle du a).
Il s’agit de la réponse à un signal u e (t ) ,
représenté ci-contre et qui n’est plus un échelon
de tension, mais qui tend vers une impulsion,
représentant par ailleurs la dérivée de l’échelon
de tension.
T
Finalement :
&KDSLWUH
u e (t )
u e (t )
T →0
E → +∞
6925
3002
4
E
dérivée
t
T
t
réponse
59:1
réponse
indicielle
55.1
impulsionnelle
.65.1
u (t )
u (t )
2320
:196
dérivée
t
582:
8891
t
:211
0753
On voit que la réponse à la dérivée est la dérivée de la réponse, ce qui illustre la
linéarité du système.
e Mé
i1 (0 + ) = i1 (0 − ) = 0
E
E
; (4) i 2 (0 + ) =
R
R
Au bout d’un temps suffisant (durée grande devant les diverses constantes de
L L
et 2π LC ), un régime continu s’établit :
temps possibles : rC , RC , ,
R r
u ∞ = cste i 2 ∞ = 0 ; i1∞ = cste u ∞ = 0 i3∞ = 0
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
ure d
(2) i3 (0 + ) = 0 ; (1) i (0 + ) =
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
Micro
techn
iques
67. Réponse à un échelon de tension d’un dipôle RLC parallèle
Les équations données par loi des mailles, loi des nœuds et relation entre variables,
sont :
­
° E = R i + r i3 (1)
°
(2)
° u = r i3
°°
di1
(3)
soit 5 équations pour 5 inconnues : i, i1 , i 2 , i3 , u
®u = L
dt
°
° i = i1 + i 2 + i3 (4)
°
° i 2 = C du
(5)
°̄
dt
et celle de i1 :
a) La continuité de u donne : u (0 + ) = u (0 − ) = 0
(1) puis (4) i ∞ =
E
= i1∞
R
6925
3002
4
b) Le plan de calcul est : remplacer i dans (1) avec (4), dériver l’équation obtenue et
di
remplacer alors i 2 avec (5) en fonction de u et 1 avec (3) en fonction de u,
dt
remplacer alors u en fonction de i3 avec (2). L’équation est :
59:1
d 2i3 R + r di3
d 2i3 ω 0 di3
1
+
+
=
ou
i
0
+
+ ω 02 i3 = 0
3
dt 2
RrC dt
LC
dt 2
Q dt
2320
ω0
:196
L
.
C
2Rr
>
R+r
−
.65.1
55.1
c) L’écriture est normalisée, le discriminant de l’équation caractéristique est
§ 1
·
1
4ω 02 ¨
− 1 ¸ , le régime est pseudopériodique si Q > , soit :
2
2
©4Q
¹
t
1
4Q 2
582:
8891
La solution est alors : i3 (t ) = A e 2Q cos ( ω t + ϕ ) avec ω = ω 0 1 −
e(t )
K
i
R
v(t )
C
Micro
techn
soit 3 équations dont une non linéaire et 3
inconnues.
u
iques
:211
0753
68. Détecteur de crêtes
Les équations sont :
­e = u + v
°
v
dv
°
® i = i R + iC = + C
R
dt
°
°̄ i (u ) de la diode
ure d
e Mé
caniq
ue e
t des
a) L’hypothèse diode passante : u = 0 et i ≥ 0 , conduit à v = e et
v
dv E
i = +C
= sin ω t + CEω cos ω t , la condition diode passante est donc
R
dt
R
T
et jusqu’à t1 tel
vérifiée tant que le sinus et le cosinus sont positifs, soit de 0 à
4
T
car RCω 1 .
que tan ω t1 = − RCω . La date t1 est proche de
4
L’hypothèse diode bloquée : i = 0 et u < 0 conduit à l’équation d’évolution du
dipôle RC en régime libre, soit :
périe
v(t ) = v1 e − (t − t1 ) RC
e Na
Écol
tiona
le Su
et avec u = e − v , la condition de validité est e < v .
&KDSLWUH
v1
v
6925
3002
4
T t1
4
t
T
59:1
e
t
, il faut e − t RC < e
ω0
2Q
t
2Q
=
ω0
2Q
soit RC <
ω0
Q T0
. La condition est :
π
582:
8891
T RC <
−
:196
ω0
2Q
2320
−
enveloppes en e
.65.1
55.1
b) Pour des oscillations amorties en régime pseudopériodique, il faut RC T avec
T la pseudopériode, mais aussi que la décroissance de v(t ) soit suffisante pour
atteindre les maxima décroissants successifs. En considérant les courbes
0753
4XHVWLRQVRXYHUWHV
Le transfert de puissance est maximal entre une source de tension de fém
E et de résistance interne Rg et une résistance d’utilisation Ru lorsque
caniq
ue e
t des
Si l’on cherche à associer régulièrement n branches en parallèle avec chacune N / n
piles en série, la résistance interne équivalente de l’ensemble des piles est
§ N · 1 Nr
Réq = ¨ r ¸ . = 2 . Le transfert de puissance est maximal pour l’adaptation
©n ¹ n n
d’impédance Réq = R soit numériquement pour n = 4 , ce qui conduit à 4 branches
e Mé
en parallèle avec chacune 6 piles en série. En fait dans l’AN n est réel, tout
s’arrange pour N = 24 …
2
P = 30 W
périe
ure d
§ 6e ·
La puissance reçue par la lampe vaut alors P = R ¨
¸
© 2R ¹
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
70. Influence de la résistance sur les constantes de temps des dipôles RC et RL (*)
du
Pour le circuit RC la loi des mailles s’écrit τ C
+ u = E (1) avec τ C = RC
dt
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
Ru = Rg (c’est l’adaptation d’impédance).
techn
Rappel :
iques
:211
69. Association optimale de piles pour un meilleur éclairement
Indications : * Revoir la condition d’adaptation d’impédance à la question 23..
* La résistance interne d’une association de piles se détermine en
annulant leur fém.
(
)
(proportionnel à R ) de solution u (t ) = E 1 − e − t /τ C respectant u (0) = 0 .
du
E
(t = 0+ ) = , donc une pente à
dt
τC
l’origine d’autant plus faible que la résistance est grande et qu’à t → ∞ ,
du
(t → ∞) = 0 u = E , ∀R .
dt
La résistance intervient au début (pentes différentes) pour limiter le courant
important, donc la vitesse de charge, mais plus à la fin (même asymptote) lorsqu’il
est nul.
59:1
6925
3002
4
L’équation (1) montre qu’à t = 0 , u (0+ ) = 0
55.1
di
E
+i =
(2) avec τ L = L / R
dt
R
E
(inversement proportionnel à R ) de solution i (t ) = 1 − e − t /τ L respectant i(0) = 0 .
R
di
E
+
(t = 0 + ) =
donc une pente à
L’équation (2) montre qu’à t = 0 , i (0 ) = 0
dt
L
di
E
(t → ∞) = 0 i =
valeur
l’origine indépendante de R et qu’à t → ∞ ,
dt
R
d’asymptote d’autant plus basse que la résistance est élevée.
La résistance n’intervient pas au début (même pente) car à cause de l’auto-induction
(identique dans les deux cas), le courant reste nul, mais elle impose le courant à la
fin (asymptotes différentes) lorsque l’inductance ne joue plus de rôle.
)
0753
582:
8891
2320
:196
(
.65.1
Pour le circuit RL la loi des mailles s’écrit τ L
iques
E / R2
R1
R2 > R1
τ1
τ2
t
0
τ 2 τ1
t
caniq
0
ue e
t des
Micro
R2 > R1
R1
techn
E
:211
i (t )
E / R1
u (t )
périe
ure d
e Mé
71. Quelle trajectoire (de phase !) ?
L
On a τ = RC =
et LC = τ 2 .
R
Une trajectoire de phase est parcourue dans le sens des aiguilles d’une montre. La
continuité de la tension aux bornes du condensateur impose u (0 + ) = 0 ce qui exclut
le cas (1), première ligne à gauche.
e Na
Écol
tiona
le Su
Le réseau est linéaire en régime variable (avec conducteurs ohmiques) et la source
est continue ; le régime forcé sera atteint et il est continu.
&KDSLWUH
E
= 5 V ce qui
2
On obtient facilement, pour t → ∞ : i 2 ∞ = 0 , u L ∞ = 0 , soit u∞ =
exclut le cas (2), première ligne à droite.
6925
3002
4
Il reste donc à déterminer si le régime transitoire est pseudopériodique ou
apériodique pour distinguer entre les deux cas de la ligne du bas.
:196
.65.1
55.1
59:1
Les équations données par loi des mailles, loi des nœuds et relation entre variables,
sont :
di
­
° E = L dt + R i + u (1)
°
(2)
°u = R i 1
soit 4 équations pour 4 inconnues : i, i 1 , i 2 , u
®
°i 2 = C du
(3)
°
dt
°i = i + i
(4)
1
2
¯
582:
8891
2320
La continuité de u donne : u (0 + ) = u (0 − ) = 0 et celle de i : i (0 + ) = i (0 − ) = 0
du +
(2) i 1 (0+ ) = 0 ; (4) i 2 (0+ ) = 0 ; (3)
(0 ) = 0 qui ne permet pas de
dt
conclure puisque la relation est vérifiée dans les deux cas restants.
techn
d 2u 2 du 2
E
+
+ u= 2
dt 2 τ dt τ 2
τ
iques
:211
0753
Pour établir l’équation différentielle, on remplace i dans (1) avec (4) :
u
du
L du
d 2u
du
i = +C
E=
+ LC 2 + u + RC
+u
R
dt
R dt
dt
dt
En notant τ la constante de temps :
2
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
ure d
e Mé
caniq
72. Convertisseur parallèle
Les résistances r , 2r et 3r sont en série et on peut utiliser un diviseur de tension.
V
r
Les bornes d’entrée du comparateur (7) sont au potentiel u et V7 = Vréf
= réf .
16 r 16
3r
3
15 − 2 k
= Vréf et plus généralement Vk =
Vréf .
De même V6 = Vréf
16 r 16
16
Si u < Vk la sortie du comparateur est à 0 et si u > Vk la sortie est à 1.
V
Ainsi u < réf sorties 0000000 et s N vaut 0.
16
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
8
4
§2·
Le discriminant de l’équation caractéristique est donc Δ = ¨ ¸ − 2 = − 2 < 0 .
τ
τ
τ
© ¹
Le régime transitoire est la somme du régime libre pseudopériodique et du régime
forcé continu. Il y a des oscillations, c’est donc le cas (3), deuxième ligne à gauche.
Vréf
16
<u<
Jusqu’à
3Vréf
16
13Vréf
16
sorties 0000001 et s N vaut 1.
< u < Vréf sorties 1111111 et s N vaut 7 (en décimal).
6925
3002
4
9
11
Vréf = 1,125 V < 1, 32 < Vréf = 1, 375 V , soit
16
16
une valeur décimale de s N de 5 = 2 2 + 2 0 donc 101 en base 2
59:1
Les valeurs proposées donnent :
:196
.65.1
55.1
73. Durée de la décharge d’un défibrillateur
Indications : S’intéresser d’abord à la charge du défibrillateur sous une tension E à
travers une résistance R , puis utiliser la courbe i( q) pour en déduire
des données numériques ; ensuite seulement, envisager la décharge à
travers la résistance R p à évaluer du patient.
q
= E (1) ce qui donne directement
C
i ( q) =
E q
−
R τ
où τ = RC est la durée
582:
Ri +
8891
2320
Charge du défibrillateur
Les orientations sont celles de la question 25. et l’équation de maille :
dq
).
dt
Cette équation affine de pente négative (l’intensité diminue au cours de la charge)
permet l’identification avec la courbe i ( q ) de l’énoncé :
E
= 1,5 A (valeur de l’intensité i pour q = 0 , donc au début de la charge)
R
1
1,50 − 0
= 2,14 s −1 (la pente de la courbe donnée par
)
τ
0, 70 − 0
Micro
ue e
t des
On en déduit :
– la durée caractéristique de la charge : τ = 0, 47 s
techn
iques
:211
0753
caractéristique de la charge (avec les orientations choisies i =
τ
= 1, 0 kΩ , et la force
C
électromotrice de la source de tension continue, d’après (1) au bout d’un temps
q
long 0 + ∞ = E avec q∞ = 0, 70 C , d’où E ≈ 1,5 kV .
C
caniq
– ainsi que la résistance R du circuit de charge R =
∞
q∞
0
0
e Mé
Rq : Lors de la charge du condensateur, l’énergie fournie par le générateur est
ure d
E gén = ³ E idt = ³ E dq = E q ∞ soit E gén = CE 2 ≈ 1,06 kJ . Le condensateur
1 q∞2
= C E 2 soit la moitié seulement ( 530 J ), l’autre
2 C
moitié est dissipée par effet Joule dans la résistance.
e Na
Écol
tiona
le Su
périe
reçoit et emmagasine
&KDSLWUH
6925
3002
4
Utilisation du défibrillateur
D’après la position des électrodes, on peut estimer que le courant va passer dans la
résistance R 3 en parallèle avec l’association série de R 2 et R 3 (de l’épaule droite
du patient vers son flan gauche afin de passer par le cœur), d’où la résistance
R (R + R3)
présentée par le patient : R p = 3 2
≈ 78 Ω .
R 2 + 2R 3
.65.1
55.1
59:1
La durée caractéristique de décharge dans le patient est donc τ p = R pC ≈ 37 ms .
Mais l’énoncé demande la durée de la décharge qui s’obtient en traduisant qu’elle
s’arrête lorsque le défibrillateur a délivré une énergie Edél = 300 J au patient.
La décharge du défibrillateur dans le patient (régime libre, schéma
ci-contre) se fait suivant la loi classique (système du 1er ordre)
i
RP
q
dq q∞ − t /τ p
E − t /τ p
− t /τ p
q(t ) = q∞ e
avec une intensité i = −
=
e
=
e
.
C
dt τ p
Rp
2320
:196
L’énergie Joule reçue par le patient entre t = 0 et t > 0 est :
t
E 2 t −2 t /τ p
1
−2 t /τ
E J (t ) = ³ R pi 2 (t )dt =
dt = CE 2 (1 − e p )
e
³
0
0
Rp
2
2
582:
τp
2 Edél
)
CE 2
ln(1 −
0753
t′ = −
8891
En traduisant que E J (t ′) = Edél , il vient la durée d’une décharge :
:211
AN : t ′ ≈ 15 ms assez court, moins de la moitié de τ P .
techn
iques
Rq : Avant d’administrer la prochaine décharge, il faut recharger le condensateur.
La constante de temps de la charge étant τ = 0, 47 s , il faut attendre environ
5τ = 2, 4 s .
ue e
t des
Micro
74. Tronçonneur
Indication : La réponse à la question est dans le titre ! S’aider de la question 43..
caniq
Soit v (t ) = e(t ) pour − E 2 < e < E1 .
Reste les cas e > E1 et e < − E 2 :
e Mé
* si D1 passante, v = E1 , donc u 2 = −v − E 2 < 0 et D2 bloquée.
La condition i > 0 e > E1 .
ure d
* si D2 passante, v = − E 2 , donc u1 = v − E1 < 0 et D1 bloquée.
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
La condition i < 0 e < − E 2 .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Si les deux diodes sont bloquées, v(t ) = e( t ) , ce qui se produit pour :
u1 = v − E1 < 0 e(t ) < E1 et u2 = −v − E2 < 0 e(t ) > − E2
e(t)
E1
v(t)
55.1
59:1
−E2
6925
3002
4
t
:196
.65.1
En sortie toutes les valeurs supérieures à E1 et inférieures à − E 2 sont coupées d’où
le qualificatif de tronçonneur.
2320
7UDYDX[SUDWLTXHV
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
75. Les points de mesures portés sur un graphe U ( I ) indiquent un alignement probable.
2
2
2
e Mé
caniq
On estime les incertitudes.
• Sur U : lecture sur le voltmètre
§ 0, 09 × 5 ·
§ 2 × 0, 001 ·
de 2 ¨
¸ +¨
¸ ≈ 0, 006 V à 95% pour 5 V,
3
© 100 × 3 ¹
©
¹
2
périe
ure d
§ 0, 09 × 1 ·
§ 2 × 0, 001 ·
à 2 ¨
¸ +¨
¸ ≈ 0, 003 V à 95% pour 1 V.
3
© 100 × 3 ¹
©
¹
e Na
Écol
tiona
le Su
• Sur I : lecture sur le milliampèremètre
&KDSLWUH
2
2
2
2
§ 0, 5 × 10 ·
§ 3 × 0, 01 ·
de 2 ¨
¸ +¨
¸ ≈ 0, 07 mA à 95% pour 10 mA,
3 ¹
© 100 × 3 ¹
©
6925
3002
4
§ 0, 5 × 1 ·
§ 3 × 0, 01 ·
à 2 ¨
¸ +¨
¸ ≈ 0, 04 mA à 95% pour 1 mA.
3 ¹
© 100 × 3 ¹
©
.65.1
55.1
59:1
La résistance d’entrée du voltmètre rend négligeable l’intensité du courant qui le
traverse , une correction de l’intensité I est inutile.
Les incertitudes justifient les écarts (très faibles) à la droite moyenne. Le
comportement linéaire est expérimentalement avéré à 95%.
Une régression linéaire donne une pente R = (498 ± 3) Ω et une ordonnée à
l’origine 0,00 V. Le dipôle est appelé conducteur ohmique et obéit à la loi d’Ohm :
U AB = R I AB
Micro
techn
iques
:211
0753
582:
8891
2320
:196
76. Les points de mesures portés sur un graphe U ( I ) et placés aléatoirement de part et
d’autre d’une droite moyenne, indiquent un alignement probable.
2
ure d
e Mé
caniq
§ 3 × 1, 5 ·
§ 0, 05
·
2 ¨
× 2 ¸ ≈ 0, 08 V à 95% pour la mesure 1,5 V, soit une
¸ +¨
© 12
¹
© 100 × 3 ¹
0, 08
≈ 0, 05 de l’ordre de 5%.
incertitude relative
1,5
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
• Sur I : lecture sur le milliampèremètre
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
2
ue e
t des
On estime les incertitudes.
• Sur U : mesure à l’oscilloscope (2 lectures, graduation 0, 05 V pour 0,5 V/div., et
appareil)
2
2
6925
3002
4
§ 0,5 × 15 ·
§ 3 × 0, 01 ·
2 ¨
¸ +¨
¸ ≈ 0, 09 mA à 95% pour la mesure 15 mA, soit
3 ¹
© 100 × 3 ¹
©
0,1
≈ 0, 007 de l’ordre de 0,7%.
une incertitude relative
15
Noter que la valeur de R n’intervient pas dans la mesure.
.65.1
55.1
59:1
Les incertitudes justifient les écarts (essentiellement sur U) à la droite moyenne. Le
comportement linéaire est expérimentalement avéré à 95%.
Une régression linéaire donne une pente − r = −131 Ω et une ordonnée à l’origine
2,76 V. Le dipôle se comporte comme une source linéaire, il obéit à la loi
U BA = e − r I AB . On l’appelle modèle de Thévenin, e est la fém et r est appelée
résistance interne. Voir les modélisations linéaires questions 14. et 15..
2
582:
8891
2320
:196
77. La fém . e de la source de tension correspond à la tension à vide aux bornes du
dipôle, on peut la mesurer avec un voltmètre de grande résistance interne (il faut
R voltmètre r résistance interne de la source réelle) pour que la condition I = 0 soit
vérifiée lors de la mesure. C’est ici le cas car R voltmètre = 10 MΩ et l’étude préalable
donne r de l’ordre de 130 Ω. Il vient e = U 0 = 2, 743V . Les erreurs de mesures ne
concernent que le multimètre numérique :
2
ue e
t des
Micro
techn
iques
:211
0753
§ 0, 09 × 2, 743 ·
§ 2 × 0, 001 ·
2 ¨
¸ +¨
¸ ≈ 0, 004 V e = (2, 743 ± 0, 004) V
3
© 100 × 3 ¹
©
¹
La résistance interne r se mesure par la méthode de la résistance adaptée. Si on
place une résistance aux bornes d’une source de tension, il est facile de montrer
(avec un diviseur de tension) que si cette résistance a la valeur r , la tension à ses
e
bornes est . En réglant la valeur de la résistance on a affiché sur le voltmètre la
2
U0
e
≈ , la valeur mesurée de R1 est une mesure de r : r = 129, 4 Ω .
valeur
2
2
U
Les erreurs de mesure concernent ici la mesure de R1 et la mesure 0 , dans la
2
mesure de R1 , il faut prendre en compte l’ohmmètre et l’erreur de méthode lorsque
2
caniq
l’on prend U 0 au lieu de e.
2
soit
U (U 0 ) 0, 004
U 2 ( R1 )
=2
≈
≈ 0,14%
R1
U0
2, 74
périe
dU 0
dR1 dU 0 d (2e − U 0 )
=
−
≈2
R1
U0
2e − U 0
U0
ure d
e Mé
§ 0,5 × 129, 4 ·
§ 2 × 0,1 ·
U 1 ( R1 ) = 2 ¨
¸ +¨
¸ ≈ 0, 78 Ω
3 ¹
© 100 × 3 ¹
©
U
U0
R1
R1 = r
De plus 0 = e
R1 + r
2
2e − U 0
e Na
Écol
tiona
le Su
Finalement : U ( R1 ) = U 1 2 ( R1 ) + U 2 2 ( R1 ) ≈
0, 78 2 + 0,19 2 ≈ 0,8 Ω
&KDSLWUH
Il vient : R1 = (129, 4 ± 0,8) Ω les valeurs trouvées sont cohérentes avec les
valeurs déterminées par l’étude graphique.
59:1
6925
3002
4
78. Une bobine de transformateur, dont l’inductance est typiquement de 10 mH ,
possède en série une petite résistance (celle de ses 500 tours de fil de cuivre) de
l’ordre de quelques Ω . Un condensateur courant de capacité 0,1 ȝF possède en
parallèle une grande résistance (celle de son diélectrique) de l’ordre de quelques
centaines de kȍ .
55.1
79. Il y a longtemps, sur les oscilloscopes analogiques, on appliquait la « méthode des
90 % ».
La constante τ de charge d’un condensateur est liée à sa tension u (t ) par
.65.1
u (t ) = E (1 − e − t /τ ) . L’instant t1 après la fermeture de l’interrupteur où u (t1 ) = 0,9 E
:196
( E est la tension du générateur) est donné par t1 = τ ln10 . La détermination
expérimentale de t1 sur l’écran d’un oscilloscope (le signal est à 90 % de sa valeur
0753
582:
8891
2320
asymptotique) conduit à τ ≈ t1 / 2, 3 .
Sur un oscilloscope numérique, on affiche avec un curseur horizontal 63% de la
valeur asymptotique, et on lit, grâce à un curseur vertical, à l’intersection avec la
courbe u (t ) la durée τ . En effet u (τ ) = E (1 − e − 1 ) ≈ 0, 63 E .
En fait il s’agit de la même méthode, on peut plus généralement choisir n’importe
quel pourcentage de la tension finale. Le plus simple étant 63%.
A
R
YI
i i
i2
1
L
C
i3
r
u
e Na
Écol
5pJLPHVFRQWLQXHWWUDQVLWRLUH
tiona
le Su
périe
ure d
81. Le point commun entre l’entrée sur
B
l’oscilloscope et le générateur doit
être la masse, d’où le branchement.
K
Le problème de la visualisation
simultanée de u et Ri est qu’il
faudrait placer la masse de E
l’oscilloscope en A, le point commun
pour les entrées YI et YII , mais cette
M
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
80. Le dipôle LC n’est pas parfait, il y a la
u (t )
résistance r de la bobine (plus accessoirement
celle des fils) ; on observe alors bien des
oscillations, mais leur amplitude n’est pas
constante, mais assez rapidement amortie au
cours du temps comme prévu à la question 31.
t
0
t1
(par ailleurs le créneau n’est pas délivré par un
générateur de tension parfait, mais qui présente
une résistance interne de l’ordre de 50 Ω ).
Pour visualiser entièrement la décroissance de
ce régime pseudopériodique amorti, le créneau doit avoir une période suffisante (de
l’ordre de plusieurs pseudopériodes t1 ) pour ne pas interrompre la décroissance en le
relançant prématurément, ce qui suppose une fréquence du créneau bien inférieure à
la fréquence de l’oscillateur.
6925
3002
4
masse est commune avec celle du générateur (par l’intermédiaire de la prise de terre)
qui se trouve en M. Tous les dipôles entre A et M seraient court-circuités. La seule
possibilité est d’utiliser une sonde différentielle entre AB et l’entrée YII de
l’oscilloscope, pour isoler physiquement le point A de la masse.
2π
= 0, 63ms
La pseudo-période est T =
12
2
(ω0 − λ 2 )
.65.1
55.1
59:1
a) Avec un oscilloscope analogique il faut répéter le phénomène un grand nombre
de fois, pour pouvoir le voir. On envoie à l’entrée du montage un signal carré,
correspondant ainsi à la répétition de plusieurs échelons de tension. Pour laisser
le temps au dipôle de revenir aux mêmes conditions initiales, il faut que la
période du signal carré soit assez grande devant la pseudopériode. On peut
prendre TCarré = 10 T ≈ 6 ms .
2320
:196
b) Avec un oscilloscope numérique, on peut faire l’acquisition de la réponse à
l’échelon de tension directement. Compte tenu de la rapidité du phénomène, un
déclenchement manuel est impossible, il faut faire un déclenchement
synchronisé.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
82. Pour minimiser l’effet de la tension de seuil de la diode, il faut prendre
U max ≈ 10 V Vseuil ≈ 0, 6 V . Par ailleurs une diode suit mal pour des fréquences
élevées, il convient de ne pas dépasser quelques centaines de Hz (une tension de
1 V à 10 kHz donne un résultat contre toute attente !).
&KDSLWUH
59:1
6925
3002
4
&KDSLWUH
5pJLPHVLQXVRwGDOIRUFp
HWILOWUDJH
.65.1
55.1
/HVRUGUHVGHJUDQGHXUXWLOHV
:196
Ils sont regroupés au début du chapitre précédent, page 197.
2320
/HFRXUVG·DERUG
8891
5pJLPHYDULDEOH
0753
582:
1. Rappeler les définitions d’un signal variable périodique, de sa valeur moyenne.
Qu’appelle-t-on composante continue, composante alternative de ce signal ?
iques
:211
2. Définir la valeur efficace d’un signal périodique. Calculer la valeur efficace d’un
signal alternatif sinusoïdal. Quelle est la relation entre valeur efficace, valeur
moyenne et valeur efficace de la composante alternative d’un signal périodique
quelconque ?
techn
/HUpJLPHVLQXVRwGDOIRUFp QRWp56) ue e
t des
Micro
3. Qu’appelle-t-on complexe associé à une grandeur sinusoïdale ? Revoir ensuite
l’utilisation des complexes dans le chapitre 0. (MPSI) Qu’est-ce que la
représentation de Fresnel.
caniq
4. Qu’appelle-t-on régime sinusoïdal forcé ? Pourquoi les lois de Kirchhoff s’écriventelles avec les représentants complexes des grandeurs électriques en régime
sinusoïdal forcé ?
périe
ure d
e Mé
5. Rappeler les expressions des impédances complexes, notées Z , des dipôles linéaires
en régime variable de type conducteur ohmique de résistance R , bobine parfaite
d’inductance L et condensateur parfait de capacité C . Préciser dans chaque cas la
relation entre u et i . Que représente arg ( Z ) ? Quelle est sa valeur dans chacun des
cas précédents ? (MPSI) Donner la représentation de Fresnel dans chaque cas.
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
6. Quel est l’intérêt de la notation complexe ? Que devient l’équation différentielle
d’un réseau linéaire en RSF ? Quelles conséquences cela a-t-il sur la façon de
résoudre ce réseau ?
7. Un dipôle aux bornes duquel la tension est u AB (t ) = U 2 cos ω t , est traversé par un
6925
3002
4
courant d’intensité iAB (t ) = I 2 cos(ω t − ϕ ) . Quelle est la puissance moyenne P
reçue par ce dipôle ? Change-t-elle suivant que le dipôle est actif ou passif ?
Dépend-elle du signe de ϕ ? Quelle est la puissance moyenne reçue par un
conducteur ohmique ? une bobine parfaite ? un condensateur parfait ?
59:1
&RPSRVLWLRQVSHFWUDOHG·XQVLJQDOSpULRGLTXH
.65.1
55.1
8. Qu’est-ce que la décomposition en série de Fourier d’un signal périodique ?
Qu’appelle-t-on spectre des fréquences ?
2320
:196
9. Commenter les spectres des fréquences, donnés ci-dessous, des signaux
s1 (t ) = S m sin ω t et s 2 (t ) = S m sin ω t .
sin ω t
0753
582:
8891
sin ω t
n
iques
:211
n
i
L
C
R
caniq
ue e
t des
10. Un dipôle RLC série est alimenté par un
générateur de tension de pulsation ω et de
valeur efficace U = cste : u = U 2 cos (ω t ) u
Quelle tension permet d’étudier la réponse en
intensité en RSF : i = I 2 cos (ω t − ϕ ) ?
Micro
Les notations sont communes aux questions 10. à 14..
techn
/HGLS{OH5/&VpULHHQUpJLPHVLQXVRwGDOIRUFp
ure d
e Mé
11. Pourquoi parle-t-on de réponse fréquentielle ? Donner l’allure de I (ω ) et ϕ (ω ) .
Définir le phénomène de résonance d’intensité ; pour quelle pulsation se produit-il ?
Que vaut Z pour cette valeur de ω ? Commenter.
e Na
Écol
tiona
le Su
périe
12. Définir la bande passante Δω , pour la résonance d’intensité, puis le facteur de
qualité Q du dipôle RLC série.
&KDSLWUH
6925
3002
4
13. Que représente, pour les grandeurs u et i, arg Z ? Expliquer qualitativement sa
valeur à la résonance d’intensité. Que sait-on des variations de ϕ dans la bande
passante, et sur l’ensemble du spectre de fréquence ? (MPSI) Retrouver le signe de
ϕ avec la construction de Fresnel.
uR U R
=
. La mettre sous forme canonique
u
U
en utilisant uniquement la pulsation réduite x = ω / ω0 , avec ω 0 la pulsation propre
du dipôle RLC, et le facteur de qualité Q. Décrire les propriétés du filtre ainsi défini.
59:1
14. Écrire la fonction de transfert H ( jω ) =
582:
8891
2320
:196
.65.1
55.1
15. Considérer à présent la tension u C (t ) aux
i
L
bornes du condensateur et écrire la
R
u
uC
fonction de transfert :
C
uC U C
=
= H (ω ) e jψ (ω )
H ( jω ) =
u
U
La mettre sous forme canonique en utilisant uniquement la pulsation réduite
x = ω / ω0 , avec ω 0 la pulsation propre du dipôle RLC, et le facteur de qualité Q.
Que vaut ψ en fonction de ϕ défini à la question 11. ? Que représente-t-il pour les
grandeurs u C (t ) et u (t ) ?
π
:211
ψ ( x = 1) = −
0753
16. (suite de la question 15.) On donne ci-dessous le graphe de H ( x) pour diverses
valeurs de Q, un graphe plus détaillé pour Q = 2 et le graphe de ψ ( x ) . Justifier que
H
1
e Mé
Q = 0,5
xr 1
ure d
x
x
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
1
Q=2
caniq
Q = 0, 7
ue e
t des
2
Q = 1, 5
1
Micro
H
Q=4
techn
iques
pour toute valeur de Q, que la résonance se produise pour x = 1
2
quand Q est très grand. Pour quelles valeurs de Q y a-t-il une résonance ? Et si elle
a lieu, pour quelle pulsation ? Quelle est la limite de ψ pour x → ∞ ?
ψ
1
π
Q = 0,5
2
Q = 0, 7
55.1
Q = 1,5
Q=4
59:1
−
6925
3002
4
x
2320
:196
.65.1
17. (suite de la question 16.) Étudier la fonction H ( x) ; pour quelles valeurs de Q se
produit-il une résonance ? Pourquoi l’appelle-t-on résonance de charge ? Exprimer
la pulsation ωr de résonance de charge (lorsqu’elle existe) en fonction de ω0 et Q .
Que vaut la tension aux bornes du condensateur à la pulsation ω0 ? Que représente
alors le facteur de qualité Q dans le cas Q > 1 ?
8891
)LOWUHV
:211
0753
582:
18. Définir et orienter un quadripôle. Préciser la signification des tensions d’entrée et de
sortie. Quelles sont les conditions particulières d’étude d’un quadripôle et
pourquoi ?
iques
19. On peut représenter graphiquement une fonction de transfert à l’aide d’un
diagramme de Bode. De quoi est-il constitué ? Quel est son intérêt ?
techn
20. Filtre fondamental du premier ordre. Donner sa définition (fonction de transfert), un
exemple simple, son comportement en haute fréquence (HF) et en basse fréquence
(BF). Faire l’étude de H ( x) = H ( jx) , x pulsation réduite, et en déduire le type de
ue e
t des
Micro
ce filtre. Donner l’allure de H ( x) et arg ( H ( jx) ) en fonction de x . Préciser les
pulsations de coupure. Tracer le diagramme asymptotique de Bode en amplitude.
caniq
21. Filtre passe-haut du premier ordre. Donner sa définition (fonction de transfert), un
exemple simple, son comportement en haute fréquence (HF) et en basse fréquence
(BF). Faire l’étude de H ( x) = H ( jx) , x pulsation réduite, et en déduire le type de
e Mé
ce filtre. Donner l’allure de H ( x) et arg ( H ( jx) ) en fonction de x . Préciser les
pulsations de coupure. Tracer le diagramme asymptotique de Bode en amplitude.
périe
ure d
22. Définir un filtre du second ordre, justifier l’écriture canonique du dénominateur :
x
1 − x2 + j
Q
e Na
Écol
tiona
le Su
23. Filtre fondamental du second ordre. Donner sa définition (fonction de transfert), un
exemple simple. En vous aidant de l’étude de la résonance de charge dans un RLC
&KDSLWUH
6925
3002
4
série (questions 15. à 17.), donner le comportement en fréquence d’un filtre
fondamental du second ordre ainsi que le graphe H ( x) = H ( jx) , x pulsation
réduite. Distinguer suivant les valeurs de Q la nature du filtre. Donner l’allure de
arg ( H ( jx) ) en fonction de x . Justifier le diagramme de Bode en amplitude donné
ci-dessous pour diverses valeurs de Q ( 4, 1, 1 2 et 0, 5 ), le diagramme
asymptotique est en trait épais et les diagrammes réels en trait fin :
59:1
G dB
55.1
x
1
.65.1
éch. log
8891
2320
:196
−40 dB/décade
0753
582:
24. Filtre passe-bande du second ordre. Donner sa définition (fonction de transfert), un
exemple simple, En vous aidant de l’étude de la résonance d’intensité dans un RLC
série (questions 10. à 14.), donner le comportement en fréquence d’un filtre passebande du second ordre ainsi que le graphe H ( x) = H ( jx) , x pulsation réduite.
:211
Donner l’allure de arg ( H ( jx) ) en fonction de x . Justifier le diagramme de Bode
techn
iques
en amplitude donné ci-dessous pour Q > 1 (graphe de gauche) et pour Q < 1
(graphe de droite), le diagramme asymptotique est en trait épais et le diagramme réel
en trait fin :
−20 log Q
G dB
1
x
ue e
t des
éch. log
Micro
G dB
x
éch. log
ure d
e Mé
caniq
−20 log Q
1
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
25. Donner la modélisation d’un amplificateur linéaire. Qu’appelle-t-on amplificateur
idéal ?
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
6925
3002
4
Ne pas confondre signal alternatif (sa valeur moyenne est nulle) et signal
sinusoïdal qui est un signal alternatif particulier (de forme sinusoïdale).
55.1
59:1
Un signal périodique quelconque, non sinusoïdal, a une période et une
fréquence (l’inverse de la période), mais on ne peut pas lui associer de
pulsation (celle-ci concernerait le fondamental de sa décomposition en série de
Fourier).
2320
:196
.65.1
Parler d’avance de phase ou de retard de phase n’a de sens que pour des
signaux sinusoïdaux synchrones (de même pulsation). Éviter le terme
« déphasage » auquel tout le monde ne donne pas le même sens et préférer
« avance de phase » ou « retard de phase » sans ambiguïté. Le déphasage
correspond, d’après les normes AFNOR, au retard de phase.
582:
8891
En régime sinusoïdal forcé (en particulier avec un terme dissipatif), il faut
automatiquement passer en notation complexe, même si l’énoncé n’invite pas
explicitement à le faire. Souligner les grandeurs complexes afin de ne pas les
confondre avec les grandeurs réelles associées.
:211
0753
Les lois de Kirchhoff s’écrivent avec les valeurs efficaces complexes, mais pas
avec les modules de ces valeurs. Par exemple une loi des nœuds s’écrit
I = I 1 + I 2 mais on peut avoir I ≠ I 1 + I 2 , voir les questions 13. et 46..
iques
Utiliser le moyen mnémotechnique : l’avance de phase de « u1 (t ) sur u 2 (t ) »
Micro
techn
§u ·
est égale à l’argument de « u 1 sur u 2 », soit arg ¨ 1 ¸ . Revoir la partie
© u2 ¹
Nombres complexes au chapitre 0.
e Mé
caniq
ue e
t des
Pour traduire par le calcul une question physique du type « À quelle condition
u
u
sur ω , u (t ) et i (t ) sont-ils en phase ? », il suffit d’écrire arg = 0 ou
réel
i
i
positif.
Et pour la question « À quelle condition sur ω , u (t ) et i (t ) sont-ils en
u
u
opposition de phase ? », il suffit d’écrire arg = π ou
réel négatif.
i
i
périe
ure d
Dans les applications numériques, ne pas confondre la pulsation ω (en rad.s–1)
et la fréquence f (en Hz) et bien penser au facteur 2π de la relation
ω = 2π f .
e Na
Écol
tiona
le Su
Se méfier des significations différentes des flèches de tension à l’entrée et à la
sortie d’un quadripôle, voir la question 18..
&KDSLWUH
6925
3002
4
L’expression pour le facteur de qualité Q = Lω0 / R n’est valable que pour un
RLC série. Dans le cas d’un second ordre différent, il faut établir l’expression
de Q grâce à l’écriture canonique du dénominateur de la fonction de transfert.
55.1
59:1
Dans un diagramme de Bode, la position de l’axe des ordonnées (gain en dB
par exemple) n’a aucune signification : l’axe des abscisses est en échelle
logarithmique, la fréquence nulle est rejetée à − ∞ . Éviter de placer cet axe des
ordonnées au bord de la feuille de papier semi-log.
8891
2320
:196
.65.1
Le terme amplificateur est plutôt utilisé pour les quadripôles actifs qui traitent
de la même façon « toutes » les fréquences du signal d’entrée (bande passante
très large) et donc amplifient sans déformer le signal : cas d’une fonction de
transfert constante. Le terme filtre s’utilise pour les quadripôles, actifs ou
passifs, qui sélectionnent certaines fréquences. On peut aussi qualifier le
quadripôle par la façon dont il transforme le signal d’entrée : intégrateur,
dérivateur.
:211
0753
582:
Dans les problèmes et les exercices, on utilise souvent les passe-bas comme
« moyenneur ». Un passe-bas à fréquence de coupure haute bien choisie permet
de ne récupérer en sortie que la composante continue du signal d’entrée et donc
sa valeur moyenne.
techn
iques
$SSOLFDWLRQVGLUHFWHVGXFRXUV
Micro
5pJLPHYDULDEOH
ue e
t des
26. Quelle est la valeur moyenne du signal représenté en a) ? Quelles sont les valeurs
moyenne et efficace des signaux représentés en b) et c) ?
b) u1
U0
a) i
c)
u2
2U 0
t
−U 0
ure d
/HUpJLPHVLQXVRwGDOIRUFp QRWp56) t
e Mé
t
caniq
I0
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
27. Dans le réseau ci-contre, e(t ) = E 2 cos (ω t ) ,
exprimer u (t ) en RSF.
r
e
R
C
u
6925
3002
4
28. Soient les associations :
a) dipôle RC série ;
b) dipôle RL parallèle ;
c) dipôle R en série avec un dipôle LC parallèle ;
:196
L
r
8891
2320
K i
582:
29. Établissement du courant dans un dipôle rL
À l’instant t = 0 , on ferme l’interrupteur K (donc i = 0
pour t < 0 ) ; la bobine résistive est alimentée par la
tension v(t ) = V 2 cos ω t .
v(t )
Chercher la solution du régime permanent sous la forme
i p (t ) = I 2 cos(ω t − ϕ ) en donnant I et ϕ , puis
.65.1
55.1
59:1
* Calculer les impédances complexes équivalentes de chaque association. Dans
chaque cas exprimer le module et l’argument de l’impédance complexe.
* Que deviennent ces impédances lorsque ω tend vers 0 puis vers l’infini ? Quelle
est la signification physique de ces limites pour ω ?
* Pouvait-on prévoir sans calculs le comportement de chaque impédance
équivalente en haute et basse fréquence ?
* Calculer numériquement module et argument de chaque impédance équivalente
avec : f = 50 Hz ; R = 100 Ω ; L = 100 mH ; C = 1,0 ȝF
0753
donner l’expression i(t ) en régime transitoire en notant τ = L r ; commentaire.
Z2
D
Z3
caniq
ue e
t des
Micro
techn
iques
:211
30. Pont de Maxwell
A
Dans le circuit ci-contre de type pont, la source d’alimentation a une fém e(t ) fonction sinusoïdale du temps,
Z1
i1
l’impédance Z d est l’impédance interne d’un détecteur de
courant (microampèremètre). Le pont est dit « équilibré » C
Zd
en RSF quand l’intensité du courant dans le microampèremètre est nulle.
Z4
Si le pont est équilibré, que vaut la d.d.p. V A − V B ?
B
Établir une condition nécessaire sur les impédances Z 1 ,
Z 2 , Z 3 et Z 4 pour que le pont soit équilibré.
Cette condition est-elle suffisante ?
e(t )
Les ponts en RSF permettaient notamment des mesures
précises d’impédances.
e Mé
Exemple : Dans le pont de Maxwell, Z 1 est l’impédance d’une bobine réelle, Z 3
l’impédance d’un condensateur de capacité C 3 en parallèle avec une résistance R3 ,
ure d
Z 2 = R 2 une résistance, et Z 4 = R 4 une résistance.
périe
Déterminer, à l’équilibre, la résistance R1 et l’inductance L1 de la bobine en
fonction de R 2 , R3 , R4 et C 3 . Décrire un protocole expérimental de mesure de R1 et
tiona
e Na
Écol
le Su
L1 .
&KDSLWUH
e(t )
Zs
u s (t )
A e(t )
R
résistance utilisation
amplificateur
59:1
Commande
Re
6925
3002
4
31. Étude expérimentale d’un amplificateur
On modélise un quadripôle amplificateur comme ci-dessous, avec Re infinie.
.65.1
55.1
Le gain A est réel. On applique à l’entrée e(t ) = E 2 cos(ω t ) , avec E = 1, 0 mV ,
et on mesure pour deux valeurs de R la tension efficace de sortie. On obtient :
Pour R = 16, 0 ȍ , U s = 0, 67 V
2320
:196
Pour R = 8, 0 ȍ , U s = 0,50 V
a) On constate lors des mesures que les signaux de sortie gardent la même valeur
efficace quelle que soit la fréquence. Que peut-on en déduire pour Z s ?
b) Déterminer le gain A et l’impédance de sortie Z s .
582:
8891
c) L’amplificateur étant alimenté par e(t ) = E 2 cos(ωt ) , comment choisir la
résistance R pour qu’elle reçoive une puissance maximale à E = cste ?
0753
&RPSRVLWLRQVSHFWUDOHG·XQVLJQDOSpULRGLTXH
4E §
1
1
1
·
cos(ω1t ) − cos(3ω1t ) + cos(5ω1t ) − cos(7ω1t ) + .... ¸
𠨩
3
5
7
¹
est la décomposition en série de Fourier du signal cis (t )
contre :
2E
ω
1
T étant la période : f c = 1 = . Représenter le
T
2π
spectre des fréquences, à l’échelle, jusqu’au rang 10.
t
Pourquoi la décomposition ne comporte-t-elle que des
0
termes en cosinus ?
Généraliser pour la décomposition spectrale d’un signal s(t ) suivant que la
composante alternative s a (t ) = s (t ) − s 0 est paire ou impaire.
caniq
ue e
t des
Micro
techn
iques
:211
32. s (t ) = s 0 +
e Mé
/HGLS{OH5/&VpULHHQUpJLPHVLQXVRwGDOIRUFp
ure d
33. Montrer, à partir de l’impédance équivalente, que si la bande passante pour la
tension aux bornes de R d’un dipôle RLC série, en RSF, est l’intervalle [ f1 , f 2 ] ,
f1 f 2 .
périe
alors la fréquence de résonance f 0 est : f 0 =
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
34. Un dipôle RLC série est alimenté par une source de tension sinusoïdale de
fréquence f variable et d’amplitude Em = 100 V . La valeur efficace de l’intensité
est maximale ( I maxi = 0,71 A ) pour une fréquence
f 0 . Pour les fréquences
6925
3002
4
f1 = 7, 3 kHz et f 2 = 13, 6 kHz , elle vaut 0,50 A .
Déterminer les valeurs numériques approchées de la fréquence de résonance
d’intensité du circuit, du facteur de qualité Q , de la résistance R , de l’inductance
L , de la capacité C , et des valeurs efficaces des tensions uC et u L à la résonance
d’intensité.
59:1
)LOWUHV
b)
a)
R
us
8891
2320
C
36. Un filtre a pour fonction de transfert : H =
0753
582:
L
2C
−2
, préciser :
1 + jωτ
a) la nature du filtre,
b) le gain maximal en dB,
c) la (ou les) fréquence(s) de coupure,
d) u s (t ) est-elle en avance ou en retard sur u e (t ) ?
:211
Dans le cas b), étudier le cas R =
ue
us
iques
L
:196
L
C
techn
R
ue
.65.1
55.1
35. Pour les deux filtres suivants, établir la fonction de transfert complexe en tension et
l’identifier en la mettant sous forme canonique.
R
R
u2
C
L
R
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
37. Dans le réseau représenté ci-contre, on impose
u1 (t ) = E 2 cos (ω t ) et on considère un régime
sinusoïdal forcé.
Que signifie pour ce réseau un fonctionnement en
u1
basse fréquence ?
En raisonnant directement par équivalents, établir
U
le rapport 2 en basse fréquence puis en haute
U1
fréquence.
&KDSLWUH
38. Dans le circuit ci-contre, H est le rapport
L
il s’écrit :
2C
N
H =
jx
1 − x2 +
Q
Trouver les propositions exactes :
a) Q = 1 / 2 et u c (t ) passe par un maximum.
U s U e , avec R =
R
6925
3002
4
2 et u c (t ) ne passe pas par un maximum.
1
2
.
2320
( 1 + jω / ω 0 )
:196
.65.1
2 et u c (t ) passe par un maximum.
39. Un filtre a pour fonction de transfert H =
us
59:1
R
c) Q = 1 / 2 2 et u c (t ) ne passe pas par un maximum.
d) Q =
C
55.1
b) Q = 1 /
L
ue
8891
Trouver les propositions exactes :
582:
a) Le filtre est un filtre de Butterworth d’ordre 2 (filtre fondamental du second ordre
de coefficient Q = 1 / 2 ).
b) Le filtre est un filtre passe-bas de pulsation de coupure ω 0 .
0753
c) Le filtre est un filtre passe-haut de pulsation de coupure ω 0 .
2 − 1.
iques
:211
d) Le filtre est un filtre passe-bas de pulsation de coupure ω 0
ue e
t des
Micro
techn
40. Les variations avec la fréquence du module et de l’argument de la fonction de
transfert d’un filtre fondamental du second ordre sont représentées ci-dessous, à
l’échelle. Déterminer graphiquement : le transfert statique, la fréquence de
résonance, la bande passante à −3dB , la fréquence propre et la valeur de Q.
H
ϕ rad
f
e Mé
−2
caniq
−1
kHz
ure d
kHz
périe
f
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
41. Le même signal s (t ) périodique, dont le spectre des fréquences est donné figure 1,
est envoyé à l’entrée de trois quadripôles différents. On procède à l’analyse
spectrale du signal de sortie pour chacun. Quelles caractéristiques de chaque
quadripôle peut-on en déduire ?
1 2 3 4 5 6
f
f
kHz
1 2 3 4 5 6 kHz
f
1 2 3 4 5 6
fig. 2
f
1 2 3 4 5 6 kHz
kHz
fig. 4
fig. 3
59:1
fig. 1
Cn
Cn
Cn
6925
3002
4
Cn
ω
= 2,0 kHz , qu’obtient-on, de façon approchée, en
2π
.65.1
constante. On donne f =
55.1
42. On applique à l’entrée d’un filtre un signal u (t ) = u 0 + U m cos ( ω t ) , où u 0 est une
:196
sortie pour les filtres suivants :
2320
a) Un filtre passe-bas idéal de fréquence de coupure haute f h = 1,0 kHz ?
8891
b) Un filtre passe-bande du second ordre de fréquence de résonance f 0 = 2,5 kHz
et de facteur de qualité Q = 2 ?
582:
c) Un filtre passe-haut idéal de fréquence de coupure basse f b = 3,0 kHz ?
:211
0753
Mêmes questions si le signal appliqué à l’entrée est un signal carré alternatif de
période T ′ = 1,0. 10 − 3 s .
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
43. Le diagramme de Bode en amplitude d’un filtre est représenté ci-dessous, les
fréquences sont en kHz, l’échelle est logarithmique :
e Na
Écol
tiona
a) Quel est le gain maximal ?
b) Quelle est la bande passante à –3 dB ?
&KDSLWUH
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
6925
3002
4
c) Quelles sont les pentes des asymptotes ?
d) On envoie à l’entrée du filtre un signal carré alternatif de fréquence 3 kHz,
qu’obtient-on approximativement en sortie ? Ce signal de sortie peut-il être
considéré comme harmonique ?
55.1
59:1
44. Lors de l’étude du comportement en haute ou basse fréquence d’une impédance, on
est parfois conduit à négliger un imaginaire pur devant un réel, ou l’inverse. Justifier
la validité de ce calcul.
2320
:196
.65.1
45. Rechercher les ordres de grandeur des puissances mises en jeu dans un téléphone
portable, un néon, une ampoule, un téléviseur, un four à micro-ondes, un fer à
repasser, une machine à laver, …, une centrale électrique. Sachant que le prix du
kWh est d’environ 0,16 € TTC, estimer le coût horaire d’une télévision en marche.
0753
47. Sur quel principe fonctionne la réception d’un poste radio ?
582:
8891
46. Comment avec un dipôle RLC alimenté par une source de tension sinusoïdale de
12 V efficace, peut-on récupérer 60 V efficace aux bornes du condensateur (ou de
l’inductance) ? Expliquer en quoi ce résultat n’est pas en contradiction avec
l’équation de maille.
iques
:211
48. Quel est le principe d’un système antivol fréquent dans les grands magasins et qui,
s’il n’est pas désactivé, déclenche une alarme lors du passage par un portillon ?
Micro
techn
49. Un synthétiseur est un appareil produisant des sons à l’aide de circuits électriques.
Quel type de circuit faut-il choisir pour régler la hauteur, le timbre et l’intensité du
son ?
ue e
t des
50. Quels sont les principes de la compression MP3 utilisée pour que les fichiers
informatiques de musique soient jusqu’à dix fois moins volumineux que les fichiers
audio natifs (au format WAV par exemple) sans perte notable de qualité ? (penser à
utiliser un raisonnement spectral plutôt que temporel).
ure d
e Mé
caniq
51. Lors de l’étude de la résonance d’intensité, la bande passante est définie en
considérant une diminution de la réponse correspondant en amplitude à I maxi 2 .
Pourquoi ne pas avoir choisi plus simplement I maxi 2 ? À quel affaiblissement en
décibel cela correspond-il ?
1
, mais dont la
2
résonance est peu marquée (Q est faible), comment savoir si son comportement est
celui d’un passe-bas ou d’un passe-bande ?
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
52. Soit un filtre fondamental du second ordre à coefficient Q >
59:1
6925
3002
4
53. Soient H 1 ( jω ) et H 2 ( jω ) les fonctions de transfert complexes en tension, de deux
quadripôles, calculées dans les conditions
(1)
(2)
us
habituelles (voir la question 18.). On u e
réalise le montage en cascade ci-contre.
U
Dans quelles conditions a-t-on H ( jω ) = s = H 1 H 2 ? Pour répondre utiliser la
Ue
modélisation linéaire des amplificateurs vue à la question 25. ; les conditions portent
sur les résistances d’entrée et de sortie.
:196
.65.1
55.1
54. Comment obtenir de façon simple le diagramme de Bode asymptotique en
amplitude correspondant à une fonction de transfert écrite sous forme factorisée,
avec des termes du premier degré en jω ? Prendre par exemple :
1 + j ω ω1
.
( 1 + j ω ω 2 ) ( 1 + j ω ω3 )
8891
2320
55. Quelle est la relation entre les pentes des asymptotes, dans un diagramme de Bode
asymptotique en amplitude d’un quadripôle, et l’action de ce quadripôle sur la
tension d’entrée u e (t ) .
0753
582:
56. Quel lien formel existe-t-il entre le dénominateur de la fonction de transfert
complexe en tension et l’équation différentielle régissant l’évolution en régime
libre ? Illustrer avec par exemple le filtre fondamental du premier ordre.
techn
iques
:211
57. Fonction retard
On appelle fonction retard une fonction qui,
τ
s (t ) = e(t − τ )
à tout signal d’entrée e(t ) , associe un signal e(t )
de sortie s (t ) égal à e(t − τ ) quel que soit
Figure 1
t , où τ constant est le retard (Figure 1).
Pour une entrée sinusoïdale e(t ) = E m cos ( ω t ) , exprimer s(t ) , et donner la
ue e
t des
Micro
fonction de transfert complexe : F = S E . Que vaut le module de F ? Tracer
l’argument de F en fonction de la fréquence en échelle linéaire.
caniq
([HUFLFHV
e Mé
58. Détermination expérimentale d’une inductance
Pour déterminer l’inductance L d’une bobine (*) de résistance R = 9, 65 k Ω , on lui
associe en série une résistance R a = 10,0 k Ω . Les deux dipôles sont ensuite
périe
ure d
alimentés avec une source de tension sinusoïdale de fréquence f = 20,0 Hz . Un
voltmètre alternatif branché aux bornes de la résistance indique la valeur efficace
U R a = 3,17 V tandis qu’un autre branché sur la bobine donne U B = 8, 96 V .
e Na
Écol
tiona
le Su
Déterminer l’expression littérale de l’inductance L de la bobine. Faire l’application
numérique et comparer aux valeurs rencontrées en travaux pratiques.
&KDSLWUH
(*) Pour information, il s’agit d’une bobine de 33 cm de longueur comportant
régulièrement réparties et sur de nombreuses épaisseurs 127 000 spires .
582:
8891
2320
:196
.65.1
55.1
59:1
6925
3002
4
59. Filtre du second ordre
A
F
Un générateur de tension sinusoïdal, de
force électromotrice e(t ) = E 2 cos ( ω t )
R
R
us
et de résistance interne négligeable, alimente e(t )
C
C
un réseau constitué de deux condensateurs
identiques de capacité C et de deux
B
G
résistors identiques de résistance R
connectés suivant le schéma de la figure ci-contre.
On considère le quadripôle de bornes d’entrée A et B et de bornes de sortie F et G :
• Préciser les conditions d’étude d’un quadripôle.
• Prévoir sans calcul le comportement du quadripôle en haute et basse fréquence.
Us
• Établir, en fonction de R, C et ω , la fonction de transfert H ( jω ) =
.
E
H0
ω
, avec x =
• Montrer que H peut se mettre sous la forme
,
2
ω0
1 − x + jx / Q
exprimer H 0 , ω 0 et Q .
• Que représente H 0 ?
:211
0753
• Faire l’étude de H ( x) et tracer le graphe de H (ω ) . Retrouve-t-on le
comportement prévu au début ?
ue e
t des
Micro
techn
iques
60. Réalisation d’un teslamètre
Un champ magnétique se mesure en tesla (symbole T). Le capteur est appelé sonde
à effet Hall ; le constructeur donne la relation exprimant la tension de sortie U C du
capteur en fonction de la valeur du champ magnétique B :
U C = Vcc 2 + λ B avec λ = 13 V.T −1 et Vcc une tension positive constante.
On place une chaîne électronique en sortie de capteur afin d’obtenir une tension de
sortie U s proportionnelle à B : U s = K B avec K = 1,0.10 2 V.T −1
La chaîne est la suivante :
caniq
décaleur
capteur
suiveur
amplificateur
U3
Us
ure d
U2
e Mé
soustracteur
U1
périe
UC
le Su
Les fonctions réalisées par les divers éléments sont :
suiveur : amplificateur idéal délivrant u s (t ) = u e (t )
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
soustracteur : système à deux entrées e1 et e2 délivrant
u s (t ) =
R2
( e2 (t ) − e1 (t ) )
R1
6925
3002
4
§
R ·
amplificateur : quadripôle délivrant u s (t ) = ¨1 + 4 ¸ u e (t )
R5 ¹
©
§ R − R5 ·
décaleur : quadripôle délivrant u s (t ) = ¨ 6
¸ Vcc
© R 6 + R5 ¹
:196
.65.1
55.1
59:1
Les R k sont les résistances de résistors utilisés dans les divers éléments.
a) Quel est l’intérêt du montage suiveur ?
b) Quel est le rôle du décaleur ?
c) On désire avoir U 3 = U 2 − U 1 puis U s = K B . En déduire les valeurs des
R
R R
rapports 1 , 3 et 5 .
R2 R4
R6
:211
0753
582:
8891
2320
61. Étude et réalisation d’un filtre passe-bas
On veut réaliser un filtre de Butterworth d’ordre 3 défini par le module de sa
1
1
=
fonction de transfert en tension : H =
6
6
1+ ( x)
§ ω ·
1+¨
¸
© ω0 ¹
1
a) Montrer qu’une fonction de transfert : H =
�répond
2
1 + 2 j x + 2 ( j x ) + ( j x) 3
à la question.
techn
L2
C
R
ue e
t des
valeurs de L1 , L2 et C pour que ce filtre
soit un filtre de Butterworth d’ordre 3.
L1
Micro
c) On considère le quadripôle ci-contre :
Établir la fonction de transfert complexe en
tension.
ue
Calculer, en fonction de R et ω 0 , les
iques
b) Étudier et représenter le diagramme de Bode asymptotique en amplitude de cette
fonction de transfert.
Filtre
ordre 1
ure d
v2
Filtre
ordre 2
v3
périe
v1
e Mé
caniq
d) Justifier que l’on puisse réaliser, de façon théorique, le filtre de Butterworth
d’ordre 3 en associant en cascade un filtre fondamental d’ordre 1 et un filtre
fondamental d’ordre 2. Préciser la valeur du facteur de qualité du filtre d’ordre 2.
e Na
Écol
tiona
le Su
62. Couplage AC et DC d’une entrée d’oscilloscope
Lorsque l’on applique une tension u (t ) à l’entrée d’un oscilloscope, celle-ci est
envoyée à l’entrée d’un amplificateur dont on peut considérer l’impédance d’entrée
&KDSLWUH
us
comme constituée d’une association parallèle
conducteur ohmique de résistance R0 et
CD
condensateur de capacité C 0 .
59:1
6925
3002
4
u
R0
C0
ue
On prendra R0 = 1, 0 MΩ et C 0 = 13 pF .
De plus suivant le mode de couplage, u (t ) est
envoyée directement à l’entrée de l’amplificateur
vertical (mode DC) ou appliquée préalablement à un condensateur de capacité C D
(mode AC). En mode AC l’impédance d’entrée se présente donc sous la forme cicontre :
Ue
correspondant au couplage AC.
U
Simplifier H en considérant C D C 0 . Quelle est la nature du filtre ? Que vaut
la tension u ′e (t ) appliquée à l’entrée de l’amplificateur en couplage DC ?
:196
.65.1
55.1
a) Établir la fonction de transfert H ( jω ) =
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
b) Dans le but de déterminer expérimentalement la fréquence de coupure à −3 dB
du filtre constitué par le couplage AC et la valeur de C D , on réalise la
manipulation suivante : on applique la même tension sinusoïdale u (t ) sur l’entrée
1 (couplage DC) et sur l’entrée 2 (couplage AC) et on fait varier la fréquence de
u (t ) jusqu’à l’obtention de l’oscillogramme ci-dessous (celui-ci a été obtenu sur
un oscilloscope numérique donc à mémoire).
e Mé
caniq
Les amplifications verticales sont de 1 V/div. ; la base de temps de 20 ms/div.
Les voies 1 et 2 sont indiquées sur les courbes.
U
Mesurer 2 et ϕ 2 1 , que peut-on en conclure sur la valeur de la fréquence de
U1
u (t ) à cet instant ? En déduire la valeur C D , et vérifier l’hypothèse C D C 0 .
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
ure d
c) Le choix du couplage d’entrée AC peut donc perturber l’observation des signaux
basse fréquence. L’oscillogramme ci-dessous a été obtenu avec un signal carré
envoyé sur la voie 1 (couplage DC) et simultanément sur la voie 2 (couplage
AC) :
6925
3002
4
voie1
59:1
voie 2
:196
.65.1
55.1
Les amplifications verticales sont de 2 V/div. ; la base de temps de 100 ms/div.
Expliquer comment on peut interpréter la déformation observée avec le couplage
AC en termes de « dérivation » du signal carré u (t ) , d’abord à partir de
l’oscillogramme, puis de façon théorique à partir de la fonction de transfert
obtenue au a).
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
63. Analyseur de spectre (*)
Un analyseur permet de déterminer le spectre en fréquence d’une tension u (t ) de
1
fréquence f telle que f < f A =
. La mesure est effectuée sur une durée NT A
TA
avec N entier puissance de 2. Les fréquences du spectre de u (t ) sont alors
n
1
affichées sous la forme f mes =
avec n entier inférieur à N .
±
NT A T A
a) On fixe f A = 1 kHz , quelle est la valeur minimale de N permettant de mesurer
une fréquence de l’ordre de 0, 6 kHz à 1% près ? Quelle sera la durée minimale
de la mesure ?
b) En fait f A = (1000, 0 ± 0,1) Hz . Quelle valeur de N est-il inutile de dépasser
pour mesurer une fréquence de l’ordre de 0, 6 kHz ?
c) On garde la fréquence f A précédente et on fixe N = 210 . Pour une tension u 0 (t ) ,
on obtient cinq raies : n1 = 184, n 2 = 368, n3 = 553, n 4 = 739 et n5 = 924. Ces
mesures correspondent-elles à une décomposition en série de Fourier d’un signal
périodique ? Déterminer alors la fréquence du fondamental avec la précision
maximale.
d) Toujours avec les mêmes f A et N , on analyse la tension à la sortie d’un
multiplieur dont les entrées sont :
u1 (t ) = U 0 cos(2π f 1t ) et u 2 (t ) = U 0 (1 + cos (2π f 2t ) ) .
u 1 (t ) u 2 ( t )
, on mesure
U0
deux raies : n1 = 406 et n 2 = 742. Déterminer les fréquences f 1 et f 2 .
e Na
Écol
tiona
le Su
périe
ure d
Avec f 1 > f 2 . La tension de sortie, analysée, est : u (t ) =
&KDSLWUH
4XHVWLRQVRXYHUWHV
A
R1
B
L
6925
3002
4
64. Un dipôle résistif ? (*)
Le dipôle AB ci-contre est utilisé en régime
sinusoïdal forcé de pulsation ω .
À quelles conditions ce dipôle est-il équivalent à
une « résistance pure » quelle que soit la
fréquence d’utilisation ? Que vaut cette
résistance R ?
R2
59:1
C
i
L
2320
:196
.65.1
55.1
65. Régime sinusoïdal forcé… ou pas ?
On considère le circuit théorique ci-contre avec
u (t ) = U m cos(ω t ) , à t = 0 , on ferme l’interrupteur.
u
Étudier i (t ) , s’agit-il d’un RSF ?
Et avec u (t ) = U m sin(ω t ) ?
66. Identification (*)
Dans le réseau représenté ci-contre, on impose
u e (t ) = E 2 cos (ω t ) et on considère un régime
sinusoïdal forcé.
8891
u1
582:
R
ue
u2 R
0753
Sur le document ci-dessous sont représentées en
fonction du temps les tensions ue (t ) , u1 (t ) et
L
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
u2 (t ) . Le tracé est de type oscillogramme avec les amplifications 0,10 ms/div en
abscisse et 1, 0 V/div en ordonnée.
Donner les valeurs numériques de E , ω et du rapport L / R .
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
67. Le bon choix de filtre (*)
L’entrée n (t ) d’un filtre est composée de la superposition de deux tensions
sinusoïdales de fréquence f1 = 1, 0 MHz et f 2 = 20 GHz . On ne souhaite garder en
0753
582:
8891
2320
:196
.65.1
55.1
59:1
6925
3002
4
sortie u (t ) que le signal de fréquence f1 . Parmi les 6 filtres ci-dessous (d’ordre 1 ou
2), lequel est le mieux adapté à réaliser cette sélection ?
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
68. Étude expérimentale
On obtient, à quatre fréquences différentes, les oscillogrammes, en RSF, pour un
filtre du second ordre. La tension d’entrée est s1 (t ) et la tension de sortie s 2 (t ) .
Quelle est la nature du filtre et ses caractéristiques ?
&KDSLWUH
7UDYDX[SUDWLTXHV
6925
3002
4
69. Quel type de grandeur mesure un multimètre numérique en régime variable, s’il est
en mode DC ? en mode AC ? en mode AC+DC ?
Comment faut-il placer l’appareil dans un circuit électrique, s’il fonctionne en
voltmètre ? en ampèremètre ?
59:1
70. Sur un oscilloscope à deux voies on visualise deux tensions sinusoïdales de même
fréquence mais déphasées. Comment savoir laquelle est en avance ? Comment
procéder pour mesurer un déphasage avec un oscilloscope analogique ?
72. Un filtre passif fonctionne en sortie ouverte (courant de
sortie nul) en régime sinusoïdal.
ue
0753
techn
iques
6
:211
us en fonction du temps. Un fréquencemètre mesure
une fréquence de 652 Hz .
us
582:
On visualise sur un oscilloscope analogique la tension
d’entrée ue délivrée par un GBF, et la tension de sortie
S
8891
E
2320
:196
.65.1
55.1
71. Dans l’étude d’un dipôle RLC , le GBF sinusoïdal est branché sur la voie 1 et la
tension aux bornes de R sur la voie 2 d’un oscilloscope. En faisant varier la
fréquence, la tension crête à crête du générateur apparaît en gros constante, sauf
parfois autour de la résonance d’intensité où elle peut diminuer légèrement,
pourquoi ? Comment procéder alors pour déterminer correctement la bande
passante ?
4
Micro
y2
ue e
t des
2
0
temps
caniq
y1
e Mé
-2
-3
-2
périe
-4
-1
0
1
2
3
4
5
le Su
-6
-5
ure d
-4
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
On obtient le graphe de la figure ci-dessus. La tension d’entrée est sur la voie 1,
représentée sur l’écran par un trait plein, et la tension de sortie est sur la voie 2,
représentée sur l’écran par un trait pointillé. L’abscisse et l’ordonnée sont toutes
deux graduées en carreaux de l’oscilloscope.
L’amplificateur de la voie 1 est sur la position 10 mV/carreau et celui de la voie 2
sur la position 5 mV/carreau .
59:1
6925
3002
4
a) Représenter sur un schéma clair le circuit de branchement, en faisant figurer
l’oscilloscope, le GBF, le fréquencemètre, la masse du montage.
b) Mesurer sur le schéma (pour cette fréquence) le gain, puis le gain en décibels, et
l’avance de phase ϕ de la sortie par rapport à l’entrée. Préciser les incertitudes.
.65.1
55.1
73. Un filtre est alimenté par un GBF délivrant une tension sinusoïdale d’amplitude
constante. Comment procéder pour mesurer la (ou les) fréquence(s) de coupure à
−3 dB ?
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:196
74. On étudie en TP un filtre passe-bande du deuxième ordre en régime sinusoïdal, et on
observe simultanément à l’oscilloscope les tensions d’entrée et de sortie. Comment
repérer la fréquence de résonance, et comment la mesurer avec précision ?
&KDSLWUH
6925
3002
4
5pSRQVHVDX[TXHVWLRQV
/HFRXUVG·DERUG
55.1
59:1
5pJLPHYDULDEOH
2320
:196
.65.1
1 t +T
s (t )dt .
T ³t
Le signal est dit alternatif si sa valeur moyenne est nulle (ce qui ne signifie pas qu’il
soit sinusoïdal !). Il vient :
s(t ) = s 0 + s a (t )
1. La valeur moyenne de s (t ) périodique de période T est : s (t ) =
8891
avec s 0 valeur moyenne ou composante continue et s a (t ) composante alternative.
§ 1 t +T 2
·
s (t )dt ¸
=¨ ³
t
©T
¹
12
0753
s2
:211
S =
582:
2. La valeur efficace de s(t ) , périodique de période T , est la racine carrée de la valeur
moyenne du carré de s (t ) , soit :
iques
Si u (t ) = U m cos ( ω t ) , alternative sinusoïdale, un calcul simple donne :
ue e
t des
Micro
techn
t +T
1 t +T
1
1
cos 2 (ω t ) dt =
1 + cos(2ω t ) )dt =
(
(T + 0)
³
³
T t
2T t
2T
U
1
et U = m
soit u (t ) = U 2 cos ( ω t )
cos 2 ( ω t ) =
2
2
De façon générale :
s 2 = ( s 0 + s a ) 2 = s 02 + 2 s 0 s a + s a2 = s 02 + 0 + S a2
s 02 + S a2
caniq
S =
ure d
/HUpJLPHVLQXVRwGDOIRUFp QRWp56) e Mé
où S a est la valeur efficace de la composante alternative.
périe
3. À u (t ) = U m cos(ω t + ϕ ) = U 2 cos (ω t + ϕ ) on associe le complexe :
)
u = Um e (
= U m e jϕ e j ω t où j 2 = −1
Avec la correspondance module-amplitude et argument-phase instantanée.
L’amplitude complexe est : U m = U m e jϕ
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
j ω t +ϕ
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
car s 0 est constant et s a alternative, la valeur efficace S de s (t ) est donc :
jϕ
La valeur efficace complexe : U = U e
soit
u = U m e jω t
6925
3002
4
U est l’affixe d’un point M du plan complexe. (MPSI) Dans la construction de
JJJJG
Fresnel, on associe à U le vecteur OM .
k
k
k
8891
¦ ε Im ( u (t ) ) = 0 ; soit ¦ ε u (t ) = 0
k
k
k
k
k
582:
T
écriture à la date t +
:
4
¦ ε u (t ) = 0 ¦ ε u (t ) = 0 car la partie réelle d’un
k
k
k
k
k
k
0753
Réciproquement,
2320
:196
.65.1
55.1
59:1
4. Soit un réseau constitué de dipôles de type R, L ou C et un (ou plusieurs)
générateur(s) dont la grandeur de commande est une fonction sinusoïdale du temps
de pulsation ω (la même pour tous les générateurs). L’équation différentielle
régissant l’évolution est linéaire. Pour un réseau réel, la durée du régime transitoire
est limitée, en régime forcé toutes les grandeurs électriques sont des fonctions
sinusoïdales de pulsation ω , celle imposée par le générateur.
T
Si uk (t ) = U k 2 cos (ω t + ϕk ) à la date t, alors à la date t + ,
4
T ·
π
§
§
·
u k ¨ t + ¸ = U k 2 cos ¨ ω t + + ϕ k ¸ = −U 2 sin ( ω t + ϕ k )
4¹
2
©
©
¹
La loi des mailles ¦ ε k u k (t ) = 0 correspond à ¦ ε k Re ( u k (t ) ) = 0 et son
:211
complexe nul est nulle.
Les lois de Kirchhoff sont donc valables en RSF avec les représentants complexes.
techn
iques
5. Pour un dipôle linéaire en régime variable, avec les orientations ci-contre, on a en
RSF :
u = Z i ou U = Z I
ue e
t des
Micro
Pour une résistance, Z = R ; une bobine parfaite, Z = jLω ; un condensateur
1
parfait, Z =
jCω
§u·
arg( Z ) = arg ¨ ¸ est donc l’avance de phase de u (t ) sur i (t )
© i ¹
⊕
arg( jLω ) =
π
périe
le Su
tiona
e Na
Écol
ré f. p h a s e
in te n s ité
O
U L = Lω I
, aux bornes d’une bobine la tension
2
est en quadrature avance sur l’intensité.
UR = RI
ure d
e Mé
caniq
arg( R ) = 0 , car R est un réel positif, aux bornes
d’une résistance la tension est en phase avec
l’intensité.
O
⊕
ré f. p h a s e
in te n s ité
&KDSLWUH
⊕
§ 1 ·
π
aux
bornes
d’un
arg ¨
¸=− ,
2
© jCω ¹
condensateur la tension est en quadrature retard
sur l’intensité.
O
ré f. p h a s e
in te n s ité
6925
3002
4
1
UC =
I
Cω
du
= jω u , les équations de branches différentielles
dt
en régime variable, deviennent linéaires (au sens de la proportionnalité) en RSF à
condition d’utiliser les représentants complexes des grandeurs électriques.
La théorie des réseaux linéaires en régime continu (vue au chapitre 4) s’appuyait sur
les lois de Kirchhoff et la linéarité des équations de branches (relations affines entre
u et i ). Or en RSF les lois de Kirchhoff s’écrivent avec les complexes et les
équations de branches sont linéaires en représentation complexe.
Toutes les méthodes et théorèmes du continu s’appliquent en RSF à condition
d’utiliser les grandeurs complexes associées, notamment :
• lois d’associations d’impédances formellement identiques à celles des résistances
• diviseurs de tension et d’intensité
8891
2320
:196
.65.1
55.1
59:1
6. Grâce à des relations du type :
:211
0753
582:
7. La puissance instantanée reçue par le dipôle est :
p(t ) = u AB i AB = 2 U I cos ( ω t ) cos ( ω t − ϕ )
après avoir transformé le produit des cosinus en somme :
p(t ) = U I cos ϕ + U I cos ( 2ω t − ϕ )
iques
La valeur moyenne de cos ( 2ω t − ϕ ) , alternatif, étant nulle, la valeur moyenne P
de p (t ) est de façon évidente la composante continue : U I cos ϕ
techn
P = < u (t ) i (t ) > = U I cos ϕ
π
2
et P = 0 .
Pour un condensateur parfait, ϕ = −
π
e Mé
Pour une bobine parfaite, ϕ =
caniq
Pour un conducteur ohmique, ϕ = 0 et P = U I = RI 2 .
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
ure d
et P = 0 .
2
Seuls les conducteurs ohmiques reçoivent de la puissance en moyenne, qu’ils
dissipent par effet Joule. Alors que bobines et condensateurs parfaits alternent les
phases de fonctionnement récepteur et générateur et ne reçoivent aucune puissance
en moyenne.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
L’expression est générale, valable pour un dipôle passif ou actif.
U et I sont les valeurs efficaces, cos ϕ est appelé le facteur de puissance.
Le signe de ϕ n’intervient pas dans la valeur de P : ainsi elle ne dépend pas pour un
dipôle passif du fait qu’il soit inductif (l’intensité est en retard sur la tension soit
ϕ > 0 ou Im( Z ) > 0 ) ou capacitif (l’intensité est en avance sur la tension soit ϕ < 0
ou Im( Z ) < 0 ).
&RPSRVLWLRQVSHFWUDOHG·XQVLJQDOSpULRGLTXH
1
), peut se décomposer en :
T
6925
3002
4
8. Un signal s(t) périodique de période T (fréquence f =
∞
s (t ) = s 0 + ¦ [ An cos(n ω t ) + B n sin( n ω t )]
n =1
2π
T
59:1
avec : s0 valeur moyenne de s(t) et ω =
∞
s (t ) = s 0 + ¦ C n cos( n ω t + Φ n )
55.1
On peut aussi écrire
.65.1
n =1
Bn
An
Ceci en identifiant cos(n ω t + Φ n ) = cos Φ n cos n ω t − sin Φ n sin n ω t
An + Bn 2 et tan(Φ n ) = −
2320
:196
avec : C n =
2
Le terme C1 cos(ω t + Φ 1 ) est le fondamental du signal.
8891
Le terme C n cos(nω t + Φ n ) est l’harmonique de rang n.
iques
:211
0753
582:
Le spectre des fréquences est le graphe « bâtons » amplitude Cn en fonction de nω
ou de n. Il indique de façon claire la nature spectrale du signal : quels sont les
harmoniques qui le composent et leur importance relative.
Il ne suffit pas cependant pour décrire totalement le signal, notamment pour obtenir
le signal à partir de ses harmoniques (synthèse de Fourier) les phases à l’origine Φ n
sont nécessaires.
Micro
techn
9. Le signal harmonique est bien sûr son propre fondamental et la décomposition
spectrale ne comporte qu’un seul terme.
Dans la décomposition de s 2 (t ) = S m sin ω t , on voit plusieurs harmoniques
ue e
t des
d’amplitude décroissante avec le rang. Le traitement non linéaire de S m sin ω t
(application d’une valeur absolue) entraîne un enrichissement du spectre. La valeur
moyenne ou composante continue de s 2 (t ) n’a pas été représentée ici.
caniq
/HGLS{OH5/&VpULHHQUpJLPHVLQXVRwGDOIRUFp
e Mé
10. La tension aux bornes du conducteur ohmique, proportionnelle à l’intensité, permet
l’étude de i (t ) .
e Na
Écol
tiona
le Su
périe
ure d
11. On étudie la réponse en RSF en fonction de la pulsation ω (donc de la fréquence)
imposée par le générateur, ce qui conduit à parler de réponse fréquentielle.
Un diviseur de tension donne :
U
R
RI =U
et donc I =
1
R + j ( Lω − 1 Cω )
R + jLω +
jCω
&KDSLWUH
d’où I (ω ) =
U
( R + ( Lω − 1 Cω ) )
2
2
et
12
§u·
§ Lω − 1 Cω ·
¸ = arctan ¨
¸
R
©
¹
© i ¹
I
6925
3002
4
ϕ (ω ) = arg ¨
ϕ
I maxi
π /2
Δω
59:1
π /4
55.1
Δω
ω0
O
.65.1
I maxi
2
−π /2
2320
ω
ω0
O
ω
:196
−π /4
8891
La valeur efficace I passe par un maximum (phénomène de résonance) pour :
582:
ω = ω 0 = 1 / LC
iques
:211
0753
valeur pour laquelle le dénominateur, qui seul dépend de ω , est maximal (c’est la
somme de deux carrés dont un seul dépend de ω ).
Pour ω = ω 0 , pulsation propre, Z = R et Z est minimal rendant I maximal à U
constant.
techn
12. La bande passante est l’intervalle dans lequel l’intensité est supérieure à I maxi / 2
(la courbe est reproduite à la question précédente), soit Δω = ω 2 − ω1 , avec
2
2
=
U
2 R 2 = R 2 + ( Lω − 1 Cω ) 2
2R
−R + Δ
R+ Δ
et ω 2 =
2L
2L
périe
ω1 =
ure d
e Mé
caniq
d’où ( Lω − 1 Cω ) = ± R
On obtient deux équations du second degré ayant le même discriminant Δ :
Lω 2 + Rω − 1/ C = 0 et Lω 2 − Rω − 1/ C = 0
chacune n’admettant qu’une seule solution positive ayant un sens (le produit des
racines est négatif pour chaque équation)
Les solutions s’écrivent avec ω1 < ω2 :
R
L
le Su
Le facteur de qualité est :
Δω =
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
Q = ω 0 / Δω
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
( R + ( Lω − 1 Cω ) )
12
ue e
t des
U
Micro
ω1 et ω 2 solutions de :
La bande passante est d’autant plus étroite (filtre sélectif) que le facteur de qualité
est élevé.
Lω 0
R
1
1 L
=
RCω 0 R C
=
6925
3002
4
Q=
Pour le dipôle RLC série :
ϕ
RI
:211
Si ω > ω 0 alors I L ω >
ré f. p h a s e
in te n s ité
ue e
t des
Micro
O
I
Cω
iques
U
⊕
techn
Lω I
0753
582:
8891
2320
:196
.65.1
55.1
59:1
§u·
13. U = Z I arg Z = arg ¨ ¸ soit l’avance de phase de u (t ) sur i(t ) . Le graphe de
©i¹
ϕ (ω ) est représenté à la question 11..
On constate que ϕ = 0 (et Z = R ) à la résonance d’intensité ; la tension aux bornes
du condensateur compense alors exactement celle aux bornes de la bobine
( jLω0 − j / Cω0 = 0 , elles sont en opposition de phase entre elles) comme si le
générateur était uniquement branché sur la résistance, d’où le déphasage nul.
Dans la bande passante ϕ varie « vite » de −π / 4 (circuit capacitif) à +π / 4
(circuit inductif), ce qui représente la moitié de sa variation de ω → 0 ( ϕ = −π / 2 )
à ω → ∞ ( ϕ = +π / 2 ).
L’équation de maille R I + jLω I + I jCω = U s’écrit avec les valeurs
instantanées réelles :
π·
π·
I
§
§
cos ¨ ω t − ¸ = U cos(ω t + ϕ )
RI cos ω t + Lω I cos ¨ ω t + ¸ +
ω
2
2¹
C
©
¹
©
(MPSI) On peut représenter la somme des termes avec une construction de Fresnel :
I
et ϕ > 0
Cω
⊕
Lω I
RI
O
caniq
I
et ϕ < 0
Cω
U
I
Cω
ré f. p h a s e
in te n s ité
e Mé
Si ω < ω 0 alors I L ω <
ϕ
périe
ure d
Rq : Cette construction montre bien que l’équation de maille s’écrit avec les valeurs
efficaces complexes mais pas avec les modules : U ≠ RI + Lω I + I Cω .
e Na
Écol
tiona
le Su
14. On a avec un diviseur de tension :
UR
R
=
U
R + j ( Lω − 1/ Cω )
&KDSLWUH
en posant x =
ω
et en remplaçant avec Q = Lω0 / R = 1/ RCω0 :
ω0
6925
3002
4
UR
1
jx Q
=
=
U 1 + jQ ( x − 1 / x ) 1 − x 2 + jx Q
55.1
:196
.65.1
15. Comme précédemment :
UC ZC
1/ jCω
1
=
=
=
U
Z
R + j ( Lω − 1/ Cω ) jRCω − LCω 2 + 1
et sous forme canonique :
1
H ( jx ) =
2
1 − x + jx Q
59:1
Comme le montrent les graphes de la question 11., il s’agit d’un filtre passe-bande
de fréquence centrale réduite x = 1 , indépendante de Q, et de bande passante
réduite Δx = 1 / Q .
2320
En notant ψ l’avance de phase de uC sur u :
§ uC i ·
§ uC ·
§ uC ·
§u·
¸ = arg ¨
¸ = arg ¨
¸ − arg ¨ ¸
© u ¹
© i ¹
© i ¹
© i u ¹
0753
et puisque u C (t ) est en quadrature retard sur i (t )
π
2
montre que pour x = 1 , H est imaginaire d’argument
iques
−
1
1 − x + jx Q
2
ψ = −ϕ −
:211
Ce qui correspond bien au graphe de la question suivante.
16. H ( jx) =
582:
8891
ψ = arg H = arg ¨
π
2
2
12
2
périe
Sa dérivée s’annule pour x = 0 et pour x = x r = 1 − 1 2Q 2 si Q ≥ 1 /
2.
Pour Q ≤ 1/ 2 (amortissement important), H est une fonction décroissante de x : il
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
n’y a pas de résonance. La courbe pour Q = 1/ 2 est la courbe Q = 0, 7 du graphe
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
( (1 − x ) + x Q )
e Mé
1
2
ure d
17. H ( x) =
caniq
ue e
t des
Micro
techn
quelle que soit la valeur de Q.
2
De plus si Q est très grand pour x → 1 , le dénominateur de H tend vers 0, ce qui
correspond donc à la résonance.
1
calculée à la
Le graphe indique une résonance pour Q > 0, 7 (valeur théorique
2
question suivante). On a x r < 1 .
1
Pour x → ∞ , H ≈
qui tend vers 0 et est d’argument −π .
−x2
6925
3002
4
de la question précédente. En revanche, pour Q > 1/ 2 (amortissement faible), H
passe par un maximum.
Pour les grandes valeurs de Q, x r est proche de 1 ; quand Q diminue, x r tend vers
1
; ensuite il n’y a plus de maximum.
0, valeur qu’il atteint pour Q =
2
1
2
mais seulement si Q ≥
55.1
ω r = ω 0 1 − 1 / 2Q 2
59:1
Quand H est maximal, la valeur efficace U C est maximale et comme cette tension
est proportionnelle à la charge du condensateur, on parle de résonance de charge.
Elle se produit donc pour la pulsation :
:196
.65.1
ω r est d’autant plus proche de ω0 que Q est grand.
Pour ω = ω0 , H ( x = 1) = Q et la tension efficace aux bornes du condensateur vaut :
2320
U C = QU 0
0753
582:
8891
ce qui justifie pour Q > 1 la dénomination de facteur de surtension. Il faut bien se
rendre compte que la tension aux bornes du condensateur est alors supérieure à celle
délivrée par le générateur (voir aussi la question 46.).
La figure de droite donne la courbe pour Q = 2 ; la résonance de tension (le
maximum) est obtenu pour xr < 1 , et pour x = 1 (résonance d’intensité), on a bien
:211
UC / U = 2 .
iques
)LOWUHV
Micro
techn
18. Un quadripôle est un élément à quatre bornes, en général associé à deux dipôles :
générateur de commande à l’entrée et dipôle utilisation (qualifié parfois de « dipôle
charge ») en sortie :
ie
is
commande
us
quadripôle
ue e
t des
ue
utilisation
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
On rencontre aussi, en électronique, une orientation de i s dans l’autre sens (vers le
quadripôle).
Si le quadripôle et les dipôles associés sont linéaires, un générateur sinusoïdal
impose un régime forcé sinusoïdal.
X
Une fonction de transfert est définie par : H ( jω ) = s où X s et X e sont les
Xe
valeurs efficaces complexes de grandeurs de sortie et d’entrée. On utilise le plus
U
souvent la fonction de transfert complexe en tension H ( jω ) = s .
Ue
&KDSLWUH
6925
3002
4
L’étude en RSF apparaît comme fondamentale car :
la réponse à une somme de fonctions est la somme des réponses (système
linéaire)
une fonction périodique peut se décomposer en une somme de fonctions
sinusoïdales (décomposition en série de Fourier)
55.1
59:1
Le problème de la fonction de transfert est qu’elle dépend des dipôles associés et
elle perd donc tout intérêt si elle n’est pas caractéristique du quadripôle. Or si le
dipôle de commande à l’entrée est une source idéale de tension, par exemple, et si la
sortie est ouverte, alors la fonction de transfert est caractéristique du quadripôle seul.
La condition sortie ouverte qui paraît très restrictive est en fait assez souvent
réalisée : il suffit que l’impédance du dipôle utilisation soit assez grande devant
l’impédance de sortie du quadripôle (voir aussi la question 53.)
SIGNIFIE
ZA
ue
us
ZB
8891
B
us
2320
A
ue
:196
.65.1
Tout ceci est sous-entendu dans une question du type : « Étudier le quadripôle
suivant » suivie du schéma, qu’il faut donc interpréter de la façon suivante :
is = 0
582:
u e (t ) sinusoïdale et RSF
:211
)
iques
(
0753
19. Un diagramme de Bode est constitué de deux courbes, représentant en fonction du
logarithme décimal de la pulsation (ou de la fréquence) :
§U ·
• le gain en décibel défini par GdB (ω ) = 20 log H ( jω ) = 20 log ¨ s ¸ ,
© Ue ¹
techn
• l’argument ϕ (ω ) = arg ( H ( jω ) ) = ϕ s − ϕe .
* Exemple simple de réalisation :
1
1 + j RCω
1
Et par identification : H 0 = 1 ; ω 0 =
RC
H0
1 + jx
R
ue
C
us
ure d
e Mé
caniq
Il vient par diviseur de tension H =
H =
ue e
t des
20. La fonction de transfert complexe en tension est :
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
* En BF ( x → 0 ou plus correctement ω ω 0 ), H → H 0 ; H 0 est le transfert
statique.
En HF ( x → +∞ ou plus correctement ω ω 0 ), H → 0
On retrouve ce comportement par analyse directe de l’exemple :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
L’emploi d’une échelle logarithmique permet de décrire le comportement du
système sur de grands intervalles de fréquence et de définir des diagrammes dits
« asymptotiques », voir par exemple la question 20.
R
u s = ue
BF
* H ( x) =
H0
1 + x2
us = 0
ue
HF
6925
3002
4
R
ue
est une fonction décroissante de x : c’est un filtre passe-bas.
H0
H0
soit x h = 1
2
1+ x
arg ( H ) = − arctan x si H 0 > 0 et arg ( H ) = π − arctan x si H 0 < 0
=
59:1
2
55.1
La coupure haute se fait pour
arg( H )
O
xh
H0
−
8891
4
π
2
x
xh
:211
O
π
582:
−
0753
2
x
2320
H0
:196
H
.65.1
u s (t ) est en retard sur u e (t ) dans le cas H 0 > 0 (cas du graphe ci-dessous)
iques
* Étude asymptotique, on prend H 0 = 1 :
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
§
·
1
2
G dB = 20 log ¨
¸ = −10 log ( 1 + x )
2
© 1+ x ¹
x 1 G dB = 0 , asymptote horizontale
x 1 G dB = −20 log x , asymptote de pente −20 dB/décade passant par le
point (1,0)
Rq : Pour x = xh = 1 , la diminution en décibels à la fréquence de coupure par
rapport au maximum correspond à :
&KDSLWUH
ΔGdB = 20 log H ( xh ) − 20 log H (0) = 20 log
H ( xh )
1
= 20 log
= −10 log 2 ≈ − 3dB
H0
2
G dB
6925
3002
4
x
éch. log
1
jx
1 + jx
:196
H =K
21. La fonction de transfert complexe en tension est :
.65.1
55.1
59:1
−20 dB/décade
j RCω
1 + j RCω
ue
1
Et par identification : K = 1 ; ω 0 =
RC
* En BF ( x → 0 ou plus correctement ω ω 0 ), H → 0
2320
* Exemple simple de réalisation :
Il vient par diviseur de tension H =
R
us
0753
582:
8891
C
us = 0
ue
π
u s = ue
HF
est une fonction croissante de x : c’est un filtre passe-haut.
La coupure basse se fait pour
arg ( H ) =
R
K x
1 + x2
K
=
2
soit
− arctan x si K > 0 et arg ( H ) = −
xb = 1
π
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
ure d
e Mé
− arctan x si K < 0
2
2
u s (t ) est en avance sur u e (t ) dans le cas K > 0 (cas du graphe ci-dessous)
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
1 + x2
ue e
t des
K x
caniq
* H ( x) =
Micro
BF
techn
R
ue
iques
:211
En HF ( x → +∞ ou plus correctement ω ω 0 ), H → K
On retrouve ce comportement par analyse directe de l’exemple :
H
arg( H )
K
π
2
6925
3002
4
2
K
π
x
xb
xb
O
55.1
O
59:1
4
x
8891
2320
:196
.65.1
* Étude asymptotique, on prend K = 1 :
§
·
x
2
G dB = 20 log ¨
¸ = 20 log( x) − 10 log ( 1 + x )
2
© 1+ x ¹
x 1 G dB = 20 log x , asymptote de pente +20 dB/décade passant par le
point (1,0)
x 1 G dB = 0 , asymptote horizontale
582:
G dB
x
éch. log
0753
1
Micro
techn
iques
:211
+20 dB/décade
ω2
;
ω 02
caniq
ce qui fixe ω 0 et x , avec le terme en ω 2 : x 2 =
ue e
t des
22. Le dénominateur de la fonction de transfert est un polynôme du second degré en
§
·
a
a
jω , il s’écrit : a 0 + a1 jω + a 2 ( jω ) 2 = a 0 ¨ 1 + 1 jω − 2 ω 2 ¸
a0
a0
©
¹
e Na
Écol
tiona
le Su
périe
ure d
e Mé
§
·
§
·
a
jx
puis : a 0 ¨ 1 + 1 jω − x 2 ¸ = a 0 ¨ 1 +
− x 2 ¸ ce qui fixe Q avec le terme en jω
a0
Q
©
¹
©
¹
compte tenu de la valeur de ω 0 . Le coefficient a 0 fait alors partie de la constante
multiplicative.
N
La fonction de transfert s’écrit H = , N et D sont des polynômes en jω .
D
&KDSLWUH
23. La fonction de transfert complexe en tension est :
H =
H0
1 − x2 +
jx
Q
8891
2320
:196
.65.1
55.1
59:1
6925
3002
4
* Exemple simple de réalisation :
Il vient par diviseur de tension
L
R
1
ue
us
C
H =
1 − LCω 2 + j RC ω
Et par identification (dans l’ordre !) :
1
1
ω 02 =
;Q=
; H0 = 1
RCω 0
LC
* Tous les résultats sur la résonance de charge s’appliquent ici (voir les questions
15. à 17.).
1
et le
Le filtre est un passe-bas, mais il existe un maximum de H(x) pour Q >
2
1
1
. Pour Q =
on a un
comportement est celui d’un passe-bande si Q 2
2
filtre de Butterworth d’ordre 2.
582:
* H ( x) et arg H (pour H 0 > 0 ) sont représentés ci-dessous pour les valeurs
arg H
2
caniq
−π
x
e Mé
1
* Étude asymptotique, on prend H 0 = 1 :
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
ure d
2
§
x2 ·
G dB = 20 log ( H ( x) ) = −10 log ¨ ( 1 − x 2 ) + 2 ¸
Q ¹
©
x → 0 G dB = 0 , asymptote horizontale
x → ∞ G dB = − 40 log x , asymptote de pente − 40 dB/décade passant par le
point (1,0)
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
π
H0
O
x
ue e
t des
−
1
Micro
O
techn
H
iques
:211
0753
4, 1, 1 2 et 0, 5 de Q. H 0 représente le transfert statique.
Le maximum de H ( x) est atteint pour
1
x r = 1 − 1 2Q 2 si Q >
et x r → 1 si Q 1
2
On retrouve les asymptotes du diagramme proposé.
Les diagrammes réels pour les valeurs de Q égales à : 4, 1, 1
placés sur le diagramme asymptotique.
2 et 0, 5 ont été
1
, on a un passe-bas avec une meilleure coupure en haute fréquence
2
( − 40 dB/décade ) que le passe-bas du premier ordre ( −20 dB/décade ).
§ 1 ·
1
, en remarquant que G dB ( x = 1) = −20 log ¨ ¸ = 20 log Q :
2
©Q¹
59:1
Pour Q >
6925
3002
4
Pour Q ≤
55.1
< si Q > 1 alors G dB ( x = 1) > 0 et la courbe est au-dessus de l’asymptote,
jx Q
:196
H =K
1 − x2 +
2320
24. La fonction de transfert complexe en tension est :
.65.1
< si Q < 1 alors G dB ( x = 1) < 0 et la courbe est en dessous de l’asymptote.
jx
Q
0753
K
1·
§
1 + jQ ¨ x − ¸
x¹
©
:211
H =
582:
8891
Mais pour l’étude mathématique, il est préférable d’utiliser l’expression obtenue en
divisant numérateur et dénominateur par jx Q :
L
R
us
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
* Exemple simple de réalisation :
Il vient par diviseur de tension
C
j RC ω
ue
H =
2
1 − LCω + j RC ω
Et par identification :
1
1
ω 02 =
;Q=
; K =1
RCω 0
LC
* Tous les résultats sur la résonance
H
d’intensité s’appliquent ici (voir les
questions 11. à 14.).
Le filtre est un passe-bande. Quelle que K
soit la valeur de Q, il existe un
maximum de H(x) atteint pour x = 1
soit ω = ω 0 .
H ( x) est représenté ci-contre pour une
valeur quelconque de Q.
périe
H max = K est atteint pour x r = 1
arg ( H ( jx) ) = arg( R i ) − arg(u e ) = −ϕ u e i
tiona
e Na
Écol
le Su
et ϕ u e i a été tracé à la question 11.
x
1
&KDSLWUH
* Étude asymptotique, on prend K = 1 :
6925
3002
4
2
§
1· ·
§
G dB = 20 log ( H ( x) ) = −10 log ¨ 1 + Q 2 ¨ x − ¸ ¸
¨
x ¹ ¸¹
©
©
x → 0 G dB = 20 log x − 20 log Q , asymptote de pente +20 dB/décade
x → ∞ G dB = −20 log x − 20 log Q , asymptote de pente −20 dB/décade
Le point de croisement des asymptotes est ( x = 1 , G dB = −20 log Q )
59:1
Le diagramme asymptotique avec Q > 1 :
G dB
55.1
x
1
8891
2320
:196
−20 dB/décade
+20 dB/décade
.65.1
éch. log
−20 log Q
iques
:211
0753
582:
Pour les diagrammes réels on distingue les cas :
Q > 1 : résonance aiguë, filtre sélectif, G dB max est au-dessus du point de
croisement des asymptotes (graphe de gauche de l’énoncé).
Q < 1 : résonance floue, filtre peu sélectif, G dB max est en dessous du point de
croisement et on peut affiner le diagramme asymptotique (graphe de
droite de l’énoncé).
Micro
techn
25. Un quadripôle amplificateur est linéaire si u s = A u e en sortie ouverte. Une
description simple de ce comportement est la modélisation :
Zs
ue e
t des
Ze
Aue
us
Zu
caniq
ue
is
amplificateur
e Mé
Ce modèle respecte bien u s = A u e en sortie ouverte ( i s = 0 ). La sortie se
ure d
comporte comme un générateur de Thévenin de fém A u e , commandée par u e .
Z e est l’impédance d’entrée, Z s l’impédance de sortie. Le plus souvent on les
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
choisit purement résistives. Z s résistive se mesure par la méthode de la résistance
adaptée, voir la question 77. du chapitre 4.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ie
L’amplificateur est actif si la puissance en sortie est supérieure à celle en entrée, ce
comportement est différent de celui des quadripôles formés d’éléments passifs qui
sont plutôt qualifiés de filtres (passifs).
Ze → ∞
et
6929
5440
6
Zs = 0
L’amplificateur est idéal si :
$SSOLFDWLRQVGLUHFWHVGXFRXUV
26. La solution géométrique est évidente : i = I 0 2
.65.2
07:1
5pJLPHYDULDEOH
I0
.179
I0 2
2320
De même : u1 = 0 et u 2 = U 0
Les valeurs efficaces s’obtiennent avec :
u12 = U 02 = cste U 1 = U 0
:160
i
U2 =
2U 0
582:
Or u 2 = U 0 + u1 , on retrouve bien U 2 = U 02 + U 12 =
0753
2U 0 .
:211
/HUpJLPHVLQXVRwGDOIRUFp QRWp56) R
R + r + jr RC ω
Micro
U = E
iques
Z
R jCω
R
et Z =
=
Z+r
R + 1 jC ω 1 + j RCω
techn
27. Avec un diviseur : U = E
u 22 = 2U 02 et
8891
u 22 vaut 4U 02 sur une demi-période et 0 sur la suivante :
t
ue e
t des
On revient aux réels avec module et argument :
R
U =E
2
2
( R + r ) + ( r RCω )
§u·
§ RrCω ·
¸ = − arg ( R + r + j RC ω ) = − arctan ¨
¸
© R+r ¹
©e¹
caniq
ϕ = arg ¨
e Mé
u (t ) = U 2 cos ( ω t + ϕ )
28. a) RC série
ure d
§
1 ·
R 2 + (1 Cω ) 2 ; arg Z = arctan ¨ −
¸
© RCω ¹
1
1
ou BF Z → ∞ comme
* ω → 0 signifie ω RC
jCω
périe
1
; Z =
jC ω
e Na
Écol
tiona
le Su
* Z =R+
&KDSLWUH
1
ou HF Z → R
RC
* Prévision avec les comportements en BF et HF des dipôles :
BF
HF
6929
5440
6
ω → ∞ signifie ω .65.2
07:1
* AN : R = 100 Ω ; 1 C ω = 3,2 kΩ , donc, à cette fréquence on est en BF :
1
π
Z =
; Z = 3, 2 kΩ et arg Z = −
jCω
2
b) RL parallèle
RLω
R + ( Lω )
2
; arg Z =
2
π
§ Lω ·
− arctan ¨
¸
2
© R ¹
.179
j RLω
; Z =
R + j Lω
:160
* Z =
R
ou BF Z → 0 comme j Lω
L
R
ω → ∞ signifie ω ou HF Z → R
L
* Prévision avec les comportements en BF et HF des dipôles :
0753
582:
8891
2320
* ω → 0 signifie ω HF
:211
BF
techn
iques
* AN : R = 100 Ω ; Lω = 31 Ω donc pas d’approximation possible :
π
§ 31 ·
Z = 30 Ω et arg Z = − arctan ¨
¸ = 1, 3 rad
2
© 100 ¹
§
·
Lω
¸
; arg Z = arctan ¨
¨ R ( 1 − LC ω 2 ) ¸
©
¹
( Lω ) 2
( 1 − LCω )
2
2
e Mé
caniq
* ω → 0 signifie BF Z → R
ω → ∞ signifie HF Z → R
HF
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
BF
périe
ure d
* Prévision avec les comportements en BF et HF des dipôles :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
R2 +
ue e
t des
Z =
Micro
c) LC parallèle en série avec R
j Lω
* Z =R+
;
1 − LC ω 2
* AN : R = 100 Ω ; Lω = 31 Ω ; 1 C ω = 3, 2 kΩ
6929
5440
6
donc LCω 2 1 mais R et Lω sont du même ordre : RL série
§ Lω ·
Z = R 2 + ( Lω ) 2 = 105 Ω et arg Z = arctan ¨
¸ = 0, 30 rad
© R ¹
courant dans la bobine i (t = 0) = 0 d’où le résultat :
0753
i (t ) = I 2 ( cos(ω t − ϕ ) − cos ϕ e − t /τ )
582:
8891
2320
:160
.179
.65.2
07:1
29. Établissement du courant dans un dipôle rL
di
L’équation différentielle est L + ri = v(t ) .
dt
Le régime forcé à la pulsation ω de la source est une solution particulière de
l’équation, obtenue facilement en passant en notation complexe :
V
V 2 e jωt
Lω
ip =
≡ I 2 e jωt e − jϕ I =
et tan ϕ =
>0
2
2
2
r + jLω
r
r +Lω
montrant que l’intensité dans l’inductance est bien en retard sur la tension imposée.
di
Le régime libre est la solution générale de l’équation homogène L + ri = 0 soit :
dt
i1 (t ) = C e− t /τ
La constante C ne peut se déterminer que sur la solution générale du régime
transitoire i (t ) = i p (t ) + i1 (t ) par la condition initiale de continuité de l’intensité du
:211
Au bout d’un temps de l’ordre de quelques τ , la partie i1 (t ) aura disparu et il ne
techn
30. Pont de Maxwell
Z d n’est pas infinie, donc à l’équilibre V A − V B = 0 .
iques
restera que le régime permanent forcé i p (t ) .
Micro
Le pont étant équilibré, i1 = 0 donc les impédances Z 1 et Z 2 sont en série, ainsi que
caniq
soit avec V A = V B et E ≠ 0 : Z 1 Z 3 = Z 2 Z 4
ue e
t des
Z 3 et Z 4 . Par divisions de tension il vient :
Z1
Z4
VC − V A = E
et V C − V B = E
Z1 + Z 2
Z3 + Z4
e Na
Écol
tiona
le Su
périe
ure d
e Mé
Cette condition n’est pas suffisante, il faut Z 1 + Z 2 ≠ 0 et Z 3 + Z 4 ≠ 0 ; en effet
ces sommes peuvent être nulles dans le cas où les impédances sont des imaginaires
purs.
R3
= R 2 R 4 , ne
Exemple : La condition d’équilibre donne ( R1 + j L1 ω )
1 + j R3 C 3 ω
surtout pas multiplier par l’expression conjuguée, mais écrire :
R2 R4
R1 + j L1ω =
( 1 + j R3 C 3 ω ) et égaler parties réelles et parties imaginaires :
R3
&KDSLWUH
R1 =
R 2 R4
R3
L1 = R 2 R 4 C 3
et
Pour les mesures de R1 et L1 , il faut d’abord équilibrer le pont en continu (équilibre
6929
5440
6
indépendant de L1 dans ce cas) en réglant R 2 à R3 et R 4 connus ; puis en RSF
régler la valeur C 3 pour rendre i1 le plus petit possible, on en déduit L1 .
07:1
31. Étude expérimentale d’un amplificateur
R
R
A E et en valeurs efficaces : U s =
Avec un diviseur : U s =
AE ,
R + Zs
R + Zs
2320
:160
.179
.65.2
A est réel. Pour que U s soit indépendant de ω il faut que Z s soit réel.
La méthode utilisée est du même type que celle de la résistance adaptée vue à la
question 77. du chapitre 4. Numériquement :
­°16.10 −3 A = 0, 67 (16 + Z s )
A = 1, 0.10 3 et Z s = 8, 0 Ω
®
−3
°̄8.10 A = 0, 50 ( 8 + Z s )
U s2
A2 E 2 R
=
, le calcul est
2
R
(R + Zs )
8891
La puissance moyenne reçue par R est P = RI 2 =
:211
0753
582:
celui de l’adaptation d’impédance vue à la question 23. du chapitre 4. P est
maximale pour :
R = Zs
techn
Cn
E1
ue e
t des
E1 3
E1 5
Micro
E
n
caniq
1
3
5
7
9
Si la composante alternative s a (t ) = s (t ) − s 0 est paire, alors s a (−t ) = s a (t ) . C’est
ne comporte
périe
s a (t ) − s a (−t ) = 2 s a (t )
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
s a (−t ) = − s a (t ) . Alors la différence
évidemment que des termes en sinus.
ure d
e Mé
le cas proposé dans l’énoncé. Alors la somme s a (t ) + s a (−t ) = 2 s a (t ) ne comporte
évidemment que des termes en cosinus, les termes en sinus de signes opposés
s’annulent.
De la même façon, si la composante alternative s a (t ) = s (t ) − s 0 est impaire, alors
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
32. La valeur moyenne est E , en notant E1
l’amplitude du fondamental de fréquence
f 1 , l’amplitude de l’harmonique de rang
E
3, de fréquence 3 f 1 , est 1 .
3
iques
&RPSRVLWLRQVSHFWUDOHG·XQVLJQDOSpULRGLTXH
/HGLS{OH5/&VpULHHQUpJLPHVLQXVRwGDOIRUFp
6929
5440
6
33. L’intensité efficace est la même pour les fréquences f1 et f 2 ; il en est donc de
même des modules de l’impédance :
( Lω1 − 1/ Cω1 ) 2 = ( Lω2 − 1/ Cω2 ) 2 ( Lω1 − 1/ Cω1 ) = − ( Lω2 − 1/ Cω2 )
(l’autre solution avec un signe + correspond à la même fréquence)
1§ 1
1 ·
f 0 = f1 f 2
alors L (ω1 + ω2 ) = ¨ + ¸ LCω1ω2 = 1 d’où le résultat
C © ω1 ω2 ¹
.65.2
07:1
Rq : Ce résultat peut aussi être établi en formant le produit ω1ω2 (voir question 12.).
.179
34. [ f1 , f 2 ] est à peu près la bande passante puisque l’intensité pour f1 et f 2 est réduite
2320
:160
d’un facteur de l’ordre de 2 sur celle de f 0 . On peut alors obtenir des valeurs
approchées pour les composants du circuit.
La fréquence de résonance est alors donnée par la relation f 0 ≈ f1 f 2 ≈ 10 kHz .
Le facteur de qualité est défini par Q = f 0 / Δf ≈ 1, 6 .
8891
La résistance est donnée (à la résonance) : R = E / I maxi ≈ 1, 0.102 Ω car E = 71 V .
582:
L’inductance par L = RQ / ω0 ≈ 2,5 mH et la capacité par C = 1/ Lω02 ≈ 0,10 ȝF .
:211
0753
Les tensions efficaces aux bornes de L et C sont égales à la résonance et valent
U L ,C = I maxi / Cω0 = Lω0 I maxi = QE ≈ 1,1.10 2 V .
iques
)LOWUHV
Z
j L ω jCω
j Lω
et Z =
=
R+Z
j L ω + 1 jCω 1 − LC ω 2
j Lω / R
1 − LCω 2 + j L ω R
ue e
t des
H =
Micro
a) H =
techn
35. Se servir dans chaque cas d’un diviseur de tension :
ure d
Z′
R jC ω
R
=
et Z ′ =
Z ′ + j Lω
R + 1 jCω 1 + j RCω
1
1 − LCω + j L ω R
2
le Su
H =
périe
b) H =
e Mé
caniq
C’est un passe-bande du second ordre.
1
R
; Q=
; K =1
L’identification donne : ω 02 =
Lω 0
LC
On remarque qu’ici Q augmente quand R augmente, le dipôle n’est pas un RLC
série.
e Na
Écol
tiona
C’est un fondamental du second ordre.
&KDSLWUH
L’identification donne : ω 02 =
L 2C Q = 1
2 ; filtre de Butterworth d’ordre 2.
6929
5440
6
R=
1
R
; Q=
; H0 = 1
Lω 0
LC
07:1
36. a) C’est un passe-bas du premier ordre.
b) G dB max = 20 log H max = 20 log H 0 = 20 log 2 = 6 dB
ω
1
c) f c = c =
2π
2πτ
.179
:160
37. On est en basses fréquences pour RCω 1 et LCω 2 1
en BF
.65.2
§ us ·
ª πº
= π − arctan ( ωτ ) > 0 car arctan ( ωτ ) ∈ « 0 , »
d) arg ¨
¸
¨ ue ¸
2¼
¬
©
¹
R
i
582:
R
2R
U1
0753
U 2 = U1
i
R
U 2 = U1
R
2R
R
u1
iques
R
i
techn
i
Micro
U2
1
=
U1
2
R
ure d
e Mé
caniq
ue e
t des
38. La caractéristique du réseau dipolaire linéaire ci-contre, a
été étudié à la question 40. du chapitre 4. Il se comporte u
e
comme une source de tension de fém u e ( t ) 2 et de
résistance interne R 2 .
R
Le circuit est donc un RLC série de résistance
2
ue
Lω 0
; donc Q =
commandé par la tension
= 2.
R 2
2
2 , u s (t ) passe
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
Le filtre est un fondamental du second ordre de coefficient Q > 1
par un maximum ; proposition d).
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
U1
Dans les deux cas :
R
R
:211
R
8891
2320
en HF
1
2
§ ω ·
ω
1− ¨
¸ + 2j
ω0
© ω0 ¹
coefficient Q inférieur à 1
donc Q =
1
c’est un fondamental du second ordre de
2
2 . La coupure se produit pour
xc =
2 −1
1
1
=
soit
1 + x2
2
6929
5440
6
39. H =
proposition d).
H
ϕ
rad
.65.2
≈ −1, 6 rad donne f 0 = 2, 0 kHz .
.179
2
f
:160
π
kHz
2320
donne H 0 = 2, 0 . La valeur −
07:1
40. L’argument entre 0 et −π indique un transfert statique positif et le graphe H ( f )
−1
8891
−1, 6
582:
−2
0753
kHz
:211
f
On reporte f 0 sur le graphe H ( f ) qui donne Q H 0 ≈ 3, 0 (voir la question 17.),
ue e
t des
Micro
techn
iques
soit Q ≈ 1,5 . On lit d’autre part la fréquence de résonance f r ≈ 1, 7 kHz ,
H max
et la bande passante Δf ≈ 1,5 kHz . On remarque
H max ≈ 3,3 , on en déduit
2
f
que la bande passante ne correspond pas ici précisément à 0 , car Q est faible, la
Q
résonance floue et la courbe n’est pas symétrique de part et d’autre de f 0 .
ure d
e Mé
caniq
41. Le quadripôle 1 coupe les fréquences élevées de s (t ) sans modifier les valeurs des
fréquences basses, c’est un filtre linéaire passe-bas. Il n’est pas idéal car il modifie
les valeurs relatives des amplitudes.
Le quadripôle 2 laisse passer une bande de fréquences présente dans s(t ) , c’est un
filtre passe-bande. Il est sans doute idéal car il ne modifie pas les valeurs relatives
des amplitudes.
Le quadripôle 3 fait apparaître de nouvelles fréquences, il enrichit le spectre. C’est
un système non linéaire.
e Na
Écol
tiona
le Su
périe
42. a) Le filtre est idéal, f est coupée et u 0 passe. La sortie est continue : u s = u 0 .
Ce filtre permet d’extraire la valeur moyenne du signal s (t ) .
&KDSLWUH
f0
≈ 1, 25 kHz soit f b ≈ 1,9 kHz et f h ≈ 3,1 kHz . Donc la composante
Q
continue est coupée, la composante alternative sinusoïdale passe (avec une
atténuation de l’ordre de 1 2 ). La sortie est sinusoïdale de fréquence f.
c) Passe-haut idéal, f et u 0 sont coupées, u s = 0 .
6929
5440
6
b) Δf =
07:1
Le signal est carré de fréquence f ′ = 1,0 kHz , le spectre contient les fréquences
f ′, 3 f ′, 5 f ′, .... :
a) u s (t ) est sinusoïdale de fréquence f ′ .
.65.2
b) Δf = [ 1,9 kHz , 3,1 kHz ] u s (t ) est sinusoïdale de fréquence 3 f ′ .
.179
c) Le fondamental seul est coupé u s (t ) est un carré moins le fondamental, ce
qui ne donne rien de reconnaissable.
:160
43. Mesurer sur le graphe :
a) G dB max = −5 dB
2320
b) Δf = [ 5 kHz , 12 kHz ] mesures faites à −8 dB
0753
582:
8891
c) Les pentes sont d’environ + 60 dB/décade et − 60 dB/décade
d) Seul l’harmonique de fréquence 9 kHz passe, on obtient le signal sinusoïdal
correspondant en sortie, quasi harmonique car la forme de la courbe donne une
forte atténuation en dehors de la bande passante.
iques
:211
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
a 2 + b 2 e jϕ et ϕ = arctan
techn
44. Soit z = a + jb , avec a et b positifs, z =
b
a
périe
ure d
e Mé
45. Pour un téléphone portable P ≈ 2 W ; un néon P = 10 à 40 W ; une ampoule
électrique P = 25 à 75 W ; un téléviseur P ≈ 50 à 100 W ; un four à micro-ondes
P ≈ 800 W , un fer à repasser P ≈ 1 kW , une machine à laver P ≈ 3 kW ; une
centrale électrique P ≈ 1 GW .
Une émission de 1 h revient à environ 0,02 € (2 centimes d’euro !).
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
46. Il faut d’abord fixer la fréquence du générateur sinusoïdal à la fréquence de
résonance du dipôle RLC ; un facteur de qualité Q = 5 explique alors la surtension
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
Micro
­ a2 + b2 → b
°
a + jb → jb
Si b a
®
π
°ϕ →
2
¯
­° a 2 + b 2 → a
a + jb → a
Si b a
®
°̄ ϕ → 0
Les calculs de limites peuvent être conduits dans les expressions complexes sans
distinguer réels et imaginaires.
07:1
6929
5440
6
(en valeurs efficaces) de la tension aux bornes du condensateur (ou de l’inductance)
par rapport à celle du générateur (cette notion est développée à la question 17.).
La loi des mailles consistant à dire pour le circuit GBF − RLC (dans cet ordre)
12 = 12 + 60 + 60 est évidemment incorrecte car elle n’est pas additive pour les
valeurs efficaces ! Elle doit s’écrire pour les grandeurs instantanées ou valeurs
efficaces complexes 12 = 12 + j 60 − j 60 , résultat qui rappelle bien qu’à la résonance
d’intensité, la tension aux bornes de la résistance est en phase avec celle du
générateur et que les tensions aux bornes du condensateur et de l’inductance, en
opposition de phase entre elles, sont en quadrature avec les précédentes.
:160
.179
.65.2
47. Un récepteur de radio est basé sur le phénomène de résonance d’un circuit « LC »
oscillant à haute fréquence (environ 100 MHz en FM). On ajuste la fréquence
propre du circuit en faisant varier la capacité du condensateur. Ceci permet de ne
recevoir qu’une station à la fois.
iques
:211
0753
582:
8891
2320
48. Le dispositif plat d’environ 3 cm de côté (collé par exemple sur les boîtiers des
disques compacts ou l’intérieur de la couverture d’un livre) est constitué simplement
d’une spirale conductrice (l’inductance, enroulée comme le fil d’une bobine) dont
les extrémités sont reliées à deux petits conducteurs carrés séparés par un isolant (le
condensateur). Il s’agit donc d’un circuit électrique de type LC . Entre les bras du
portillon règne un signal électromagnétique alternatif dont la fréquence élevée (de
l’ordre de la dizaine de MHz) est réglée sur la fréquence ω0 = 1/ LC de l’antivol ;
au passage de l’antivol, il y a résonance et le dispositif émetteur dans le portique
fournit alors une énergie importante au circuit antivol ; cette augmentation de
l’intensité du courant dans le dispositif du portillon provoque le déclenchement du
signal d’alarme.
Micro
techn
49. La hauteur (liée à la fréquence) est fixée par un oscillateur ; le timbre (lié à la
superposition dosée de plusieurs harmoniques) est obtenue par un filtre (ou par
filtrage) ; quant à l’intensité (liée à l’amplitude), elle est réglée par un amplificateur
de gain variable.
e Mé
caniq
ue e
t des
50. La compression MP3 utilise une analyse spectrale sur chaque intervalle de temps
d’un signal musical. Puis, dans le spectre obtenu, elle élimine les composantes
inutiles. Par exemple : si on a la présence dans le signal d’une amplitude spectrale
importante à 500 Hz et d’une faible amplitude spectrale à 490 Hz , on peut sans
conséquence audible supprimer la seconde (effet de masquage). En simplifiant ainsi
le spectre, on allège évidemment le fichier. Il ne reste plus ensuite qu’à reconstituer
le signal avec ce spectre « amaigri ». Ces opérations de codage – décodage ne
posent aucun problème avec les ordinateurs modernes.
e Na
Écol
tiona
Rappelons qu’une réduction d’un facteur
périe
, la puissance reçue par la résistance est P = R I 2 =
2 correspond à une diminution de 3 dB.
le Su
I maxi
ure d
2
RI maxi
P
= maxi .
2
2
2
Le rapport le plus simple 1 2 a bien été choisi, mais pour la puissance !
51. Pour I =
&KDSLWUH
52. Le comportement sera celui d’un passe-bande si la valeur G dB = G dB ,max − 3 fait
apparaître une fréquence de coupure basse. Ce qui est illustré dans les deux cas cidessous :
H
H
H max
6929
5440
6
H max
H0
H max
H max
2
2
07:1
H0
passe-bande
.65.2
passe-bas
f
:160
.179
f
2320
53. Il s’agit d’un problème important des montages électroniques. Il faut utiliser la
modélisation linéaire des amplificateurs :
Z s1
H1 u e
Z e2
u s1 u e 2
582:
Z e1
H2 ue
is
Z s2
us
0753
ue
8891
ie
quadripôle 1
:211
quadripôle 2
iques
Us
U U s1
= s
≠ H 1 H 2 ! En effet la tension u s1 ne correspond pas à une
U e U e2 U e
sortie ouverte (hypothèse de validité de H 1 ).
Z e2
U e 2 = U s 1 = H 1U e
et U s = H 2 U e 2
Z e 2 + Z s1
Micro
techn
H =
Z s1 = 0
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
ure d
Cette dernière condition est très souvent vérifiée pour les quadripôles amplificateurs
(modèle idéal u s (t ) indépendant de i s ), ce qui permet de faire le produit des
fonctions de transfert, même lorsque l’impédance d’entrée d’un étage n’est pas
infinie ! Une condition bien pratique dont il faut avoir conscience.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
si Z e 2 Z s1 (cas sortie ouverte)
e Mé
ou si
Us
H U
Z e2
= 2 e2 = H 2 H 1
Ue
Ue
Z e 2 + Z s1
ue e
t des
Finalement : H = H 2 H 1
H =
caniq
On en tire :
§
·
1 + ω 2 ω12 )
(
¸
54. G dB = 20 log ¨
¨ ( 1 + ω 2 ω 22 ) ( 1 + ω 2 ω 32 ) ¸
©
¹
G dB = 10 log ( 1 + ω 2 ω12 ) − 10 log ( 1 + ω 2 ω 22 ) − 10 log ( 1 + ω 2 ω 32 )
12
07:1
6929
5440
6
G dB = G1 − G 2 − G3 , il suffit donc après l’étude asymptotique des termes d’ordre
un (très simple) d’ajouter ou soustraire, éventuellement graphiquement, pour obtenir
le diagramme de Bode asymptotique en amplitude de la fonction de transfert
factorisée.
.65.2
55. Imaginons une relation entre les tensions de sortie et d’entrée en RSF : u s =
K
ue ,
jω
1
1 du s
, u s (t ) est donc une primitive de u e (t ) . Le
jω u s et u e (t ) =
K dt
K
montage est un intégrateur théorique. Pour un intégrateur théorique la fonction de
K
transfert est donc H =
et G dB = 20 log K − 20 log x , soit une droite de pente
jx
−20 dB/décade .
8891
2320
:160
.179
alors u e =
Pour un dérivateur théorique H = K jx et G dB = 20 log K + 20 log x , soit une
f1
techn
G dB
iques
Exemple : pour le passe-bande du
second ordre ci-contre avec Q petit,
si f < f 1 ( f f 1 ) : dérivateur
:211
0753
582:
droite de pente +20 dB/décade .
Donc si le diagramme asymptotique, d’une fonction de transfert d’un filtre
quelconque, fait apparaître des pentes
de + 20 dB/décade dérivateur dans la plage de fréquences correspondantes
de – 20 dB/décade intégrateur dans la plage de fréquences correspondantes
si f > f 2 : intégrateur
Micro
si f ∈ [ f 1 , f 2 ] : amplificateur
f
éch. log
−20 dB/décade
ue e
t des
Ce résultat se généralise, avec les
pentes multiples de 20 dB/décade : par
exemple une pente de – 40 dB/décade
correspond à un double intégrateur.
f2
caniq
+20 dB/décade
e Na
Écol
tiona
le Su
périe
ure d
e Mé
56. Pour un fondamental du premier ordre réalisé avec un dipôle RC (exemple de la
H0
question 20.) : H ( jω ) =
que l’on peut écrire :
1 + j RC ω
du s
u s (t ) + j RCω u s (t ) = H 0 u e et avec jω u s =
dt
du s (t )
u s (t ) + RC
= H 0 u e ; les grandeurs réelles vérifient la même équation :
dt
&KDSLWUH
du s (t )
= H 0 ue
dt
Cette équation différentielle est vérifiée en RSF, or l’équation différentielle
régissant l’évolution du système linéaire est unique, c’est elle pour tous les régimes.
De façon plus générale, le dénominateur de la fonction de transfert correspond
formellement à l’évolution en régime libre. Dans l’écriture normalisée, par exemple
pour les systèmes du second ordre, on retrouve pour les coefficients du polynôme de
degré 2 en jω au dénominateur, les coefficients de l’équation différentielle
homogène du régime libre.
07:1
6929
5440
6
u s (t ) + RC
.65.2
arg F
57. Fonction retard
s (t ) = E m cos ( ω t − ωτ ) ; F = e − j ωτ ;
π
:160
.179
F = 1 et arg F = −ωτ = −2π f τ
8891
2320
−π
f
582:
([HUFLFHV
0753
58. Détermination expérimentale d’une inductance
La résistance R a et la bobine de résistance R et d’inductance L étant en série, elles
iques
:211
sont parcourues par le même courant d’intensité i . Lors de la mesure, il faut
considérer l’impédance du voltmètre très grande devant les impédances des dipôles.
En notation complexe, avec les valeurs efficaces :
et U B = ( R + jLω ) I
U Ra = Ra I
et U B = R 2 + L2ω 2 I
techn
U R a = Ra I
Micro
Et en module :
U B2 2
R a − R2
U R2 a
1
2π f
caniq
AN : L = 211 H , valeur très grande par rapport à celle des bobines de TP de l’ordre
ure d
e Mé
de 10 mH avec 400 spires sur 10 cm . De plus les valeurs des inductances
dépendent souvent de la fréquence d’utilisation.
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
59. Filtre du second ordre
Sortie ouverte et source idéale sinusoïdale à l’entrée.
Étude préalable en hautes et basses fréquences
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
L=
ue e
t des
L’élimination de I conduit à :
R
R
u s = ue
R
us = 0
ue
BF
HF
Utiliser deux diviseurs de tension pour
établir la fonction de transfert :
Us
1 jC ω
1
=
=
U1
R + 1 jCω 1 + j RCω
e(t )
U1
Z
=
Ue
R+Z
A
R
F
R
C
.65.2
u1
us
C
G
.179
B
avec Z ≡ ( R, C série ) & ( C ) :
1 + j RC ω
jCω ( 2 + j RCω )
:160
Z =
6929
5440
6
R
07:1
ue
8891
2320
jCω ( 2 + j RCω )
U1
1 + j RCω
=
Ue
jCω ( 2 + j RCω ) 1 − R 2 C 2 ω 2 + 3 j RCω
0753
582:
Us
1
=
2
2
U e 1 − R C ω 2 + 3 j RCω
1
1
; Q = ; H0 = 1
RC
3
:211
Il s’agit d’un filtre fondamental du second ordre : ω 0 =
2
techn
iques
H 0 est le transfert statique, H ( x) est une fonction décroissante de x car Q < 1
(voir l’étude à la question 23.) conformément à l’étude préalable.
ue e
t des
Micro
60. Réalisation d’un teslamètre
a) Le suiveur (amplificateur idéal d’impédance de sortie nulle) isole le capteur de la
chaîne de mesure, le capteur branché sur le suiveur (impédance d’entrée infinie)
ne délivre aucune puissance. De façon plus générale l’impédance de sortie de
chaque étage est nulle, ce qui permet de réutiliser les fonctions définies en sortie
ouvertes (voir la question 53.).
V
R2
(U 2 − U 1 ) ; on choisit U 1 = + cc avec
2
R1
R 6 = 3R 5
e Mé
c) U 2 = U c ; U 3 =
caniq
b) La tension continue du décaleur permet de supprimer la composante Vcc 2 .
ure d
§
R ·R
en remplaçant : U s = ¨ 1 + 4 ¸ 2 λ B
R3 ¹ R1
©
R3
λ
=
= 0, 15
R4
K −λ
périe
R1 = R2
soit
e Na
Écol
tiona
le Su
L’énoncé impose
&KDSLWUH
61. Étude et réalisation d’un filtre passe-bas
1
−
1
−
2
2
2
a) H ( x) = ª(1 − 2 x 2 ) + ( 2 x − x 3 ) º = (1 + x 6 ) 2
¬«
¼»
en
BF,
G dB = 0 ,
et
en
HF,
6929
5440
6
b) H ( x) est une fonction décroissante de x et G dB = −10 log ( 1 + x 6 ) :
G dB
G dB = − 60 log x , donc coupure à
− 60 dB/décade en HF.
La coupure est meilleure qu’avec un
filtre passe-bas du second ordre
( −40 dB/décade ), de façon générale,
elle s’améliore quand l’ordre du
filtre augmente et le filtre tend vers
un filtre passe-bas idéal.
x
éch. log
−60 dB/décade
07:1
1
2320
:160
.179
.65.2
−40 dB/décade
−20 dB/décade
­
3R
° L1 =
2
ω0
°
°
R
L
= 1
® L2 =
2
3
ω
0
°
°
4
°C =
3
R
ω0
¯
ue e
t des
­ L1 + L2
2
=
°
R
ω
0
°
°
2
® L1 C = 2
ω
0
°
° L1L2C
1
= 3
°
R
ω
0
¯
e Mé
caniq
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
ure d
d) Il faut que les impédances de sortie des filtres 1 et 2 soient nulles, alors
H = H 1 H 2 . On veut un numérateur constant, on choisit donc des filtres
fondamentaux. On peut obtenir un dénominateur de degré 3 avec un filtre d’ordre
1 et un filtre d’ordre 2.
H0
H3 =
§
jx
2 ·
( 1 + jx ) ¨ 1 + + ( jx ) ¸
Q
©
¹
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
techn
iques
:211
0753
582:
8891
c) Avec deux diviseurs successifs, en notant u1 la tension aux bornes du
condensateur :
Us
R
U1
Z
1
=
et
=
(attention Z et pas
!) avec :
U1
R + j L2 ω
Ue
Z + j L1 ω
jCω
( R + j L2 ω ) 1 jCω = ( R + j L2 ω )
Z =
R + j L2 ω + 1 jCω 1 − L2 C ω 2 + j RCω
U U
On remplace dans H = s 1 :
U1 U e
1
H =
L + L2
LLC
2
3
jω + L1 C ( jω ) + 1 2 ( j ω )
1+ 1
R
R
Soit l’expression voulue, par identification des coefficients du polynôme en jω :
1
§
1 ·
1 ·
2 §
1 + j x ¨ 1 + ¸ + ( j x ) ¨ 1 + 2 ¸ + ( j x) 3
Q¹
Q ¹
©
©
6929
5440
6
H =
Q =1
On obtient la fonction de transfert du a) en prenant
.65.2
07:1
62. Couplage AC et DC d’une entrée d’oscilloscope
Z osc
j R 0 C Dω
a) Avec un simple diviseur : H =
=
, il s’agit
Z osc + Z C D 1 + j R0 ( C 0 + C D ) ω
2320
:160
.179
donc d’un passe-haut du 1er ordre.
j R0 C D ω
Avec C D C 0 H =
1 + j R0 C D ω
En couplage DC, on a évidemment u ′e (t ) = u (t ) .
Ue U2
=
, on mesure, avec une incertitude (lecture + amplificateur) de
U
U1
l’ordre de 4% pour U et 6% pour ϕ ) :
0, 4
U2
= 0, 72 ± 0, 03 et ϕ 2 1 = +2π
= 0, 74 rad ϕ 2 1 = (0, 74 ± 0, 04) rad
3, 4
U1
1
1
π
≈ 0, 71 et arg( H ) =
Or pour f = f 0 =
, H =
≈ 0, 78 rad .
2π R0C D
4
2
La mesure correspond à peu près à f = f 0 , on mesure :
3, 4
T0 = 20.10 −3
≈ 8, 5.10 −2 s f 0 ≈ (11,8 ± 0,1)Hz .
0,8
La fréquence de coupure est d’environ 12 Hz .
1
CD =
≈ 13.10 −9 F = 13nF
ce
qui
vérifie
On
en
déduit
2π R0 f 0
C D C 0 = 12 pF .
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
b) H ( jω ) =
caniq
c) La dérivée théorique de u (t ) est une suite de pics
correspondants aux discontinuités de u (t ) .
u = u C + u e ; quand u = cste = U , u C = U et
du
dt
t
e Mé
u e = 0 ; quand u s’annule, u C continue garde sa
e Na
Écol
tiona
le Su
périe
ure d
valeur et u e prend donc la valeur − U à cet instant et
est discontinue ; le condensateur se décharge ensuite
avec la constante de temps R0C D , d’où le graphe observé.
Autre interprétation, le filtre est un passe-haut du 1er ordre, donc le diagramme de
Bode dans les basses fréquences a une pente de + 20 dB/décade et ceci jusqu’à
environ 12 Hz . Il se comporte donc comme un dérivateur. La période mesurée de
&KDSLWUH
u (t ) est T1 ≈ 0, 4 s soit f 1 ≈ 2, 5 Hz . Donc les harmoniques f 1 , 3 f 1 et 5 f 1 sont
dérivées, ce qui donne approximativement la dérivée.
.179
.65.2
07:1
6929
5440
6
63. Analyseur de spectre (*)
a) L’incertitude est de 1 sur n et l’incertitude relative sur la mesure de f est :
U ( f ) 1 NT A
1
=
=
f
n NT A
n
1
Pour une précision d’au moins 1%, il faut
≤ 10 −2 n ≥ 100
n
f
f
n
N =n
≥ 10 2
et avec f =
fA
fA
NT A
:160
AN : N ≥ 167 mais N est du type 2 p , on a 2 7 = 128 et 2 8 = 256 , il vient :
2320
N = 256 et NT A = 256 ms
n
df
dn df A
U ( f A)
fA
=
+
donc avec
= 10 −4 il est inutile d’avoir
N
f
n
fA
fA
582:
b) f =
8891
La mesure est assez rapide pour cette précision.
techn
iques
:211
0753
U ( n)
1
4 f
< 10 −4 . Avec U (n) = 1 , on prendra donc
≥ 10 −4 et N ≤ 10 A
f
n
n
4
14
3
AN : N ≤ 1, 7 10 soit environ 2 = 16.10 et une durée de mesure d’environ
16 s qu’il est inutile de dépasser.
8
14
Finalement on choisit : 2 ≤ N ≤ 2 .
n5
n
f A f 1* = 5 f A et
N
5N
le Su
tiona
e Na
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
U ( f 1* ) =
Écol
f5 =
U ( f 5 ) U ( f 1* )
1
=
=
f5
f 1*
n5
périe
f 5 = 5 f 1*
ure d
meilleure précision de mesure (on néglige l’incertitude sur f A ).
f 1*
f
= A
5
5N
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
Micro
c) N = 210 = 1028 est bien inférieur à 214 .
La décomposition en série de Fourier conduit à n k = k n1 . On trace n k en
fonction de k . L’alignement, compte-tenu de l’incertitude ±1 sur n , permet de
valider la proposition (voir la partie vérification d’une loi physique du
chapitre 0).
Pour mesurer la valeur n1* du fondamental on peut utiliser un encadrement de la
pente de la droite ainsi tracée.
U ( n) 1
On peut aussi considérer l’incertitude relative sur chaque mesure :
=
n
n
dont la plus petite valeur est atteinte pour n5 = 5 n1* , qui correspond donc à la
AN : f 1* =
924
1
10 3 ±
10 3
5 × 1024
5 × 1024
f 1 * = (180,5 ± 0,2 ) Hz
6929
5440
6
d) On transforme le produit des cosinus en somme :
1
1
§
·
u (t ) = U 0 ¨ cos (2π f 1t ) + cos ( 2π ( f 1 + f 2 )t ) + cos ( 2π ( f 1 − f 2 )t ) ¸
2
2
©
¹
Il n’y a que deux raies détectées, donc f 1 + f 2 > f A correspond à n > 1024 .
n2
fA
N
n1
fA
N
et f 1 − f 2 =
f2 =
n 2 − n1
fA
N
.65.2
f1 =
07:1
On en déduit : n1 ↔ f 1 − f 2 et n 2 ↔ f 1 .
:160
.179
AN : f 1 = 725 Hz et f 2 = 328 Hz . On a bien f 1 + f 2 = 1053 Hz > f A .
2320
4XHVWLRQVRXYHUWHV
0753
582:
8891
64. Un dipôle résistif ? (*)
Indications : La méthode consistant à calculer l’impédance du dipôle avant d’en
annuler la partie complexe est lourde... Mieux vaut limiter les calculs
en examinant d’abord la situation pour des fréquences particulières.
B
Micro
techn
iques
:211
Si la solution existe ∀ω , elle vaut forcément :
* R = R 1 (faire ω → 0 , le condensateur est A
R1
L
équivalent à un interrupteur ouvert et la bobine à
R2
C
un court-circuit, penser à leurs impédances)
* et aussi R = R 2 (faire ω → ∞ , le condensateur
est équivalent à un court-circuit et la bobine à un interrupteur ouvert).
En posant R = R1 = R 2 , la condition Z AB = R s’écrit :
( R + jLω ) & ( R − j / Cω ) = R
ue e
t des
( R + jLω )( R − j / Cω ) = R ( 2 R + j ( Lω − 1/ Cω ) )
R = L/C
et après développement :
ure d
e Mé
caniq
Cette valeur est théorique, en pratique on ne pourra pas réaliser strictement l’égalité
avec les valeurs des composants réels. De plus les valeurs des inductances
dépendent souvent de la pulsation…
e Na
Écol
tiona
le Su
périe
65. Régime sinusoïdal forcé… ou pas ?
di
U
Il vient facilement L = U m cos (ω t ) i (t ) = m sin (ω t ) + cste .
dt
Lω
Avec les CI et la continuité de l’intensité dans la bobine :
&KDSLWUH
i (t ) =
i (0 + ) = i (0 − ) = 0 cste = 0 et
Um
sin (ω t )
Lω
Um
Lω
Um
(1 − cos(ω t ) )
Lω
i (t ) =
et
07:1
i (0 + ) = i (0 − ) = 0 cste =
6929
5440
6
i (t ) est sinusoïdale de pulsation ω , mais il ne s’agit pas d’un RSF…
U
En effet avec u (t ) = U m sin(ω t ) , on aura i (t ) = − m cos (ω t ) + cste .
Lω
Avec les CI et la continuité de l’intensité dans la bobine :
8891
2320
:160
.179
.65.2
i (t ) n’est pas sinusoïdale, ni d’ailleurs alternative, sa valeur moyenne n’est pas
nulle, il ne s’agit pas d’un RSF.
Dans les deux cas i (t ) est la somme du régime forcé et du régime libre (ici
constant). Le régime forcé seul ne peut pas être observé ici car la solution régime
libre ne s’annule pas (le circuit est théorique, sans composant dissipant de l’énergie).
On observe donc un régime « transitoire » qui dure indéfiniment.
Dans le premier cas, la valeur nulle de la constante régime libre dissimulait le
problème.
0753
582:
Ce calcul illustre bien le danger d’utiliser le terme régime permanent (ambigu et mal
défini) à la place de régime forcé.
iques
:211
66. Identification (*)
Indication : Il faut relier chaque tension à son graphe. Attention en RSF les
amplitudes ne s’ajoutent pas, voir les questions 13. et 46..
techn
On détermine l’avance de phase de u 2 (t ) sur u e (t ) avec :
e Mé
caniq
U1
R
U
Z
jLω
=
soit 2 = =
Ue Z + R
U1 R R + jL ω
π
Lω
d’où l’on déduit : ϕ u2 /u1 = − Arctan
> 0.
R
2
Ainsi u 2 (t ) , en avance sur u e (t ) et sur u 1 (t ) , correspond à la courbe :
ure d
Lω
Lω
> Arctan
l’avance de u 2 (t ) sur u 1 (t ) est plus importante que
R
R
celle sur u e (t ) , u 1 (t ) correspond à la courbe :
périe
Arctan 2
tiona
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
le Su
et u e (t ) correspond à la courbe :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
U2
Z
R jLω
U2
jLω
=
et Z =
=
Ue Z + R
R + jL ω
U e R + 2 jL ω
π
Lω
d’où l’on déduit : ϕ u2 /ue = − Arctan 2
> 0.
R
2
Puis l’avance de phase de u 2 (t ) sur u 1 (t ) avec :
10
5
= 5, 0 V E =
= 3,5V .
2
2
2π
La période est T = 10 × 0,1 = 1, 0 ms et ω =
= 6,3 103 rad.s −1 .
T
Les ordres de grandeur correspondent aux TP : quelques volts et le kHz.
6929
5440
6
La courbe u e (t ) amplitude
On mesure enfin l’avance de u 2 (t ) sur u 1 (t ) :
Δt
1, 3
= 2π
en gardant dans le rapport les mm mesurés.
T
7, 2
L 1
§π
·
On en déduit : = tan ¨ − ϕ 2/1 ¸ = 2,1 10−5 s .
R ω
©2
¹
Soit un ordre de grandeur plausible pour la constante de temps ( 20 ȝs ).
:160
.179
.65.2
07:1
ϕ 2/1 = 2π
8891
2320
67. Le bon choix de filtre (*)
Indications : On peut par une étude préalable du comportement, éliminer certains
cas et éviter quelques calculs de fonction de transfert. L’énoncé
précise que l’ordre n’est pas supérieur à 2.
582:
Le filtre doit être un passe-bas de fréquence de coupure f c telle que f1 < f c f 2 .
iques
:211
0753
* les filtres n et o sont des filtres fondamentaux d’ordre 1 donc passe-bas. Les
constantes de temps, R1C1 = R 2C 2 , sont égales et donc les fréquences de coupure
aussi :
1
f c1 = f c 2 =
= 160 Hz , ces fréquences trop basses ne conviennent pas.
2π R 2C 2
ue e
t des
Micro
techn
* Le filtre p coupe les hautes et les basses fréquences (la bobine est un court-circuit
en basse fréquence et le condensateur en haute-fréquence). C’est a priori un
passe-bande. La constante de temps LC donne l’ordre de grandeur de la
1
fréquence centrale f 0 =
= 0,16 MHz , elle ne coïncide pas avec f1 donc
2π L 3C 3
le filtre ne convient pas. Les constantes de temps RC et L / R sont plus grandes.
e Mé
caniq
* Le filtre q coupe les basses fréquences (la bobine est un coupe-circuit) et laisse
passer les hautes fréquences ( u (t ) = n (t ) en HF). C’est un filtre passe-haut, il ne
convient pas.
ure d
* Les filtres r et s sont a priori des passe-bas. On calcule la fonction de transfert
du filtre s, en égalant les deux valeurs de C , on obtiendra celle du filtre r :
1
1 + jRC2ω
1 + jRC2ω 1 + jRC2ω + jR (C2 + C1 )ω − R 2C1C2ω 2
1
1
H6 =
et H 5 =
2
2
2
2 2
1 − R6 C61C62ω + jR6 (C61 + 2C62 )ω
1 − R5 C5 ω + 3 j R5C5ω
e Na
Écol
tiona
le Su
périe
H6 =
&KDSLWUH
Les fréquences de coupure seront de l’ordre des fréquences propres :
1
= 160 Hz trop basse, donc ne convient pas
2π R 5C5
f 06 =
1
= 16 MHz , on a bien f1 = 1, 0 MHz < f 06 f 2 = 20 GHz , le
2π R 6 C 61C 62
6929
5440
6
f 05 =
07:1
filtre le plus adapté est donc celui-ci.
S2 / S1
1,5
2,0
7,2
1,5 10 −2
.179
S 2 m en V
1,5
2,0
3,6
0,075
:160
S1m en V
1,0
1,0
0,50
5,0
2320
f en kHz
0,10
5,0
10,0
100
ϕ 2/1 en rad
0,0
0,0
−1, 5
−3,1
8891
Essai 1
Essai 2
Essai 3
Essai 4
T en ms
10
0,20
0,10
0,010
.65.2
68. Étude expérimentale
On obtient les mesures :
:211
0753
582:
La phase décroît de 0 à environ −π , les BF passent, il existe une résonance et le
gain tend vers 0 en HF. Il s’agit d’un fondamental d’ordre 2 avec un coefficient
1
H0
(voir questions 16. et 17.)
Q>
et un gain statique H 0 > 0 : H =
jx
2
1 − x2 +
Q
On a une quadrature retard approchée pour f 3 , donc : f 0 ≈ f 3 = 10 kHz ;
H 3 7, 2
=
= 4,8 .
H 0 1,5
techn
Pour f = f 0 , H = Q H 0 Q ≈
iques
En BF : H → H 0 = 1,5 .
1
≈ f 0 = 10 kHz .
2Q 2
ue e
t des
Micro
La fréquence de résonance est f r = f 0 1 −
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
ure d
e Mé
caniq
69. En mode DC : il mesure la valeur moyenne ou composante continue.
En mode AC : il mesure la valeur efficace de la composante alternative.
En mode AC + DC : il mesure la valeur efficace du signal complet.
La plupart des multimètres mesurent la valeur efficace vraie (TRMS) et ne sont plus
limités aux signaux sinusoïdaux comme les voltmètres analogiques.
L’ampèremètre (de faible résistance) doit être placé en série avec le dipôle à travers
lequel doit être mesurée l’intensité, et le voltmètre (de grande résistance) en
parallèle sur le dipôle aux bornes duquel doit être mesurée la différence de potentiel.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
7UDYDX[SUDWLTXHV
70. Sur l’écran de l’oscilloscope la sinusoïde en
avance « passe » par un maximum avant l’autre,
c’est-à-dire que le maximum de la sinusoïde en
avance se trouve à gauche du maximum de l’autre
sinusoïde.
Sur l’exemple ci-contre : 1 est en avance sur 2 et
6929
5440
6
ϕ = 2π
2
1
Δt
Δt
T
t
8891
2320
:160
.179
.65.2
07:1
S’assurer avant la mesure que les deux zéros sont bien superposés.
Les oscilloscopes numériques fournissent des mesures automatiques, attention
cependant de donner une valeur de ϕ comprise entre −π et π .
Sur un oscilloscope analogique on peut estimer le déphasage par une méthode
proportionnelle : étendre à l’aide des boutons discret puis continu de la base de
temps une demi-période (soit 180° ) de la 1ère sinusoïde sur 9 carreaux (chaque
carreau représente alors 20° et chacune des 5 graduations d’un carreau représente
4°) ; le décalage de la 2ème sinusoïde (évalué en carreaux) donne rapidement une
valeur approximative de son déphasage (si les zéros sont superposés !).
582:
71. Le générateur réel délivre une tension u (t ) = e − Rg i (t ) dont la valeur, à cause de sa
techn
iques
:211
0753
résistance interne Rg ≈ 50 Ω , dépend du courant débité, donc de la demande
(l’impédance) du circuit. C’est à la résonance où le courant est maximal que la
tension délivrée par le générateur est minimale. Il s’agit du problème plus général de
l’adaptation d’impédances. Pour faire une détermination correcte de la bande
passante par la réduction d’amplitude de facteur 2 , on peut y remédier en
intercalant un amplificateur idéal suiveur (d’impédance de sortie nulle) entre le
générateur et le dipôle (voir la question 60.).
ue e
t des
Micro
72. a) F représente le fréquencemètre sur le schéma. Attention, les masses du GBF, du
fréquencemètre et de l’oscilloscope, doivent être communes.
E
F
filtre
ue
e Mé
S
masse
us
ure d
GBF
caniq
oscilloscope
voie 1 voie 2
e Na
Écol
tiona
le Su
périe
b) On mesure les tensions crête à crête sur le schéma (dans une unité quelconque,
attention au rapport d’amplification). On lit alors à la fréquence de travail :
amplitude de us
= 0, 67 , d’où le gain en dB : GdB = 20 log ( 0, 67 ) = − 3,5 dB
amplitude de ue
&KDSLWUH
L’incertitude sur chaque amplitude est due à 2 lectures + appareil (3%) : les
graduations correspondent à 2 mV (voie 1) et 1 mV (voie 2)
2
2
2
2
§ U (U sm ) ·
§ U (U em ) ·
U
= ¨
Sur le rapport r :
¸ +¨
¸ ≈
r
© U sm ¹
© U em ¹
§ 2, 08 ·
§ 3, 6 ·
¨ 50 ¸ + ¨ 80 ¸
©
¹
©
¹
2
2
.65.2
U
≈ 6%
r
2
.179
2
07:1
§ 3 × 80 ·
§ 2
·
Sur 2U em : 2 ¨
× 2 ¸ ≈ 3, 6 mV
¸ +¨
© 12
¹
© 100 × 3 ¹
6929
5440
6
§ 3 × 50 ·
§ 1
·
Sur 2U sm : 2 ¨
× 2 ¸ ≈ 2, 08 mV
¸ +¨
© 12
¹
© 100 × 3 ¹
:160
r = 0,67 ± 0, 04
:211
0753
582:
8891
2320
L’avance de phase de la sortie par rapport à l’entrée à cette fréquence est :
décalage temporel
ϕ = 2π
= − 0, 78 rad , la sortie est en retard sur l’entrée.
période
Décalage temporel et période sont mesurés avec une unité quelconque.
En négligeant l’incertitude sur la période, la fréquence étant donnée par le
fréquencemètre. Avec une incertitude d’environ 5% sur le décalage temporel :
U (ϕ ) U ( Δt )
=
≈ 5% ϕ = (0,78 ± 0, 04) rad
Δt
ϕ
e Na
Écol
5pJLPHVLQXVRwGDOIRUFpHWILOWUDJH
tiona
le Su
périe
ure d
74. Dans ce cas, il n’est pas recommandé de chercher le maximum d’amplitude de sortie
pour trouver la résonance. Par définition, un maximum correspond à une dérivée
nulle, ce qui confère une mauvaise précision à une mesure où on repère une
grandeur qui varie peu.
La phase ϕ de la sortie par rapport à l’entrée, en revanche, varie rapidement en ce
point. Pour un passe-bande, elle vaut soit 0 (non inverseur, cas du RLC série) soit π
(inverseur) et sa pente est maximale. La méthode la plus précise consiste donc, à
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
Micro
techn
iques
73. Balayer d’abord rapidement, en augmentant la fréquence du GBF, l’ensemble du
spectre pour avoir une idée du comportement global du filtre (est-ce un passe-bande,
un passe-bas… ?). Il est en effet facile de voir comment évolue l’amplitude de la
sortie avec la fréquence, sans régler la base de temps. Ensuite, repérer la (ou les)
fréquence(s) donnant un gain maximum, donc une amplitude maximale puisque
l’amplitude d’entrée est constante. Mesurer alors le nombre de carreaux crête à crête
de ce maximum, le diviser par 2 , ce qui correspond à une perte de 3 unités pour le
gain en décibels, et ajuster la fréquence pour afficher cette valeur crête à crête sur
l’écran ; la fréquence trouvée est une fréquence de coupure à –3 dB.
Si le filtre est un passe-bande, il y a deux fréquences à mesurer. Leur différence est
alors la largeur de la bande passante en fréquence du filtre.
La valeur choisie pour l’amplitude d’entrée importe peu puisque, par linéarité, la
sortie lui est proportionnelle. Mais attention, on doit rester dans le domaine linéaire.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:160
.179
.65.2
07:1
6929
5440
6
partir des courbes d’entrée et de sortie sur les deux voies de l’oscilloscope à passer
en position X-Y (tracé de la sortie en fonction de l’entrée). Les deux sinusoïdes
d’entrée et de sortie étant déphasées, on obtient en général une ellipse. Mais à la
résonance, l’ellipse devient un segment (car u s et u e sont alors proportionnelles), la
précision de la mesure de fréquence est optimale. L’incertitude-type associée à
l’appréciation du segment est bien plus petite que celle associée à l’appréciation du
maximum (erreur de méthode), qui est prédominante dans l’incertitude de mesure de
la fréquence (lecture + appareil).
&KDSLWUH
07:1
6929
5440
6
&KDSLWUH
'\QDPLTXHGXSRLQW
PDWpULHO
.65.2
/HVRUGUHVGHJUDQGHXUXWLOHV
.179
G = 6,67.10−11 N.m2.kg−2
g = 9,81 m.s−2
:160
constante de gravitation
accélération de la pesanteur (terrestre)
2320
/D7HUUH
techn
iques
:211
0753
582:
8891
jour solaire moyen
Tm = 1 jour = 24 h = 86400 s
jour sidéral
Ts = 23h 56min 04s = 86164 s
vitesse de rotation propre
ω = 2π/Ts = 7,3.10−5 rad.s−1
rayon (périmètre) dans modèle sphérique RT = 6370 km ≈ 6,4.103 km (≈ 40 000 km)
masse
MT ≈ 6,0.1024 kg
champ de gravitation à la surface
A0 = GMT/RT2 ≈g0 ≈ 9,81 m.s−2
(modèle sphérique)
masse volumique moyenne
ρT = 3MT/4πRT3 ≈ 5 g.cm−3 =
(modèle sphérique)
5.103 kg.m−3
altitude d’un satellite géostationnaire
h ≈ 36 000 km
−1
v
=
2GM
vitesse de libération à partir du sol
l
T /R T ≈ 11,2 km.s
vitesse et période d’un satellite de basse
altitude
Micro
de l’ordre de 8 km.s−1 et 1h 30 min
1 unité astronomique = dST
≈ 150 millions km
1 année = A = 365,25 jours
vo ≈ 2πdST/A ≈ 30 km.s−1
≈ 4,5 milliards d’années
rayon de son orbite = distance Terre-Soleil
ue e
t des
période de révolution autour du Soleil
vitesse moyenne sur son orbite
âge de la Terre
e Mé
L = 29,5 jours
ure d
TL = 27,3 jours
1/TL = 1/L + 1/A
e Na
tiona
le Su
périe
dTL = 380 000 km (TL2/dTL3 = 4π2/GMT)
ML ≈ MT/81 ≈ 7,4.1022 kg
Écol
'\QDPLTXHGXSRLQWPDWpULHO
caniq
/D/XQH
lunaison (période entre deux pleines
lunes)
période orbitale
= période de rotation propre
distance Terre-Lune
masse
champ de gravitation à la surface
(modèle sphérique)
diamètre apparent
g0L = GML/RL2 ≈g0/6 ≈ 1,7 m.s−2
αL = 32’ ≈ 0,5°
/H6ROHLO
dST ≈ 150.106 km
soit 8min 20s pour la lumière
MS ≈ 2,0.1030 kg (A2/dST3 = 4π2/GMS)
RS ≈ 700 000 km
αS = αL = 32’ ≈ 0,5° αS ≈ 2RS/dST
Tc ≈ 15 millions de K
Ts ≈ 5700 K
PS ≈ 4.1026 W
distance Terre-Soleil
07:1
6929
5440
6
masse
rayon
diamètre apparent
température au centre
température en surface
puissance rayonnée
.65.2
/·8QLYHUV
.179
≈ 15 milliards d’années
âge de l’Univers
:160
/HVFRQVWDQWHV
2320
ε0 = 8,85.10−12 F.m−1 ;
1/4ʌε0 = 9,0.109 F–1.m
c = 3,0.108 m.s−1
− e avec e = 1,6.10−19 C
me = 0,9.10−30 kg (E = mec2 = 0,51 MeV)
e et mp = 1,7.10−27 kg ≈ 1850 me
permittivité diélectrique du vide
:211
0753
582:
8891
célérité de la lumière dans le vide
charge de l’électron
masse de l’électron
charge et masse du proton
iques
/HFRXUVG·DERUG
techn
&LQpPDWLTXHGXSRLQW
ue e
t des
Micro
1. Qu’est-ce qu’un référentiel ? Pourquoi doit-on le définir avant de parler de
mouvement ? Qu’est ce qui distingue un repère et un référentiel ? Définir la vitesse
d’un point mobile (vitesse instantanée) à partir du vecteur vitesse moyen. Montrer
que la vitesse est tangente à la trajectoire. Comment est défini le vecteur
accélération ? À quoi sert-il ?
ure d
e Mé
caniq
2. On enregistre le mouvement d’un palet glissant sur un banc à coussin d’air incliné
sur l’horizontale. On relève les positions successives d’un même point du palet, au
cours du temps, à intervalle de temps réguliers Δt = 20 ms :
périe
O
e Na
Écol
tiona
le Su
Dans quel référentiel le mouvement est-il étudié ? Quelle est la trajectoire ?
Dessiner en divers points un vecteur proportionnel au vecteur vitesse instantanée, en
&KDSLWUH
6929
5440
6
l’assimilant au vecteur moyen sur 80 ms. Que constate-t-on pour la norme et la
direction du vecteur vitesse ?
Dessiner en deux points au moins, un vecteur proportionnel au vecteur accélération
instantanée, en l’assimilant au vecteur moyen sur 80 ms. Que constate-t-on pour la
norme et la direction du vecteur accélération ? Peut-on faire un lien avec les
caractéristiques du vecteur vitesse ?
iques
:211
0753
582:
8891
2320
:160
.179
.65.2
07:1
3. On enregistre le mouvement d’un palet glissant sur une table à coussin d’air
horizontale, le palet est relié à un point fixe O du référentiel terrestre par un fil
inextensible, qui reste tendu pendant tout l’enregistrement. On relève les positions
successives d’un même point du palet (point d’accrochage du fil), au cours du
temps, à intervalle de temps réguliers Δt = 20 ms :
ue e
t des
Micro
techn
O
caniq
Répondre aux mêmes questions qu’à la question 2.
ure d
e Mé
4. Quel est le vecteur position d’un point M en projection sur une base cartésienne ?
G
G
Comment s’expriment sa vitesse v ( M )( R ) et son accélération a ( M )( R ) , par rapport à
périe
un référentiel ( R ) , en projection sur une base cartésienne ?
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
5. Dans quel cas est-il intéressant de définir un système de coordonnées polaires ?
Définir la base locale polaire. Quel est le vecteur position d’un point M en
projection sur la base locale polaire ?
G
G
Comment se projettent la vitesse v ( M )( R ) et l’accélération a ( M )( R ) , par rapport à
un référentiel ( R ) , sur la base locale polaire ?
6929
5440
6
6. Dans quel cas est-il intéressant de définir un système de coordonnées cylindriques ?
Définir la base locale cylindrique. Quel est le vecteur position d’un point M en
projection sur la base locale cylindrique ?
G
G
Comment se projettent la vitesse v ( M )( R ) et l’accélération a ( M )( R ) , par rapport à
07:1
un référentiel ( R ) , sur la base locale cylindrique ?
:160
.179
.65.2
7. Dans quel cas est-il intéressant de définir un système de coordonnées sphériques ?
Définir la base locale sphérique. Quel est le vecteur position d’un point M en
projection sur la base locale sphérique ?
G
Comment se projettent la vitesse v ( M )( R ) , par rapport à un référentiel ( R ) , sur la
base locale sphérique ?
8891
2320
8. Quelle est la définition d’un mouvement uniforme ? Quels sont les caractéristiques
d’un mouvement rectiligne ? Énoncer une condition nécessaire et suffisante de
mouvement rectiligne et uniforme d’un point.
0753
582:
JJJG
G
9. Si a ( M )( R ) = cste , le mouvement est-il rectiligne uniformément varié ? Avec cette
contrainte (accélération constante), quelle est la trajectoire dans le cas général ?
iques
:211
10. Définir un mouvement circulaire. Quel système de coordonnées est le mieux
adapté ? Comment s’expriment les vecteurs vitesse et accélération dans la base
locale correspondante ?
techn
11. Donner toutes les caractéristiques du mouvement circulaire uniforme et commenter.
ue e
t des
/RLVGH1HZWRQHWPRGpOLVDWLRQGHVIRUFHV
Micro
G
12. Pour un mouvement plan quelconque, relier les composantes du vecteur a et les
G
G
variations du vecteur v . Quelle est alors la base naturelle pour projeter a ?
13. Énoncer le principe d’inertie. Pourquoi a-t-il été aussi difficile à trouver ?
e Mé
caniq
14. Définir la quantité de mouvement d’un point, puis d’un système de points. Dans
quel cas la quantité de mouvement d’un système de points s’exprime-t-elle
G
simplement en fonction de vG ?
périe
ure d
15. Énoncer la relation fondamentale de la dynamique (ou loi de la quantité de
mouvement) pour un point matériel dans un référentiel galiléen. Puis dans le cas
d’un système fermé.
e Na
Écol
tiona
le Su
G
16. Dynamique du point libre : Dans le champ de pesanteur g , un projectile P de
G
masse m est lancé du point O avec une vitesse initiale v0 inclinée d’un angle α
&KDSLWUH
6929
5440
6
sur l’horizontale (axe Ox ). On note Oz la verticale ascendante et on choisit v0 z > 0 .
On ne tient pas compte ici des frottements dans l’air.
a) Déterminer l’équation de la trajectoire.
b) En supposant la vitesse initiale imposée en norme, déterminer la direction à lui
donner (l’angle de tir α est variable) pour obtenir la plus grande portée au sol.
c) Quelle est l’expression de « la flèche » ?
.65.2
07:1
17. Les mouvements du point libre dans le champ de pesanteur diffèrent notablement de
ceux établis à la question précédente (voir question 41.). Il faut prendre en compte
les frottements sur l’air. Rappeler les principales modélisations de la force de
frottement fluide.
:160
.179
18. Dynamique du point lié : Quel problème se pose dans l’étude du mouvement d’un
point contraint dans ses déplacements par un support matériel ?
582:
8891
2320
19. Comment modélise-t-on la force de rappel élastique exercée par exemple par un
ressort sur une de ses extrémités ? Étudier le mouvement d’une masse m, accrochée
à un ressort horizontal (l’autre extrémité étant fixe), et mobile, sans frottements, sur
une tige horizontale.
Tracer le portrait de phase de cet oscillateur.
ue e
t des
Micro
techn
iques
:211
0753
20. Le pendule simple
Une bille de masse m est accrochée à l’extrémité d’un fil de
masse négligeable, de longueur l et suspendu en un point O
O
fixe du référentiel terrestre. Dans cette question, on fait
l’hypothèse d’un mouvement plan du pendule.
G
g
a) Établir l’équation différentielle du mouvement par
θ
application de la relation fondamentale de la dynamique.
m
Dans l’hypothèse des petites amplitudes, quelle est la
•
solution θ (t ) sachant que le pendule a été lâché avec une
vitesse initiale nulle dans la position θ = θ0 .
b) Quelle est la période T0 des oscillations ? Commenter. Proposer une application
numérique.
3RXVVpHG·$UFKLPqGH
e Mé
caniq
21. Donner qualitativement l’origine de la poussée d’Archimède pour un corps
immergé.
ure d
22. Proposer une démonstration « sans calcul » du théorème d’Archimède, puis
l’énoncer.
périe
eQHUJLHPpFDQLTXH
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
23. Rappeler la définition du travail et de la puissance d’une force. Citer des cas de
nullité de la puissance.
24. Calculer le travail d’une force constante. Peut-on appliquer ce résultat au poids ?
6929
5440
6
25. Énoncer puis démontrer le théorème de l’énergie cinétique (ou loi de l’énergie
cinétique).
26. Définir un champ de force puis un champ de force conservatif. Quelle est la
propriété fondamentale des champs de force conservatifs ?
07:1
27. À quelle condition peut-on écrire une conservation de l’énergie mécanique et pourquoi parle-t-on dans ce cas d’intégrale première du mouvement ?
.179
.65.2
28. Quelles sont les expressions de l’énergie potentielle de pesanteur et de l’énergie
potentielle élastique ?
8891
2320
:160
29. Comment utiliser l’intégrale première de l’énergie pour étudier un mouvement, dans
le cas d’un système conservatif à un paramètre ( x par exemple) ? Considérer les
deux cas particuliers : barrière d’énergie potentielle, E P ( x ) = K / x , et puits
1
d’énergie potentielle, E P ( x ) = k ( x − x 0 ) 2 + cste .
2
582:
eWXGHGHO·pTXLOLEUH
:211
0753
30. Quand dit-on qu’un point matériel est à l’équilibre ? Comment, qualitativement,
peut-on distinguer un état d’équilibre stable d’un état d’équilibre instable ? Donner
un exemple simple dans chaque cas.
techn
iques
31. Si le système considéré est à un paramètre (variable linéaire x ou angulaire θ ) et
conservatif, comment l’équilibre se traduit-il sur son énergie potentielle ?
ue e
t des
Micro
32. Dans ce cas, proposer un développement limité de l’énergie potentielle au voisinage
de l’équilibre (il est conseillé d’introduire ε = x − xe ). Comment distinguer alors un
état d’équilibre instable d’un état d’équilibre stable ? Dans ce dernier cas,
qu’appelle-t-on approximation harmonique et quelle est alors la pulsation
d’oscillation au voisinage de l’équilibre ?
caniq
0RXYHPHQWVGHSDUWLFXOHVFKDUJpHV
ure d
e Mé
33. Comment décrit-on l’interaction entre particules chargées ? Comment peut-on créer
un champ électrique uniforme ? Quelle relation existe-t-il alors entre champ et
différence de potentiel ? Comment peut-on créer un champ magnétique uniforme ?
e Na
Écol
tiona
le Su
périe
34. Quelle est la puissance de la force de Lorentz ? Que peut-on dire des normes
relatives des forces électromagnétiques et gravitationnelles ?
&KDSLWUH
6929
5440
6
G
G
35. Une particule de masse m et de charge q , possède une vitesse initiale v0 = v0 u x au
point O. À partir du point O où elle passe à t = 0 , elle subit l’action d’un champ
G
électrique E uniforme et indépendant du temps.
G
G
a) Étudier le cas où v 0 et E sont colinéaires.
G
G
b) Étudier le cas où v 0 et E sont orthogonaux.
.65.2
07:1
36. Une particule de masse m et de charge q (de signe quelconque) se déplace à la
G
vitesse v0 dans un référentiel galiléen. À partir de l’instant t = 0 , elle pénètre dans
JG
G
G
G
un champ magnétique B = B u z ( B > 0) , uniforme et constant, v 0 et B sont
JG
orthogonaux. Les sources de B sont immobiles dans le référentiel déjà cité.
:160
.179
a) Montrer que la trajectoire est plane. Utiliser l’expression de l’accélération dans la
base de Frenet et montrer que la vitesse est constante en norme.
582:
8891
2320
b) Montrer que la trajectoire est un cercle. Exprimer le rayon R du cercle en
fonction de p0 (quantité de mouvement), | q | et B . Montrer que la période T est
JG
indépendante de v 0 . Dessiner la trajectoire orientée et le champ B dans le cas
G
G
q < 0 et si à t = 0 , la particule est en O avec une vitesse v0 = v0 u x .
:211
0753
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
Micro
techn
iques
La mécanique est une science fondamentalement vectorielle ; les flèches sur les
JJJJJJJJG
vecteurs sont obligatoires et une égalité du genre « vecteur = scalaire » est à
proscrire ; un effort est donc demandé sur l’exactitude et la précision des
JG
notations, car la négligence ou la désinvolture consistant à écrire F = − kx ,
G
G JG
mg + R = 0 , v = rω ,…sont mal perçues aux concours !
e Mé
caniq
ue e
t des
Ne pas confondre les points et les vecteurs, notamment un point possède des
coordonnées (qui peuvent être des grandeurs de nature différente : longueur,
abscisse, angle) mais un vecteur possède des composantes (qui ont toutes la
même unité) en projection sur une base vectorielle. Pour éviter la confusion, ne
noter en colonne que les composantes de vecteur et jamais les coordonnées
d’un point.
Ne pas utiliser le terme repère à la place de référentiel (voir question 1.).
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
Il est primordial de bien distinguer référentiel d’étude et base de projection.
Pour un mouvement donné d’un point matériel, le vecteur vitesse par exemple
est parfaitement défini, à tout instant, par choix du référentiel d’étude ; une fois
ce vecteur défini on peut le projeter sur n’importe quelle base fixe ou mobile
par rapport au référentiel. La projection sur une base fixe du référentiel (base
cartésienne) n’est absolument pas nécessaire et complique en général
inutilement les calculs.
07:1
6929
5440
6
Vitesse et accélération en physique signifie vecteur vitesse et vecteur
G
dv
accélération (ce qui diffère du langage courant). Il ne faut pas confondre
dt
dv
G
(c’est aT , accélération tangentielle, « l’accélération » du
(c’est a ) et
dt
langage courant).
:160
.179
.65.2
Il faut bien distinguer la notation r (parfois aussi notée ρ ) des coordonnées
cylindriques représentant la distance d’un point M à l’axe Oz de la notation r
en coordonnées sphériques représentant la distance du point M à l’origine O ,
comme pour les forces en 1/ r 2 .
2320
Les expressions de la vitesse et de l’accélération en coordonnées polaires
doivent être sues par cœur (voir la question 5.).
0753
582:
8891
Les équations horaires (ou paramétriques) d’un mouvement sont, par exemple
dans le plan en coordonnées cartésiennes, les relations qui donnent x(t ) et
y (t ) . La trajectoire du mobile s’obtient en éliminant le paramètre temps t , ce
qui conduit à l’équation de la trajectoire y = f ( x) .
techn
iques
:211
G
Veiller à ne pas considérer le vecteur uθ comme tangent à la trajectoire ! Ce
n’est vrai que dans le cas très particulier du mouvement circulaire, et encore en
considérant comme pôle le centre du cercle ! (voir les questions 37. et 38. pour
éviter cette erreur).
ue e
t des
Micro
Utiliser dans les exercices de cinématique la remarque de cohérence très
importante suivante : le vecteur accélération est toujours dans la concavité de
la trajectoire, c’est-à-dire du même côté que la trajectoire par rapport à la
tangente (voir question 12.).
G
G G
De même le produit scalaire : a . v indique les variations de v :
G
G
G G
G G
a . v > 0 v croît et a . v < 0 v décroît.
ure d
e Mé
caniq
Commencer par faire un dessin représentant le système à étudier. Éviter les
situations particulières : coïncidences d’axes, angles trop proches de 45° (le
sinus et le cosinus y sont trop voisins !). Toujours choisir des abscisses
positives et des angles positifs sur le schéma (en indiquant les orientations) et
inférieurs à π / 2 .
e Na
Écol
tiona
le Su
périe
Comme dans tout problème de mécanique, il faut d’abord :
Ź définir le système étudié : en général, il est évident, sauf s’il est composé de
plusieurs parties auquel cas une réflexion préalable s’impose sur les
avantages-inconvénients de telle partie du système.
&KDSLWUH
e Na
'\QDPLTXHGXSRLQWPDWpULHO
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:160
.179
.65.2
07:1
6929
5440
6
Ź préciser le référentiel d’étude ( R ) , en général le référentiel du laboratoire
(ou le référentiel
terrestre)
considéré
et qu’il
de
Ź préciser
le référentiel
d’étude
( R ) , encomme
généralgaliléen,
le référentiel
duconvient
laboratoire
représenter
symboliquement
sur
la
figure.
(ou le référentiel terrestre) considéré comme galiléen, et qu’il convient de
Ź faire
l’inventaire
des forces en
sur la figure voir conseil qui
représenter
symboliquement
surles
la représentant
figure.
suit.
Ź faire l’inventaire des forces en les représentant sur la figure voir conseil qui
suit.
Attention de ne représenter a priori sur le schéma que les forces parfaitement
n’est pas lea cas
dessur
forces
de réaction
qu’il
fautparfaitement
traiter avec
connues,
Attention ce
de qui
ne représenter
priori
le schéma
que les
forces
prudence.
connues, ce qui n’est pas le cas des forces de réaction qu’il faut traiter avec
Ź
Pour un point mobile sur un axe, la réaction normale n’est connue ni en
prudence.
direction
(elle est
dans le
est perpendiculaire)
ni en norme.
Ź Pour
un point
mobile
surplan
un auquel
axe, lal’axe
réaction
normale n’est connue
ni en
Elle
ne doit
a priori
. Elle
sera connue que
le
direction
(ellepas
estêtre
dansdessinée
le plan auquel
l’axe
estneperpendiculaire)
ni lorsque
en norme.
mouvement
sera
connu.
Elle ne doit pas être dessinée a priori. Elle ne sera connue que lorsque le
Ź Pour
un point
mobile
sur une surface, la direction de la réaction normale est
mouvement
sera
connu.
connue
mais
pas
sa
norme
; lasurface,
représenter
alors avec
une
norme normale
sans aucun
Ź Pour un point mobile sur une
la direction
de la
réaction
est
rapport
avec
les
autres
forces.
connue mais pas sa norme ; la représenter alors avec une norme sans aucun
Ź La
tension
fil : sa
direction et son sens sont connus, mais pas sa
rapport
avecd’un
les autres
forces.
norme
;
la
représenter
avec
une norme
sanssens
aucun
avec
les pas
autres
Ź La tension d’un fil : sa direction
et son
sontrapport
connus,
mais
sa
forces.
norme ; la représenter avec une norme sans aucun rapport avec les autres
Ź La
force de rappel élastique exercée par un ressort : sa direction est connue
forces.
mais
pas de
son
sens élastique
qui dépend
de l’allongement
; il est
ne connue
faut la
Ź La
force
rappel
exercée
par un ressortdu
: saressort
direction
représenter
qu’avec
prudence.
Pour
projeter,
utiliser
la
modélisation
mais pas son sens qui dépend de l’allongement du ressort ; il ne faut la
algébrique
à la prudence.
réponse de Pour
la question
19.. utiliser la modélisation
représenterdonnée
qu’avec
projeter,
algébrique donnée à la réponse de la question
JG 19..
G
Le poids se note simplement mg ; la notation JPG est inutile.
G
Le poids se note simplement mg ; la notation P est inutile.
La relation fondamentale de la dynamique (RFD) conduit à une relation
dans un référentiel
d’étude ( R(RFD)
) . Il estconduit
ensuite nécessaire
pour
vectorielle
La relationécrite
fondamentale
de la dynamique
à une relation
l’exploiter
de
la
projeter
sur
une
base
de
projection.
vectorielle écrite dans un référentiel d’étude ( R) . Il est ensuite nécessaire pour
Il faut d’abord
l’exploiter
de la choisir
projeterun
sursystème
une basededecoordonnées
projection. adapté à la géométrie du
problème
poséchoisir
(direction
privilégiée
: cartésiennes,
privilégiédu:
Il
faut d’abord
un système
de coordonnées
adapté à axe
la géométrie
cylindriques,posé
point (direction
privilégié : polaires
ou sphériques)
et exprimer
les
vecteurs:
problème
privilégiée
: cartésiennes,
axe
privilégié
G
caractéristiques
mouvement,
notamment
a , et
dans
la base
locale
cylindriques,
pointduprivilégié
: polaires
ou sphériques)
exprimer
les vecteurs
G
correspondante.
caractéristiques du mouvement, notamment a , dans la base locale
Les
projections de la relation fondamentale sont quasiment imposées en
correspondante.
dynamique
du point
il fautfondamentale
éliminer les forces
réaction, partiellement
Les projections
de lié,
la où
relation
sont de
quasiment
imposées en
inconnues,
pour
pouvoir
déterminer
le
mouvement.
dynamique du point lié, où il faut éliminer les forces de réaction, partiellement
inconnues, pour pouvoir déterminer le mouvement.
Attention aux expressions pièges « poids et réaction se compensent » ou
poids et aux
réaction
normalepièges
se compensent
invoquées
l’étude» ou
du
«Attention
expressions
« poids et» réaction
se avant
compensent
mouvement
! Elles supposent
effet que les
forces de avant
réaction
seraient
« poids et réaction
normale seencompensent
» invoquées
l’étude
du
connues
a priori,
ce qui
est évidemment
mouvement
! Elles
supposent
en effetfaux.
que Les
les forces
forces dederéaction
réactiondépendent
seraient
des
autres
forcesceetqui
duestmouvement
on de
n’yréaction
accèdedépendent
qu’après
connues
a priori,
évidemment(accélération),
faux. Les forces
l’écriture
du
principe
fondamental.
Voir
la
question
43.
pour
bien
comprendre
des autres forces etG du mouvement (accélération), on n’y accède qu’après
G
43. pour de
bien
comprendre
l’écriture
du principe
question
la
différence
entre Rn fondamental.
et − mg , ainsiVoir
que la
toutes
les questions
dynamique
du
G
G
la différence
entre Rn et − mg , ainsi que toutes les questions de dynamique du
point
lié.
point lié.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:160
.179
.65.2
07:1
6929
5440
6
Il convient de numéroter les équations scalaires, d’y faire référence lorsqu’on
les utilise, de compter le nombre d’équations et le nombre d’inconnues avant
de
Il convient
numéroter
les équations scalaires, d’y faire référence lorsqu’on
se lancerde
dans
la résolution.
les utilise, de compter le nombre d’équations et le nombre d’inconnues avant
de se lancerdifférentielle
dans la résolution.
L’équation
issue de la RFD est du second ordre et son intégration
conduit donc à l’introduction de deux constantes d’intégration (y penser !) ;
leur
L’équation
différentielle
de la une
RFDsolution
est du second
ordre
et son intégration
détermination
en vueissue
d’obtenir
physique
au problème
suppose
conduit
donc à de
l’introduction
de deux
(y penser
!) ;
la
connaissance
la vitesse initiale
et deconstantes
la positiond’intégration
initiale du mobile
étudié.
leur détermination en vue d’obtenir une solution physique au problème suppose
la connaissance
de la»vitesse
initiale
et de
position d’Archimède
initiale du mobile
étudié.
Le
« fluide déplacé
intervenant
dans
le lathéorème
est un
fluide
fictif que l’on imagine à la place de l’objet immergé. Il ne s’agit pas du
«Ledéplacement
« fluide déplacé
» intervenant
le théorème
d’Archimède
estrécipient.
un fluide
» du liquide
réel pardans
exemple
si on enlevait
l’objet du
fictif que l’on imagine à la place de l’objet immergé. Il ne s’agit pas du
« déplacementdu
» du
liquide réel
par exemple
si on enlevait
récipient.
L’application
théorème
d’Archimède
suppose
que le l’objet
corps du
envisagé
soit
entièrement immergé dans un (ou des) fluide(s), car si tel n’est pas le cas, une
partie
L’application
du théorème
supposeavec
que lelefluide
corpsconsidéré
envisagé etsoit
de la surface
du corpsd’Archimède
n’est pas en contact
le
entièrement
immergé
dans
un
(ou
des)
fluide(s),
car
si
tel
n’est
pas
le cas,
une
raisonnement consistant à traduire l’équilibre du fluide qui remplace
le corps
partieledefluide
la surface
du corps
n’est pas
en contact
dans
environnant
extérieur
ne tient
plus. avec le fluide considéré et le
raisonnement
consistant
traduire l’équilibre
Il
faut ainsi distinguer
lesàsituations
suivantes : du fluide qui remplace le corps
dans
fluideaprès
environnant
ne tient
a)
unlesolide,
avoir « extérieur
coulé » s’est
poséplus.
au fond d’un récipient rempli d’un
Il faut
ainsi; dans
distinguer
lesunsituations
suivantes
:
liquide
ce cas,
peu de liquide
subsiste
entre le solide et le fond, le
a) théorème
un solide, d’Archimède
après avoir « s’applique.
coulé » s’est posé au fond d’un récipient rempli d’un
liquide
; dans
ce cas,
unface
peu plane
de liquide
subsiste
entre
solide
et le fond,
le
b) Ce
même
solide
a une
« plaquée
» au
fondle du
récipient
(on l’a
théorème d’Archimède
s’applique.
maintenu
au fond en versant
le liquide dessus). Dans ce cas le liquide
b) Ce
même solide
a une face plane
plaquéele» au
fond du d’Archimède
récipient (on l’a
n’entoure
pas complètement
le «solide,
théorème
ne
maintenu
au
fond
en
versant
le
liquide
dessus).
Dans
ce
cas le liquide
s’applique pas.
complètement
le théorème
d’Archimède
ne
c) n’entoure
Le solide « pas
bouche
» un trou au le
fondsolide,
du récipient,
le théorème
d’Archimède
s’applique
pas.pas.
ne
s’applique
c) Le solide « bouche » un trou au fond du récipient, le théorème d’Archimède
s’applique
pas.
Le ne
théorème
d’Archimède
nécessite un état d’équilibre, on peut cependant
l’utiliser si les déplacements sont lents (dans le cas des aérostats par exemple).
Le théorème d’Archimède nécessite un état d’équilibre, on peut cependant
l’utiliser
si les déplacements
(danscinétique,
le cas des ilaérostats
parpréciser
exemple).
Avant
d’utiliser
le théorèmesont
de lents
l’énergie
faut bien
les
deux instants entre lesquels on compte l’écrire. Si toutes les forces qui
interviennent
Avant d’utiliser
théorème de (notamment
l’énergie cinétique,
il faut
bien qui
préciser
les
sontleconservatives
les champs
de force
dérivent
deux
instants
entre
lesquels
on
compte
l’écrire.
Si
toutes
les
forces
qui
d’une énergie potentielle), alors la conservation de l’énergie mécanique
interviennent
(notamment
les champs
de (il
force
dérivent
s’impose
car sont
elle conservatives
conduit en général
à moins
d’erreurs
est qui
plus
facile
d’une énergie
potentielle),
alors
la conservation
de l’énergie
mécanique
d’écrire
la variation
d’énergie
potentielle
de pesanteur
que de recalculer
le
s’impose
car elle conduit en général à moins d’erreurs (il est plus facile
travail
du poids…).
d’écrire la variation d’énergie potentielle de pesanteur que de recalculer le
travail du poids…).
L’énergie
potentielle de pesanteur augmente avec l’altitude ; l’écriture
E p = mgz suppose l’axe Oz suivant la verticale ascendante, il reste à préciser
le
L’énergie potentielle de pesanteur augmente avec l’altitude ; l’écriture
choix de l’origine de cette énergie potentielle.
E p = mgz suppose l’axe Oz suivant la verticale ascendante, il reste à préciser
choix
de l’origine
de d’une
cette énergie
potentielle. à un support fixe à l’aide d’un
le
Dans
le cas
particulier
masse suspendue
fil inextensible (pendule), la tension du fil exercée sur la masse est radiale alors
Dans le cas particulier d’une masse suspendue à un support fixe à l’aide d’un
alors
fil inextensible (pendule), la tension du fil exercée sur la masse est radiale&KDSLWUH
&KDSLWUH
que la vitesse de celle-ci est orthoradiale (puisque le fil est de longueur
constante) : la tension ne travaille donc pas. C’est le cas aussi d’une réaction
normale, dans le référentiel lié au support, en l’absence de frottement.
6929
5440
6
Le contact d’un mobile avec un support est rompu lorsque la réaction normale
G
Rn qu’exerce le support sur le mobile s’annule.
0753
582:
8891
2320
:160
.179
.65.2
07:1
Pour un système conservatif à un paramètre, l’équilibre se traduit sur son
dE p
dE p
énergie potentielle par
= 0 en variable linéaire x , ou
= 0 en variable
dx
dθ
angulaire θ (on dérive par rapport à une variable spatiale pour chercher une
position d’équilibre).
dE p
Il ne faut pas dériver par rapport au temps :
= 0 (confusion avec
dt
dEméc.
= 0 où l’on dérive par rapport au temps pour déterminer l’équation du
dt
mouvement, si le système est conservatif).
dE p
L’écriture
( xe ) = 0 signifie qu’on a d’abord dérivé par rapport à x , puis
dx
on y a porté x = xe , et pas l’inverse !
:211
Le champ électrique est toujours orienté vers les potentiels décroissants ; on dit
couramment « du + vers le − ».
ue e
t des
Micro
techn
iques
Dans l’étude du mouvement d’une particule chargée soumise à un champ
G JG
G
magnétique, la force magnétique est qv ∧ B (avec v a priori inconnue), et pas
G JG
G
qv0 ∧ B (avec v 0 ) qui ne sert qu’à la fin du calcul pour trouver le centre du
cercle.
$SSOLFDWLRQVGLUHFWHVGXFRXUV
caniq
&LQpPDWLTXHGXSRLQW
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
37. On repère la position d’un point M se déplaçant dans un plan par ses coordonnées
polaires r et θ de pôle O. L’allure de la trajectoire pour θ variant de 0 à 2π est :
B
•
M
•
6929
5440
6
D
⊕
r
07:1
θ
axe polaire
A
.65.2
O
0753
582:
8891
2320
:160
.179
Il décrit une spirale logarithmique d’équation : r = a e −θ dans le sens des θ
croissants, avec a constante positive.
1. Dans un premier temps la loi horaire est θ = ω t où la vitesse angulaire ω est
une constante positive.
G G
a) Dessiner aux points A, B et D les vecteurs de la base locale ( u r , uθ ) .
b) Exprimer dans cette base locale les vecteurs vitesse et accélération du point
matériel.
c) Calculer la norme du vecteur vitesse. Le mouvement est-il uniforme ?
d) Donner les composantes du vecteur vitesse aux points :
A ( θ = 0 ) et D ( θ = π 2 ) en fonction de a et ω ,
iques
:211
et celle du vecteur accélération aux mêmes points en fonction de a et ω 2 .
En précisant l’échelle choisie pour aω et aω 2 , dessiner les vecteurs vitesse et
accélération aux points A et D. Commenter.
techn
2. Dans un deuxième temps le mouvement est uniforme de vitesse v 0 . Trouver la
loi horaire vérifiée par θ en prenant θ = 0 pour t = 0 .
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
38. Le point M de la question précédente décrit maintenant une trajectoire d’équation
r = d cos θ avec d constante positive et θ ∈ [ − π 2 , π 2 ] ; son allure est donnée
ci-après.
La loi horaire est θ = ω t où la vitesse angulaire ω est une constante positive.
&KDSLWUH
6929
5440
6
⊕
M
•
A
.65.2
θ
07:1
r
axe polaire
8891
2320
:160
.179
O
0753
582:
•
B
iques
:211
G G
a) Dessiner aux points A et B les vecteurs de la base locale ( u r , uθ ) .
b) Exprimer dans cette base locale les vecteurs vitesse et accélération du point
matériel.
c) Donner les composantes du vecteur vitesse aux points A ( θ = 0 ) et
techn
B ( θ = − π 4 ) en fonction de d et ω , et celle du vecteur accélération aux
ue e
t des
Micro
mêmes points en fonction de d et ω 2 . En précisant l’échelle choisie pour d ω et
d ω 2 , dessiner les vecteurs vitesse et accélération aux points A et B.
d) Calculer la norme du vecteur vitesse. Le mouvement est-il uniforme ?
Calculer la norme du vecteur accélération et déterminer le rayon de courbure de
cette trajectoire en un point quelconque. Interpréter ce résultat.
caniq
/RLVGH1HZWRQHWPRGpOLVDWLRQGHVIRUFHV
périe
ure d
e Mé
39. Une tige rectiligne verticale, de longueur l = 80 cm , lâchée avec une vitesse initiale
nulle, tombe en chute libre dans le vide. Elle passe, au cours de sa chute, par un trou
ménagé dans une plaque horizontale de faible épaisseur. Quand son extrémité
inférieure atteint le trou, sa vitesse est v = 5, 0 m.s −1 .
– quelle est sa vitesse v′ lorsque son extrémité supérieure sort du même trou ?
– quelle est la durée T du passage de la tige à travers le trou ?
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
40. Exprimer l’énergie mécanique de l’oscillateur harmonique décrit à la question 19..
6929
5440
6
Montrer que l’on peut retrouver, à partir de cette énergie, l’équation différentielle du
mouvement donnée par la relation fondamentale de la dynamique.
Montrer que la valeur de l’énergie mécanique est fixée par l’amplitude du
mouvement harmonique.
.65.2
07:1
41. On étudie le mouvement d’une balle, assimilable à un point matériel libre, dans le
référentiel terrestre galiléen. Sa trajectoire est rectiligne, suivant la verticale du lieu
Oz orientée vers le haut. On donne la trajectoire de phase ci-dessous : z en fonction
de z. Les graduations sont en mètre pour z et mètre par seconde pour z . Décrire le
plus précisément possible le mouvement de la balle et ce que l’on peut en déduire
sur les forces qu’elle subit.
dz
z
iques
:211
0753
582:
8891
2320
:160
.179
dt
Micro
techn
42. Une bille de masse m est accrochée à l’extrémité d’un fil de
masse négligeable, de longueur l et suspendu en un point O
fixe du référentiel terrestre galiléen. On fait l’hypothèse d’un
mouvement plan du pendule.
ue e
t des
a) On lâche la bille avec une vitesse nulle dans une position
initiale faisant un angle θ 0 avec la verticale. Quelle est sa
vitesse lors de son passage par la position verticale ?
O
G
g
θ
•
m
caniq
b) Développer une méthode énergétique pour l’étude du mouvement. Établir la
période de ce pendule, en considérant que θ reste petit.
ure d
e Mé
c) On lâche maintenant la bille avec une vitesse nulle dans une position initiale
faisant un angle θ 0 = π 2 avec la verticale. Exprimer, en fonction de θ la tension
du fil à tout instant ; quelle est sa norme au passage par la verticale, commenter.
e Na
Écol
tiona
le Su
périe
43. Une tige rectiligne Δ (axe Ox) horizontale tourne autour d’un axe vertical OZ avec
une vitesse angulaire constante θ = cste = ω , θ = (OX , Ox) ; (OXYZ) est un repère
fixe du référentiel ( R ) galiléen. Sur la tige Δ , peut coulisser sans frottement un
anneau de masse m, assimilable à un point matériel.
&KDSLWUH
a) Déterminer l’équation polaire r (θ ) {c’est-à-dire x(θ ) } de la trajectoire de
l’anneau dans le référentiel ( R) . À t = 0 , x = x 0 et x = 0 .
G
b) En déduire la réaction R appliquée par la tige sur l’anneau.
6929
5440
6
3RXVVpHG·$UFKLPqGH
07:1
44. À quelle condition un corps solide de masse volumique ρ s flotte-t-il sur un liquide
de masse volumique ρl ? Une bille de fer flotte-t-elle sur le mercure ?
.179
.65.2
45. Quel est en pourcentage, le volume immergé d’un iceberg sachant que
ρ glace = 0,92 g.cm −3 ?
582:
8891
2320
:160
46. Un bouchon cylindrique de bouteille de vin flotte sur l’eau ; on le tire légèrement
vers le haut et on le lâche. En supposant que l’axe du bouchon reste vertical,
déterminer la période de ses oscillations et proposer une application numérique.
En pratique, l’expérience montre que l’axe du bouchon en équilibre est plutôt
horizontal. Reprendre le calcul en considérant qu’à l’équilibre la moitié du bouchon
est immergée et que le déplacement initial est très petit par rapport au rayon.
Proposer une application numérique.
0753
eQHUJLHPpFDQLTXH
ue e
t des
Micro
techn
iques
:211
47. Un point matériel est mobile sans frottement sur un plan horizontal ; on repère sa
position par des coordonnées polaires de pôle O. Il est soumis à une force qui dérive
1
K
de l’énergie potentielle E p = K 1 r 2 + 2 , où r est la coordonnée distance du
2
r
point matériel au point O ; K 1 et K 2 sont deux constantes positives.
JJJJG
a) Exprimer cette force en admettant qu’elle est constamment colinéaire à OM .
Montrer que, par rapport au point O, cette force est répulsive à faible distance et
attractive à grande distance.
b) On fixe maintenant l’angle θ , le problème est alors à un paramètre : r.
Déterminer la (ou les) position(s) d’équilibre du point. Étudier leur stabilité.
caniq
48. Un point matériel, de masse m, est mobile sans frottement sur un axe horizontal et
soumis à un champ de force conservatif qui dérive de l’énergie potentielle E p ( x)
dont le graphe, à l’échelle, est donné ci-dessous :
e Mé
Si l’énergie mécanique E du point matériel a pour valeur E1 telle que E1 = U m 2 ,
ure d
mesurer sur le graphe les valeurs approchées possibles de x en fonction de x m .
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
Si l’énergie mécanique E a pour valeur E 2 telle que 0 < E 2 < U M , le système est-il
en état lié ou de diffusion ?
Quelle vitesse (norme et sens) doit avoir le point matériel, placé en x = x m , pour
s’échapper à l’infini ? Exprimer cette vitesse de libération en fonction de U m , U M
et m.
6929
5440
6
Ep
xm
xM
x
:160
.179
.65.2
O
07:1
UM
2320
Um
582:
8891
49. L’équation du mouvement de l’oscillateur harmonique de la question 19. est-elle
changée si le dispositif qui était horizontal est à présent vertical ? Expliquer
soigneusement.
Micro
techn
iques
:211
0753
50. Un plateau oscillant horizontal P est animé d’un
M
P
mouvement sinusoïdal vertical d’amplitude a et de
G
z = a cos ω t
pulsation ω . Un corps M de masse m est posé sur P .
g
* Calculer la pulsation critique ω0 en-dessous de
laquelle M ne décolle jamais de P ; quelle est alors l’accélération du plateau, à
tout instant et sa valeur maximale ?
* Pour ω > ω0 (on peut prendre par exemple ω = 2ω0 ), décrire qualitativement ce
qui se passe si on pose le corps M sur P à t = 0 précisément.
ue e
t des
0RXYHPHQWVGHSDUWLFXOHVFKDUJpHV
e Mé
caniq
51. Un électron libre, de vitesse initiale négligeable, est d’abord accéléré sous une
différence de potentiel ΔV = 10 kV . Quelle est alors sa vitesse v0 au moment où il
est injecté dans un appareil de Crookes dans lequel règne un champ magnétique
B = 5.10−3 T ? Que valent le rayon R du cercle trajectoire ainsi que la période T
du mouvement ?
y
e Na
Écol
tiona
le Su
périe
ure d
52. Des particules de charge q > 0 pénètrent avec une
G
vitesse v , dans un espace où règne un champ d
électrique uniforme, créé par deux plaques
conductrices chargées distantes de d. La d.d.p. entre
les plaques est U. Il règne aussi dans le même
espace un champ magnétique uniforme orthogonal à
G
v.
F
G
v
: Oz
G
E
x
&KDSLWUH
4
2
b) Le faisceau est constitué d’ions
6929
5440
6
G
a) Montrer que pour une valeur particulière v 0 de v et en choisissant le sens de
G
B , les particules peuvent avoir un mouvement rectiligne uniforme et passer par
la fente F.
A.N. : B = 0,10 T ; E = 1, 0.10 4 V.m −1
He 2+ et 23 He 2+ , de masses respectives
.65.2
07:1
m1 = 6, 6.10 −27 kg et m 2 = 5, 0.10 −27 kg . Ces ions, avant d’arriver dans le
dispositif, ont été accélérés, à partir d’une vitesse négligeable, sous une même
tension U 0 . Montrer qu’en choisissant convenablement U, on peut recueillir l’un
ou l’autre des isotopes en F.
A.N. : U 1 = 100 V permet de recueillir 42 He 2+ , quelle valeur U 2 de U permet-
.179
elle de recueillir 23 He 2+ ?
iques
:211
0753
582:
8891
2320
:160
G
G
53. Dans le demi-espace x > 0 , règne un champ magnétique uniforme B1 = B0 u z , et
G
B G
dans le demi-espace x < 0 , règne un champ magnétique uniforme B 2 = 0 u z . Une
2
particule de masse m et charge q > 0 est placée au point origine O, à t = 0 , avec
G
G
une vitesse v = v 0 u x , v 0 > 0 .
a) Décrire et dessiner la trajectoire de la particule.
b) Définir et calculer la vitesse de « dérive » dans la direction Oy.
c) Reprendre les calculs avec dans le demi-espace x < 0 un champ magnétique
G
G
uniforme B2 = − B0 u z .
techn
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
ure d
e Mé
caniq
ue e
t des
Micro
54. Quels sont les ordres de grandeur des durées suivantes ?
a) la période d’un électron autour d’un proton dans l’atome d’hydrogène
b) le temps de pose d’un appareil photo
c) la durée moyenne d’utilisation d’un sac plastique, le temps moyen de survie sur
la bande d’arrêt d’urgence d’une autoroute
d) la période d’un satellite de basse altitude
e) la durée du mandat d’un maire, la durée de la cotisation pour une retraite à taux
plein, l’échéance prévisionnelle d’épuisement des ressources en hydrocarbures
f) le temps de demi-vie du carbone 14 (qui sert aux datations), l’âge de la grotte
Cosquer
g) l’apparition de l’homme sur Terre
h) la période de révolution du Soleil autour du centre galactique
i) l’âge de la Terre, de l’Univers
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
55. Quels sont les ordres de grandeur des distances suivantes ?
a) la taille des objets étudiés en nanotechnologie
b) la taille d’un globule rouge
c) l’épaisseur d’une feuille d’aluminium alimentaire, d’une feuille de papier
6929
5440
6
d) le diamètre d’un cheveu
e) la taille du plus grand poisson, de l’arbre le plus haut
f) l’altitude de vol d’un avion commercial
g) l’altitude de la station orbitale ISS (station spatiale internationale)
h) les distances Terre-Lune et Terre-Soleil
i) la distance de l’étoile la plus proche du système solaire
0753
582:
8891
2320
:160
.179
.65.2
07:1
56. Quels sont les ordres de grandeur des vitesses suivantes ?
a) la vitesse de croissance par jet atomique sur un substrat monocristallin
b) la vitesse d’éloignement de la Lune par rapport à la Terre, la vitesse
d’éloignement de l’Amérique par rapport à l’Afrique dans la dérive des
continents
c) la vitesse d’ascension d’un parapente, la vitesse moyenne lors d’une course de
100 m (record du monde 9, 58 s établi par Usain Bolt en 2009)
d) la vitesse de l’air dans le nez lors d’un éternuement, la vitesse d’un avion à
l’atterrissage
e) la vitesse linéaire de l’étoile 51 Peg. dans son mouvement dû à l’existence de la
première planète extra solaire découverte
f) la vitesse du son dans l’air, la vitesse moyenne des molécules dans l’air
g) la vitesse d’un satellite de basse altitude
h) la plus grande vitesse atteinte par un objet macroscopique de fabrication humaine
i) la vitesse de la lumière dans le vide
:211
57. L’accélération s’exprime en « mètres par secondes au carré » ; comment faut-il
comprendre physiquement « au carré » ?
Micro
techn
iques
58. On imagine l’expérience suivante : une corde est tendue sur le pourtour de la Terre,
supposée sphérique, à même le sol, dans un plan méridien ; on rajoute ensuite 1 m
supplémentaire de corde et la nouvelle corde est alors disposée de manière circulaire
de telle sorte que son centre coïncide avec celui du modèle sphérique de la Terre. De
combien s’est-elle élevée du sol ? Commentaire.
ue e
t des
59. Comment peut-on comprendre qu’un mobile en mouvement circulaire, même
uniforme, soit soumis à une accélération ?
le Su
périe
ure d
e Mé
caniq
60. En 1604, Galilée par sa loi de la chute des corps apprivoise le temps (pour la
première fois dans l’histoire des sciences) en en faisant une variable mathématique
(avant la mécanique de Newton) : « Dans le vide, la vitesse acquise est
proportionnelle à la durée de chute et indépendante de la masse et de la nature du
corps » (d’où z = gt 2 /2 ). Résultat capital qui vient contredire la théorie d’Aristote
sur le mouvement, laquelle postulait depuis près de deux millénaires que « la vitesse
de chute était d’autant plus élevée que le corps était massif ». Selon Aristote donc,
une grosse boule tombe plus vite qu’une petite plus légère. Galilée imagine alors
l’expérience de pensée suivante : il relie les deux boules par une corde…Par quel
double raisonnement sur ce système arrive-t-il à rendre la théorie d’Aristote
contradictoire ?
e Na
Écol
tiona
61. Un système fermé est évidemment de masse constante, la réciproque est-elle vraie ?
&KDSLWUH
62. Deux ressorts (de même longueur) ont des constantes de raideur k1 et k2 > k1 ;
lequel est le plus facile à comprimer ?
6929
5440
6
63. Si on coupe un ressort en deux parties inégales, les deux ressorts obtenus auront-ils
la même constante de raideur ?
.65.2
07:1
64. Le balancier d’une horloge (à l’ancienne) est un pendule mobile autour d’un axe
horizontal passant par le point O et constitué d’une tige et d’un poids de centre de
masse G ; la distance OG est variable car le poids est calé au moyen d’une vis
réglable. L’horloge avance ; que faut-il faire ?
2320
:160
.179
65. L’histoire raconte que le roi Hiéron possède une couronne qui pèse bien le « poids »
d’or qu’il a donné à son bijoutier mais il n’est pas sûr que ce dernier ne l’ait pas
trompé en incorporant à la couronne d’autres matériaux que de l’or pur. Il demande
à Archimède de s’en assurer sans refondre la couronne. Comment ce dernier
procède-t-il ?
582:
8891
66. Lorsqu’un corps flotte sur un liquide surmonté d’une atmosphère, la poussée
d’Archimède est en général évaluée en ne considérant que le poids du liquide
déplacé ; pourquoi ?
iques
:211
0753
67. Un verre contient de l’eau avec un glaçon ; après la fonte du glaçon le niveau d’eau
dans le verre a-t-il monté ou baissé ?
Pourquoi alors prévoit-on que le réchauffement climatique et la fonte des glaces
entraînera une élévation du niveau des mers ?
Micro
techn
68. On dépose une bille d’acier dans une coquille de noix flottant à la surface libre de
l’eau contenue dans un récipient. On repère alors le niveau de l’eau sur les parois du
récipient. Si la bille est ensuite sortie de la coquille et plongée dans l’eau, comment
évolue le niveau de la surface libre ?
ue e
t des
69. Pour éviter de couler en faisant la planche dans une piscine d’eau douce, il est
préférable de gonfler ses poumons d’air ; expliquer. Pourquoi cela n’est-il pas
nécessaire dans une piscine remplie d’eau de mer ?
caniq
70. Comment un sous-marin en eaux profondes procède-t-il pour remonter en surface ?
e Mé
71. Citer deux exemples de force non conservative, une qui diminue l’énergie
mécanique et une qui l’augmente.
ure d
72. Si l’on considère que l’écriture du travail élémentaire δ W d’une force sous la forme
− dE p établit qu’elle dérive d’une énergie potentielle, pourquoi la relation issue du
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
théorème de l’énergie cinétique (valable pour une force quelconque !) δ W = dE c
n’a évidemment pas cette signification ?
73. Le mouvement plan d’un point matériel, repéré par des coordonnées polaires, est
décrit par les trajectoires de phase ci-dessous.
θ
6929
5440
6
r
θ0
θ
a
07:1
O
r
.65.2
O
2320
:160
.179
a) Montrer que la position r = 0 est une position d’équilibre instable.
b) Montrer que le point matériel peut avoir une trajectoire circulaire.
c) Donner l’allure des trajectoires dans le plan du mouvement et décrire ce
mouvement en considérant à l’instant initial r (0) = r0 > a , puis r (0) = r0 < a .
0753
582:
8891
74. Expliquer qualitativement pourquoi la chute « libre » avec frottement de l’air
conduit à une vitesse limite. Exprimer cette vitesse limite dans les deux cas de
modélisation vus à la question 17..
G
En considérant un modèle de frottement en −λ v pour le mouvement étudié à la
question 41., donner une valeur approchée du coefficient λ (on prend : m = 100 g ).
iques
:211
75. Un mobile soumis à la pesanteur et à une force de frottement fluide opposée à la
vitesse est lancé avec une vitesse initiale inclinée d’un angle sur l’horizontale. Quel
raisonnement simple (les calculs de trajectoire sont superflus…) permet de prouver
que sa vitesse (en norme) est minimale après le sommet de la trajectoire ?
Micro
techn
76. Montrer que l’énergie potentielle d’une charge test placée en un point de l’espace où
JG
règne un champ E s’identifie au travail d’un opérateur pour l’amener de manière
JG
G
quasi statique de l’infini à la position finale r dans le champ E .
ue e
t des
77. Quelle est la vitesse acquise par un électron (initialement de vitesse négligeable)
accéléré sous une différence de potentiel de 250 kV ? Commentaire.
e Mé
caniq
78. Pourquoi les champs magnétiques sont-ils si utiles dans les « accélérateurs » de
particules ? Et pour quelle raison les électroaimants conventionnels ont-ils été
remplacés par des aimants supraconducteurs ?
ure d
([HUFLFHV
e Na
Écol
tiona
le Su
périe
79. (MPSI)Cinématique d’un satellite terrestre (*)
Un satellite artificiel, assimilé à un point matériel M, est en orbite autour de la Terre.
Il décrit, dans un référentiel lié au centre de la Terre O et à des axes Ox, Oy et Oz
&KDSLWUH
07:1
6929
5440
6
dirigés vers des étoiles lointaines, une trajectoire plane. Il est repéré par ses
coordonnées polaires r et θ de pôle O.
⊕
Sa trajectoire est une ellipse d’équation :
M
p
r =
où p et e sont deux
r θ
1 + e cos θ
x
A
P
constantes positives caractéristiques de la
O
axe polaire
trajectoire : p est appelé le paramètre et e
l’excentricité. La trajectoire est décrite dans
a
a
le sens des θ croissants.
2320
:160
.179
.65.2
a) Déterminer les expressions littérales de p et e en fonction de rP et rA (cf. figure),
P est le point de l’ellipse le plus près du point O et A en est le point le plus
éloigné. Faire les applications numériques en prenant :
a = 16. 10 3 km et OP = 8,0.10 3 km .
b) Dans ce type de mouvement, l’accélération est radiale. Démontrer qu’alors la
quantité r 2 θ reste constante au cours du mouvement ; on la note C.
Montrer que dans ces conditions les vitesses en P et A sont orthoradiales.
Exprimer C en fonction de rP et de v P norme du vecteur vitesse en P. En déduire
8891
la valeur numérique de C. Donnée : v P = 8,6 km.s −1 .
582:
c) Déterminer puis calculer v A , la vitesse de M au point A. Comparer cette vitesse à
0753
v P et commenter.
JJJJG
iques
:211
d) Exprimer la surface « balayée » par le vecteur position OM pendant dt. En
utilisant le résultat établi au b), justifier que le satellite décrive son orbite suivant
la loi de aires : le vecteur position balaye des aires égales pendant des durées
égales. Interpréter alors le résultat du c).
ure d
périe
le Su
tiona
A
z
B
D
α
M
⊕
θ
α
e Na
'\QDPLTXHGXSRLQWPDWpULHO
JG
VA
Écol
81. Franchissement d’une bosse
Un palet M de masse m,
assimilé à un point matériel, est
lancé sur une piste contenue
dans un plan vertical. Elle est
composée
d’une
portion
rectiligne AB, inclinée d’un
angle α par rapport à
e Mé
caniq
ue e
t des
Micro
techn
80. Looping dans une gouttière
A
Une gouttière a l’allure ci-contre :
B
On lâche un point matériel de masse m, du point
•
B avec une vitesse initiale nulle. Le mouvement
se fait sans frottements et dans le plan vertical.
a
O
De quelle hauteur h doit-on lâcher le point
h
matériel pour qu’il effectue un tour complet du
cercle intérieur (c’est-à-dire pour qu’il passe le
point A) ?
Pour quelles valeurs de h, le point matériel quitte-t-il la gouttière dans la partie
circulaire ? Dans ce cas, donnez la relation entre h et le point de « décollage ».
O
C
6929
5440
6
l’horizontale, et d’une portion circulaire BC, tracée sur une sphère, de rayon R et
n = π 2 + α (cf. figure). α est un angle arithmétique, non orienté. Le
d’angle BOC
palet initialement lancé depuis A avec une vitesse de norme V A et glisse sans
frottement sur la piste. On désigne par g la norme du champ de pesanteur.
a) Montrer que le palet ne peut pas décoller entre A et B.
b) À quelle condition sur V A , le point B est-il atteint ?
07:1
c) À quelle condition sur V A n’y aura-t-il pas de décollage avant le sommet de la
sphère ?
.179
.65.2
d) Le palet ayant franchi le sommet sans décoller, pour quelle valeur θd de θ
quittera-t-il la piste après le sommet ? Comparer θ d et α .
G
g
L
m
L
iques
techn
ue e
t des
Faire l’AN avec ρ liq = 1, 0 10 3 kg.m −3 et
h0
ρ glace = 0, 92 10 3 kg.m −3 .
h0
Micro
83. Fonte d’un glaçon
Un récipient cylindrique en verre de rayon R
contient un glaçon de volume V0 et de l’eau
liquide. La hauteur initiale de l’eau dans le verre
est h0 (voir figure 1).
a) Calculer le volume immergé Vim du glaçon.
:211
0753
582:
8891
2320
:160
82. Un pendule tournant
Une bille, masse m, est attachée à deux fils inextensibles, de z
longueur L, fixés en A et B tels que AB = L .
La bille convenablement lancée, puis abandonnée, a un A
mouvement circulaire uniforme dans un plan horizontal (les fils
étant tendus).
L
a) Exprimer la tension de chaque fil en fonction de m, L, g et ω ,
vitesse angulaire du mouvement circulaire de la bille.
B
b) Quelle est la vitesse angulaire minimale pour que les fils
restent tendus ?
fig.1
fig.2
e Mé
caniq
b) Le glaçon fond et la hauteur d’eau dans le verre devient h1 . Calculer h1 − h0 .
c) Pour une expérience analogue avec de l’eau salée (le glaçon reste composé d’eau
douce), la hauteur finale de l’eau dans le verre sera-t-elle changée, et si oui, dans
quel sens ?
d) On reprend l’expérience avec de l’eau douce et un glaçon de même volume V0 ,
e Na
Écol
tiona
le Su
périe
ure d
mais contenant une petite bille de liège (voir figure 2). On note Vliège et ρ liège le
volume et la masse volumique de la bille. Calculer le nouveau volume immergé
du glaçon et la variation h2 − h0 de la hauteur d’eau après la fonte du glaçon.
&KDSLWUH
84. Oscillations amorties d’un plateau
Une boule (de pâte à modeler) de masse m = 250 g tombe en
m
chute libre (vitesse initiale nulle) d’une hauteur h 0 = 40 cm sur
h0
un plateau immobile, de masse négligeable, et supporté par un
h2
ressort. On considère, qu’au moment du contact, il n’y a pas de
0
perte d’énergie mécanique. La boule a donc la même vitesse
h1
juste avant le contact et juste après lorsqu’elle est solidaire du
G
plateau et se met à osciller avec lui.
g
k
−1
a) Sachant que le ressort a pour raideur k = 500 N.m ,
déterminer la hauteur h 1 dont s’affaisse le plateau. Quelle
est la hauteur maximale h 2 atteinte par la boule lors des
oscillations ? Commentaire.
b) En réalité les oscillations sont amorties et le système finit par s’immobiliser.
Calculer la hauteur d’équilibre h e et commenter la relation entre h 1 , h 2 et h e .
En déduire la variation d’énergie mécanique ΔE du système entier entre la
situation h 0 et la situation h e ; commenter son signe.
2320
:160
.179
.65.2
07:1
6929
5440
6
•
iques
:211
0753
582:
8891
85. Équilibre de masses chargées électriquement
Deux particules ponctuelles P1 et P2 de charge q1 et q 2 (algébriques) interagissent
par une force électrostatique. La force exercée par P1 sur P2 est :
G
q1q 2 G
f 12 =
u12
4π ε 0 r 2
G
où r est la distance entre les deux points et u12 un vecteur
A
L
B
unitaire dirigé de P1 vers P2 . La constante 1 4π ε 0 vaut
caniq
ue e
t des
Micro
techn
9,0.10 9 u.SI .
L
L
Les deux particules P1 et P2 de même masse m = 10 g et de
même charge q en valeur absolue sont suspendues à des fils de
P1 •
• P2
longueur L = 30 cm . Les points d’ancrage A et B des fils
d
sont distants également de L . À l’équilibre, la distance entre
les particules est d = 20 cm .
a) Que peut-on dire du signe des deux charges ? Quel est l’angle α que font les fils
avec la verticale ?
b) Calculer q .
c) Déterminer la tension d’un fil à l’équilibre.
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
86. Pendule contrarié
Une masse ponctuelle m est accrochée à l’aide d’un fil sans
masse de longueur l au point fixe O ; on la lâche avec une
vitesse nulle et avec un angle θ0 . On suppose le mouvement
dans un plan vertical. À la verticale de O , en un point A à la
distance h < l , est fixé un clou, de section négligeable (on
suppose que m a la même vitesse juste avant et juste après le
contact du fil en A).
G
g
O
h
A ×
θ0
l
m
À quelle condition sur θ0 , la masse fait-elle un tour entier autour de A , fil tendu ?
.179
.65.2
07:1
6929
5440
6
87. (MPSI) Le mouvement d’un pendule simple est-il plan ? (*)
z
Un pendule simple est constitué d’une masse ponctuelle m
accrochée à un fil inextensible de longueur L. Ce fil est fixé à un O
G
g
point O fixe dans le référentiel terrestre galiléen.
La position de m est repérée par l’angle θ que forme le fil avec la
verticale Oz (voir figure). L’exercice se propose de démontrer que
θ
si la masse m est lâchée, écartée de θ 0 , avec une vitesse initiale
m
nulle, alors le mouvement est plan dans le plan défini par la
direction initiale du fil et la verticale.
On utilise des coordonnées cylindriques d’axe Oz , notées r, ϕ et z.
a) Représenter sur un schéma clair ces coordonnées et montrer que r = L sin θ .
G
b) Projeter la relation fondamentale de la dynamique, appliquée à m, sur u ϕ et en
:160
dϕ
.
dt
c) En déduire qu’avec les conditions initiales choisies, le mouvement est plan.
Quelles conditions initiales plus générales entraînent un mouvement plan du
pendule ?
582:
8891
2320
déduire une relation simple entre r et
techn
iques
:211
0753
88. Rebonds d’une balle : portrait de phase
Une balle en caoutchouc de masse m est considérée comme un point matériel.
L’étude du mouvement s’effectue dans le référentiel terrestre galiléen. L’axe Oz
étant dirigé suivant la verticale ascendante.
JJG
À l’instant initial, t = 0 , on lance la balle M avec une vitesse v0 suivant l’axe Oz
ascendant à partir d’un point de hauteur h par rapport au sol, on prendra h = 1, 0 m .
On néglige tout frottement.
a) Déterminer, en fonction de g , v 0 et t, les expressions de la vitesse vz ( t ) = dz / dt
Micro
et de la position z ( t ) . Préciser les expressions de la norme notée vs de la vitesse
et de l’instant t s quand la masse touche le sol, en fonction de v 0 , g et h.
ue e
t des
b) Donner une expression de z en fonction de vz , v0 et h. Étudier et tracer la courbe
z (v z ) .
c) Déduire simplement du graphe précédent, la trajectoire de phase v z en fonction
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
de z pour t ∈ [ 0, ts ] . On précisera les points remarquables.
&KDSLWUH
z
m.s −1
A
6929
5440
6
D
G
E
B
m
.65.2
H
07:1
z
:160
.179
I
2320
F
8891
C
0753
582:
d) On donne ci-dessus la trajectoire de phase pour une durée supérieure à t s .
Justifier le sens de parcours ABCDEFGHI . Comment expliquer le passage de C
à D ? Comment déduit-on du graphe que l’énergie mécanique de la balle diminue
sur une durée supérieure à t s ? Estimer la perte d’énergie mécanique entre C et D
iques
:211
(on prendra m = 0,10 kg et g = 10 m.s −2 ). Entre quels autres points peut-on
retrouver cette diminution d’énergie ?
e Mé
caniq
ue e
t des
Micro
techn
89. Molécule diatomique
On considère une molécule diatomique formée de deux atomes M 1 et M 2
ponctuels, partiellement ionisés et de charges respectives q1 = +δ e et q 2 = −δ e .
L’énergie potentielle d’interaction entre les atomes est assez bien représentée par :
δ2e2
A
+ 9 , avec A constante positive et r la distance M 1M 2 .
U (r ) = −
4 π ε0 r r
Pour simplifier M 1 est immobile dans un référentiel galiléen, et l’étude concerne le
mouvement de M 2 (de masse m) sur un axe passant par M 1 et fixe dans ce
référentiel galiléen. La seule force s’exerçant sur M 2 est donc due à M 1 et dérive
de l’énergie potentielle d’interaction.
ure d
a) Indiquer si chacun des termes de l’énergie potentielle correspond à une force
attractive ou répulsive. Donner une signification physique de ces termes.
b) Donner l’allure du graphe de U (r )
périe
c) Donner la valeur r = re à l’équilibre. L’équilibre est-il stable ?
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
d) Exprimer au voisinage de la position d’équilibre.
6929
5440
6
§ df ·
(utiliser pour cela f (re + dr ) = f (re ) + ¨ ¸ dr )
© dr ¹ re
Identifier avec une force de rappel élastique, comment s’exprime la constante de
raideur k correspondante en fonction de δ e , ε 0 et re ?
e) Trouver la fréquence de vibration de la molécule en fonction de δ e , ε 0 , re et m .
P
.179
.65.2
07:1
90. Sélecteur de masse (*)
Des ions or Au + sont produits juste avant le point I avec
une vitesse négligeable ; ils sont d’abord accélérés par un
JG
champ électrique uniforme E dans la zone entre I et O ,
JG
puis déviés par un champ magnétique uniforme B dans le
secteur de centre C entre O et P .
JG
a) Quel doit être le sens du champ E ? Donner la valeur
numérique de la vitesse v0 des ions au passage par O ,
sachant que les plans équipotentiels perpendiculaires à
IO sont aux potentiels VI = 0 et VO = − 46,3 kV , et que
C
2320
:160
O
I
−1
0753
582:
8891
la masse molaire de l’or est M Au = 197 g.mol .
JG
b) Quel doit être le sens du champ B pour que les ions soient déviés comme sur la
figure ? Quel doit être la valeur de sa norme B pour que C soit le centre de la
trajectoire sachant que r0 = CO = 0,5 m ?
techn
iques
:211
Il peut exister dans le jet initial, des ions de même charge que les ions Au + , mais de
masse voisine, extraits et accélérés en même temps que ces derniers. Le tableau
197
200
périodique donne : 195
78 Pt , 79 Au et 80 Hg .
c) Expliquer en quoi ce système d’accélération et de déflexion joue le rôle de
sélecteur de masse. Comment r0 dépend-il de m ? Faire une figure avec m1
ue e
t des
Micro
passant en P et m2 < m1 .
d) En P est placée une fente symétrique de largeur totale D . Estimer la plus grande
valeur de D qui permet de ne sélectionner que les ions Au + .
e Mé
caniq
4XHVWLRQVRXYHUWHV
e Na
Écol
tiona
le Su
périe
ure d
91. Randonnée en montagne
Un sage entreprend de gravir une montagne. Pour cela, il part le matin à 9 h et arrive
au sommet à 12 h. Il se repose une nuit dans le refuge et repart le lendemain à 9 h.
Empruntant le même chemin mais en sens inverse, il arrive en bas à 11 h
(l’ascension et la descente se font chacune à vitesse constante).
Existe-t-il un endroit sur le chemin où il est passé à la même heure les deux jours ?
Si oui, le déterminer en précisant l’heure.
&KDSLWUH
.65.2
07:1
6929
5440
6
92. Hauteur atteinte par un bouchon de champagne
2320
:160
.179
Voici les 4 premières images pour une caméra enregistrant 100 images par seconde
et montrant l’éjection du bouchon de 10 g d’une bouteille de champagne de 75 cL
à une température de 9 °C .
Estimer la hauteur atteinte par le bouchon de champagne.
0753
582:
8891
93. Densimètre
Un densimètre permet de mesurer la densité des liquides. Celui représenté
ci-contre est formé d’une ampoule de verre scellée, d’une longueur de
28,0 cm, de section 2,00 cm 2 , lestée à sa base par une masse. La masse
totale du densimètre est 50,0 g.
Où doit-on placer la graduation 1,00 par rapport à l’extrémité supérieure ?
iques
:211
94. Quatre mouches aux sommets d’un carré (*)
Quatre mouches sont aux sommets d’un carré A1 A2 A3 A4 tel que OAi = a . La
mouche M i se dirige constamment vers la mouche M i +1 (on pose M 5 ≡ M 1 ) avec
A1
A2
A4
A3
ue e
t des
A2
Micro
techn
une vitesse de norme constante V .
Établir en coordonnées polaires r et θ l’équation de la trajectoire d’une mouche.
Au bout de quelle durée τ les mouches vont-elles se rencontrer ? Quelle est la
distance L parcourue par chaque mouche ?
a
r θ
A1
A4
e Mé
caniq
O
A3
M1
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
95. Une vache à la patinoire
Une vache de 500 kg à laquelle on a chaussé des patins à glace est immobile sur
une patinoire et soumise à aucune force horizontale (pas de frottement des patins sur
la glace). Prise de panique, elle expulse une bouse de 5 kg à une vitesse de
10 cm.s −1 . Que se passe-t-il alors pour la vache ?
6929
5448
1
96. Le saut à l’élastique
Un homme de masse m = 80 kg saute à l’élastique d’un pont d’une hauteur
H = 112 m . Il est retenu par un élastique de constante de raideur k = 1, 0 103 N.m −1
et de longueur à vide A 0 = 80 m . Il quitte le pont avec une vitesse quasi nulle et les
frottements sont négligés. Le saut est-il sûr ?
Un fil soutient un ensemble de deux masses identiques reliées
par un ressort de raideur k et de masse négligeable. À l’instant
initial où le système est immobile, on coupe le fil. Quelle est, à
t = 0 + , l’accélération de chaque masse ? Leur mouvement
ultérieur ?
m
.179
.65.2
0
07:1
97. Chute libre avec une accélération supérieure à g
m
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
2320
:160
x
G
g
&KDSLWUH
6929
5448
1
5pSRQVHVDX[TXHVWLRQV
/HFRXUVG·DERUG
.65.2
07:1
&LQpPDWLTXHGXSRLQW
0753
582:
8891
2320
:160
.179
1. Un référentiel est un objet (solide) par rapport auquel on étudie le mouvement, par
exemple d’un point M. L’étude des déplacements de M nécessite des mesures de
durées, le référentiel comprend donc aussi une horloge. La nature du mouvement de
M (trajectoire, vitesse…) dépend du référentiel choisi.
Le solide de référence pouvant être quelconque, on le
représente symboliquement par un point et trois axes
(R)
(appelé aussi repère).
M
En théorie, nommer ces axes n’a aucune utilité, les
prendre perpendiculaires n’est pas indispensable.
La représentation peut faire penser à un simple repère,
O
mais le référentiel nécessite aussi une horloge, le terme
repère n’est pas approprié.
périe
ure d
e Mé
Soit O un point fixe du référentiel (R) :
JJJJJG JJJJG JJJJG JJJJG
JJJJG
MM ′ = OM ′ − OM = OM (t + Δt ) − OM (t )
JJJJG
JJJJG
JJJJG
dOM
G
OM (t + Δt ) − OM (t )
G
v (M ) (R) =
v ( M ) ( R ) = lim
Δt → 0
dt
Δt
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
JJJJG
G
dv
d 2 OM
G
=
Par ailleurs… a ( M ) ( R ) =
dt
dt 2
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
Micro
techn
iques
:211
Entre deux positions M (à la date t) et M ′ (à la date
M′
JJJJJG
MM ′
t + Δt ) le vecteur vitesse moyen est
. La trajectoire
Δt
M
(ou courbe), ensemble des positions de M au cours du
JJJJJG
temps, est quelconque. MM ′ est porté par la corde MM ′
et correspond bien à la notion de direction moyenne entre
M et M ′ .
La vitesse en M est définie comme la limite quand M ′ → M (soit Δt → 0 ) du
JJJJJG
MM ′
G
vecteur vitesse moyen. v = lim
. Il résulte de cette définition que la direction
Δt → 0 Δt
du vecteur vitesse est la position limite de la corde quand M ′ → M , qui par
définition est la tangente à la courbe en M.
G
Le vecteur accélération a ( M ) ( R ) caractérise les variations du vecteur vitesse,
comme le vecteur vitesse caractérise les variations du vecteur position.
M2
M3
M6
.179
M1
M 5′
M5
M4
.65.2
M ′2
07:1
6929
5448
1
2. Le référentiel d’étude est le banc (référentiel terrestre), O est un point fixe du
référentiel. La trajectoire est imposée : le mouvement est rectiligne. Le vecteur
vitesse en M ′2 est approximé par le vecteur vitesse moyen entre M 2 et M 3 (séparés
JJJJJJJG
G
de 80 ms), lui-même proportionnel au vecteur M 2 M 3 . On constate que v est porté
G
par la droite support du mouvement et que v augmente au cours du temps.
M3
M 5′
M6
:211
M2
M5
iques
M1
M ′4
M4
0753
M ′2
M 1′
582:
8891
2320
:160
G
G
G
Δv v ( M ′2 ) − v ( M 1′ )
Pour l’accélération en M 2 , par exemple, on utilise
=
. Sur les
Δt
Δt
G
G
schémas on a porté v ( M ′2 ) et −v ( M 1′ ) , puis réalisé la somme (flèche épaisse), ce
G
G
qui donne Δv proportionnel à a . Le vecteur accélération est porté par la droite
G
support du mouvement, a semble constante.
M5
Micro
techn
M2
ue e
t des
G
G
Le vecteur accélération traduit les variations de v . La direction de v ne changeant
G
pas, l’accélération déterminée graphiquement traduit une variation de la norme de v
constatée au début de la question.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
3. Le référentiel d’étude est la table (référentiel terrestre), O est un point fixe du
référentiel. La trajectoire est imposée, le fil tendu impose une distance constante de
M à O : la trajectoire est un cercle de centre O. Les constructions utilisent les mêmes
approximations et méthodes qu’à la question précédente.
JJJJJJJG
JJJJJJJG
En décalant, par exemple M 2 M 3 en M ′2 , la vitesse (proportionnelle à M 2 M 3 )
apparaît bien tangente à la trajectoire. Sa norme est constante.
Le vecteur accélération est dirigé vers O, donc porté par un rayon, sa direction est
G
perpendiculaire à la tangente en M. La norme de v étant constante, l’accélération
G
non nulle traduit donc une variation de la direction de v (évidente pour un
mouvement circulaire).
&KDSLWUH
M6
M 5′
M5
M ′4
.179
M3
.65.2
07:1
6929
5448
1
M4
:160
M ′2
M2
2320
O
8891
M 1′
:211
0753
582:
M1
Micro
techn
iques
4. La base cartésienne (base vectorielle de projection) est une base très particulière,
elle est associée aux axes du référentiel. Les vecteurs (unitaires) de la base sont
portés par ces axes, ils sont donc fixes dans le référentiel (R). Les composantes du
JJJJG
vecteur position OM , dans cette base, sont les coordonnées cartésiennes du point
M. Attention il s’agit d’un cas particulier, ce n’est pas une définition générale des
composantes du vecteur position.
JJJJG
G
G
G
OM = xu x + yu y + zuz
e Mé
caniq
Vitesse dans ( R) , avec les dérivées des vecteurs de la base nulles dans ( R ) :
JJJJG
§ dOM ·
G
G
G
G
x + yu
y + zu
z
v ( M )( R ) = ¨
¸ = xu
© dt ¹( R )
ure d
Accélération dans ( R) :
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
JJJJG
G
§ d 2 OM ·
§ d v ( M )( R ) ·
G
G
G
G
a ( M )( R ) = ¨
xu x + yu y + zuz
¸ = ¨ dt 2 ¸ = dt
©
¹( R ) ©
¹( R )
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
G G
G
où u x , u y et u z sont les vecteurs unitaires de la base cartésienne.
⊕
axe polaire
:160
.179
.65.2
07:1
r = x2 + y2 .
Si r variait seule, le point M se
seul r varie
déplacerait suivant la droite OM, le
G
G
vecteur u r est dans la direction de ce R
uθ
G
( )
ur
déplacement, unitaire et dans le sens des
•M
r croissants.
r
Si θ variait seule, le point M se
déplacerait sur le cercle de centre O et de
θ
G
rayon r, le vecteur uθ est dans la
O
direction de ce déplacement (tangent à
ce cercle), unitaire et dans le sens des θ croissants.
6929
5448
1
5. Pour un mouvement dans un plan, si un point du plan joue un rôle particulier pour le
système étudié, la distance à ce point est un paramètre important de l’étude. On
construit un système de coordonnées dont la première coordonnée est cette distance.
En coordonnées cartésiennes, cette distance s’exprime de façon compliquée :
8891
2320
Le vecteur position s’exprime très simplement dans la base locale polaire (une seule
composante :
JJJJG
G
OM = r u r
G
G
G
v ( M )( R ) = r ur + r θ uθ
iques
JJJJG
G
G
dOM = dr u r + rdθ uθ
:211
0753
582:
Pour exprimer le vecteur vitesse, on cherche les composantes du vecteur
JJJJG
déplacement dOM , en considérant successivement les déplacements dus à une
G
variation dr de r, puis dθ de θ . Si r varie seule le déplacement (sur OM) est dr u r ,
G
si θ varie seule le déplacement (sur cercle (O, r)) est r dθ uθ :
caniq
ue e
t des
Micro
techn
Il s’agit bien de la vitesse par rapport au référentiel (R), projetée sur une base locale
G
G
mobile, u r et uθ dépendent de θ qui dépend de t.
G
Pour exprimer le vecteur accélération, on dérive v dans (R), pour les dérivations de
G
G
u r et uθ , voir le chapitre 0.
G
G
du
du
G
G
G
G
a = r u r + r r + rθuθ + rθ uθ + r θ θ
dt
dt
G
G
d
u
d
u
G
G
§
·
§
·
avec : ¨ r ¸ = θ uθ et ¨ θ ¸ = − θ ur
dt
dt
©
¹( R )
©
¹( R )
ure d
Cette relation, très utile, doit être mémorisée.
e Mé
G
G
G
a ( M ) ( R ) = (
r − rθ 2 ) u r + (2 rθ + rθ) uθ
e Na
Écol
tiona
le Su
périe
6. Si un axe de l’espace joue un rôle particulier pour le système étudié (par exemple
rotation autour d’un axe), la distance à cet axe est un paramètre important de l’étude.
On construit un système de coordonnées dont la première coordonnée est cette
distance. Si on note Oz l’axe privilégié, on retrouve avec le plan perpendiculaire,
l’équivalent du plan polaire de la question précédente. Ce qui montre l’intérêt de
&KDSLWUH
garder la notation r pour la distance à l’axe,
r = Om = pM . Les vecteurs de la base
locale, associée au système de coordonnées,
sont définis de la même façon. On ajoute le
G
vecteur u z , unitaire et dans la direction du
déplacement si seule z varie.
Les composantes des vecteurs sur
G G
G
u r , uθ et u z sont qualifiées respectivement
de radiale, orthoradiale et axiale.
JJJJG JJJG JJJJG
G
G
OM = Om + mM = r u r + z u z
cercle (p, r )
z
G
uz
p
G
uθ
O
r
.65.2
θ
G
ur
07:1
6929
5448
1
M
2320
:160
.179
m
Malgré les apparences le vecteur position axe polaire
G
dépend bien de θ , car u r en dépend. En
G
revanche il n’a aucune composante orthoradiale (sur uθ ).
De même qu’à la question précédente, on obtient le vecteur déplacement :
JJJJG
G
G
G
dOM = dr u r + rdθ uθ + dz u z , on en déduit :
8891
G
G
G
G
v ( M )( R ) = r ur + r θ uθ + z u z
:211
0753
582:
G
G
Pour le vecteur accélération, on ajoute seulement le terme z u z , puisque u z est fixe
dans (R) :
G
G
G
G
a ( M ) ( R ) = (
r − rθ 2 ) u r + (2 rθ + rθ) uθ + z uz
ϕ
ure d
e Mé
déplacement si seule ϕ varie (tangent au
x
cercle (p, r sin θ ).
JJJJG
G
OM = r u r
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
G
Malgré les apparences le vecteur position dépend bien de θ et de ϕ , car u r en
dépend. C’est dans la base locale sphérique que son expression est la plus simple.
De même qu’à la question précédente, on obtient le vecteur déplacement :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
Micro
techn
iques
7. Si un point de l’espace joue un rôle particulier pour le système étudié (par exemple
centre attracteur gravitationnel), la distance
cercle (p, r sin θ )
z
à ce point est un paramètre important de
l’étude. On construit un système de
G
coordonnées dont la première coordonnée
p
ur
G
est cette distance. L’angle θ est la
uϕ
colatitude et ϕ la longitude. Si on note O le
M
point privilégié, on retrouve dans le plan
G
uθ
(OM, réf. Oz), l’équivalent du plan polaire
θ
de la question 5.. Les vecteurs de la base
r
cercle(O, r )
locale, associée au système de coordonnées,
sont définis de la même façon. On ajoute le
O
G
vecteur u ϕ , unitaire et dans la direction du
JJJJG
G
G
G
d OM = dr u r + rdθ uθ + r sin θ d ϕ u ϕz , on en déduit :
G
G
G
G
v ( M )( R ) = r ur + r θ uθ + r sin θ ϕ uϕ
6929
5448
1
8. Un mouvement est uniforme si la norme du vecteur vitesse est constante :
G
v = cste
07:1
Cette définition s’applique quelle que soit la trajectoire.
Le mouvement est rectiligne si la trajectoire est une droite.
.179
.65.2
G JJJG
Un mouvement rectiligne et uniforme si et seulement si v = cste
G G
Ce qui s’écrit aussi : a = 0 .
:160
G
G
9. Écrivons a = a 0 u y et projetons sur une base cartésienne :
8891
2320
x=0
­ x = x 0
­ °
°
y = a 0 ® y = a 0t + y 0
® ° ° z = z
¯z = 0
0
¯
:211
0753
582:
Pour que le mouvement soit rectiligne, il faudrait : x 0 = 0 et z 0 = 0 , ce qui n’est
pas vérifié si la vitesse initiale a une composante dans une direction orthogonale à
G
celle de a .
Avec les conditions initiales ( x 0 ≠ 0 , y 0 = 0 , z 0 = 0 ) et x 0 = y 0 = z 0 = 0 :
techn
iques
­ x = x 0t
°
a0
1
°
2
x2
® y = a 0t y =
2
2
2
x
0
°
°̄ z = 0
Micro
la trajectoire est parabolique (voir aussi la question 16.).
e Mé
caniq
ue e
t des
10. La trajectoire est un cercle. Le mouvement est plan, on choisit le plan z = 0 . On
prend un système de coordonnées polaires avec le pôle O au centre du cercle, ce qui
permet de traduire simplement que la distance du point M au centre du cercle est
constante avec r = cste = R . Il vient r = 0 et z = 0 , on note θ = ω la vitesse
angulaire (pas nécessairement constante).
G
G
G
* la vitesse est orthoradiale : v ( M )( R ) = R θ uθ = R ω uθ si le pôle O est le centre
périe
ure d
du cercle et v = R ω . On remarque que dans ce cas la vitesse tangente à la
G
G
trajectoire est portée par uθ , donc que uθ est ici le vecteur tangent. Ceci est dû au
choix du pôle au centre du cercle, ce n’est pas un résultat général (voir
question 37.)
le Su
tiona
e Na
G
G
G
v 2 G dv G
a ( M )( R ) = − R θ 2 ur + R θ uθ = − ur + uθ
R
dt
Écol
* l’accélération est :
&KDSLWUH
6929
5448
1
11. Pour un mouvement circulaire uniforme, dont le centre est le pôle des coordonnées
polaires :
G
G
G
2G
v ( M )( R ) = R ω uθ
avec ω = cste , et a ( M )( R ) = − R ω ur
L’accélération du mouvement circulaire uniforme n’est pas nulle, le vecteur accélération, dirigé dans ce cas vers le centre du cercle, décrit les variations de la direction
du vecteur vitesse (c’est le cas de l’étude question 3.).
07:1
G
G
G
G
Δv v 2 − v1
G dv
≈
=
12. a =
Δt
Δt
dt
G
Les variations de v
.65.2
G
v2
2320
:160
G G
Δ v = a Δt
.179
G
sont décrites par la
v1
G
G
G
G
composante tangentielle aT de a . En effet si a
G
aT
v1
G
G G
G
est colinéaire à v1 , Δv = a Δt est colinéaire à v1 M 1
G
G
et donc v 2 est colinéaire à v1 , seule la norme
M2
change. C’est le cas traité à la question 2..
G G
Δ v = a Δt
:211
0753
582:
8891
G
G
Les variations de la direction de v sont décrites par la
v1
composante orthogonale à la tangente (dite normale) M 1
G
G
G
G
G
a N de a . En effet si a est orthogonal à v1 ,
a N vG1
G
G
G G
G
Δv = a Δt est orthogonal à v1 et donc v 2 = v1
G
G
(car Δv très petit), seule la direction change. C’est le
M 2 v2
cas traité à la question 3..
techn
iques
G G
G
G
G
En considérant a = aT + a N , le changement de direction de v créé par a N entraîne
une courbure de la trajectoire dans le même sens :
G
a est toujours dans la concavité de la trajectoire
G
a
correct
G
a
G
v
M
impossible
périe
ure d
e Mé
Il apparaît ainsi une base naturelle, locale, associée à la trajectoire et non à un
G
système de coordonnées. Elle est définie par le vecteur tangent T (unitaire, tangent
G
à la courbe et dont le sens oriente la trajectoire) et le vecteur normal N (unitaire,
dirige la normale principale et de sens dans la concavité).
G
Les composantes de a , dans cette base (appelée base de Frenet) s’obtiennent en
généralisant l’expression vue à la question 10. :
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
G dv G v 2 G
a =
T +
N
dt
RC
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
correct
M
ue e
t des
G
a
G
v
caniq
G
v
M
Micro
Ce que l’on peut illustrer par :
Ce qui revient à considérer (hors point singulier) la courbe, au voisinage de M
comme un petit arc de cercle de rayon RC . RC est appelé rayon de courbure en M.
6929
5448
1
Sur une courbe qui n’est pas un cercle, la valeur de RC peut changer en tout point.
/RLVGH1HZWRQHWPRGpOLVDWLRQGHVIRUFHV
8891
2320
:160
.179
.65.2
07:1
13. « Il existe des référentiels, dits galiléens, dans lesquels le mouvement de tout point
matériel isolé est rectiligne et uniforme. » Ce qui signifie que l’état naturel d’un
point soumis à aucune interaction (ou à des interactions qui se compensent) est un
mouvement rectiligne uniforme et non l’immobilité qui n’est qu’une possibilité.
L’expérience de la vie courante incite à croire (de façon erronée) que le mouvement
nécessite une action sur le système, alors que cette action ne fait en général que
compenser une autre force, par exemple des frottements.
Il a fallu attendre Galilée pour trouver ce principe et Newton pour l’énoncer.
Le principe d’inertie contient aussi la définition d’une classe de référentiels dits
galiléens. Les référentiels galiléens sont en translation rectiligne uniforme les uns
par rapport aux autres. Voir la définition de la translation rectiligne d’un solide au
chapitre 7.
0753
582:
G
14. Pour un point matériel de masse m et de vitesse v à la date t dans un référentiel (R) :
G
G
p = mv
Pour un système de points M i de masse mi :
JJJJJG
JJJJJG
d mi OM i
dOM i
G
G
G
p = ¦ p i = ¦ mi v i = ¦ mi
=¦
dt
dt
i
i
i
i
pour la suite du calcul il faut bien comprendre qu’écrire
JJJJJG ·
§
JJJJJG
d ¨ ¦ mi OM i ¸
d mi OM i
¹
= © i
¦i
dt
dt
nécessite une somme qui ne dépende pas du temps, il faut donc que le système soit
constitué en permanence des mêmes points : il est dit fermé.
)
)
ue e
t des
Micro
(
techn
iques
:211
(
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
Par définition du centre d’inertie G (ou barycentre des masses) :
JJJJJG ·
JJJG
§
¨ ¦ mi OM i ¸ = M OG
© i
¹
où M est la masse totale du système.
Il vient alors pour la quantité de mouvement (ou résultante cinétique) du système
fermé, de centre d’inertie G :
JJJG
JJJG
d OG
G d M OG
G
p=
=M
= M vG
dt
dt
Le système étant fermé, sa masse M est évidemment constante.
G
G
Pour un système fermé : p = M v G
&KDSLWUH
6929
5448
1
15. Relation fondamentale de la dynamique (Newton 1687), ou loi de la quantité de
mouvement, pour un point matériel M de masse m dans un référentiel galiléen :
G dpG
G
¦ f = dt = m a ( M )( R )
le premier membre représente la somme des forces s’exerçant sur le point matériel.
.65.2
07:1
Pour un système fermé de points :
G
G
G
d pi
d §
G · d ( M vG )
G
¦i f i = ¦i dt = dt ¨© ¦i pi ¹¸ = dt = M aG
G
G
Théorème de la résultante cinétique, pour un système fermé : ¦ f = M a (G ) ( R )
Micro
techn
iques
:211
0753
582:
8891
2320
:160
.179
16. Dynamique du point libre
a) La RFD appliquée au projectile dans le référentiel terrestre (supposé galiléen)
G
G
donne avec comme seule force le poids : a ( P )( R ) = g .
Il s’agit d’un mouvement à accélération constante.
y = 0 y = cste = 0 (d’après les conditions initiales)
En projection sur Oy : G
y = cste = 0 , le mouvement est plan dans le plan vertical contenant v 0 .
En projection sur Ox (axe horizontal tel que v0 x > 0 ) et sur Oz verticale
ascendante :
dv
sur Ox : x = 0 vx = v0 x = v0 cos α puis x(t ) = (v0 cos α )t car x (0) = 0 ;
dt
en l’absence de force suivant Ox , la projection du mouvement sur Ox
est uniforme.
dv
sur Oz : z = − g vz (t ) = − gt + v0 z = v0 sin α − gt ,
dt
1
puis z (t ) = (v0 sin α )t − gt 2 car z (0) = 0 ; c’est un mouvement
2
classique de chute libre avec vitesse initiale.
équation d’une parabole d’axe parallèle à Oz .
e Mé
b) L’intersection de la trajectoire avec le sol défini par z = 0 donne deux
possibilités : xs = 0 à éliminer car il correspond au point de lancement et
v02 sin 2α
dont la valeur dépend de l’angle de tir α ; la portée xs est
g
v2
maximale pour sin 2α = 1 soit α = 45° et vaut xsmax = 0 .
g
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
xs =
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
g
x2
2v cos2 α
2
0
caniq
z = (tan α ) x −
ue e
t des
L’équation de la trajectoire s’obtient en éliminant le temps entre les équations
horaires x(t ) et z (t ) soit :
c) La flèche est l’altitude maximale H atteinte par le projectile P . Il est inutile
pour trouver le maximum de la parabole de procéder à une dérivation, la fonction
étant symétrique par rapport à ce maximum, il se situe à la moitié de la portée,
soit :
xs v02 sin α cos α
=
d’où H = z ( xF ) et après calcul
2
g
v02 sin 2 α
2g
6929
5448
1
xF =
H = z ( xF ) =
:160
.179
.65.2
07:1
17. La force de frottement fluide (appelée aussi traînée) qu’exerce un fluide sur les
JG
G
corps en mouvement est toujours opposée au vecteur vitesse : F = −α v où α > 0 . Il
s’agit bien sûr de la vitesse relative du corps par rapport au fluide, et pas de la
vitesse dans n’importe quel référentiel. La force est la même que le corps se déplace
dans le fluide ou que le fluide s’écoule le long du corps : ce qui permet l’utilisation
de soufflerie pour les mesures de cette force de frottement.
Pour α , on utilise justement l’étude expérimentale, l’expression de la force de
frottement fluide est une modélisation empirique :
8891
2320
ŹPour des vitesses faibles : α est sensiblement une constante, notée λ (c’est-àdire F proportionnel à v ) :
G
G
F = −λ v
:211
0753
582:
ŹPour des vitesses importantes et sur une plage limitée de vitesse, α est à peu près
proportionnel à v (c’est-à-dire F proportionnel à v 2 ) :
G
G
G G
F = −k v v
F = k v2
soit
iques
Ce modèle conduit à des équations différentielles non linéaires !
techn
Pour des raisons de simplicité des calculs le premier modèle est le plus souvent
utilisé.
caniq
ue e
t des
Micro
18. La force exercée par le support sur le point matériel est une force de réaction. Elle
n’a pas d’existence propre, elle n’apparaît que si d’autres forces s’exercent. Sa
valeur dépend des autres forces appliquées et du mouvement !
G G
G
G
G
La relation fondamentale s’écrit : F + R = m a où a et R sont inconnues, ce qui
pose problème pour la résolution. Une connaissance partielle de la force de réaction
peut permettre de trouver des projections qui éliminent la force de réaction et rend
possible l’intégration.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
Cas d’un point mobile sur une courbe (par exemple anneau coulissant sur un fil de
fer), le point ne peut pas quitter la courbe, la liaison est bilatérale. On décompose la
force de réaction exercée par le support sur le « point matériel » en une composante
G
tangente à la courbe, notée Rt (force de frottement solide), et une composante
G
normale Rn dans le plan perpendiculaire à la tangente à la courbe. Dans ce cas, la
G
G
direction de Rt est unique, alors que la direction de Rn n’est pas connue a priori.
&KDSLWUH
.65.2
07:1
6929
5448
1
Cas d’un point mobile sur une surface, le point peut quitter la surface, la liaison est
G
unilatérale. Même décomposition, mais cette fois c’est la direction de Rn qui est
unique et connue.
G
G
Si la liaison est sans frottement : Rt = 0 . On peut alors projeter sur des directions
G
où R n’a pas de composante.
G
Attention à ne pas confondre la normale au support n et la normale à la trajectoire
G
N . Par exemple si un point mobile sur une surface plane a un mouvement circulaire
uniforme, la normale à la trajectoire (dirigée vers le centre du cercle) et la normale à
la surface sont orthogonales.
19. Pour un ressort, la force de rappel élastique exercée
G
G
sur une extrémité est f = − k ( l − l 0 ) u et où (l − l 0 )
.179
équilibre
A
G
m u et
•
x
x
l eq = l 0
techn
À l’équilibre : x=0
iques
:211
0753
582:
8891
2320
:160
est l’allongement algébrique ( l 0 longueur à vide) et
G
u et le vecteur unitaire dirigé dans le sens des
l eq
x
étirements pour l’extrémité considérée. Si on oriente
l’axe Ox dirigeant le ressort dans le sens des
G
G
l
étirements pour cette extrémité : u et = u x .
m
La relation fondamentale de la dynamique appliquée à A
•
la masse m dans le référentiel terrestre ( R) supposé
galiléen est, en l’absence de frottement solide :
date t quelconque
G
G
G G
ma ( M )( R ) = −k (l − l0 ) u x + mg + Rn
G
La réaction Rn est orthogonale à Ox , d’où en projection sur Ox :
m x = − k (l − l0 )
k
, il vient :
m
x + ω02 x = 0
ue e
t des
en posant ω02 =
Micro
On choisit l’origine de l’axe des x à la position d’équilibre : x = l − l eq = l − l 0
2π
e Mé
caniq
x(t ) = a cos(ω0t + ϕ ) où l’amplitude a et la phase à l’origine ϕ dépendent des
conditions initiales.
m
, elle est indépendante de l’amplitude a, propriété
ω0
k
importante et non intuitive des oscillateurs harmoniques. On parle d’isochronisme
des oscillations.
= 2π
périe
ure d
La période est T =
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
Traçons le portrait de phase x ( x ) . On obtient pour une trajectoire de phase :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
C’est l’équation d’un oscillateur harmonique de pulsation ω0 , la solution est
­° x(t ) = a cos ( ω 0 t + ϕ )
®
°̄ x ( t ) = −aω 0 sin ( ω 0 t + ϕ )
et en changeant l’origine des dates :
­° x(t ) = a cos ( ω 0 t )
®
°̄ x ( t ) = −aω 0 sin ( ω 0 t )
x
x
équation d’une ellipse dans le diagramme ( x, x ) .
6929
5448
1
On peut obtenir des cercles, plus simple à identifier
expérimentalement, en traçant x ω 0 en fonction de x :
07:1
a1 a 2
x
.65.2
.179
le
caractère
x
:160
Remarques :
a) Les courbes fermées indiquent
périodique du mouvement.
x ω 0
x
0753
582:
8891
2320
b) On trouve le sens de parcours d’une trajectoire de
phase en considérant l’ordonnée d’un point de la
trajectoire de phase : par exemple si en ce point
x > 0 alors x / à partir de ce point.
O
iques
:211
20. Le système est la bille ; elle est soumise à deux forces : son
JG
poids et la tension T exercée par le fil colinéaire au fil, mais
dont la valeur n’est pas connue (elle dépend de θ (t ) ).
Il est donc judicieux d’écrire la RFD en la projetant sur la base
G
polaire et en particulier sur la direction orthoradiale uθ pour
JG
éliminer T ; ceci suppose de connaître l’accélération en
polaires et en particulier aθ = 2rθ + rθ = lθ car r = l = cste
(mouvement circulaire non uniforme) :
soit
g
l
θ = − sin θ
G
uθ
•
z
G
mg
G
ur
(1)
ue e
t des
mlθ = − mg sin θ
Micro
techn
θ
G
T
e Mé
caniq
g
Avec θ petit et donc sin θ ≈ θ , (1) s’écrit θ ≈ − θ = −ω02θ
l
On obtient un oscillateur harmonique linéarisé, conduisant à une solution
harmonique θ (t ) = A cos(ω0t + ϕ ) ; les conditions initiales de position et de vitesse
θ (t = 0) = θ et θ(t = 0) = 0 conduisent à :
0
ure d
θ (t ) = θ0 cos ω0t
périe
La pulsation du mouvement ω0 = g / l est indépendante de la masse du pendule et
e Na
Écol
tiona
le Su
de l’amplitude θ0 des oscillations (cf. oscillateur harmonique).
&KDSLWUH
l
g
T0 = 2π
La période du pendule est
07:1
6929
5448
1
Il y a isochronisme des petites oscillations, puisqu’il faut θ petit pour le modèle
oscillateur harmonique.
Pour l = 1 m , horloge comtoise (de parquet) T est de l’ordre de 2 s, elles « battent »
la seconde (demi-oscillation). Pour une horloge de cheminée, l de l’ordre de
0, 25 m ( le quart de la longueur précédente), la période sera deux fois plus petite :
1 seconde.
.65.2
3RXVVpHG·$UFKLPqGH
.179
21. Que l’on soit dans un liquide (un sous-marin) ou dans un
G
gaz (un aérostat), la pression augmente dans le sens de g .
Le dessin ci-contre pour un corps totalement immergé dans
un fluide, où les flèches représentent les forces de pression,
montre que la force globale sur la partie inférieure du corps
est supérieure à la force globale sur la partie supérieure,
indiquant que le corps subit de la part du fluide une
poussée verticale ascendante.
582:
8891
2320
:160
G
g
A
S
cas 1
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Cas 2 : On remplace par la pensée tout le volume
occupé par le corps A dans le cas 1 par la quantité
nécessaire de fluide. Ce fluide (fictif) occupe le volume
V et présente une surface de contact ( S ) avec le fluide
environnant ayant la même forme que le corps A dans le
cas 1. L’action du fluide sur A dans le cas 1 est la même
(S )
que l’action du fluide extérieur à ( S ) sur le fluide
cas 2
intérieur à ( S ) dans le cas 2, avec l’hypothèse d’un
champ de pression inchangé dans le fluide extérieur car ne dépendant a priori que
de la forme de ( S ) et pas de sa texture.
Or l’équilibre, dans le référentiel terrestre galiléen, du fluide intérieur à ( S ) impose
JJG
que cette action Π soit opposée au poids du fluide intérieur à ( S ) .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
techn
iques
Cas 1 : Le corps A est totalement immergé dans un
fluide au repos ; il est en équilibre car un opérateur
extérieur le maintient dans cet état. On se propose de
JJG
déterminer la force Π qu’exerce le liquide sur lui, on
note V son volume et S sa surface, lorsqu’il est dans le
fluide et à l’équilibre.
:211
0753
22. Le cas le plus général concerne l’action d’un fluide quelconque sur un corps
quelconque totalement immergé.
Soient les deux situations :
6929
5448
1
Énoncé du théorème d’Archimède : « Tout corps plongé dans un fluide subit de la
part de ce fluide une force verticale ascendante égale à l’opposé du poids de fluide
déplacé ».
JJG
G
Π = −m * g
m * masse de fluide déplacé
2320
:160
.179
.65.2
07:1
Cette force s’applique au centre de masse du fluide déplacé (dans un champ de
pesanteur uniforme) qui est a priori différent du centre de masse du corps immergé.
Attention au sens de « déplacé », dans le théorème, qui signifie fluide à mettre à la
place du corps pour garder le même champ de pression et qui ne correspond à aucun
déplacement réel.
La poussée d’Archimède est la résultante des forces de pression, c’est la non
uniformité du champ de pression, dans le fluide, qui en est responsable.
La poussée d’Archimède ne résout pas tous les problèmes de calcul des forces de
pression, elle reporte le problème sur le calcul de m * , si le fluide est
incompressible et le corps indéformable : m* = ρ 0 V , ρ 0 masse volumique
uniforme du fluide et V volume du solide.
eQHUJLHPpFDQLTXH
δ W( R )
dt
GG
= f .v ( M )( R )
(en W)
iques
P( R ) =
:211
La puissance de la force est le travail par unité de temps :
0753
582:
8891
G
23. Le travail de la force f s’exerçant sur un mobile en M qui, pendant l’intervalle de
G G
temps dt se déplace de d r = v ( M )( R ) dt dans ( R ) , est :
G G
G G
δ W( R ) = f . d r soit δ W( R ) = f . v ( M )( R ) dt (en J)
ue e
t des
Micro
techn
G
Les cas de nullité de la puissance de la force f appliquée au point M sont :
G
G
Ź v ( M )( R ) = 0 ; un corps immobile ne peut pas recevoir de puissance
G G
Ź f ⊥ v ( M )( R ) ; par exemple, la puissance du poids d’un objet est nulle lorsque
celui-ci est déplacé horizontalement (on dit que le poids ne travaille pas).
G JJJJJJG
G
24. f est la même en tout point W M 1 → M 2 = f . M 1 M 2 en effet :
JJJJG
JJJJG
G
G M2
G JJJJJG JJJJJG
G JJJJJJG
W M 1 → M 2 = ³ q f . d OM = f .³
d OM = f . OM 2 − OM 1 = f . M 1 M 2
M 1M 2
M1
G JJJG
Ce résultat s’applique au poids dans la mesure où le modèle g = cste est valable.
Soit des déplacements horizontaux limités (ordre de 100 km !) et des variations
d’altitude limitées (inférieures à environ 30 km). Comme le poids est porté par
définition par la verticale du lieu et en orientant l’axe Oz vers le haut :
G
W A → B (mg ) = mg ( z A − z B ) avec z altitude
Remarquer que le signe du travail du poids est en général prévisible et sa cohérence
avec le déplacement doit être vérifiée.
(
)
caniq
)
(
)
e Na
Écol
tiona
le Su
périe
ure d
e Mé
(
&KDSLWUH
6929
5448
1
25. La variation d’énergie cinétique d’un point matériel entre deux instants dans le
référentiel ( R) est égale à la somme des travaux dans ( R) de toutes les forces
appliquées entre ces deux instants.
G
On multiplie scalairement par la vitesse v ( M )( R ) la relation fondamentale de la
G
G
dynamique m a ( M )( R ) = ¦ f :
G
GG
§ d v ( M )( R ) ·
G
mv ( M )( R ) . ¨
¸ = ¦ f .v ( M )( R )
dt
©
¹( R )
.65.2
07:1
d § 1 G2
· dEC ( R )
= ¦ P( R )
¨ mv ( M )( R ) ¸ =
dt © 2
dt
¹
)
:160
(
M1M 2
.179
ce qui représente le théorème de la puissance cinétique ; sommé entre t1 et t2 , il
vient :
JJJJG
G
EC 2( R ) − EC 1( R ) = ¦ ³ q f . d OM = ¦W1→2( R )
8891
2320
ΔEC = ¦W
ou plus couramment
:211
0753
582:
26. Une force s’appliquant sur un point matériel est appelée champ de force si elle ne
dépend en chaque point de l’espace que des coordonnées d’espace du point.
Un champ de force est conservatif s’il existe une fonction scalaire, notée E P , des
coordonnées seulement telle que δ W = − dE p .
C’est-à-dire que le travail élémentaire du champ de force est une différentielle (les
variables étant les coordonnées uniquement).
M 1M 2
δW = ³
M2
− dE P = E P ( M 1 ) − E P ( M 2 )
M1
techn
WM 1 → M 2 = ³
iques
La conséquence sur le travail de ces forces est la suivante :
Micro
Le travail est indépendant du chemin suivi.
ue e
t des
27. Parmi l’ensemble des forces qui s’appliquent sur M, il faut distinguer :
– les champs de forces conservatifs, travail élémentaire δ W1 = − dE p
– les forces dont le travail est nul, travail élémentaire δ W2 = 0
caniq
Le théorème de l’ E C donne : dE C = δ W1 + δ W2 + δ W3 = − dE P + 0 + δ Wautres
E = EC + E P
e Mé
Soit d ( E C + E P ) = δ Wautres ; on pose alors
avec E énergie mécanique
périe
ure d
Un système soumis à des champs de force conservatifs et à des forces de travail nul
est dit conservatif :
dE = d ( E C + E P ) = 0 soit E = cste
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
Si d’autres forces s’appliquent, on les qualifie de non conservatives, leur travail
élémentaire est noté δ Wnc :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
– les autres forces, travail élémentaire δ W3 = δ Wautres
dE = d ( E C + E P ) = δ Wnc soit
E ≠ cste
Δ( Ec + E p ) = ¦Wnc
De façon générale on a
6929
5448
1
En l’absence de forces non conservatives, soit ¦ Wnc = 0 , l’énergie mécanique
E = Ec + E p du système se conserve, soit au cours du mouvement :
ΔE = 0
.179
.65.2
07:1
Contrairement à la relation fondamentale de la dynamique (équation différentielle
du second ordre), l’équation de conservation de l’énergie ne fait intervenir que des
dérivées premières (vitesse dans l’énergie cinétique), d’où le nom d’intégrale
première du mouvement.
:160
G G
G
G
G
G
28. Pour le poids : δ W = mg . d r = (− mgu z ).(dxu x + dyu y + dzu z ) = − mgdz ; ceci s’écrit
2320
sous forme d’une différentielle δ W = − dE p avec
8891
E p = mgz + cste
582:
l’axe Oz étant orienté suivant la verticale ascendante et en fixant la constante
arbitrairement.
techn
iques
:211
0753
Pour un ressort, la force de rappel élastique exercée sur une extrémité est
G
G
f = − k ( l − l 0 ) u et où (l − l 0 ) est l’allongement algébrique ( l 0 longueur à vide) et
G
u ét le vecteur unitaire dirigé dans le sens des étirements pour l’extrémité
considérée. Si on oriente l’axe Ox dirigeant le ressort dans le sens des étirements
G JJJJG
G
G
G
G
pour cette extrémité : u ét = u x et δ W = f . dOM = − k (l − l0 )u x . dxu x ; or le
déplacement dx de M est dû à une variation dl de la longueur du ressort (l’autre
extrémité étant fixe), donc :
Ep =
1
2
k ( l − l0 )
2
ue e
t des
avec
Micro
δ W = −k (l − l0 ). dl = −k (l − l0 ). d (l − l0 ) soit une différentielle δ W = − dE p
de constante nulle en choisissant l’énergie potentielle élastique nulle lorsque
l’allongement (l − l 0 ) est nul.
e Mé
caniq
Rq : L’énergie potentielle élastique ne dépend que de l’allongement algébrique et en
aucun cas du choix de l’origine sur Ox . Son expression est inchangée si les
deux extrémités sont mobiles.
ure d
1
mx 2 + E P ( x) = cste ; la valeur
2
de la constante E est fixée par les conditions initiales. Les valeurs de x autorisées
2
correspondent à x 2 =
( E − E P ( x) ) ≥ 0 . On trace le graphe de la fonction
m
E P ( x) , sur lequel on porte la valeur E et on traduit E P ( x) ≤ E .
e Na
Écol
tiona
le Su
périe
29. Pour un système conservatif à un paramètre : E =
&KDSLWUH
a) Barrière d’énergie potentielle, E P ( x) = K x
.65.2
07:1
6929
5448
1
EP
E1
.179
EC
:160
EP
2320
xm
O
x
582:
8891
Seules valeurs de x autorisées : x ≥ x m ; le point s’éloigne à l’infini en
transformant son énergie potentielle en énergie cinétique. Si on veut s’approcher
plus près de O (diminuer x m ) il faut augmenter E.
techn
iques
:211
0753
EP
E0
x2
1
k ( x − x 0 ) 2 + cste (graphe ci-dessus).
2
e Mé
b) Puits d’énergie potentielle, E P ( x) =
caniq
x0
x1
x
ure d
Si E = E1 , les seules valeurs de x autorisées sont x ∈ [ x1 , x 2 ] : système lié
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
Si E = E 0 , la seule valeur de x autorisée est x = x 0 : système à l’équilibre
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
E1
eWXGHGHO·pTXLOLEUH
dynamique et pour ( R) galiléen que :
G
6929
5448
1
30. Un système ponctuel est à l’équilibre dans un référentiel donné lorsqu’il y est au
JJJJG JJJG
G G
repos : OM = cste et v = 0 , O étant un point fixe du référentiel. De son
G
G
accélération nulle, a ( M )( R ) = 0 , on déduit alors par la relation fondamentale de la
G
07:1
¦f =0
:160
.179
.65.2
la somme des forces s’appliquant sur lui est nulle.
Si, légèrement écarté de cette position et lâché avec une vitesse initiale nulle, il y
revient spontanément, alors la position d’équilibre est dite stable (une bille au fond
d’une cuvette). Si, légèrement écarté de cette position et lâché avec une vitesse
initiale nulle, il s’en éloigne davantage, alors la position d’équilibre est dite instable
(une bille au sommet d’une bosse).
582:
8891
2320
31. Considérons un système conservatif unidimensionnel d’axe Ox . La RFD appliquée
à ce système s’écrit en projection sur l’axe du mouvement :
dE p
m x = ¦ fx = −
(1)
dx
où E p est la somme des énergies potentielles de toutes les projections f x .
:211
0753
Rappel : Il peut y avoir des forces qui s’appliquent sur le système et qui ne sont pas
des champs de force (comme une réaction, une tension de fil,…) mais qui ne
travaillent pas, donc leur projection sur l’axe Ox du mouvement est nulle.
dx
( xe ) = 0
techn
dE p
m xe = ¦ f x ( xe ) = 0 soit
iques
Pour la (ou les) position(s) d’équilibre xe , (1) s’écrit :
(2)
Micro
L’énergie potentielle admet donc un extremum (maximum ou minimum) en x = xe .
e Mé
caniq
ue e
t des
32. Posons ε = x − xe , ce qui représente l’écart par rapport à la position d’équilibre. Un
dE p
développement limité à l’ordre 1 de
autour de x = xe + ε (ou, ce qui au signe
dx
près revient au même, de la résultante des forces) s’écrit :
dE p
dE p
dE p
d 2Ep
d 2Ep
x
( x) =
( xe + ε ) ≈
( xe ) + ε
(
)
=
ε
( xe ) d’après (2)
e
dx
dx
dx
dx 2
dx 2
(3)
e Na
Écol
tiona
le Su
périe
ure d
Alors la RFD (1) se réécrit :
§ 1 d 2Ep
·
d 2Ep
m x = m ε = − ε
x
(
)
ou
encore
ε
=
−
( xe ) ¸ ε
¨¨
e
2
2
¸
dx
© m dx
¹
&KDSLWUH
d 2Ep
6929
5448
1
( xe ) < 0 (il s’agit d’un maximum d’énergie potentielle), l’équation
dx 2
différentielle (3) est du type ε = +ω 2ε , de solutions exponentielles ; l’écart ε
diverge et l’équilibre est instable.
1er cas : si
d 2Ep
( xe ) > 0 (il s’agit d’un
Ep
dx 2
minimum d’énergie potentielle, on parle de
« cuvette »), l’équation différentielle (3) est du type
ε = − ω 2ε , de solutions sinusoïdales ; l’écart ε
oscille avec une amplitude finie et l’équilibre est
stable.
xe
x
La résultante des forces a été linéarisée au
voisinage de l’équilibre (comme pour un ressort) et
localement, la fonction énergie potentielle (en trait plein) est assimilable à une
parabole (en trait pointillé) d’où la dénomination « d’approximation harmonique ».
La pulsation des oscillations au voisinage de l’équilibre est :
2320
:160
.179
.65.2
07:1
2ème cas : si
8891
2
582:
1 d Ep
( xe )
ω=
m dx 2
0753
0RXYHPHQWVGHSDUWLFXOHVFKDUJpHV
+Q
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
33. Pour décrire l’interaction entre particules chargées, par exemple la force exercée par
un ensemble de charges (sources) sur une charge q (test), il faut distinguer deux
situations.
Dans le référentiel galiléen d’étude, les charges sources immobiles créent tout point
G
de l’espace un « champ électrostatique », noté E et tel que la charge test subit une
G
force q E (traduisant l’interaction entre les charges).
Dans ce même référentiel, les charges sources mobiles (courant électrique par
G
exemple) créent aussi un champ dit magnétique noté B (voir le chapitre 12). La
force supplémentaire subie par la charge test dépend alors de son propre mouvement
G G
G
dans ce référentiel : q v ∧ B où v est la vitesse de la charge test dans le référentiel
lié aux sources du champ magnétique (circuit électrique ou aimant).
Finalement la force s’exerçant sur une particule de charge q est la force de Lorentz :
G
G
G G
F = qE + qv ∧ B
G
G
E et B sont les champs électrique et magnétique au point où se trouve la particule
G
et v sa vitesse dans le référentiel lié aux sources du champ magnétique.
−Q
Un champ électrique uniforme peut être créé entre
deux plaques chargées (avec des charges respectives
G
+Q et −Q ), très proches l’une de l’autre U
E
d
(« condensateur ») et dans la partie centrale. Le
G
champ E est orthogonal aux plaques, dirigé vers la plaque de plus faible potentiel
(chargée -) et sa norme est liée à la différence de potentiel entre les plaques qui
G
maintient les charges du condensateur : U = V + − V − = E d .
6929
5448
1
Un champ magnétique uniforme peut être créé dans l’entrefer d’un aimant en U ou
dans la région centrale d’une bobine très longue et parcourue par un courant
électrique.
G
GG
G G G
34. P = q E + q v ∧ B .v = q E.v , la puissance de la force magnétique, orthogonale
)
07:1
(
:160
.179
.65.2
au déplacement, est nulle. Seule la force électrique travaille.
G
G
La force F = q E est un champ de force conservatif, elle dérive de l’énergie
potentielle : E p = qV + cste , où V est le potentiel électrique au point où se trouve la
charge. Son travail est :
2320
W M 1 → M 2 = E p1 − E P 2 = q (V1 − V 2 )
iques
:211
0753
582:
8891
Pour une particule chargée, en présence d’une force électromagnétique, l’interaction
gravitationnelle est toujours négligeable.
Par exemple dans un atome d’hydrogène, la force électrique exercée par le noyau
G me m p
e2
(proton) sur l’électron est en norme
, l’interaction gravitationnelle
2
r2
4πε 0 r
et le poids (si l’électron est dans le champ de pesanteur) me g .
On obtient les rapports :
e2
9.10 9 (1, 6.10 −19 ) 2
=
≈ 3.10 21
2
2
−
−
10
30
4πε 0 r me g ( 10 ) 0, 9.10 × 9, 8
9.10 9 ( 1, 6.10 −19 )
e2
=
≈ 2.10 39
4πε 0G m e m p
6, 67.10 −11 × 0, 9.10 −30 × 1, 7.10 −27
Micro
techn
2
e Mé
caniq
ue e
t des
35. La relation fondamentale de la dynamique appliquée à la charge dans le référentiel
du laboratoire (supposé galiléen), avec comme seule force la force électrique,
G
JG
dv
s’écrit : m
= qE
dt
G JJJG
­° a = cste
donc le mouvement est rectiligne uniformément varié.
a) ® G G
°̄ a et v 0 colinéaires
G
E
A
G
v0
le Su
périe
ure d
G
On augmente la norme de la vitesse si E est orienté C
convenablement, par exemple pour un électron ( q < 0 ),
G
il faut une force dirigée vers A, soit E de A vers C et
une d.d.p. V A − VC = U > 0 .
e Na
Écol
tiona
Le théorème de l’énergie cinétique entre C et A :
&KDSLWUH
1
1
mv A 2 − mv02 = q (V0 − VA ) = −e ( −U ) = eU > 0
2
2
vA =
2eU
m
2eU
m
6929
5448
1
Si v 0 est négligeable :
v A2 = v02 +
A.N. : pour un électron U = 100 V v ≈ 6.10 3 km.s −1
U = 10 4 V v ≈ 6.10 4 km.s −1 ≈
c
5
07:1
L’électron est facilement relativiste.
(
)
2320
:160
.179
.65.2
G
G
b) On prend E = E u y , il s’agit d’un mouvement à accélération constante traité à la
question 9. :
­ x(t ) = v 0 t
°
1 qE 2
G G
°
t Le mouvement est plan, dans le plan v 0 , E .
® y (t ) =
2 m
°
°̄ z = 0
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
caniq
36. Le poids étant négligeable devant la force de Lorentz, la relation fondamentale de la
dynamique appliquée à la particule s’écrit dans le repère galiléen ( R) :
G
G JG
§ dv ·
m¨
¸ = qv ∧ B (1)
© dt ¹( R )
JG
G
a) On projette la relation (1) sur u z colinéaire à B , la force magnétique étant
JG
z = 0 z = cste = z 0 = 0 z = cste .
orthogonale à B : m JG
Le mouvement est plan, dans le plan perpendiculaire à B et contenant O.
G
G
On projette la relation (1) sur T colinéaire à v ; la force magnétique étant
G
orthogonale à v :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
La trajectoire est une parabole d’axe
y
qE 2
Oy et d’équation y =
x
.
2mv02
θ
Lorsque x = L , l’angle θ est donné
JG
E
dy
qEL
=
(la tangente
par tan θ =
2
dx x = L mv0
G
O
x
v0 L / 2
L
coupe l’axe Ox en L / 2 ).
G
Si au-delà de x = L le champ E ne
s’applique plus, on ne peut donc plus en théorie « négliger » le poids. On peut
cependant considérer la trajectoire comme quasi rectiligne, en négligeant la
g
) devant celle
courbure de cette trajectoire dans le champ de pesanteur (en
2 v 02
qE
).
dans le champ électrique qui produit la déviation (en
2 mv 02
p
q B
07:1
avec p = cste = mv 0
:160
.179
R=
La trajectoire est un cercle de rayon
.65.2
G G G
v2 G
v2 G
G
G JG
b) Puisque aT = 0 , a = a N =
N et m
N = qv ∧ B
RC
RC
G
G
L’égalité des normes, avec v et B orthogonaux, conduit à :
mv 0
mv
v2
=
= cste
m
= q vB RC =
qB
qB
RC
6929
5448
1
G
dv
v = v0 = cste
=0
dt
La vitesse est constante en norme. On retrouve que la force magnétique
orthogonale à la vitesse, ne travaille pas, donc ne peut pas modifier l’énergie
cinétique.
2π
2π m
|q|B
ωc
=
8891
T=
v0 | q | B
=
R
m
indépendante de v 0
582:
d’où la période
ωc =
2320
Le mouvement est circulaire plan décrit à la pulsation (dite cyclotron) :
JG
B×
• C
:
•
G
q < 0 v0 x
iques
:211
0753
JG
La figure donne la trajectoire orientée et le champ B dans
G
G
le cas q < 0 avec v0 = v0 u x .
y
techn
$SSOLFDWLRQVGLUHFWHVGXFRXUV
Micro
&LQpPDWLTXHGXSRLQW
e Mé
caniq
ue e
t des
JJJJG
G
G
G
37. 1. a) u r dirige OM et uθ est directement orthogonal à u r .
G
G
G
G G
b) v ( M ) = r ur + rθ uθ = aω e−ω t ( − ur + uθ )
G
G
G
G
a ( M ) = (
r − rθ 2 ) ur + (2rθ + rθ) uθ = −2aω 2 e− ω t uθ
G
c) v = 2 a ω e − ω t , le mouvement n’est pas uniforme.
G
G
G
G
G
d) en A, θ = ω t = 0 v A = − aω u r + aω uθ et a A = −2aω 2 uθ
en D, θ = ω t = π 2
π
ure d
−
G
G
G
G
G
v D = e 2 ( − aω u r + aω uθ ) ≈ −0, 2aω u r + 0, 2aω uθ
π
e Na
Écol
tiona
le Su
périe
−
G
G
G
a D = −2e 2 aω 2 uθ ≈ −0, 4 aω 2 uθ
&KDSLWUH
G
vD
G
ur
G
aD
G
vA
B
6929
5448
1
G
uθ
G
ur
aω 2
aω
G
uθ
D
axe polaire
A
G
ur
.65.2
O
07:1
G
uθ
.179
G
aA
θ
θ (t ) = ln « 1 ¨ 1 −
2 a ª¬ −e − θ º¼ = v 0 t conduisant à
«¬
iques
0
©
2 v0 · º
t ¸»
2 a ¹ »¼
techn
a 2
durée totale du parcours (finie) pour
v0
Micro
On remarque que θ → ∞ pour t →
§
:211
ª
0753
582:
8891
2320
:160
Le vecteur vitesse est bien tangent à la trajectoire, il n’est pas colinéaire au
G
vecteur uθ . Le vecteur accélération est dirigé dans la concavité de la courbe.
G
G G
Le produit scalaire a . v < 0 donc le mouvement est retardé, v décroît
avec t.
G
G
G
G
G
2. v = v 0 et v = − aθe − θ u r + aθe − θ uθ soit
v = 2 aθe − θ avec a et θ
positifs.
dθ
L’équation à variables séparables v 0 = 2 a e − θ
s’intègre en :
dt
e Mé
caniq
ue e
t des
JJJJG
G
G
G
38. a) u r dirige OM et uθ est directement orthogonal à u r .
b) r = d cos(ω t ) et r = − d ω sin(ω t )
G
G
G
G
G
v ( M ) = r ur + rθ uθ = dω ( − sin(ω t ) ur + cos(ω t ) uθ )
G
G
G
G
G
a ( M ) = (
r − rθ 2 ) ur + (2rθ + rθ) uθ = −2d ω 2 ( cos(ω t ) ur + sin(ω t ) uθ )
G
G
G
G
c) en A, θ = ω t = 0 v A = d ω uθ et a A = −2d ω 2 u r
en B, θ = ω t = − π 4
2
G
G
G
G
d ω ( u r + uθ ) ≈ 0, 7 d ω u r + 0, 7 d ω uθ
2
G
G
G
G
G
a D = − 2 d ω 2 ( u r − uθ ) ≈ −1, 4 d ω 2 ( u r − uθ )
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
G
vB =
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
un nombre de tours infini. La longueur de la spirale est donc a 2 .
6929
5448
1
G
vA
G
aA
07:1
G
uθ
G
ur
.179
.65.2
O
2320
:160
G
aB
G
vB
582:
dω 2
0753
B G
ur
dω
8891
G
uθ
Micro
techn
iques
:211
Le vecteur vitesse est bien tangent à la trajectoire, il n’est pas colinéaire au
G
vecteur uθ . Le vecteur accélération est dirigé dans la concavité de la courbe.
G
d) v = d ω ( sin 2 ω t + cos 2 ω t ) = d ω , le mouvement est uniforme ce qui est
G
G
cohérent avec les constructions précédentes où a et v sont orthogonaux.
v2 G
G
G G
a = 2 d ω 2 . De plus v = cste , donc a = a N =
N et
RC
d
v2
(d ω ) 2
RC =
=
2
RC
RC
trajectoire est un cercle de rayon d 2 .
2d ω2 =
ue e
t des
comme on le voit sur le dessin, la
caniq
/RLVGH1HZWRQHWPRGpOLVDWLRQGHVIRUFHV
1 2
gt donnent
2
v 2 = 2 gz (ou directement par le théorème de l’énergie cinétique) ; et ultérieurement
v′2 = 2 g ( z + l ) = v 2 + 2 gl soit v′ = 6, 4 m.s −1 .
v′ − v
= 0,14 s , difficilement
g
Écol
e Na
tiona
le Su
mesurable sans dispositif approprié.
T = t′ − t =
périe
Par ailleurs v = gt , puis v′ = gt ′
ure d
e Mé
39. Les lois de la chute libre (avec vitesse initiale nulle), v = gt et z =
&KDSLWUH
6929
5448
1
40. L’énergie mécanique de l’oscillateur est :
1
1
1
E = E c + E p = m v 2 + = m x 2 + k x 2
2
2
2
dE
= 0 m x x + k x x = x ( m x + k x) = 0
le système est conservatif
dt
x + k x = 0 et on retrouve l’équation différentielle
On a donc soit x = 0 , soit m 1
1
ma 2ω02 = k a 2
2
2
2320
E = Ec + E p =
d’où le résultat important :
:160
.179
.65.2
En écrivant la solution sous la forme x(t ) = a cos(ω0t + ϕ )
1
1
1
– l’énergie cinétique : Ec = mv 2 = mx 2 = ma 2ω02 sin 2 (ω0t + ϕ )
2
2
2
1 2 1 2 2
– l’énergie potentielle élastique : E p = k x = ma ω0 cos 2 (ω0t + ϕ )
2
2
puisque k = mω02
07:1
x + ω02 x = 0 avec ω0 = k / m
582:
8891
L’énergie mécanique est proportionnelle au carré de l’amplitude a . Elle est
constante au cours du temps, pendant le mouvement il y a transformation d’énergie
potentielle en énergie cinétique et réciproquement.
techn
iques
:211
0753
41. Le sens de parcours de la trajectoire de phase : pour z > 0 , z / , montre qu’au
départ la balle est en z = 0 avec une vitesse de +10 m.s −1 . L’altitude maximale
atteinte est 2,5 m, quand la balle repasse en z = 0 , sa vitesse n’est plus que
−4, 8 m.s −1 on en déduit que de l’énergie a été dissipée par frottement sur l’air.
Quand z → −∞ il semble apparaître une vitesse limite −6, 5 m.s −1 , ce qui confirme
l’existence d’un frottement fluide sans que l’on puisse déduire une modélisation
particulière.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
JG
42. a) Le système est la bille ; la tension T exercée par le fil est perpendiculaire à son
déplacement, donc elle ne travaille pas, le poids est conservatif. La conservation
de l’énergie mécanique dans ( R) galiléen s’écrit en prenant l’origine de l’énergie
potentielle de pesanteur pour θ = π / 2 et en notant vv la vitesse au passage par la
position verticale (l’énergie potentielle de pesanteur est − mgz avec Oz vers le
bas) :
1
0 − mgl cos θ 0 = mvv2 − mgl vv = 2 gl (1 − cos θ0 ) = 0,82 m.s −1
2
la valeur paraît grande pour 15° mais la longueur est 1 m, le modèle sans
frottement sur l’air est limite.
JG
b) La tension T exercée par le fil est perpendiculaire au déplacement de la bille,
donc elle ne travaille pas.
Avec l’axe Oz orienté « vers le bas », le poids, force conservative, dérive d’une
énergie potentielle E p = − mgz + cste ; avec z = l cos θ et en prenant l’origine de
l’énergie potentielle de pesanteur pour θ = π / 2 , il vient E p = − mgl cos θ .
l
g
T0 = 2π
2320
(1) et la période
:160
g
l
θ = − sin θ
.179
.65.2
07:1
6929
5448
1
L’énergie cinétique, sachant que la vitesse de la bille est v = lθ , est
1
Ec = m(lθ) 2 .
2
En l’absence de travail de forces non conservatives, l’énergie mécanique dans le
référentiel ( R ) galiléen est conservée au cours du mouvement :
1
E = m(lθ) 2 − mgl cos θ = cste (2)
2
Par dérivation de cette constante par rapport au temps, on retrouve l’équation
différentielle après simplification par θ :
:211
0753
582:
8891
Attention, pour obtenir directement l’équation (2) par intégration de l’équation
(1), il faut préalablement multiplier les deux membres par θ !
G
v2
G
c) La projection de la RFD sur u r donne : mg cos θ − T = − ml θ 2 = − m
l
π
1
et θ qcq : mv 2 − 0 = mgl cos θ + 0
Et le théorème de l’ E C entre θ =
2
2
G
T = 3mg cos θ
soit
G
T = 3mg , ce qui montre bien que la
iques
Au passage par la verticale θ = 0 ,
techn
tension du fil, force de réaction, dépend des autres forces et du mouvement.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
G
43. a) L’anneau est soumis à son poids mg et à la
JG
Z
réaction d’axe R . En l’absence de
frottement cette réaction est perpendiculaire
G
G
G
G
à la tige, R = Rn . La direction de Rn n’est
G
ω
uz
cependant pas connue précisément : elle est
O
G G
Y
dans le plan ( u z , uθ ) .
G
u
θ
θ
La relation fondamentale de la dynamique
M• G Δ
s’écrit dans le référentiel galiléen ( R ) :
X
ur
G
G JG
x
G
ma ( M ) = mg + R (1)
mg
Le mouvement de M est dans le plan
horizontal, on utilise des coordonnées cylindriques : r = x , θ = ω t (posant
θ = 0 à t = 0 ) et z = 0 . L’accélération dans la base cylindrique est :
G
G
G
G
G
G
a = (
r − rθ 2 ) u r + (2rθ + rθ) uθ + z u z = ( x − xω 2 ) u r + (2 x ω ) uθ
G
G
On projette la relation (1) sur u r pour éliminer R qui n’a pas de composante
dans cette direction :
&KDSLWUH
m ( x − ω 2x ) = 0 + 0
x − ω 2x = 0
qui s’intègre en :
x(t ) = A e ω t + B e −ω t , les conditions initiales x(0) = x0 et x (0) = 0 conduisent à
6929
5448
1
x0 ω t
( e + e −ω t )
2
x (t ) =
L’autre équation horaire θ = ω t conduit par élimination de t à :
x
x(θ ) = 0 eθ + e−θ
2
b) Le mouvement étant résolu, on va pouvoir calculer la réaction grâce aux
projections non utilisées de. la relation fondamentale de la dynamique. La
réaction a une composante verticale Rn z et une composante orthoradiale Rnθ
La relation (1) s’écrit en projection sur la
G G G
Z
base (ur , uθ , u z ) :
)
G
ω
O
Rn z
G
sur uθ : Rn θ = 2mω x = mx0ω 2 eω t − e −ω t
G
sur u z : Rn z = mg
G
G
La réaction Rn n’est pas égale à − mg !
θ
)
X
G
Rnz
M•
G
mg
JG
R
Y
G
R nθ
Δ
:211
(
8891
techn
air
Micro
liquide
Ve
G
g
corps Vi
ue e
t des
44. Soit V = Vi + Ve le volume du corps où Vi est le
volume immergé et Ve le volume émergé.
G JJG G
L’équilibre du corps se traduit par mg + Π = 0
soit en projection sur la verticale ascendante et en
négligeant la poussée d’Archimède due à l’air par
rapport à celle due au liquide (car ρ air ρliquide ) :
iques
3RXVVpHG·$UFKLPqGH
ρ s (Ve + Vi ) g − ρlVi g = 0 (1) soit ρ sVe = ( ρl − ρ s )Vi = 0 ce qui suppose
ρ s < ρl
ure d
e Mé
caniq
Seuls les corps moins denses que le liquide flottent sur le liquide ; c’est le cas d’une
bille de fer ( ρ s = 7,8 g/cm3 ) qui flotte sur le mercure ( ρl = 13, 6 g/cm3 ) et bien sûr
de la glace sur l’eau (une bouteille remplie d’eau et fermée, mise au congélateur, se
brise !).
périe
45. La relation (1) de la question 44. donne directement le rapport du volume immergé
V
Vi
ρ
au volume total : i =
= s = 92 % . Si on considère la masse volumique de
V Vi + Ve ρl
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
l’eau salée ρ l = 1, 03 kg.L−1 on obtient 89 %, d’où le drame du Titanic…
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
− mg
2320
+ Rnθ
582:
0
0
0753
x − xω 2
0
m 2 xω
= 0
:160
.179
.65.2
07:1
(
46. Le bouchon cylindrique a une surface de base S ,
une hauteur H , une masse volumique ρ s ; son
h
ρs
≈ 0,5 et hauteur H ≈ 5 cm . La situation est fortement
ρl
T ≈ 0, 3 s avec
:160
AN :
Avec le bouchon horizontal :
air
2
.
air
Pour un déplacement z R et eau
au premier ordre : δ V ≈ 2 RHz
V
V
Vi = − dV = − 2 RHz
2
2
Le principe fondamental en projection sur Oz :
vue de profil
:211
ρl
vue de face
z
iques
ce qui suppose ρ s =
0753
SH
g =0
2
582:
eau
Équilibre :
8891
équilibre
2320
modélisée et l’expérience difficile à réaliser.
− ρ s SHg + ρl
.179
ρs H
ρl g
conduisant à des oscillations sinusoïdales de période T = 2π
.65.2
07:1
6929
5448
1
équilibre dans l’eau de masse volumique ρl conduit H
à un volume immergé donné par la relation :
S
ρ s SH = ρlVi éq (1)
en négligeant la poussée d’Archimède dans l’air.
Soit h l’écart en dynamique par rapport à la position d’équilibre, alors la relation
fondamentale de la dynamique projetée sur la verticale ascendante donne :
(1)
ρg
ρ s SHh = − ρ s SHg + ρl (Vi éq − hS ) g =− ρl hSg ou encore h = − l h
ρs H
techn
O
Micro
instant quelconque
4g
z = 0 soit une période :
πR
πR
T = 2π
.
4g
AN : pour R = 1cm , T ≈ 0, 2 s du même ordre que le cas précédent.
e Mé
caniq
ue e
t des
z+
mz = − ρ sVg + ρ lVi g et avec m = ρ sV ure d
eQHUJLHPpFDQLTXH
e Na
Écol
tiona
le Su
périe
G
K ·G
K G
G
§1
47. a) F dr = − dE P F = − ¨ K 1 2r − 22 ¸ u r = − K 1r u r + 22 u r
r ¹
r
©2
G
G
Si r est grand F ≈ − K 1 r u r force de rappel attractive,
&KDSLWUH
G K G
si r est petit F ≈ 22 u r force répulsive dirigée de O vers M .
r
b) Le système est conservatif à un paramètre.
d 2EP
d 2EP
2K 2
=
K
+
et
pour
r
=
r
,
1
e
dr 2
r3
dr 2
13
6929
5448
1
§K ·
re = ¨ 2 ¸
© K1 ¹
dE P
K
= K 1r − 22 = 0 pour
dr
r
07:1
= 3K 1 > 0 , l’équilibre est stable.
re
.65.2
Les valeurs grandes ou petites du a) le sont par rapport à re .
:160
.179
48. On lit à E1 = U m 2 , le système étant lié : x min = 1, 4 cm , x max = 2, 0 cm et on a
x m = 1, 6 cm . Donc x min ≈ 0, 9 x m et x max ≈ 1, 3 x m . On a x ∈ [ x min , x max ] .
2320
Pour E 2 , le système est lié si x < x M mais en état de diffusion si x > x M .
(attention U m < 0 ). Finalement la vitesse doit être
582:
cinétique E c = U M − U m
8891
Pour s’échapper la particule doit avoir une énergie mécanique supérieure ou égale à
U M , placée en x m elle a l’énergie potentielle U m , il lui faut donc l’énergie
1
:211
0753
§ 2 (U M − U m ) · 2
dirigée vers les x > 0 et avoir une norme supérieure à v lib = ¨
¸ .
m
©
¹
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
49. Utiliser l’expression de la force de rappel
équilibre
élastique vue dans la réponse à la question
19. On oriente l’axe vertical Ox vers le bas,
G
G
tel que u et = u x . La longueur à vide du
l
l1
ressort (sans masse) est l0 . La longueur est 0
l
l1 lorsqu’on y accroche la masse, en
0
G
situation d’équilibre : mg − k (l1 − l0 ) = 0 (1)
mg
x
x
En mouvement, l’allongement du ressort est
l − l0 = (l1 + x) − l0 où x représente l’écart
par rapport à la situation d’équilibre ; l’équation du mouvement s’écrit alors en
projection sur Ox :
d 2x
d 2x
m 2 = mg − k [ (l1 − l0 ) + x ] et à l’aide de (1) : m 2 = − k x
dt
dt
qui est l’équation de l’oscillateur harmonique horizontal de la question 19., avec ici
la signification de x donnée ci-dessus, x n’est pas l’allongement. Le choix de
l’origine à l’équilibre permet de ne pas avoir de terme constant dans l’équation
différentielle.
k
x + ω02 x = 0
En posant ω02 = , il vient l’équation classique : m
z (t )
6929
5448
1
50. Le système considéré est le corps M de masse m qui se
JG
R
comporte comme un point matériel. Il est soumis à son
G
G
M
poids − mg u z , à la réaction normale du plateau R u z et son
G
mouvement est connu : c’est celui du plateau avec lequel il P
mg
est en contact.
* La RFD pour M s’écrit alors en projection sur la verticale ascendante :
mz(t ) = − mg + R R(t ) = mg − m ω 2 a cos ω t
07:1
Attention : le corps M n’étant pas immobile, la réaction n’est pas égale (en
norme) à son poids.
.65.2
La réaction la plus faible (lorsque cos ω t = 1 ) vaut Rmin = mg − m ω 2 a ; le contact
.179
est maintenu tant que Rmin > 0 soit ω 2 < g / a = ω02 ce qui définit la pulsation
critique :
:160
g
a
ω0 =
8891
2320
L’accélération du plateau est alors z (t ) = − ω02 a cos ω t = − g cos ω t avec pour
maximum g , comme s’il était en chute libre !
:211
0753
582:
* À noter qu’à t = 0 (l’instant où M est posé sur P ), le plateau est en position
haute, à vitesse nulle. Au moment où il s’affaisse, son accélération est, pour
ω = 2ω0 , z (t = 0+ ) = − 4 g . Le corps de vitesse initiale nulle tombe au mieux en
chute libre soit avec une accélération de − g . Le contact est donc immédiatement
rompu ! Il se produira ultérieurement.
iques
0RXYHPHQWVGHSDUWLFXOHVFKDUJpHV
e Mé
caniq
ue e
t des
Micro
techn
51. Le théorème de l’énergie cinétique s’écrit :
2eΔV
1
= 59.106 m.s −1
m(v02 − 0) = eΔV v0 =
2
m
c
La vitesse est grande, environ , l’électron est en effet facilement relativiste. Le
5
calcul de R et T en mécanique classique est limite.
mv
d’où le rayon du cercle R = 0 = 6, 7 cm de l’ordre de la dimension du tube,
eB
2π m
et la période de rotation T =
= 7, 0 ns très faible compte-tenu de la vitesse.
eB
52. La force exercée sur la particule est essentiellement la force de Lorentz, on néglige a
G
G G G
priori le poids. F = q E + v ∧ B
)
ure d
(
e Na
Écol
tiona
le Su
périe
a) Pour que le mouvement soit rectiligne et uniforme, il faut, dans le référentiel
G G
G
G G
G JJJG
G G
terrestre galiléen : F = 0 , soit E = − v ∧ B = B ∧ v avec v = cste (la valeur
&KDSLWUH
11
.65.2
07:1
6929
5448
1
GG
GG
initiale). Donc
Donc BB est
est dirigé
dirigé suivant
suivant ++uuz z, , ce
ce résultat
résultat est
est indépendant
indépendant des
des
GG
EE
caractéristiques
caractéristiques qq et
et m
m de
de la
laparticule.
particule.La
Lavaleur
valeurde
de vv est
estimposée
imposéev 0v 0== . .
BB
A.N. v 00 == 1,
1, 0.10
0.1055 m.s
m.s−−11.. Cette
Cette valeur
valeur permet
permetde
derevenir
revenirsur
surl’hypothèse
l’hypothèse« «poids
poids
GG GG
Latrajectoire
trajectoiresera
seradonc
doncparabolique
parabolique
négligeable
négligeable »» qui
qui aa peu
peu de
de sens
sens sisi FF == 00 !!La
gg
dans le champ
champ de
de pesanteur,
pesanteur, mais
maisde
deconcavité
concavité
très
trèsfaible,
faible,laladéviation
déviationdue
due
22vv0 02 2
au poids est
est négligeable
négligeable àà l’échelle
l’échelledu
dudispositif.
dispositif.
11
b) On obtient
obtient la
la vitesse
vitesse vv00 après
mv0 02 2−−00==qqUU0 0 avec
avec qq==2 2e e
aprèsaccélération
accélération: : mv
22
11
:160
.179
§§ 44eeUU00 ··22
§§44eeUU0 0· ·2 2
vv0101 == ¨¨
¸¸ etet vv0202 ==¨¨
¸¸
©© mm11 ¹¹
©© mm2 2 ¹ ¹
11
2320
§§44eeUU0 0· ·2 2
UU
EE UU
Pour passer
passer par
par FF ilil faut
faut vv0101 == == 11
1 1 ==¨¨
¸¸
ddBB ©© mm1 1 ¹ ¹
BB dd BB
11
582:
8891
§§44eeUU00 ··22
U
U
Et pour l’autre
l’autre isotope
isotope :: 22 == ¨¨
¸¸
dd BB ©© mm22 ¹¹
:211
11
0753
11
§§mm ··2 2
IlIl vient
vient:: UU22 ==UU1 1¨¨ 1 1¸¸
©©mm2 2¹¹
yy
ue e
t des
Micro
53. a) Comme ilil n’y
n’y aa que
que des
des champs
champs magnétiques
magnétiques qui
qui
agissent, la
la norme
norme de
de la
la vitesse
vitesse n’est
n’est pas
pas modifiée.
modifiée.
GG
Dans le demi-espace
demi-espace xx >> 00,, lala particule
particule décrit
décrit un
un ::BB2 2
mv
mv
puiselle
ellearrive
arriveen
enAA
demi-cercle
demi-cercle de
de rayon
rayon RR11 == 00 ,, puis
qB
qB00
et pénètre
pénètre dans
dans l’espace
l’espace xx << 00,, toujours
toujours avec
avec une
une
et décrit
décrit un
un demi-cercle
demi-cerclede
derayon
rayon
vitesse de norme
norme vv00 et
mv
mv00
R2 =
== 22 RR11 qui
qui l’amène
l’amène en
enB,
B,avec
aveclalavitesse
vitesse
q B00 22
G
v 0 u xx , donc
donc dans
dans les
les mêmes
mêmes conditions
conditions qu’en
qu’en O.
O. Du
Du
GG
point B, elle
elle revient
revient en
en O,
O, mais
mais avec
aveclalavitesse
vitesse −−vv0 0uux x, ,
ce qui l’amène
l’amène en
en O
O′′…
…
GG
′ ′ ::BB
OO
1 1
périe
ure d
e Mé
caniq
BB
GG
v 0v 0
OO
AA
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
b) La durée du
du trajet
trajet de
de O
O àà BB est
est::
ππ RR11 ππ RR22 ππ mm 22ππmm 33ππmm
ΔΔtt ==
++
==
++
==
vv00
vv00
qqBB0 0 qqBB0 0 qqBB0 0
5pSRQVHVDX[TXHVWLRQV
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
techn
iques
§§ 44 ··22
100¨¨ ¸¸ ==115
115VV,, l’écart
l’écartentre
entreles
lesdeux
deuxtensions
tensionsest
estsuffisamment
suffisamment
A.N. : U 22 == 100
©© 33 ¹¹
important
important pour
pour réaliser
réaliserexpérimentalement
expérimentalementlalaséparation.
séparation.
y
et la progression est de 2 R 2 − 2 R1 = 2 R1 , la vitesse de
dérive suivant Oy est donc :
JG
JG
2v G
2mv 0 qB0 G
2 R1 G
V dér =
uy =
u y V dér = 0 u y
3π
qB0 3π m
Δt
G
G
c) Avec B2 = − B0 u z , on obtient la trajectoire ci-contre :
JG
4R G
La vitesse de dérive est : V dér = − 1 u y ,
T
JG
2v G
V dér = − 0 u y
mv 0
2π R1
et T =
qB0
v0
G
: B1
07:1
6929
5448
1
G
⊗ B2
.65.2
π
.179
avec R1 =
G
v0
O
:160
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
0753
582:
8891
2320
54. a) 10 −15 s ; b) environ 1 centième de seconde, en fait de 1 ms à 1 s ; c) 20 min
chacun ! d) 1h 30 min ; e) 6 ans, environ 42 ans (mais ça change souvent) et de
l’ordre de 50 ans (mais elle évolue avec les nouvelles découvertes de gisements) ; f)
5 600 ans et 31 000 ans ; g) il y a environ 4,5 millions d’années, mais l’homme
moderne n’a que 200 000 ans ; h) environ 250 millions d’années ; i) 4,5 et 15
milliards d’années.
techn
iques
:211
55. a) environ 10 nm ; b) 7 ȝm ; c) 20 ȝm et 0,1 mm ; d) 50 à 60 ȝm ; e) 6,40 m pour
un grand requin blanc (la baleine bleue peut atteindre 30 m, mais il s’agit d’un
cétacé !), 115 m pour un séquoia ; f) environ 10 km (30 000 pieds) ; g) 380 km ;
h) 380 000 km et 150 millions de km ; i) 4,2 années-lumière.
ue e
t des
Micro
56. a) le micromètre par heure ; b) quelques cm par an ; c) quelques m.s −1 et
10, 4 m.s −1 ; d) ≈ 160 km.h −1 ! et ≈ 300 km.h −1 ; e) ≈ 50 m.s −1 ; f)
340 m.s −1 ≈ 1 200 km.h −1 et 500 m.s −1 ; g) 8,0 km.s −1 ≈ 29 000 km.h −1 ; h) sondes
interplanétaires, de l’ordre de 40 km.s −1 dans le référentiel héliocentrique ; i)
300 000 km.s −1 .
e Mé
caniq
57. L’accélération est le taux de variation de la vitesse ; un corps dont la vitesse
augmente de 9,8 m.s −1 toutes les secondes est sujet à une accélération de 9,8 m.s −1
par seconde, soit 9,8 m.s −2 .
e Na
Écol
tiona
le Su
périe
ure d
58. Initialement L = 2π R , et ensuite L + ΔL = 2π ( R + h) , avec ΔL = 1 m .
ΔL
Par différence, la corde s’est élevée de h =
≈ 16 cm . Ce résultat est a priori
2π
surprenant (on s’attendait à moins !). Il le devient cependant moins lorsque l’on
remarque qu’il est indépendant du rayon R de l’objet sphérique. La hauteur h dont
s’élève la corde est la même lorsque l’expérience est faite avec une orange…
&KDSLWUH
G
v′
M (t ′)
•G
Δv
G
v
6929
5448
1
59. L’accélération est un vecteur représentant l’évolution
du vecteur vitesse, et donc même si la vitesse est
constante en norme, elle peut évoluer en direction, ce
qui est le cas dans un mouvement circulaire
(accélération normale dirigée vers le centre).
G
G
La figure représente les vitesses v et v′ du mobile
M sur une trajectoire circulaire (uniforme) entre
deux instants t et t ′ ; il apparaît géométriquement
que dans l’intervalle de temps t ′ − t = Δt , la vitesse a
G G
G
varié de v′ − v = Δv .
G
Δv
G
quand Δt → 0 .
L’accélération est la grandeur a = lim
Δt
• M (t )
.179
.65.2
07:1
G
v′
0753
582:
8891
2320
:160
60. 1. L’ensemble formé par les deux boules étant plus lourd que la grosse boule,
d’après la théorie d’Aristote, il tombe plus vite qu’elle.
2. Toujours d’après la loi d’Aristote, la petite boule tombant moins vite que la
grosse freine la chute de cette dernière de sorte que l’ensemble tombe moins vite
qu’elle.
Deux raisonnements tirés de la même loi aboutissent donc à deux conclusions
contradictoires. La seule façon pour Galilée d’éliminer ce paradoxe est d’affirmer
que toutes les boules tombent de la même façon, quelle que soit leur masse…
iques
:211
61. Un système peut être ouvert et de masse constante, il suffit qu’il reçoive, à tout
instant, la même quantité de matière, en masse, que celle qu’il cède à l’extérieur.
Les lois de Newton ne s’appliquent pas à ce système de masse constante.
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
caniq
63. Le ressort horizontal est soumis à une force F, que l’on retrouve en tout point.
Chaque partie s’allonge proportionnellement à sa longueur. On en conclut que des
ressorts de même nature, soumis à une même force, ont des allongements
proportionnels à leur longueur, soit :
k2
l
l
Δl1
= 01
= 01 avec F = k1 Δl1 = k 2 Δl 2 soit
k
l
Δl 2
l 02
1
02
On a bien sûr : k1 = k 2 si l 01 = l 02
Remarquer que la constante de raideur k du ressort de départ (association série des
deux parties de raideur k1 et k 2 ) est telle que kl 0 = k1l 01 = k 2l 02 avec l 0 = l 01 + l 02
1
1
1
soit
=
+
.
k
k1 k 2
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
techn
62. En appuyant sur un ressort avec une force de norme F pour le comprimer, il subit
une variation de longueur Δl = F / k , inversement proportionnelle à k . L’opérateur
qui appuie avec la même force sur deux ressorts tels que k2 > k1 provoque des
variations de longueurs Δl2 < Δl1 . Un ressort à faible raideur (dit mou comme dans
un stylo) est donc plus facile à comprimer (ou à étirer) qu’un ressort de grande
raideur (dit dur, comme ceux disposés entre deux wagons).
6929
5448
1
64. Les aiguilles et la mécanique de l’horloge tournent à chaque période du balancier ; si
l’horloge avance, c’est que la période imposée par le pendule est trop courte. Pour
l’augmenter, il suffit de desserrer la vis pour éloigner G de O ce qui augmente la
longueur l du pendule simple équivalent et, en augmentant la période T = 2π l / g ,
ralentit la mécanique.
2320
l′
0753
582:
8891
l
:160
.179
.65.2
07:1
65. Les métaux ont des masses volumiques assez différentes, celle de l’or est une des
plus grandes. Pour déterminer la masse volumique de la couronne, la mesure de la
masse ne pose pas de problème, mais la détermination du volume est évidemment
beaucoup plus difficile. Archimède, Grec vivant à Syracuse (en Sicile) au 3e siècle
avant JC propose soit de déterminer directement le volume grâce au volume d’eau
ayant débordé d’un récipient rempli à ras bord en immergeant totalement la
couronne, soit de façon plus précise en mesurant le poids de la couronne dans l’air
puis son poids apparent quand elle est plongée dans de l’eau.
m1
m2
Il vient pour les deux équilibres, avec l’égalité des moments :
:211
ρm = ρe
m1
m1 − m 2
iques
­ ρ mVgl = m1 gl ′
ρm
m
= 1
®
′
ρ
ρ
(
)
−
=
Vgl
m
gl
m
−
ρ
ρ
e
2
¯ m
m
e
2
m1
.
20
Or Archimède constate que la couronne dans l’eau perd plus du vingtième de son
poids : le roi a été trompé !
Remarquer que le raisonnement suppose un objet plein, si la couronne possède des
parties creuses, on trouve une masse volumique moyenne plus petite que la masse
volumique du métal.
ue e
t des
Micro
techn
Pour de l’or pur, ρ m ≈ 20 ρ e , on doit avoir m1 − m 2 =
e Mé
caniq
66. Car la poussée liée au poids du liquide déplacé (force verticale ascendante) est très
supérieure au poids du gaz déplacé (force verticale descendante) et ceci car
ρ gaz ≈ ρliquide /1000 ρliquide .
e Na
Écol
tiona
le Su
périe
ure d
67. Comme le glaçon dépasse du niveau d’eau, on peut penser que sa fonte va
augmenter le niveau, mais d’autre part le volume d’eau récupéré par la fonte est
inférieur au volume du glaçon, alors…? Avec les notations de la question 44., le
glaçon de volume Ve + Vi a pour masse ρ s (Ve + Vi ) soit exactement ρlVi d’après la
relation d’équilibre ; or ceci représente après la fonte un volume d’eau égal à Vi ,
preuve que le niveau d’eau dans le verre n’est pas affecté par la fonte du glaçon.
Cependant en toute rigueur, la partie supérieure du glaçon subit une poussée
d’Archimède dans l’air, donc le volume immergé dans l’eau est un peu plus petit et
&KDSLWUH
le niveau d’eau augmente théoriquement après la fonte du glaçon (cette
augmentation infime n’est pas mesurable, voir la question 66.).
07:1
6929
5448
1
Trois phénomènes agissent dans le sens de l’élévation du niveau des mers :
* La banquise est d’autant moins salée qu’elle est ancienne, en flottant sur de l’eau
salée elle déplace moins d’eau que ce qui résulte de sa fonte. Les icebergs, eux,
sont des blocs d’eau douce gelée. Cet effet est très faible.
* La fonte des glaces terrestres (l’Antarctique est un continent de terre recouvert de
glace)
* La dilatation de l’eau des océans du fait de l’augmentation de sa température.
ρ
2320
:160
.179
.65.2
68. On note M la masse de la bille, m la masse de la coquille et ρ la masse volumique
de l’eau. L’équilibre dans chaque cas, en négligeant la poussée d’Archimède dans
l’air, donne :
G
G G
bille dans la coquille : ( M + m) g − ρ V1 g = 0 V1 = ( M + m) ρ
G
G G
bille dans l’eau : mg − ρ V2′ g = 0 et la bille occupe V 2′′ = M ρ bille
m
M
+
< V1 car ρ bille > ρ
V 2 = V 2′ + V 2′′ =
ρ bille
582:
8891
Le volume d’eau effectivement déplacé est plus petit quand la bille est dans l’eau, le
niveau d’eau par rapport au bord du récipient est plus bas.
techn
iques
:211
0753
69. Pour une masse sensiblement identique, le volume total du corps (par celui de la
cage thoracique) augmente, ce qui permet de bénéficier d’une poussée d’Archimède
plus importante (de manière équivalente on peut dire que la densité du corps, voisine
de 1, diminue lorsque les poumons sont gonflés). L’eau de mer, par sa salinité, étant
légèrement plus dense que l’eau douce, pour un volume donné du corps, la poussée
d’Archimède est plus importante assurant une meilleure flottabilité (en particulier
dans la Mer Morte…).
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
71. Les forces de frottement bien sûr ne sont pas conservatives ; d’un point A à un
point B , leur travail dépend du chemin suivi. En effet, en ligne directe ce travail
dissipatif (prélevé sur l’énergie mécanique du système) est moindre que dans le cas
d’un trajet indirect (un arc de cercle par exemple qui est plus long).
Considérons un enfant sur une balançoire, grâce aux mouvements de ses jambes
(travail d’une force musculaire) il peut augmenter son énergie mécanique, ce que
l’on constate avec l’augmentation d’amplitude des oscillations.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
Micro
70. Contrairement à la question précédente, il n’est pas possible d’agir sur le volume du
sous-marin (la coque métallique du sous-marin est de volume invariable). Ceci
signifie que la poussée d’Archimède n’est pas modifiable. Pour permettre les
descentes et les remontées, on ne peut donc compter que sur une modification du
poids propre. Les sous-marins possèdent une double coque, en forme de poche (les
ballasts). Initialement remplis d’air lorsque le sous-marin est en surface, ces
réservoirs étanches sont progressivement remplis d’eau de mer pour alourdir le
sous-marin et lui permettre de plonger. Lorsqu’il souhaite remonter, les ballasts sont
vidés de leur lest grâce à de l’air comprimé qui en se détendant en chasse l’eau et
allège le submersible qui peut refaire surface…
6929
5448
1
72. La question de l’existence d’une énergie potentielle ne se pose que pour un champ
de force. Si elle existe E P est une fonction des coordonnées du point, ce qui n’est
pas le cas de l’énergie cinétique, qui dépend de la vitesse en ce point. La relation
générale δ W = dE C ne signifie pas que δ W soit une différentielle vis-à-vis des
coordonnées.
:160
.179
.65.2
07:1
G
G
G
G
73. a) Pour r = 0 , on lit r = 0 , soit a = (
r − rθ 2 ) u r + (2 rθ + rθ) uθ = r u r au point
G
d 2 r dr dr
G
=
= 0 en O. Donc a (r = 0) = 0 et r = 0 est une position
O. Avec
2
dt
dr dt
d’équilibre. Un petit déplacement dr > 0 donne d’après la trajectoire de phase
r > 0 , donc r / , l’équilibre est instable.
b) On a r = cste , donc r = 0 pour r = 0 (équilibre) et r = a : mouvement
circulaire uniforme (car θ = θ0 = cste ).
c) θ = θ = cste , la trajectoire est de type « spirale » qui s’enroule toujours dans le
2320
0
0
θ
0753
0
582:
8891
même sens.
Si r (0) = r0 > a , on lit r < 0 soit r 2 et tend asymptotiquement vers r = a
(car r → 0 ).
G
G
G
Plus précisément v = r u r + rθ uθ , pour r > a , r < 0 donc r diminue : r → 0
G
G
et rθ → aθ , donc v → aθ u
Micro
techn
iques
:211
Si r (0) = r0 < a , on lit r > 0 soit r / et tend asymptotiquement vers r = a
(car r → 0 ). Si r0 est inférieure à la valeur correspondant à r maximale, la
valeur de r augmente rapidement au départ.
a
caniq
ue e
t des
axe polaire
a
axe polaire
e Na
Écol
tiona
le Su
périe
ure d
e Mé
74. La force de frottement fluide qu’exerce l’air sur les corps en mouvement est toujours
opposée au vecteur vitesse et sa norme augmente quand la vitesse augmente.
Partons d’une situation où le corps est lâché avec une vitesse initiale nulle. Il est
soumis à deux forces de même direction mais de sens opposé : son poids qui initie et
accélère le mouvement et dont la norme est constante, et la force de frottement,
initialement nulle, qui s’oppose au mouvement et dont la norme croît avec celle de
la vitesse acquise, ce qui diminue la norme de l’accélération. Lorsque les deux
forces opposées ont même norme (limite asymptotique), alors l’accélération est
nulle, ce qui définit la vitesse limite.
&KDSLWUH
G
G
G G
Pour le modèle −λ v : mg − λ v = 0
m G
G
v lim =
g
λ
G
v lim =
m G
g
kg
6929
5448
1
G
G G G
Pour le modèle − k v 2 : mg − k v v = 0
07:1
À la question 41., la vitesse limite atteinte est de −6, 5 m.s −1 , soit
0,10 × 9, 8
≈ 0,15 kg.s −1 , que l’on peut donc déduire de la trajectoire de phase.
λ≈
6, 5
2320
:160
.179
.65.2
75. Lorsque la vitesse (en norme) est minimale, il en est de même pour l’énergie
cinétique, et donc d’après le théorème de la puissance cinétique :
dEc
GG
G
= 0 = mg .v − λ v 2
dt
GG
ce qui conduit à g.v > 0 , prouvant qu’à ce moment-là le mobile est déjà en « phase
descendante », donc après le sommet de la trajectoire.
iques
:211
0753
582:
8891
76. En électrostatique, la charge est immobile dans les positions initiale et finale ; elle
ne peut donc être libre, c’est-à-dire qu’elle est soumise à une autre force qui lors du
déplacement travaille contre la force électrostatique : on la représente par un
opérateur extérieur.
Le travail de l’opérateur pour amener la charge depuis l’infini de manière quasi
statique (afin que l’opérateur équilibre à tout instant la force électrostatique) est :
δ Wop. = −δ Wélec. = dE p
G
G
d’où le travail d’assemblage : Wop. = E p (r ) − E p (∞) où r est la position finale, et
qui s’identifie à l’énergie potentielle d’interaction du champ et de la charge.
Micro
techn
Rq : Le théorème de l’énergie cinétique donne dEc = δ Wélec. + δ Wop. = 0 ; comme
attendu, la charge ne reçoit pas d’énergie cinétique.
q>0
JG
E
G
sens du déplacement d r
∞
+
2eU
1 2
mv = eU v =
≈ 3.108 m.s −1 ; l’électron atteindrait la vitesse de la
m
2
lumière c et aurait une vitesse encore plus grande pour U > 250 kV ! En réalité
ceci n’est pas possible car la mécanique classique (de Newton) ne s’applique plus
dès lors que la vitesse des particules n’est plus très petite devant c et que les
particules deviennent relativistes. L’expression relativiste de l’énergie cinétique
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
77. On a
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
•
JG
F élec.
caniq
+
JG
F op.
e Mé
G
r
ue e
t des
Le schéma ci-dessous montre le déplacement d’une charge positive pour remonter le
potentiel (donc dans le sens opposé au champ) ; dans ce cas l’opérateur doit fournir
un travail positif.
6929
5448
1
§
·
1
Ec = m c 2 ¨
− 1 ¸ montre l’énergie cinétique peut augmenter sans que
¨ 1 − v2 / c2
¸
©
¹
la vitesse de la particule ne dépasse la vitesse c. On considère une particule comme
relativiste dès son énergie cinétique est supérieure au dixième de son énergie de
masse m c 2 .
techn
iques
:211
0753
582:
8891
2320
:160
.179
.65.2
07:1
78. Remarquons d’abord que le champ magnétique stationnaire ne joue aucun rôle dans
l’effet « d’accélération » des particules ; en effet, la force magnétique de Lorentz ne
travaille pas puisque perpendiculaire à la vitesse, et ne peut donc modifier la norme
de la vitesse d’une particule chargée. Ce rôle est dévolu au champ électrique.
Vu les vitesses considérables atteintes, les accélérateurs ou anneaux de stockage
(pour confiner les particules), ou machines de type « Tore supra » ou « Tokamak »
du projet Iter (pour confiner le plasma destiné à la fusion thermonucléaire), doivent
être de forme circulaire. Ceci nécessite la présence de champs magnétiques pour
incurver les trajectoires des particules chargées.
Dans un électroaimant conventionnel, le fil résistif dans lequel circule un puissant
courant à l’origine du champ magnétique provoque une surchauffe de la bobine et
l’énergie perdue est telle que le coût en énergie de l’aimant est très élevé, de plus
l’intensité doit être limitée pour ne pas atteindre la fusion des fils. Alors qu’une
bobine supraconductrice qui, à basse température, ne présente pas de résistance
électrique, permet d’obtenir un champ magnétique élevé, et donc d’être plus efficace
tout en étant moins coûteuse en énergie. L’introduction de la technologie des
aimants supraconducteurs (maintenus à des températures très basses, 1,8 K, qui
annulent quasiment la résistance électrique) a permis d’atteindre de très hautes
énergies dans les accélérateurs circulaires, la vitesse des particules étant voisines de
la vitesse de la lumière dans le vide.
Micro
([HUFLFHV
De 1 + e =
p=
caniq
1
1
2
+
=
et
rA rP
p
p
on déduit
rA
e Mé
Donc
ue e
t des
79. (MPSI) Cinématique d’un satellite terrestre (*)
p
p
car θ A = π ; rmin = rP =
car θ P = 0
a) rmax = rA =
1− e
1+ e
e=
2 rA rP
rA + rP
rA − rP
rA + rP
le Su
tiona
e Na
)
Écol
(
périe
ure d
AN : rA + rP = 2a ; rP = 8,0.10 3 km ; rA = 24.10 3 km ; p = 12.10 3 km ;
e = 0,50 ; l’ellipse est assez aplatie, rA = 3 rP et e < 1 cohérent avec
l’expression de r.
G
G
b) a = r − rθ 2 u r donc aθ = 2rθ + rθ = 0 que l’on multiplie par r ≠ 0 :
&KDSLWUH
2 r rθ + r 2 θ =
(
d r 2θ
dt
)=0
r 2 θ = C = cste
6929
5448
1
Comme r est maximal en A et minimal en P, r = 0 en ces deux points et
G
G
v = rθ uθ en A et en P et C = rA v A = rP v P
AN : C = 69.10 3 km 2 .s −1 , cohérent avec la distance à O.
rP
rA
07:1
v A = vP
.65.2
c) De la relation précédente on tire :
AN : v A = 2,9 km.s −1 , donc v A ≠ v P le mouvement
M′
•à t + dt
.179
n’est pas uniforme.
:160
d) Le secteur balayé pendant dt : [ OM (t ), OM (t + dt ) ]
a pour valeur approchée l’aire du triangle OMM ′ , soit
compte tenu des propriétés du produit vectoriel (voir le O
chapitre 0, Produit vectoriel), une surface :
2320
θ
•M
àt
r
8891
axe polaire
JJJJG
1 JJJJG JJJJJG
1 JJJJG
1 G
G
G
OM ∧ MM ′ =
OM ∧ dOM =
ru r ∧ ( dru r + rd θ uθ )
2
2
2
1 2
G
2 dS =
r d θ u z , or r θ = C donc θ garde un signe constant, on écrit :
2
t1 + Δt
:211
vitesse aréolaire constante
iques
dS C
=
= cste
dt
2
0753
582:
dS =
t2
t 2 + Δt
Micro
techn
Ceci permet de comprendre que lorsque le satellite est
plus proche de O (en P) il va plus vite que lorsqu’il est
plus éloigné (en A par exemple).
t1
ΔS
2
ure d
v
mg cos θ − Rn = − ma 2θ = − m
a
car r = a = cste et v = a θ . On en déduit :
z
⊕
A
O
θ
a
G
g
C
G
uθ
G
u
G r
mg
périe
v2
a
Il est donc évident que R n ne peut s’annuler que pour cos θ < 0 soit entre C et A.
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
R n = mg cos θ + m
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
80. Looping dans une gouttière
Les forces appliquées sur le point sont, dans le référentiel
de la gouttière lié au référentiel terrestre galiléen, le poids
et la réaction normale car il n’y a pas de frottements. La
G
G
direction de Rn est connue, portée par u r car le mouvement a lieu sur une surface.
G
La RFD projetée sur u r donne :
6929
5448
1
Le théorème de l’ E C entre B et M quelconque permet de calculer v :
1
mv 2 − 0 = mg ( h − ( a − a cos θ ) ) + 0
2
2h
§
·
− 2¸
En remplaçant : Rn = mg ¨ 3 cos θ +
a
©
¹
R n est une fonction décroissante de θ , sa valeur est minimale en A, donc la
5a
2
.65.2
h>
R n > 0 pour cos θ = −1 donne la condition :
07:1
condition R n ≠ 0 en A suffit pour assurer le looping.
5a
2
z dec. =
et z = a − a cos θ
1
( a + 2 h) < h
3
:211
Y
G
Rn
B
techn
iques
81. Franchissement d’une bosse
a) Les forces appliquées sur le point sont, dans le
référentiel terrestre galiléen, le poids et la réaction
normale car il n’y a pas de frottements. La direction
G
de Rn est connue, car le mouvement a lieu sur une
surface, elle est portée par la normale à la surface
G
uY .
G
La RFD projetée sur u Y donne :
R − mg cos α = mY , un décollage nécessite simul-
0753
582:
a<h<
8891
2320
:160
.179
Donc pour passer le point A il faut partir sur la rampe de lancement au moins un
demi-rayon au-dessus de A, ce qui montre que la condition énergétique v A > 0 est
largement insuffisante. La valeur limite 5a 2 permet le looping.
Si le point M quitte la gouttière entre C et A,
−1 < cos θ < 0 , pour R n = 0 fixant cos θ :
α
Micro
A
n
G
mg
caniq
ue e
t des
tanément : R n = 0 et Y > 0 , ce qui est manifestement impossible. Attention
dans cette question de ne pas poser Y = 0 , ce qui impose un non décollage, ou
pire d’invoquer une « compensation » du poids et de la réaction, alors que la
réaction n’est jamais connue a priori (sa valeur dépend de l’accélération).
ure d
e Mé
b) Pour atteindre le point B la condition énergétique suffit, soit v B ≥ 0 , le théorème
de l’énergie cinétique donne entre A et B :
1
1
mv B 2 − mv A 2 = −mg ( z B − z A ) = − mg R cos α
2
2
1
périe
v A ≥ ( 2 g R cos α ) 2
e Na
Écol
tiona
le Su
il faut donc
&KDSLWUH
c) Pour l’étude du mouvement du point matériel
sur la sphère, on se place en un point
quelconque, mais favorable, sur le schéma :
z
D
M
G
Rn
⊕
π
θ
.
2
G
L’expression obtenue est bien sûr valable en
mg
tout point, notamment entre B et D où
−α ≤ θ ≤ 0 .
O
C
La relation fondamentale s’écrit :
G G
G
mg + Rn = ma
avec pour un mouvement circulaire :
v2 G
dv G
G
G
G
a = Rθ 2 u r + Rθ uθ = − u r +
uθ
R
dt
v2
G
et en projection sur la normale (ici u r ) : R n − mg cos θ = − m
R
2
v
Rn = mg cos θ − m
R
On calcule v avec le théorème de l’énergie cinétique entre A et M quelconque :
1
1
mv 2 − m v A 2 = − mgR cos θ soit v 2 = v A2 − 2 gR cos θ
2
2
mv A2
R
mg
=
3
cos
θ
−
En remplaçant :
n
R
G
Entre B et D, θ < 0 , cos θ > 0 et cos θ / de B à D. On a donc Rn
au point
:211
0753
582:
8891
2320
:160
.179
.65.2
07:1
6929
5448
1
0<θ <
iques
B, soit pour θ = −α .
min
1
techn
Le palet ne décollera pas entre B et D si R n , B > 0 , soit v A < ( 3 g R cos α ) 2
(1)
v A2
3 gR
ue e
t des
cos θ d =
Micro
d) Après D, le palet décolle pour R n = 0 avec θ > 0 :
décollage pour θ d > α
e Mé
caniq
En effet pour θ = α , v = v B (même cote), or R n , B > 0
1
2
.
3
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
des conditions sur α : cos α >
ure d
Rq : Pour atteindre D il faut v A ≥ ( 2 g R ) 2 ce qui avec la relation (1) impose
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Avec la condition précédente on a : cos θ d < cos α .
82. Un pendule tournant
a) Dans le référentiel terrestre galiléen lié à l’axe Oz , les forces
G
sur m sont le poids, la tension T1 du fil supérieur dirigée vers
G
A, la tension T2 du fil inférieur dirigée vers B. Le triangle
ABM est équilatéral. Le mouvement ici est connu, on cherche
G
G G
G
les forces. La RFD donne mg + T1 + T2 = − m ω 2 R u r , le
z
L
π
B
G
ur
G
G
T
L 2 mg
§ Lω 2
·
+g¸
T1 = m ¨
© 2
¹
.65.2
π
π
π
­
2
°° T1 cos 6 + T2 cos 6 = m ω L cos 6
®
° − mg + T sin π − T sin π = 0
1
2
°̄
6
6
M
07:1
mouvement étant circulaire uniforme de rayon R = L cos .
6
G
G
En projection sur u r et u z :
6929
5448
1
G
A L T
1
G
g
.179
2320
:160
§ Lω 2
·
−g¸
T2 = m ¨
2
©
¹
8891
b) Le fil supérieur ne peut pas se détendre, le fil inférieur reste tendu si :
0753
582:
2g
L
ω>
ρ glace
ρ liq
techn
iques
Vim = V0
dans l’air sur la partie émergée. Il vient
déduire d’une valeur arbitraire de V0 .
b) Le raisonnement est celui de la question 67. :
Micro
Vim
= 0, 92 , on retrouve la proportion immergée classique. La valeur du
V0
rapport est plus significative que la valeur de Vim que l’on pourrait
ue e
t des
AN :
:211
83. Fonte d’un glaçon
G
G G
a) À l’équilibre : ρ glaceV0 g − ρliqVim g = 0 , en négligeant la poussée d’Archimède
h1 = h0
e Mé
ρ salée
caniq
c) Le glaçon correspond à de l’eau douce. Avec le nouveau volume immergé Vim′ :
ρ
ρ
G
G G
ρ glaceV0 g − ρ saléeVim′ g = 0 Vim′ = V0 glace < Vim = V0 glace car ρ salée > ρ liq
ρ liq
h1 > h0
ure d
soit
e Na
Écol
tiona
le Su
périe
d) L’équilibre se traduit par :
G
G
G G
ρ glace (V0 − Vliège ) g + ρliègeVliège g − ρliqVim′′ g = 0
&KDSLWUH
6929
5448
1
ª ρ glace
º
ρ liège
Vim′′ = «
(V0 − Vliège ) +
Vliège »
ρ liq
¬« ρ liq
¼»
Après la fonte du glaçon, la bille de liège flotte sur l’eau et « déplace » un
ªρ
º
volume d’eau : « liège Vliège » . De plus l’eau liquide résultant de la fonte du
¬« ρ liq
¼»
ªρ
º
glaçon correspond au volume « glace (V0 − Vliège ) »
¬« ρ liq
¼»
correspond à Vim′′ ; on en déduit
07:1
et la somme des deux
.179
.65.2
h 2 = h0
2320
:160
84. Oscillations amorties d’un plateau
a) L’énoncé indique que le système { m + plateau} est conservatif. On choisit Oz
vers le haut, E p pes = + mgz , en posant E p pes = 0 pour z = 0 . On choisit de plus
:211
0753
582:
8891
z = 0 à la position initiale du plateau.
La conservation de l’énergie mécanique (cinétique, potentielle de pesanteur et
potentielle élastique) du système {plateau + boule} s’écrit :
1
1
2
mv 2 + mgz + k ( l − l 0 ) = cste , avec l 0 la longueur initiale (avant rencontre
2
2
boule-plateau) car avec un plateau sans masse, la longueur initiale est la longueur
à vide. Attention h0 , h1 et h2 sont positifs, z est algébrique et v = z .
mg §
2kh0 ·
¨1 + 1 +
¸
k ©
mg ¹
Micro
h1 =
techn
iques
Entre h0 ( v = 0, z = h0 et l − l 0 = 0 ) et h1 ( v = 0, z = −h1 et l − l 0 = − h1 ) :
1
0 + mgh0 + 0 = 0 − mgh1 + kh12 soit, sachant que h1 > 0 :
2
rapide des diverses valeurs.
mg §
2kh0 ·
¨ −1 + 1 +
¸
k ©
mg ¹
ure d
h2 =
e Mé
caniq
Entre h0 ( v = 0, z = h0 et l − l 0 = 0 ) et h2 ( v = 0, z = h2 et l − l 0 = h2 ) :
1
0 + mgh0 + 0 = 0 + mgh2 + kh22 soit, sachant que h2 > 0 :
2
périe
AN : h 2 = 5,8 cm
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
On n’a pas h1 = h2 (mais h1 > h2 ) car la position z = 0 n’est pas position
d’équilibre pour le plateau avec la boule.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
AN : h1 = 6,8 cm , les valeurs numériques vont permettre une comparaison plus
b) À l’équilibre la somme des forces est nulle soit − mg − k (le − l0 ) = 0
( l e − l 0 ) < 0 le ressort est comprimé à l’équilibre, en posant he = −(l e − l 0 ) :
mg
k
6929
5448
1
he =
AN : he = 0,5 cm
07:1
On a clairement h1 − h2 = 2he ou mieux, h1 − he = h2 + he indiquant que
l’amplitude des oscillations est symétrique par rapport à cette position
d’équilibre.
8891
2320
:160
.179
.65.2
La variation d’énergie mécanique entre la situation initiale et la situation finale
est :
1
m2 g 2
ΔE = (0 − mghe + khe2 ) − (0 + mgh0 + 0) = −
− mgh0 < 0
2
2k
À cause des frottements qui amortissent le mouvement, le système oscillant n’est
pas conservatif et le théorème de l’énergie cinétique indique que la variation
d’énergie mécanique est égale au travail des forces non conservatives, ici négatif.
ue e
t des
Micro
techn
iques
:211
0753
582:
85. Équilibre de masses chargées électriquement
a) Les particules chargées s’attirant, leurs
A
charges sont de signe contraire. La figure de
JJG
gauche montre l’équilibre de la particule P1
JG
P
Fe
•
1
α T1
sous l’action de trois forces concourantes : le
G
poids mg (vertical), la force électrostatique
JJG
JG
JJG
JG
G α
•
Fe (horizontale) et la tension T1 du fil
−T 1
R P Fe mg
1
G
(inclinée d’un angle α sur la verticale).
mg
Soit R le point formant avec A et P1 un
triangle rectangle en R ; l’angle α est alors donné par :
RP ( L − d ) / 2 1
sin α = 1 =
= (1 − d / L) = 0,167 α = 9, 6 ° et tan α = 0,169
AP1
L
2
(l’angle étant faible, on a tan α ≈ sin α )
JG
e Mé
caniq
b) Deux méthodes pour déterminer Fe en fonction de mg et α , en éliminant T1 :
Ź méthode 1 à considérer après étude du chapitre 7 : par le théorème des
moments par rapport à l’axe Δ A passant par A , en choisissant le sens
trigonométrique comme sens positif :
JJG
G
ure d
- TΔ1A = 0 ; - ΔFeA = + Fe × AR = Fe L cos α ; - ΔmgA = − mg × RP1 = − mgL sin α
alors la nullité de la somme des moments donne Fe = mg tan α
le Su
périe
Ź par la RFD ; la somme des trois forces étant nulle, on peut écrire
JG
G JJG
mg + Fe = −T 1 , ce qui se comprend bien sur la figure de droite ; on lit alors
e Na
Écol
tiona
directement tan α = Fe / mg sans calcul !
&KDSLWUH
De Fe =
q2
4πε 0 d
2
= mg tan α , on déduit q = 4πε 0 d 2 mg tan α soit :
q = 2, 7.10−7 C , valeur des charges toujours très faible en coulombs.
6929
5448
1
c) Alors T1 = mg / cos α soit T1 = 0,10 N , évidemment très proche de mg .
.65.2
07:1
86. Pendule contrarié
Il s’agit d’un calcul du même type qu’à la question 80. La tension ne travaille pas,
on peut écrire la conservation de l’énergie mécanique de la masse entre la situation
initiale (angle θ0 ) et la situation où la masse est au plus haut (point H ), sur la
iques
:211
0753
582:
8891
2320
:160
.179
verticale entre O et A en notant vH la vitesse à ce moment-là (inutile de transiter
par le point B le plus bas) :
1
0 − mgl cos θ0 = mvH2 − mg [ h − (l − h) ] soit vH2 = 2 g (−l cos θ0 + 2h − l ) (1)
2
Le mouvement de la masse est alors un cercle de rayon l − h autour de A ; la
relation fondamentale de la dynamique au moment où la masse passe en H et
v2
projetée sur la verticale descendante (attention aux signes) donne : m H = T + mg
l−h
(2)
La condition fil tendu se traduit par T > 0 (il ne faut pas que le fil se relâche), et s’il
en est ainsi en H , il en a été de même avant. Ce qui s’établit comme dans la
question 80. en calculant la tension T en un point quelconque et en montrant que T
est une fonction décroissante de θ . D’après (2) : vH2 > (l − h) g , et avec l’expression
5h − 3l
2l
Micro
cos θ0 <
techn
de vH2 donnée par (1), cela conduit à une condition sur θ0 :
e Mé
caniq
cos θ 0 > 0 h > 3 l / 5 moins évident, mais qui montre le lien avec la question
du looping.
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
87. (MPSI) Le mouvement d’un pendule simple est-il plan ? (*)
a) Les schémas donnent r = L sin θ et z M < 0 .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
La valeur limite permet le tour complet.
Comme on s’en doutait, l’angle initial θ0 doit donc être suffisamment important, et
surtout il y a des conditions sur la position du clou pour qu’il existe une solution :
cos θ 0 < 1 h < l évident.
z
ϕ
p
x
p
O
y
G
uϕ
θ
zM
6929
5448
1
:
Oz
•M
vue de dessus
r
d (r 2ϕ )
=0
dt
r 2ϕ = cste
.179
soit
.65.2
07:1
G
b) Les forces sont le poids et la tension du fil ; la RFD en projection sur u ϕ ,
direction sur laquelle ni le poids, ni la tension n’ont de composante, donne :
m ( 2rϕ + rϕ ) = 0 en multipliant par r ≠ 0 : 2rrϕ + r 2ϕ = 0
8891
2320
:160
c) Les conditions initiales sont r = L sin θ 0 et ϕ = 0 , donc r 2ϕ = 0 , et comme r
n’est pas constamment nul :
ϕ = 0 et ϕ = cste
techn
iques
:211
0753
582:
Le mouvement est plan, dans le plan vertical contenant le fil à l’instant initial.
Plus généralement ϕ (0) = 0 avec r0 ≠ 0 suffit, c’est-à-dire que la vitesse initiale
peut avoir une composante dans le plan vertical contenant le fil initialement.
Dans le cas où r0 = 0 , le fil et la verticale sont confondus à l’instant initial ; c’est
G
la direction de v 0 qui définit le plan vertical du mouvement.
Tout ceci se vérifie aisément expérimentalement. Le caractère plan du
mouvement d’un pendule n’est donc pas du tout acquis et dépend des conditions
initiales.
avec E p = 0
en z = 0 , les
1
mv 0 2 + mgh . En arrivant au sol, z = 0 :
2
ure d
conditions initiales fixe E =
1
mv 2 + mgz
2
e Mé
Le système est conservatif : E =
caniq
ue e
t des
Micro
88. Rebonds d’une balle : portrait de phase
a) Il s’agit du calcul classique de la chute libre sans frottements. C’est un
mouvement à accélération constante traité à la question 16., la vitesse initiale est
suivant Oz et le point de départ est à h au-dessus du sol :
dv
sur Oz : z = − g vz (t ) = − gt + v0 z = − gt + v0 ,
dt
1 2
puis z (t ) = − gt + v0 t + h car z (0) = h
2
e Na
Écol
tiona
le Su
périe
1
1
2
2
mv s 2 = mv 0 2 + mgh v s = v 0 + 2 gh
2
2
v + v0
G
attention v s = v s .
Pout t = t s : −vs = − gts + v0 t s = s
g
&KDSLWUH
0
h+
0
v0
0
−
v 02
2g
h
v 02
2g
07:1
+
dz dv z
z
−v 0
h+
.65.2
−v s
z
h
.179
vz
v 02 − v z2
2g
z =h+
6929
5448
1
v0 − v z
g
dz
v
On étudie z (v z ) :
=− z
dv z
g
b) En remplaçant t par
:160
−v s
2320
vz
v0
B
z
h
C
iques
−v s
:211
0753
582:
v0
A
8891
c) La trajectoire de phase est obtenue par
symétrie : v z ( z ) .
On part du point A, en B l’altitude maximale
est atteinte ( v z = 0 ) et en C la balle arrive au
sol avec une vitesse négative. De A à C le
système est conservatif, ce qui se traduit par
une symétrie de la courbe par rapport à l’axe
Oz.
vz
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
soit ΔE = ΔE p = mg Δz ≈ 0,1 × 10 × (−1) ≈ −1, 0 J
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ure d
e Mé
caniq
ue e
t des
Micro
techn
d) En un point, le signe de z indique le sens de parcours. La partie CD correspond à
un rebond de la balle, on a de nouveau un mouvement de chute libre de D à E,
avec une nouvelle vitesse initiale à partir du sol. En C la norme de la vitesse est
d’environ 6, 0 m.s −1 , juste après le rebond, elle n’est plus que de 4, 0 m.s −1 .
Ceci correspond à une diminution de l’énergie cinétique, comme la cote est restée
quasiment constante ( z = 0 ) l’énergie potentielle de pesanteur n’a pas variée,
donc l’énergie mécanique diminue, une partie de l’énergie mécanique est dissipée
1
1
pendant le rebond. Graphiquement, entre C et D : ΔE = ΔE c = m v D2 − m vC2 .
2
2
0,1 (4 2 − 6 2 )
≈ −1, 0 J
Numériquement ΔE ≈
2
On retrouve cette diminution d’énergie avec la diminution d’énergie potentielle
au sommet de la trajectoire, quand v z = 0 : on lit z B ≈ 1, 8 m et z E ≈ 0, 8 m ,
89. Molécule diatomique
a) Le problème est à un paramètre : dE p = − f r dr
6929
5448
1
dU G
δ 2e 2 G
ur = −
u r force attractive
dr
4πε 0 r 2
Le premier terme de U (r ) correspond à −
entre deux charges de signes opposés.
dU G
9A G
u r = + 10 u r force répulsive,
dr
r
importante quand r est petit (à très courte distance), elle peut s’interpréter comme
la répulsion des noyaux.
07:1
Le second terme de U ( r ) correspond à −
.179
.65.2
dU
δ 2e 2
9A
=
− 10 qui s’annule pour
2
dr
4πε 0 r
r
b)
1
§ 9 A 4πε 0 · 8
re = ¨
¸
2 2
© δ e ¹
:160
(1)
8891
+
re
+∞
r
0−
:211
U
0
582:
−
dU dr
+∞
re
0
0753
r
2320
U
techn
iques
Um < 0
Micro
Um
ue e
t des
c) U (r ) est minimale pour r = re équilibre stable, l’existence de la molécule
est assurée par l’équilibre entre force attractive et force répulsive.
caniq
d) On envisage un mouvement au voisinage de la position d’équilibre stable, on va
faire apparaître un oscillateur harmonique linéarisé.
§ d 2U ·
2 δ 2e 2
90 A
1 § 2 δ 2 e 2 90 A ·
§ df ·
=
−
=
−
=
− 8 ¸
¨
¨ 2 ¸
¨
¸
4πε 0 re3
re11
re3 © 4πε 0
re ¹
© dr ¹ re
© dr ¹ r
e Mé
e
ure d
2 δ 2e 2
§ df ·
et en remplaçant re8 avec la relation (1) : ¨
=
−
<0
¸
π ε 0 re3
© dr ¹ re
f ( re + dr ) = −
le Su
périe
On a donc f (re ) = 0 (équilibre) et
2 δ 2e 2
dr
π ε 0 re3
e Na
Écol
tiona
force équivalente à une force de rappel élastique avec une constante de raideur :
&KDSLWUH
k =
ω
k
1
et f = 0 =
m
2π
2π
2 δ 2e 2
π ε 0 re3 m
6929
5448
1
e) ω 02 =
2 δ 2e 2
π ε 0 re3
C
582:
8891
2320
:160
.179
.65.2
07:1
P
90. Sélecteur de masse (*)
a) L’ion étant positif, il est accéléré dans le sens du
m1
JG
champ E ; celui-ci doit donc être dirigé comme sur
m2
JG
la figure de I vers O (ce qui est confirmé par des
• B
O
:
potentiels décroissants dans le même sens).
La conservation de l’énergie mécanique s’écrit pour
JG
un électron entre I et O :
E
−2eVO
1
0 + 0 = mv02 + eVO v0 =
I
2
m
−2 N AeVO
= 210 km.s −1 , vitesse non relativiste
v0 =
M Au
0753
JG
b) Le sens correct du champ B est vers l’avant du plan de figure (vérifier que la
J
G
G
force ev0 ∧ B est bien dirigée de O vers C ).
techn
iques
:211
v2
mv
Le rayon r0 est donné par : m 0 = ev0 B r0 = 0 et conduit à un champ
r0
eB
magnétique
M v
B = Au 0 = 0,87 T (ce qui est un champ fort)
N Aer0
Micro
1
(en effet tous les ions
m
n’ont pas même vitesse au passage par O ), d’où finalement r0 en m ce qui
permet d’envoyer vers des points P différents des ions ayant même charge, mais
une masse différente : c’est le principe du sélecteur de masse.
Pour m2 < m1 , on a r2 < r1 comme indiqué sur la figure.
périe
ure d
e Mé
JG
Rq : Si après la phase d’accélération IO par le champ E , on remplace le champ
JG
magnétique B par un autre champ électrique, dirigé suivant OC , donc
perpendiculaire au précédent, la déviation qui en résulte est indépendante du
rapport q / m ; ce dispositif ne pourrait donc servir de sélecteur de masse,
d’où la nécessité d’utiliser un champ magnétique.
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
d) Comme r0 = α m (où α est une constante), la variation de rayon δ r0
provoquée par une variation de masse δ m est donnée par :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
c) Le rayon de courbure r0 est en mv0 et la vitesse v0 en
δ r0
r0
=
1 δm
(par dérivée logarithmique)
2 m
Une largeur de fente D permet une variation maximale de rayon δ r0 = ±
D
m par rapport à la masse m
r0
6929
5453
9
correspondant à une variation de masse δ m = ±
de l’ion Au + .
δm
2
δm
=
soit Dlim = r0
≈ 5 mm ,
m min 197
m min
07:1
Le tableau périodique donne
D
2
.179
.65.2
réalisable sans problème.
Avec D ≤ Dlim , il n’y a alors que les ions Au + à passer par la fente en P .
2320
:160
4XHVWLRQVRXYHUWHV
582:
8891
91. Randonnée en montagne
L’endroit existe car si l’on fait partir deux sages en même temps (à 9h tous les deux
le même jour), l’un d’en bas et l’autre d’en haut, ils se croiseront forcément
puisqu’ils empruntent le même chemin.
d
τ1
et v2 =
d
τ2
tr =
, on obtient :
τ1 τ 2
τ1 + τ 2
et
techn
Avec v1 =
iques
:211
0753
On note d la distance parcourue lors de la randonnée. Il s’agit de deux mouvements
rectilignes uniformes. On oriente Ox vers le haut et on prend l’origine en bas
(départ à t = 0 ) :
­ x1 = v1t
d
v1
et x1 = x 2 (rencontre) tr =
et xr = d
®
v1 + v2
v1 + v2
¯ x 2 = d − v 2t
xr = d
τ2
τ1 + τ 2
Micro
AN : τ 1 = 3 h et τ 2 = 2 h t r = 1, 2 h après le départ, soit rencontre à 10 h 12.
ue e
t des
x r = 0, 4 d , le point de rencontre est évidemment plus proche du point de
départ bas puisque la vitesse en montée est plus petite qu’en descente.
e Mé
caniq
92. Hauteur atteinte par un bouchon de champagne
Indication : On n’a accès qu’à une vitesse moyenne sur 10 ms. Réfléchir à la date de
la première photo.
e Na
Écol
tiona
le Su
périe
ure d
On remarque d’abord que les bouchons sur les 3 premières photos ne sont pas
alignés, ce qui pourrait indiquer que la vitesse augmente au début. Mais il n’est pas
certain que la première photo corresponde exactement au départ du bouchon. Pour
avoir une valeur approchée de la vitesse initiale il est donc préférable de choisir la
vitesse moyenne entre 10 ms et 20 ms (images 2 et 3).
&KDSLWUH
:160
.179
.65.2
07:1
6929
5453
9
Entre la 2e et la 3e image, en 10 ms, le bouchon de taille estimée à 5 cm a parcouru
une distance (entre deux points homologues) égale à environ 2,5 fois sa taille soit
environ 13 cm. Sa vitesse « initiale » est donc estimée à :
13.10−2
v0 ≈
= 13 m.s −1
10.10−3
Si h est la hauteur atteinte par le bouchon de champagne, la conservation de
l’énergie mécanique du bouchon entre l’instant « initial » et l’instant au plus haut
est :
1 2
v2
mv0 + 0 = 0 + mgh h = 0 soit h ≈ 8 m
2
2g
L’ordre de grandeur (un peu plus de deux étages) semble respecté, la valeur est
certainement surestimée puisqu’on a négligé les frottements. On remarque que 3
données sur 4 de l’énoncé sont inutiles...
8891
2320
93. Densimètre
Indication : Le densimètre est plongé dans le liquide dont on veut mesurer la
densité.
:211
0753
582:
Le densimètre flotte sur ce liquide et la lecture se fait sur les graduations au niveau
de la surface libre. Dans l’eau la surface libre doit correspondre à la graduation 1,00.
G JJG G
L’équilibre du densimètre s’écrit : mg + Π = 0 soit en projection sur la verticale
ascendante et en négligeant la poussée d’Archimède due à l’air par rapport à celle
due au liquide :
− mg + ρ hS = 0 où h représente la partie immergée.
techn
iques
AN : ρ = 1,0.10 3 kg.m −3 pour l’eau (densité 1 par définition) donne h = 25,0 cm ,
soit une graduation 1,00 à 3,0 cm du bord supérieur.
Micro
Les alcoomètres fonctionnent sur le même principe, la quantité d’alcool présente se
traduisant par des différences de masse volumique.
A2
A1
M1
r θ
r
r
r
A3
A4
ure d
On cherche la trajectoire suivie par chaque mouche, ainsi que les équations horaires
r (t ) et θ (t ) , définissant le mouvement sur ces trajectoires.
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
π
n
Le triangle OM 1M 2 est rectangle isocèle car OM 1 = OM 2 et OM
. En
1M 2 =
4
G
G
projetant le vecteur vitesse porté par M 1M 2 et dirigé vers M 2 sur u r et uθ :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
94. Quatre mouches aux sommets d’un carré (*)
Indication : On remarque que les quatre mouches jouent
un rôle identique et donc que le système est
invariant, à chaque instant, par rotation de
π / 2 autour de O . Les positions, à un
instant quelconque, sont celles représentées
sur la figure ci-contre.
6929
5453
9
­°V cos ( π / 4 ) = − r (1)
G
avec V = || V || = cste
®
°̄V sin ( π / 4 ) = r θ (2)
Le rapport des deux équations donne l’équation différentielle à variables
séparables :
dr = − rd θ s’intégrant en r = λ e − θ soit avec les conditions initiales :
2
t + cste et avec les conditions initiales :
2
r = a −V
.65.2
(1) r = − V
la trajectoire est une spirale logarithmique.
07:1
r = ae−θ
2
t
2
8891
©
V 2 ·
t¸
a 2 ¹
2320
§
θ = − ln ¨ 1 −
:160
.179
V 2 θ
V 2
1 2
V=
dt et après intégration et calcul de
e ou e −θ θ =
(2) θ =
r 2
a 2
a 2
la constante additive avec les conditions initiales :
2a
V
τ=
0753
θ (t ) croît et r (t ) décroît, r = 0 pour t = τ
582:
Durée du vol :
:211
Distance parcourue :
chaque mouche vole à vitesse constante, chacune parcourt donc :
iques
L =Vτ = 2a
Micro
techn
Chaque mouche effectue un nombre infini de tours autour de O en une durée finie
et en parcourant une distance finie. La longueur de la spirale est 2 a .
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
95. Une vache à la patinoire
La vache constitue un système pseudo isolé puisqu’aucune force horizontale ne
s’applique sur elle (pas de frottement de glissement), et que verticalement l’absence
de mouvement se traduit par une somme de forces nulle (poids et réaction normale).
Par hypothèse, le centre de masse G de la vache est immobile dans le référentiel
galiléen de la patinoire, car il l’est à l’instant initial.
JG d pG G
G
G JJJG G
F=
= 0 p = cste = p (t = 0) = 0
dt
Mais le système « vache » se scinde en deux, avec d’un côté la bouse de masse
m = 5 kg expulsée à une vitesse V = 10 cm.s −1 et de l’autre une vache soulagée de
M = 495 kg , qui, pour assurer au système total une quantité de mouvement nulle se
met en mouvement dans le référentiel terrestre à la vitesse v telle que :
JG
G
G G
p = mV + M v = 0
&KDSLWUH
6929
5453
9
Le centre de masse reste immobile, mais la vache prend une vitesse de sens opposé à
celui de la bouse expulsée, et de norme :
m
v = V soit v ≈ 1 mm.s −1
M
La bouse partant d’un côté, la vache doit partir du côté opposé afin d’assurer que le
centre de masse G reste bien immobile sur la patinoire. C’est le principe des objets
à réaction (de type fusée...).
.179
.65.2
07:1
96. Le saut à l’élastique
Indications : Prendre g = 9,8 m.s −2 , choisir un axe Oz orienté vers le bas tel que
sur le pont z = 0 et traiter le problème avec l’énergie.
8891
2320
:160
Pendant la première phase du mouvement où l’élastique n’est pas tendu, l’homme
subit une accélération en chute libre sur une hauteur égale à la longueur à vide A 0 de
l’élastique, et pendant la seconde phase du mouvement où l’élastique se tend
progressivement, l’homme subit une décélération ; si l’on note z f l’altitude finale à
laquelle sa vitesse s’annule lorsque l’allongement de l’élastique est maximal, la
conservation de l’énergie mécanique entre z = 0 et z = z f (les deux forces, poids et
e Mé
caniq
mg ·
§
2
2
2
z 2f − 2 ¨ A 0 +
¸ z f + A 0 = 0 (1) ou encore z f − 2A éq z f + A 0 = 0
k
©
¹
mg
= 80 + 0, 78 ≈ 80,8 m
En effet, l’expression entre parenthèses A éq = A 0 +
k
représente la longueur A éq de l’élastique à l’équilibre lorsque l’homme y est
périe
ure d
accroché au repos, l’allongement de l’élastique étant alors seulement de 78 cm à
cause de sa grande raideur.
Des deux solutions z f = A éq ± A éq2 − A 02 , celle avec le signe – soit z f ≈ 69 m est
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
non physique puisque inférieure à z = A éq ; celle avec le signe + soit z f ≈ 92 m est
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
techn
iques
:211
0753
582:
tension de l’élastique, sont conservatives) s’écrit, l’axe Oz étant orienté suivant la
verticale descendante :
1 2
1
mv − mgz + k (A − A 0 )2 = cste
2
2
1 2
* sachant que l’énergie cinétique mv est nulle dans l’état initial et final,
2
* que l’énergie potentielle de pesanteur − mg z passe de 0 à − mg z f ,
* et que l’énergie potentielle élastique nulle pendant la première phase passe, dans
1
la seconde phase, de 0 à k ( z f − A 0 )2 :
2
1
0 + 0 + 0 = 0 − mg z f + k ( z f − A 0 ) 2
2
l’altitude z f atteinte est donnée par une équation du second degré :
très inférieure à la hauteur H = 112 m du pont et laisse une distance de sécurité de
H − z f = 20 m suffisante : la saut est sans risque.
6929
5453
9
Rq 1 : À l’issue de la première phase du mouvement où l’élastique n’est pas tendu,
la vitesse v0 atteinte en z = 80 m est donnée par la conservation de
.65.2
07:1
l’énergie mécanique au cours de la chute de z = 0 à z = A 0 :
1
0 + 0 = mv02 − mg A 0 v0 = 2 g A 0 soit v0 = 39, 6 m.s −1 ≈ 143 km.h −1 ,
2
une vitesse impressionnante, et le frisson est garanti !
Il s’agit ici de la vitesse obtenue en négligeant les frottements.
Rq 2 : La limite de sécurité est atteinte lorsque l’altitude finale z f coïncide avec la
.179
hauteur H = 112 m sous le pont ; l’équation (1) donne alors la valeur de m
·
k § H 2 + A 02
− A 0 ¸ ≈ 470 kg .
¨
g © 2H
¹
Pour que le saut devienne dangereux, il faudrait que 6 personnes de 80 kg
en moyenne s’accrochent au même élastique pour sauter simultanément... !
8891
2320
:160
correspondante : m =
iques
:211
0753
582:
97. Chute libre
JG avec une accélération supérieure à g
JG
On note T la tension exercée par le fil sur la masse 1 (du haut) et F la force
exercée par le ressort sur cette même masse (le ressort est évidemment étiré). Le
JG
ressort exerce alors la force − F sur la masse 2 (du bas). À l’équilibre la projection
du principe fondamental sur l’axe Ox donne :
­mg − T + F = 0
®
¯mg − F = 0
techn
Juste après la coupure ( t = 0 + ), la continuité des positions des masses entraîne une
continuité de l’allongement et donc une continuité de F : F = mg .
Micro
Les projections du PFD, à t = 0 + , donnent :
­ma1 = mg + F
®
¯ma 2 = mg − F
ue e
t des
­a1 = +2 g
®
¯a 2 = 0
Soit une accélération supérieure à g pour la masse 1.
caniq
En notant x1 et x 2 les abscisses des masses, avec la même origine en O :
ure d
e Mé
­mx1 = mg + k (A − A 0 ) = mg + k ( x 2 − x1 − A 0 ) (1)
®
¯mx2 = mg − k (A − A 0 ) = mg − k ( x 2 − x1 − A 0 ) (2)
e Na
Écol
tiona
le Su
périe
La somme donne :
d 2 ( x1 + x2 )
= 2 g x1 (t ) + x2 (t ) = gt 2 + At + B
2
dt
&KDSLWUH
La différence, en posant
2k
m
:
d 2 ( x2 − x1 − A 0 )
= −2k ( x2 − x1 − A 0 ) x2 (t ) − x1 (t ) − A 0 = C cos ω 0 t + D sin ω 0 t
dt 2
6929
5453
9
m
ω0 =
.179
.65.2
07:1
Avec les conditions initiales :
mg
x1 (0) = 0 et x2 (0) = A 0 +
cf. (2) à t = 0 + avec a 2 = 0 ,
k
x1 (0) = 0 et x 2 (0) = 0 en considérant une continuité des vitesses (pas de choc),
mg
mg
on obtient : A = 0 , B = A 0 +
,C=
et D = 0 , d’où les équations horaires :
k
k
8891
2320
:160
1 2 mg
­
°° x1 (t ) = 2 gt + 2k (1 − cos ω 0 t )
®
° x (t ) = 1 gt 2 + mg (1 + cos ω t ) + A
0
0
°̄ 2
2
2k
que l’on peut aussi écrire :
iques
:211
0753
582:
1 2 mg
­
°° x1 (t ) = 2 gt + 2k (1 − cos ω 0 t )
®
° x2 (t ) = ¨§ A 0 + mg ·¸ + 1 gt 2 − mg (1 − cos ω 0 t )
k ¹ 2
2k
©
¯°
techn
Les masses oscillent autour d’une position en mouvement uniformément accéléré
(mouvement d’ensemble en chute libre avec l’accélération g ).
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Na
Écol
'\QDPLTXHGXSRLQWPDWpULHO
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
Rq : On peut obtenir une accélération initiale 3g pour la masse 1 en prenant 2m
pour la masse 2. Mais si cette accélération est trop importante, l’hypothèse de
continuité de la vitesse pourrait ne pas être valide.
ue e
t des
caniq
e Mé
ure d
périe
le Su
tiona
e Na
Écol
582:
0753
:211
iques
techn
Micro
:160
2320
8891
.179
.65.2
07:1
6929
5453
9
07:1
6929
5453
9
&KDSLWUH
6ROLGHHQURWDWLRQDXWRXU
G·XQD[HIL[H
.65.2
/HFRXUVG·DERUG
:160
.179
/HVPRXYHPHQWVVLPSOHVG·XQVROLGH
2320
1. Quelle définition peut-on donner d’un solide ?
8891
2. Un solide S est en translation par rapport à un référentiel ( R ) . Que peut-on dire du
G
vecteur vitesse v ( M )( R ) pour un point M quelconque du solide par rapport à celle
0753
582:
du centre de masse G ? Comment distinguer une translation rectiligne d’une
translation circulaire ? Donner un exemple dans chaque cas. À quelle condition une
translation est-elle uniforme ?
techn
iques
:211
3. Un solide S est en rotation autour d’un axe fixe Δ par rapport à un référentiel ( R ) .
L’axe Δ est pris comme axe Oz d’un système de coordonnées cylindriques. Quelle
JJJJG
G
est la vitesse v (O )( R ) du point O ? Comment s’exprime le vecteur OM pour un
point M quelconque du solide ? Décrire le mouvement du point M et donner son
G
vecteur vitesse v ( M )( R ) .
Micro
0RPHQWFLQpWLTXHPRPHQWG·LQHUWLHSDUUDSSRUWjXQD[H
caniq
ue e
t des
G
4. Donner la définition du moment cinétique σ O ( R ) au point O d’un point M de
G
masse m et de vitesse v ( M )( R ) dans le référentiel (R).
Définir le moment cinétique de ce même point matériel par rapport à un axe Δ .
Exprimer σ Δ en utilisant des coordonnées cylindriques d’axe Oz.
périe
ure d
e Mé
5. Pour un solide en rotation à vitesse angulaire ω autour d’un axe fixe Δ = Oz
constitué d’une infinité de points matériels M i de masse m i , former le moment
G
cinétique total σ O ( R ) et le développer sur la base locale cylindrique d’axe Δ .
G
Comment à partir de σ O ( R ) est défini le moment cinétique σ Δ du solide par rapport
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
à l’axe Δ ? Déduire son expression en fonction de ω et définir J Δ , moment
d’inertie du solide par rapport à l’axe de rotation à exprimer en fonction des masses
m i et des distances à l’axe ri ; commentaires.
0RPHQWG·XQHIRUFHFRXSOHOLDLVRQFRQWDFW
6929
5453
9
6. Comment est modélisée une action mécanique localisée en un point ? Donner un
JJJG
JG
exemple. Une force F s’exerce en un point M ; quel est le moment M O de cette
force en un point quelconque O ? Cas particulier du moment en M . Exprimer
JJJG
G
M O en fonction de F .
07:1
7. Quel est le moment M Δ de cette force par rapport à un axe Δ orienté et passant par
.65.2
O . Exprimer M Δ en utilisant des coordonnées cylindriques d’axe Δ = Oz .
:160
.179
8. Définir la résultante et le moment résultant des forces s’exerçant sur un système de
points. Comment sont définies forces intérieures et forces extérieures ? Que peut-on
dire des forces intérieures, pour un système de deux points matériels ? Pour un
solide ?
8891
2320
9. Qu’appelle-t-on couple ? Quelle caractéristique fondamentale possède son moment
vectoriel ? Donner des exemples de couples.
0753
582:
10. Qu’appelle-t-on liaison pivot ? Donner des exemples. Qu’entend-on par liaison
parfaite ?
11. Quelle condition permet de traduire la rupture de contact entre deux solides ?
iques
:211
/RLGXFHQWUHGHPDVVHHWORLGXPRPHQWFLQpWLTXH
techn
12. Rappeler la loi (ou théorème) du centre de masse pour un système fermé quelconque
dans un référentiel galiléen ( R ) .
ue e
t des
Micro
13. Énoncer la loi (ou théorème) du moment cinétique pour un système fermé
quelconque en un point fixe O . Comment s’écrit-il par rapport à un axe Δ pour un
solide en rotation autour de cet axe ?
14. Dans quel cas il y a-t-il conservation du moment cinétique par rapport à l’axe ? Citer
un exemple.
caniq
eQHUJLHFLQpWLTXHHWORLGHO·pQHUJLHFLQpWLTXH
ure d
e Mé
15. Rappeler la définition de l’énergie cinétique Ec( R ) dans ( R ) d’un point M de
G
masse m et de vitesse v ( M )( R ) , puis la généraliser à un système de points matériels
M i de masse m i .
le Su
périe
Comment s’écrit l’énergie cinétique totale Ec( R ) dans le cas d’un solide en
translation ?
Exprimer ensuite Ec( R ) dans le cas d’un solide en rotation à vitesse angulaire ω
e Na
Écol
tiona
autour d’un axe fixe Δ = Oz en fonction de J Δ et ω .
&KDSLWUH
6929
5453
9
16. Énoncer pour un système de points matériels fermé, le théorème de la puissance
cinétique et le théorème de l’énergie cinétique. Quel résultat essentiel distingue de
manière générale le théorème de l’énergie cinétique des deux autres théorèmes de la
mécanique (de la résultante cinétique et du moment cinétique) ? Dans quel cas le
travail des forces intérieures est-il non nul ? Citer des exemples.
.65.2
07:1
JG
17. Calculer en coordonnées cylindriques la puissance P( R ) d’une force F d’orientation
quelconque s’appliquant en un point M d’un solide en rotation autour de l’axe fixe
Δ = Oz ; l’exprimer en fonction du moment de la force par rapport à l’axe.
8891
2320
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
:160
.179
18. Dans le cas particulier du solide, que peut-on dire du travail des actions intérieures ?
Appliquer ce résultat au solide en rotation autour d’un axe fixe Δ , et montrer que la
loi de la puissance cinétique redonne la loi du moment cinétique de la question 13.
:211
0753
582:
Le sens du vecteur rotation d’un solide (et par conséquent le signe de sa
projection sur l’axe) est donné par la règle du tire-bouchon lorsque celui-ci est
tourné dans le sens du mouvement réel de rotation. Rappelons que les angles
doivent être définis à partir d’un axe référence fixe dans le référentiel d’étude,
et orientés.
Micro
techn
iques
Il convient toujours de caractériser d’abord la nature du mouvement d’un
solide ; suivant qu’il est en translation ou en rotation autour d’un axe fixe Δ ,
une « formule toute faite » s’applique pour l’énergie cinétique :
1 G
1
Ec( R ) = m v 2 (G )( R ) ou Ec( R ) = J Δω 2
2
2
ue e
t des
Les seuls termes utilisables pour le mouvement d’un solide sont translation et
rotation (non applicable à un point !). Les qualificatifs rectiligne, circulaire,
hélicoïdal, elliptique…s’appliquent à des points.
caniq
Attention, une translation n’est pas forcément rectiligne ! Et une translation
rectiligne pas forcément uniforme !
ure d
e Mé
Le centre de masse G d’un solide homogène et possédant un centre de
symétrie est ce centre de symétrie : par exemple, le milieu d’une tige
homogène, le centre d’un disque ou d’un cylindre homogène, …
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
Les moments d’inertie usuels (toujours donnés) sont les suivants :
– tige homogène de masse m et de longueur l par rapport à un axe Gz passant
1
par son milieu G et perpendiculaire à la tige : J G z = ml 2
12
07:1
6929
5453
9
– tige homogène de masse m et de longueur l par rapport à un axe Az passant
1
par son extrémité A et perpendiculaire à la tige : J A z = ml 2
3
– un disque ou un cylindre homogène de masse m et de rayon R par rapport à
1
son axe de révolution Gz : J G z = mR 2
2
– un cerceau homogène de masse m et de rayon R par rapport à son axe de
révolution Gz : J G z = mR 2
:160
.179
.65.2
– un pendule simple suspendu en O constitué d’une masse quasi ponctuelle m
à l’extrémité d’une tige (ou d’un fil) de masse négligeable et de longueur l par
rapport à un axe horizontal Ox et perpendiculaire au plan d’oscillation :
J O x = ml 2
8891
2320
Commencer par faire un dessin représentant le système à étudier. S’il comporte
des angles, éviter la plage autour de 45° (le sinus et le cosinus y sont trop
voisins !).
ue e
t des
Micro
techn
iques
:211
0753
582:
Comme dans tout problème de mécanique, il faut d’abord :
– définir le système étudié : en général, il est évident, sauf s’il est composé de
plusieurs sous-systèmes auquel cas une réflexion préalable s’impose sur les
avantages / inconvénients de telle partie du système.
– préciser la nature du mouvement : translation ? rotation autour d’un axe
fixe ? dans ce cas préciser le sens d’orientation de cet axe qui impose
l’orientation des angles dans le plan perpendiculaire.
– préciser le référentiel d’étude ( R ) , en général le référentiel du laboratoire
considéré comme galiléen.
– faire l’inventaire des actions en les représentant en couleur sur la figure
(attention cependant aux forces de réaction).
Il convient ensuite de définir une stratégie car il y a souvent plusieurs
possibilités d’étude avant de se lancer tête baissée dans des calculs longs ou
inutiles…
ure d
e Mé
caniq
Lorsqu’on parle des « actions » sur un solide il faut comprendre deux choses :
la résultante des forces (qui peut modifier un mouvement de translation) et le
moment résultant de ces forces (qui peut modifier un mouvement de rotation).
Lorsque la résultante est nulle, alors l’action se réduit à un couple, ce qui
montre bien que le moment résultant (non nul) n’est pas le moment de la
résultante (qui serait nul) ! Dans ce cas assez fréquent, les actions engendrent
une rotation autour d’un axe fixe sans translation du centre de masse.
e Na
Écol
tiona
le Su
périe
Lorsqu’un solide est en équilibre, la somme des moments des forces extérieures qui s’appliquent sur ce solide est nulle ; il est alors possible de choisir
librement le point ou l’axe par rapport auquel sont évalués ces moments.
&KDSLWUH
6929
5453
9
Lorsqu’un solide en mouvement est suspendu à un fil, la tension du fil n’est
pas a priori égale en norme au poids du solide. La tension d’un fil est une force
de réaction.
Ne pas hésiter à évaluer le moment d’une force à l’aide du bras de levier ce qui
évite souvent les erreurs de calcul ou de signe (voir les questions 6. et 7.).
.65.2
07:1
JG
Le moment d’une force F s’appliquant en M par rapport à l’axe Δ est une
grandeur scalaire mais algébrique ; il est positif si la force tend à entraîner M
autour de Δ dans un sens positif certes arbitraire mais clairement indiqué sur la
figure ; il est négatif dans le cas contraire.
2320
:160
.179
Les équations différentielles sont du second ordre par rapport au temps. Les
constantes d’intégration (y penser !) se déterminent à partir des conditions
initiales sur la vitesse et la position.
iques
:211
0753
582:
8891
Pour intégrer par rapport au temps une équation du type J Δθ = − mga sin θ , il
suffit de multiplier préalablement les deux membres par θ , ce qui conduit à la
relation (la constante d’intégration E est l’énergie mécanique du système)
1 2
J Δθ = mga cos θ + E .
2
Une étourderie consiste à intégrer en J Δθ = mga cos θ , c’est-à-dire par rapport
au temps dans le membre de gauche et par rapport à θ dans le membre de
droite (relation évidemment inhomogène) !
Micro
techn
Dans le cas d’un solide en rotation autour d’un axe fixe, la loi du moment
cinétique par rapport à un axe et la loi de la puissance cinétique conduisent à la
même équation (et donc ne pas écrire les deux en croyant trouver une relation
supplémentaire !).
caniq
ue e
t des
Dans la loi de la puissance (ou de l’énergie) cinétique intervient la puissance
(ou le travail) des forces intérieures, il ne faut pas les oublier dans le cas des
systèmes déformables (ou de l’association de deux solides articulés) ; ces
grandeurs sont nulles dans le cas où le système est constitué d’un solide
unique.
ure d
e Mé
Préférer la loi de la puissance cinétique lorsque l’énoncé demande une
accélération et la loi de l’énergie cinétique lorsque l’énoncé demande une
vitesse.
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
Éviter de recalculer le travail du poids ; il y a moins d’erreurs de signe à
prendre l’opposé de la variation d’énergie potentielle de pesanteur
W poids = −ΔEp pes .
$SSOLFDWLRQVGLUHFWHVGXFRXUV
0RXYHPHQWHWFHQWUHGHPDVVH
6929
5453
9
19. Donner un exemple de solide S en translation rectiligne uniforme et un autre en
translation rectiligne non uniforme par rapport à un référentiel ( R) ; quelle analogie
et quelle différence ont leurs vecteurs vitesse ?
manche
tête
8891
a
C
d
•
ω
l
O
iques
:211
0753
582:
22. Équilibrage d’une girouette
Une plaque métallique carrée de côté a , d’épaisseur
négligeable, de masse M , homogène, est solidaire d’un axe
de longueur l , de masse négligeable, dont l’extrémité
inférieure O repose sur la tête de mât ; un collier C assure
le guidage.
On équilibre la plaque par une masse ponctuelle m placée
sur une tige sans masse à une hauteur l + a / 2 de O . Donner
la distance d de la masse à l’axe pour que le centre d’inertie
de l’ensemble soit sur l’axe (équilibrage statique).
2320
:160
.179
21. Un club de golf est composé de deux parties rigidement liées entre
elles, le manche et la tête du club. Expliquer, en s’appuyant sur des
schémas simples, pourquoi, en tendant son index à l’horizontale et
en s’arrangeant pour poser le club en équilibre dessus à
l’horizontale, on détermine la position de G .
.65.2
07:1
20. Comment distinguer pour un solide un mouvement de translation circulaire d’un
mouvement de rotation ? Donner un exemple dans chaque cas.
techn
)RUFHPRPHQWGHIRUFHPRPHQWG·LQHUWLHHWpQHUJLHFLQpWLTXH
ue e
t des
Micro
23. En quelle unité s’exprime un moment de force ? Avec quelle autre unité ne faut-il
pas la confondre ?
24. À quelles conditions le moment d’une force par rapport à un axe est-il nul ?
L’illustrer par l’exemple de l’ouverture d’une porte.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
JJG
25. Une règle homogène de longueur AB = l a une
FA
B
C
masse m . Elle repose horizontalement en son
milieu sur un appui C et aux extrémités A et
JJG
JG
JG
D
A
FB
B , on lui applique deux forces F A et F B de
sens opposé. Pour maintenir l’équilibre, on
JG
place un second appui en D , milieu de AC , au-dessus de la règle. On note T C et
JG
T D , les forces supposées perpendiculaires à AB , exercées respectivement par les
appuis C et D sur la règle.
Exprimer les intensités TC et TD de ces forces en fonction des données du problème.
&KDSLWUH
26. Soit un solide dont on connaît J ΔG , le moment d’inertie par rapport à un axe Δ G
passant par son centre de masse G . Par rapport à un autre axe Δ , parallèle à Δ G , à
une distance d de Δ G , le théorème d’Huygens donne le moment d’inertie :
6929
5453
9
J Δ = J ΔG + md 2
07:1
Que peut-on déduire de ce résultat quant à la facilité de mise en rotation d’un solide
pour une direction d’axe de rotation donnée ?
582:
8891
2320
:160
.179
.65.2
27. Sur les figures ci-dessous les morceaux de tôle ont tous même masse (et donc la
même surface) ; les classer par ordre croissant de moment d’inertie par rapport à
l’axe tracé en pointillé (se souvenir que la contribution d’une masse est
proportionnelle au carré de la distance à l’axe).
P
ue e
t des
Micro
techn
iques
:211
0753
28. Le manège
Une personne P (de masse m avec la nacelle) tourne dans
une grande roue homogène de masse M , de rayon R , en
restant assise dans une nacelle du manège. La vitesse
R
ω
angulaire de rotation de la roue est ω .
P
•
a) Quels sont précisément la trajectoire et le mouvement de
la personne P ?
b) Quelle est l’accélération de P ? Comment varie-t-elle
entre les pieds et la tête de P ?
P
c) Sachant qu’il y a N personnes dans le manège, calculer
l’énergie cinétique totale en fonction de R , ω , m , M
et N (le moment d’inertie de la roue par rapport à son axe est MR 2 ).
/RLGXPRPHQWFLQpWLTXHORLGHO·pQHUJLHFLQpWLTXH
e Mé
caniq
29. Utiliser le théorème du moment cinétique pour établir l’équation différentielle du
mouvement d’un pendule simple dans un référentiel galiléen.
θ
θ0
θ
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
30. La masse du pendule simple de la question
précédente est soumise, en plus des forces déjà
décrites, à une force de frottement fluide modélisable
G
G
G
par F = −λ v où v est la vitesse dans le référentiel
terrestre. L’angle θ reste petit. Justifier la trajectoire
de phase obtenue ci-contre et décrire le mouvement.
Δ
.65.2
07:1
6929
5453
9
31. Le pendule pesant
Un solide de masse m mobile autour d’un axe horizontal
O
Δ = Oz ne passant pas par son centre de masse G , est tel
a
y
que OG = a . Son moment d’inertie par rapport à l’axe
θ G
Δ est J Δ et la liaison en O est parfaite.
z
a) Déterminer le moment du poids en O et appliquer la
loi du moment cinétique scalaire.
x
b) Utiliser l’énergie pour obtenir le même résultat.
c) En déduire la période T0 des oscillations de faibles amplitudes. Appliquer cette
relation au cas d’un pendule simple et retrouver l’expression de sa période.
d) En réalité pour des angles plus grands, la période T1 dépend de l’amplitude θ 0 et
:160
.179
est donnée par la formule de Borda : T1 = T0 (1 + θ 02 / 16) ; jusqu’à quel angle θ 0
l’écart entre les deux périodes ne dépasse-t-il pas 1% ?
e) Lire et interpréter les courbes θ ( t ) et les diagrammes de phase θ(θ ) où en trait
plein est représenté le pendule réel ( θ = − ω 2 sin θ ) et en pointillé l’approxi-
2320
0
mation harmonique des petits angles ( θ ≈ − ω 2θ ).
Micro
techn
iques
:211
0753
582:
8891
0
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
f) On lance le solide de sa position verticale θ ≈ π (centre de masse au-dessus de
l’axe) avec une vitesse initiale engendrant un mouvement révolutif autour de
l’axe. Lire et interpréter les courbes θ ( t ) et θ(θ ) correspondant.
&KDSLWUH
g) En réalité le mouvement du pendule est amorti ; commenter à nouveau les deux
courbes θ (t ) et θ(θ ) . Pour quelle raison n’y a-t-il ici que les courbes en trait
plein du pendule réel ( θ = − ω 2 sin θ sans amortissement) et non pas les courbes
0
582:
8891
2320
:160
.179
.65.2
07:1
6929
5453
9
en pointillé de l’approximation harmonique ( θ ≈ − ω02θ sans amortissement)
comme à la question e) ?
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0753
h) Le solide amorti est à présent lancé comme à la question f ) ; repérer sur la
courbe θ (t ) et le diagramme de phase θ(θ ) correspondant la bifurcation du
mouvement révolutif au mouvement pendulaire.
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
32. Un volant ayant la forme d’un cylindre homogène de rayon R = 50 cm , de masse
M = 200 kg , est mis en rotation autour de son axe par un moteur qui fournit une
puissance constante P = 2, 0 kW . Quelle durée minimale τ faut-il pour que le
volant, partant du repos, tourne à n = 2000 tours par minute ?
1
Pour le cylindre, le moment d’inertie par rapport à son axe est J Δ = MR 2 .
2
33. La machine d’Atwood
Deux masses m 1 et m 2 sont reliées par un fil passant sur
une poulie dont le moment d’inertie par rapport à son axe ⊕
Δ est J Δ ; il s’agit d’étudier le mouvement dans le champ
de pesanteur (l’axe z est suivant la verticale ascendante).
a) Examiner soigneusement les conséquences de chaque
terme de la phrase « le fil est sans masse, inextensible,
sans raideur et ne glisse pas sur la poulie ». Que peut-on m 2
déduire en plus si la poulie est « sans masse » ?
R
6929
5453
9
z
07:1
Δ
m1
2320
:160
.179
.65.2
Sans faire cette dernière hypothèse, déterminer « l’accélération » du système lâché
avec une vitesse initiale nulle :
b) En considérant séparément chacune des masses et la poulie, en introduisant les
tensions des fils et en appliquant les lois générales de la mécanique.
c) En considérant l’ensemble du système et en appliquant une méthode énergétique.
8891
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
0753
582:
34. Donner un exemple de solide en translation curviligne par rapport à un référentiel
( R) .
iques
:211
35. Comment caractériser le mouvement composé de la Terre autour du Soleil ? Celui
d’un ballon de rugby lors d’une transformation après un essai (tir au pied d’un
joueur entre les deux poteaux) ?
techn
36. Que fait un garagiste lorsqu’il réalise l’équilibrage des roues d’une voiture ?
Micro
37. « C’est le frottement avec le sol qui permet la marche d’une personne ». Expliquer
et donner d’autres exemples simples où la force de frottement (loin de s’opposer au
mouvement) permet une mise en mouvement.
ue e
t des
38. On souhaite montrer qu’il est possible de déterminer la masse d’une bouteille avec
une balance qui n’est pas « juste », ses bras de levier étant inégaux : l ≠ l ′ . Il faut
pour cela procéder à une double pesée, dite méthode de Gauss.
l′
ure d
l
m2′
e Mé
caniq
m1′
périe
Déterminer la masse m de la bouteille en fonction des masses m1′ et m2′ .
e Na
Écol
tiona
le Su
39. En patinage artistique, comment s’y prend le patineur qui fait « la toupie », pour
tourner de plus en plus vite sur lui-même ? Et l’élève sur le tabouret d’inertie ? D’où
provient l’augmentation d’énergie cinétique ?
&KDSLWUH
6929
5453
9
40. Un peu de sport…
Un athlète court le 100 m en environ 11 s. Quelle hauteur peut-il espérer franchir à
la perche ? Considérer le mouvement de son centre de masse (initialement à environ
1 m du sol). Choisir le système athlète + perche, faire une étude soigneuse de
l’énergie mécanique à chaque étape du saut.
Le record du monde est de 6,16 m, conclure.
ω
.179
moteur
O
.65.2
42. Un système tournant en forme de losange articulé
(liaisons parfaites) est tel que O est fixe, B coulisse
librement sur l’axe vertical, et aux extrémités A1 et
07:1
41. Quel est l’intérêt historique de la machine d’Atwood ?
A2
0753
582:
8891
2320
:160
sont disposées des masses (les boules)
θ
identiques. Si l’ensemble tourne à vitesse angulaire
A2
constante ω , cos θ est constant et proportionnel à
A1
g
B
, L est la longueur des tiges. Montrer
Lω 2
qualitativement en quoi ce dispositif appelé « régulateur à boules » permet de
stabiliser la vitesse de rotation du moteur qui l’entraîne autour de l’axe fixe OB .
:211
([HUFLFHV
•
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
43. Couple de rappel et position d’équilibre
A
Une masse ponctuelle m est placée à l’extrémité A d’une
z
tige de masse négligeable, de longueur l = OA , articulée en
un point fixe O et mobile dans un plan vertical. Un ressort
θ
G
spiral exerce sur cette tige un couple de rappel − Cθ où θ
g
l
désigne l’angle que fait la tige avec la verticale ascendante
Oz ( C est la constante de torsion). On désigne par g
l’intensité du champ de pesanteur.
O
a) Donner l’expression de l’énergie mécanique totale Em du
système sachant que l’énergie potentielle élastique du ressort spiral est
1
E ′p = Cθ 2 . Expliquer pourquoi et comment on peut en déduire l’équation du
2
mouvement.
Par quel autre moyen pouvait-on obtenir cette équation ?
b) En considérant θ comme petit, à quelle condition la position θ e = 0 correspondelle à un équilibre stable ? Cette condition étant supposée réalisée, calculer la
période T des petites oscillations.
c) Si cette condition n’est pas réalisée, montrer sans développement qu’il existe une
autre position d’équilibre ; commentaire qualitatif sur sa stabilité.
A
.65.2
07:1
6929
5453
9
44. D’où vient la différence ?
Une poulie d’axe horizontal, de rayon R , de moment d’inertie J Δ
par rapport à son axe, est mise en mouvement de deux manières :
1. en accrochant en A un corps de masse M
2. par un opérateur qui exerce en A une force verticale vers le bas
d’intensité F = Mg
Le fil ne glisse pas sur la poulie et les frottements au niveau de l’axe
sont négligés. Déterminer le rapport ω2 / ω1 des vitesses angulaires
prises par la poulie, initialement au repos, lorsque A a parcouru une hauteur h ;
pourquoi a-t-on ω2 / ω1 > 1 ?
:211
0753
582:
8891
2320
:160
.179
45. Intérêt d’un levier « pied de biche »
G
Un levier « pied de biche » est coudé à 90 ° au
R
B
A
point O ; afin d’arracher un clou en A , on
JG
G
G
R′
exerce en B une force F perpendiculaire à
F
OB et d’intensité F = 200 N .
Données : OB = 70 cm ; OA = 10 cm ; l’angle
α
entre OB et le plan d’appui est α = 30 ° .
JG
O
a) En déduire l’intensité de la force R normale
au plan et exercée par le levier sur le clou (le poids du levier est négligé) ;
commenter le résultat.
JJG
b) En déduire la réaction R′ du sol en O par ses composantes sur les axes ;
commenter le résultat.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
46. Le treuil
r2
Deux filins sont enroulés autour d’un treuil à deux
JG
r
1
cylindres de rayons r1 = 5, 0 cm et r2 = 8, 0 cm . L’un des
•
F
filins est attaché à une charge de masse m = 1, 0 kg que
JG
l’on souhaite soulever en exerçant sur l’autre une force F
comme indiqué sur la figure. Le moment d’inertie du treuil
par rapport à l’axe est J = 5, 0.10 −3 kg.m 2 . Au début, la
m
masse est posée au sol et sa vitesse est nulle. On prend
g = 10 m.s −2 .
a) Quelle est la norme minimale de la force pour que la masse se soulève ?
En réalité l’opérateur exerce une force d’intensité constante F = 8, 0 N .
b) Cette force serait-elle suffisante si l’opérateur tirait verticalement sur la masse
sans passer par le treuil ?
c) Quelle est l’énergie potentielle acquise par la masse lorsqu’elle a parcouru une
hauteur h = 1, 0 m ? Quel est le travail effectué par l’opérateur dans cette phase ?
Pourquoi ces grandeurs ne sont-elles pas égales ?
d) Quelle est la vitesse de la masse à la fin de cette phase ?
&KDSLWUH
.179
.65.2
07:1
6929
5453
9
47. La tige qui tombe (*)
y
B
Ox est un sol horizontal et Oy un mur vertical. Une tige
G
AB de masse m , de longueur 2l et de moment d’inertie
g
1
2
par rapport à l’axe Oz : J Δ = m ( 2l ) évolue dans le
3
α
plan de la figure. Initialement, elle est verticale et cet
O
équilibre (instable) est détruit de façon infinitésimale, ce
x
A
qui signifie que sa vitesse initiale est quasi nulle.
L’extrémité A peut tourner librement en O sans frottement.
a) Déterminer par une méthode au choix les expressions de α et α en fonction de
g , l et α .
b) Calculer, tant que A est en O , les composantes Rx et Ry de la force de contact
s’exerçant en A sur la tige ; commentaires.
:160
48. Barre oscillante
La barre homogène AB a une masse m et une longueur 2l.
Son moment d’inertie par rapport à l’axe Δ = ( A, z ) vaut
x
A
2320
O
Micro
techn
iques
:211
0753
582:
8891
1
2
J Δ = m ( 2l ) .
θ • G
3
Le point A est fixe, la barre est lâchée avec un angle θ 0 ,
y
B
avec une vitesse initiale nulle et la liaison en A est parfaite.
a) Quelle est la trajectoire de son centre d’inertie G ?
b) Calculer l’énergie cinétique et l’énergie mécanique de la barre (on peut choisir
une énergie potentielle nulle pour θ = π / 2 ).
c) Quelle est la vitesse linéaire vB de l’extrémité de la tige lorsque celle-ci passe par
la position verticale ?
d) Quelle est la période des petits mouvements de la barre ? Exprimer dans ce cas θ
en fonction du temps.
fil sans
torsion
C
D
e Mé
caniq
ue e
t des
49. Entraînement par frottement solide (*)
Un disque D pivote à l’intérieur d’un cadre C ; on
note J D et J C leur moment d’inertie par rapport à
l’axe Δ .
À t = 0 , C est au repos et D y tourne à la vitesse
angulaire ω 0 . Le frottement solide au niveau des
pivots se traduit par un moment constant de valeur
absolue Γ par rapport à l’axe Δ .
ure d
a) Quelle est la vitesse angulaire finale ω f du système
Δ
(C + D) ?
b) Calculer les variations d’énergies cinétiques ΔEc (C ) et ΔEc ( D) du cadre et du
périe
disque et en déduire celle ΔEc de l’ensemble ; quel est son signe ?
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
c) Calculer ωC et ωD en fonction du temps. Quel est le temps t f au bout duquel ω f
est atteinte ?
d) Faire un bilan énergétique et en déduire l’énergie W f transformée en chaleur par
frottement.
6929
5453
9
4XHVWLRQVRXYHUWHV
:160
.179
.65.2
07:1
50. Deux singes sur une corde
Deux singes S1 et S2 de même masse m sont accrochés à une corde sans masse et
inextensible qui passe dans la gorge d’une poulie d’axe horizontal et de moment
d’inertie négligeable, mobile sans frottement. Chaque singe est sur l’un des deux
brins de la corde, et initialement l’ensemble est immobile. Le singe S1 entreprend
alors de s’élever le long de son brin de corde, tandis que le singe S2 reste accroché
au sien. Que peut-on dire des mouvements des deux singes par rapport au sol ?
582:
8891
2320
51. Le hand spinner (*)
On fait tourner un hand spinner autour d’un axe vertical Oz en le maintenant entre
son pouce et son index. Lorsqu’on essaie de le faire tourner autour d’un axe
horizontal Ox en appliquant un couple avec le pouce et l’index, il « résiste » et tend
à pivoter autour d’un axe perpendiculaire Oy ; expliquer pourquoi.
x
iques
:211
0753
z
techn
O
Micro
y
caniq
ue e
t des
52. Un peu de marche
Un randonneur parcourt 5 km sur un terrain parfaitement plat. Au bout du chemin, il
ressent une certaine fatigue traduisant une dépense énergétique. Quelle énergie a-t-il
fournie et qu’est-elle devenue ?
périe
ure d
e Mé
53. Un plongeon qui se termine mal
Un plongeur, debout au bord du plongeoir de 10 m (au-dessus du niveau d’eau),
effectue un plongeon « passif » en se laissant basculer vers l’avant.
Comment arrive-t-il dans l’eau ?
Utiliser une modélisation simple et déterminer les données utiles.
e Na
Écol
tiona
le Su
Données : Le moment d’inertie d’une barre de masse m , longueur 2 a , par rapport
4
à un axe perpendiculaire à son extrémité est J Δ = m a 2 .
3
&KDSLWUH
6929
5453
9
5pSRQVHVDX[TXHVWLRQV
/HFRXUVG·DERUG
.65.2
07:1
/HVPRXYHPHQWVVLPSOHVG·XQVROLGH
.179
1. Un solide parfait est un système matériel indéformable ; la notion de milieu continu
indéformable est un modèle.
2320
:160
2. Un solide est en translation lorsque des axes rigidement liés au solide restent
parallèles à ceux de ( R ) . Tous les points du solide ont alors la même vitesse, celle
G
G
de G : ∀M , v ( M )( R ) = v (G )( R ) .
iques
:211
0753
582:
8891
Lorsque la trajectoire de G est une droite, alors la
translation du solide est rectiligne (mouvement d’un
N
•
ascenseur par exemple). Lorsque la trajectoire de G est
N
un cercle, alors la translation du solide est circulaire (la
nacelle N d’une grande roue par exemple). Plus
généralement, la trajectoire d’un point du solide en
N
translation (par exemple G ) donne son nom à la
N
translation : rectiligne, circulaire, elliptique, hélicoïdale…
La translation est uniforme lorsque la norme du vecteur vitesse est constante au
cours du temps (ni augmentation ni diminution de cette norme).
Δ
techn
3. Pour un solide en rotation autour d’un axe fixe Δ , si
l’on choisit O sur l’axe, alors sa vitesse est nulle :
G
G
v (O)( R ) = 0 . On utilise un système de coordonnées
Micro
ω
M
O
( R)
ure d
e Mé
caniq
G
uz
G
uθ
G
ur
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
Le mouvement de M est circulaire de centre H . Tous les points du solide ont des
vitesses différentes dans ( R ) .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
H
ue e
t des
cylindriques d’axe Δ = Oz . Si H est la projection
orthogonale de M sur Δ , alors :
JJJJG JJJG JJJJG
G
G
OM = OH + HM = z uz + r ur
Pour un point M quelconque du solide : r = cste et
θ = ω , en notant ω la vitesse angulaire du solide
autour de l’axe Δ , la vitesse du point M est
orthoradiale :
G
G
G
v ( M )( R ) = r θ uθ = rω uθ
S
0RPHQWFLQpWLTXHPRPHQWG·LQHUWLHSDUUDSSRUWjXQD[H
6929
5453
9
4. Pour un point matériel M , le moment cinétique en O dans ( R) est le moment de la
JJJJG
G
G
G
quantité de mouvement mv ( M )( R ) : σ O ( R ) = OM ∧ mv ( M )( R ) .
G G
G
Soit O un point de Δ dirigé par u z : σ Δ = σ O ⋅ u z
mr
r
JJJJG
JJJJG
G
G
Dans la base locale cylindrique : σ O = OM ∧ mv avec OM 0 et mv mrθ
mz
z
07:1
G
.65.2
σ 0 z = σ Δ = m r 2θ
8891
i
2320
5. Pour un ensemble de points, il suffit de sommer sur l’indice i :
JJJJG
G
G
σ O ( R ) = ¦ OM i ∧ m i v ( M i )( R )
:160
.179
Le moment cinétique scalaire σ Δ est d’autant plus grand que θ est grand, que le
point est massif et éloigné de l’axe. Il est indépendant du choix du point O sur Δ .
¦(
i
z
i
ri
i
i
i
θi
)
z
0753
O( R)
582:
S’agissant d’un solide en rotation autour d’un axe fixe, on reprend les notations de
la question 3. et de sa figure :
G
G
G
G
G
σ
=
(z u + r u ) ∧ m r ω u
( u et ω = θ sont communs à tous les points)
:211
G
G §
· G
et en développant le produit vectoriel : σ O ( R ) = −¦ m i zi riω ur i + ¨ ¦ m i ri2 ¸ ω u z
i
© i
¹
Micro
techn
iques
Le moment cinétique scalaire du solide S par rapport à l’axe de rotation Δ est la
G
G
projection de σ O ( R ) (O est un point de Δ ) sur le vecteur unitaire uz de Δ ; sachant
G
G
que tous les uri sont orthogonaux à uz , il reste :
G
G
σ Δ = σ O ( R ) . uz = 0 + ( ¦ m i ri2 )ω
i
σ Δ = J Δω
J Δ = ¦ m i ri2
avec
ue e
t des
On écrit
i
où ri = H i M i est la distance d’un point M i du solide à l’axe de rotation Δ .
ure d
e Mé
caniq
J Δ est le moment d’inertie du solide S par rapport à l’axe Δ ; il est toujours positif,
traduit la répartition de masse du solide autour de Δ et ne dépend pas du temps.
G
Rq : σ Δ et J Δ sont indépendants du point O , de l’axe, utilisé pour calculer σ O ( R ) .
périe
0RPHQWG·XQHIRUFHFRXSOHOLDLVRQFRQWDFW
e Na
Écol
tiona
le Su
6. L’action mécanique est modélisée par une force entièrement déterminée par son
JG
point d’application M et son vecteur F dont les caractéristiques sont la norme,
&KDSLWUH
parfois appelée intensité, (en newton), la direction et le sens. Sa droite d’action est la
JG
droite affine ( M , F ) .
.65.2
)
O
:160
.179
(
07:1
6929
5453
9
Exemples : La tension d’un fil qui tire sur un objet est une force qui est localisée au
point d’attache du fil ; le poids est une action répartie en volume, mais tout se passe
comme s’il était localisé au centre de masse G du corps.
JG
La force F étant appliquée en M , son moment par rapport au point O est le vecteur :
JJJG JJJJG JG
M O = OM ∧ F
JJJJG JJJJG JG G
Le moment au point M où elle s’applique est nul ( M M = MM ∧ F = 0 ).
JJJG
JJJJG G
M O est ⊥ au plan OM , F
JJJG
MO
2320
G
F
8891
M
H
(
JG
JJJG
nG
F sin OH , F
nG
,F) = 1
) avec ici sin (OH
JJJG
iques
JJJG
JJJG
M O = OH
:211
0753
582:
JJJG JJJJG JG
JJJG JJJJG
JG JJJG JG
JJJJG JG G
M O = OM ∧ F = (OH + HM ) ∧ F = OH ∧ F car HM ∧ F = 0
JJJG JJJG JG
M O = OH ∧ F
JJJG
G
M O est indépendant de la position de M sur la droite d’action de F
ure d
e Mé
caniq
ue e
t des
JJJG
G
7. Le moment par rapport à l’axe Δ est la projection de M O sur le vecteur unitaire uΔ
de Δ (O étant un point de Δ ) :
JJJG G
M Δ = M O ⋅ uΔ
JG
Le moment en O d’une force F s’appliquant en M est, en coordonnées
cylindriques d’axe Δ = Oz :
− z Fθ
Fr
r
JJJG JJJJG JG
M O = OM ∧ F = 0 ∧ Fθ = z Fr − r Fz
z
r Fθ
Fz
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
Le moment par rapport à l’axe Δ = Oz se réduit à M Δ = r Fθ
qui est bien le
produit de la seule composante orthoradiale de la force par la distance r du point
M à l’axe et qui n’est autre que le bras de levier.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
techn
En notant d la distance OH (distance du point O à la droite d’action de la force)
appelée « bras de levier » :
JJJG
JG
MO = d F
.179
.65.2
07:1
6929
5453
9
Il est souvent plus simple
Δ
d’appliquer cette méthode
que de calculer un produit
JJG
vectoriel.
M Oz
Attention : le moment par
rapport à un axe est une
G
O
Fθ
r
grandeur algébrique ; pour
G
avoir le signe du moment par
F
rapport à l’axe Δ orienté, il
M
suffit de regarder dans quel
JG
sens la force F a tendance à faire tourner le corps autour du point O . Sur la figure
ci-dessus, ce sens est indiqué par la flèche : le tire-bouchon tournant dans ce sens
avance alors dans le sens orienté de Δ , le moment est donc ici positif (ceci revient à
trouver le sens du produit vectoriel).
i
2320
:160
JJG
8. Fi est la somme des forces sur chaque point M i . La résultante sur l’ensemble est
JG
JJG
JJJG
JJJJJG JJG
F = ¦ Fi et le moment résultant au point O : M O = ¦ OM i ∧ Fi .
i
8891
Pour un système de deux points matériels, par exemple, les forces subies par M 1
:211
0753
582:
peuvent être dues à M 2 , force intérieure, ou à des points extérieurs au système,
forces extérieures. En distinguant l’origine des forces, on aura pour l’ensemble :
JG JJJG JJJG
F = Fint + Fext
JJJG
JJJG
En notant F12 la force (intérieure) exercée par M 1 sur M 2 et F21 la force
iques
(intérieure) exercée par M 2 sur M 1 : on aura
JJJG
JJJG
F21 = − F12 (principe des actions réciproques) et les
JJJG
F12
M2
Micro
techn
forces portées par M 1M 2 (points matériels). Ce que
JJJG
M1
F21
l’on peut représenter pour des forces attractives sur le
schéma ci-contre.
JJJG JJJG JJJG G
Il vient Fint = F12 + F21 = 0 et en O quelconque :
JJJJG
JJJJJG JJJG JJJJJG JJJG
JJJJJG JJJJJG
JJJG JJJJJJJG JJJG G
M O , int = OM 1 ∧ F21 + OM 2 ∧ F12 = OM 2 − OM 1 ∧ F12 = M 1M 2 ∧ F12 = 0 .
)
ue e
t des
(
caniq
Soit, pour un système quelconque de points (en regroupant les points deux à deux) :
JJJG G
JJJJG
G
Fint = 0 et M O , int = 0
e Mé
On admet la généralisation à un solide :
Pour un solide la résultante et le moment résultant des actions intérieures sont nuls
e Na
Écol
tiona
le Su
périe
ure d
Attention ceci ne signifie pas que les forces intérieures ne jouent aucun rôle. Leur
travail peut être non nul, notamment pour les systèmes déformables, et elles
interviennent alors dans le théorème de l’énergie cinétique.
Pour un solide (système indéformable) le travail des forces intérieures est nul.
&KDSLWUH
JG
G
α
JJG
F2
.179
JJJJJJG JG
F sin α = F d
M = M 1M 2
M2
:160
JJG
07:1
JG
Résultante :
F = F1 + F 2 = 0
JJG
JJJJG JG
JJJJG JG
d
JJG
Moment en O : M O = OM 1 ∧ F 1 + OM 2 ∧ F 2
JG
JG
F1
et avec F 1 = − F 2
JJG
JJJJG JJJJG
JG JJJJJJG JG
M1
M O = (− OM 1 + OM 2 ) ∧ F 2 = M 1M 2 ∧ F 2
Le moment du couple est indépendant du point O où on le calcule.
.65.2
JG
6929
5453
9
9. Un couple est une action mécanique dont la résultante est nulle et le moment
résultant non nul.
M2
Un couple peut être modélisé par deux forces opposées
JJG
ne s’appliquant pas au même point et ayant des droites
F1
JJG
F2
d’action différentes. Ceci est d’ailleurs à l’origine de la
M1
dénomination « couple de forces »
2320
JJG
JJG
En notant F la norme commune F1 = F2
582:
8891
En physique, le moment du couple (inutile de préciser le point où on le calcule,
JG
donc) est souvent noté Γ .
0753
L’action d’un couple est d’essayer de faire tourner le système sans déplacer son
centre d’inertie.
:211
Exemples de couples :
iques
* Action d’un tournevis sur une vis.
techn
* Action de la main sur un couvercle de bocal (ou un bouchon à vis), la force est
dans ce cas répartie sur tout le tour du couvercle.
caniq
10. Une liaison pivot (la plus rencontrée dans les systèmes
mécaniques) est un mécanisme ne permettant à un solide
que des mouvements de rotation autour d’un axe.
bâti
axe rotation
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
e Mé
Exemples : la liaison entre une porte et les gonds
permettant une rotation suivant un axe vertical, ou celle
du hayon d’une voiture suivant un axe horizontal. On
peut citer l’entraînement par manivelle d’un cylindre de
boîte à musique, la pédale d’une bicyclette liée à son
maneton par des roulements, ou dans de nombreux cas
beaucoup de pièces tournantes dans un moteur ou une
machine.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
* Un moteur exerce un couple sur l’axe des roues d’un véhicule afin de les faire
tourner ; si ces roues sont en contact avec frottement avec un support, leur
mouvement de rotation se transforme en mouvement de translation et fait avancer le
véhicule (la force de frottement du support sur les roues est alors motrice).
Rq : Ne pas confondre avec une liaison rotule permettant plus de liberté comme
celle du levier de commande d’une boîte de vitesse ou d’une manette de jeu
vidéo…
6929
5453
9
La liaison pivot empêche toute rotation autour d’axes perpendiculaires à Δ . Si le
solide étudié subit des forces de moment perpendiculaire à Δ , la liaison pivot
supporte l’effort de liaison avec un moment opposé de la force de réaction.
07:1
Le mouvement ne pouvant être qu’une rotation autour de Δ , on décrit l’action de la
liaison pivot sur le solide par le moment par rapport à Δ des actions de contact noté
MΔ .
.65.2
Une liaison pivot est parfaite lorsque M Δ = 0 (absence de frottements).
En présence de frottements fluide, on peut utiliser le modèle M Δ = −h θ = − h ω .
.179
En présence de frottements solide, M Δ = cste < 0 .
2320
:160
Si le bâti exerce un couple moteur sur le solide, M Δ > 0 .
On peut aussi dire que la liaison est parfaite si et seulement si elle ne travaille pas.
582:
8891
Rq : Les actions de contact peuvent avoir un moment perpendiculaire à l’axe de
rotation comme dans la rotation rapide d’une pièce tournante dont le centre de
masse n’est pas sur l’axe ; cela conduit alors à des usures prématurées au
niveau des liaisons d’axe, voire à la déformation de l’axe de rotation.
iques
:211
0753
G
11. La réaction normale Rn est toujours dirigée du support vers le solide. Le contact est
G
rompu lorsque Rn s’annule (cas d’une liaison unilatérale).
techn
/RLGXFHQWUHGHPDVVHHWORLGXPRPHQWFLQpWLTXH
ue e
t des
Micro
12. Le théorème du centre de masse (ou de la résultante cinétique) pour un système
fermé quelconque de masse m et de centre de masse G dans un référentiel galiléen
( R ) s’écrit :
JG
G
m a (G )( R ) = ¦ F ext
JG
¦F
est la somme (ou résultante) des forces extérieures au système (actions
exercées par des points ou des objets situés en dehors du système). En effet pour un
G
G
système de points ¦ Fint = 0 , ; voir question 8.
e Mé
caniq
ext
périe
ure d
Le théorème de la résultante cinétique fournit donc le mouvement du centre de
JG
masse du système (ceci s’applique évidemment à un solide avec ¦ F ext résultante
des forces extérieures sur le solide).
e Na
Écol
tiona
le Su
13. Le théorème du moment cinétique au point O fixe dans ( R ) galiléen (ce qui signifie
que les vitesses intervenant dans le moment cinétique sont évaluées dans ce
référentiel galiléen) s’écrit :
&KDSLWUH
G
JJJG
§ dσ O ( R ) ·
¨ dt ¸ = ¦ M O , ext
©
¹( R )
6929
5453
9
où le second membre représente la somme des moments en O des forces extérieures
s’exerçant sur le système. En effet pour un système de points le moment résultant
des forces intérieures est nul (question 8.).
.179
.65.2
07:1
La richesse du théorème du moment cinétique réside dans le libre choix du point O
fixe ; choisir un point O où s’applique une force inconnue permet d’éliminer cette
force puisque son moment en O est nul.
JJJJG
Pour un solide le théorème s’applique avec ¦ M O , ext moment résultant des actions
extérieures. La résultante et le moment résultant des actions intérieures sont nuls.
et avec σ Δ = J Δω ,
JΔ
dω
Δ
= ¦ M ext
dt
582:
dσ Δ
Δ
= ¦ M ext
dt
8891
2320
:160
Pour un solide en rotation autour d’un axe Δ fixe dans ( R ) , passant par O et de
G
G
G
G
vecteur unitaire uΔ , la projection du théorème précédent sur uΔ avec σ Δ = σ O ( R ) . uΔ
JJJJG G
Δ
= M O , ext . uΔ , le moment des forces
le moment cinétique par rapport à l’axe Δ et M ext
extérieures par rapport à l’axe Δ , il vient :
:211
0753
C’est cette relation qui est utile en pratique pour un mouvement de rotation autour
d’un axe fixe.
On peut l’écrire directement si on précise :
techn
iques
– le système solide choisi et le référentiel
– son mouvement (rotation autour de l’axe fixe Δ)
– la loi physique : projection du théorème du moment cinétique sur l’axe Δ.
caniq
Exemples : le patineur sur glace à la question 39., le cadre et le disque de la question
49.,…
e Mé
eQHUJLHFLQpWLTXHHWORLGHO·pQHUJLHFLQpWLTXH
ure d
15. L’énergie cinétique d’un point matériel est Ec( R ) =
1 G2
m v ( M )( R ) .
2
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
1 G
Celle d’un système de point se calcule par sommation Ec( R ) = ¦ m i vi2 ( M i )( R ) .
i 2
– dans le cas d’un solide en translation, tous les points ont même vitesse, celle de
G :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
14. Lorsque la somme des moments des forces extérieures par rapport à l’axe est nulle,
dσ Δ
Δ
= ¦ M ext
= 0 et le moment cinétique se conserve : σ Δ = cste .
alors
dt
Attention, cela ne signifie pas qu’il n’y a pas de forces, mais simplement que la
somme de leurs moments par rapport à l’axe est nulle.
Ec( R ) =
1 G2
m v (G ) ( R )
2
comme en mécanique du point matériel.
6929
5453
9
– dans le cas d’un solide en rotation autour d’un axe fixe Δ , vi = riω avec
ri = H i M i , distance de M i à Δ :
1
( ¦ m i ri2 )ω 2 soit
2 i
Ec( R ) =
1
J Δω 2
2
07:1
Ec( R ) =
.179
.65.2
montrant que le moment d’inertie est à la masse ce que la vitesse angulaire est à la
vitesse de translation.
2320
:160
16. Le théorème de la puissance cinétique s’énonce pour un système fermé, déformable
ou non :
dEc( R )
= Pint + ¦ P( R )ext
dt
ΔEc( R ) = Wint + ¦Wext ( R )
ou plus couramment
582:
Ec2( R ) − Ec1( R ) = W1→2( R )
8891
Le théorème de l’énergie cinétique entre deux situations :
:211
0753
affirme que la variation d’énergie cinétique d’un système entre deux instants dans
( R) est égale à la somme des travaux dans ( R) des actions intérieures et des actions
extérieures appliquées au système entre ces deux instants.
ue e
t des
Micro
techn
iques
Dans les théorèmes de la résultante dynamique et du moment cinétique n’interviennent que les actions extérieures (les actions intérieures s’éliminent). En
revanche, le théorème de l’énergie cinétique fait intervenir aussi bien le travail des
actions extérieures que le travail des actions intérieures. Les forces intérieures
peuvent en effet travailler si le système est déformable (comme pour le patineur
question 39., le perchiste question 40. ou le cadre et le disque question 49.). Ce
travail des actions intérieures est indépendant du référentiel ( R ) .
caniq
De plus les théorèmes généraux font intervenir des dérivées d’ordre 2 par rapport au
temps, alors que le théorème de l’énergie cinétique ne fait intervenir que des
dérivées d’ordre 1 (d’où le nom d’intégrale première, donné à ce type de loi).
e Mé
17. La puissance d’une force dans ( R ) est définie comme en mécanique du point :
JG G
P( R ) = F .v ( M )( R )
périe
ure d
Dans le cas d’un solide en rotation autour d’un axe Δ = Oz , le produit scalaire
s’effectue en coordonnées cylindriques :
G
G
G
G
P( R ) = ( Fr ur + Fθ uθ + Fz uz ). rω uθ = Fθ rω
e Na
Écol
tiona
le Su
On y reconnaît le moment de la force par rapport à Δ évalué à la question 7. :
M Δ = r Fθ
&KDSLWUH
d’où l’expression : P( R ) = M Δ . ω
6929
5453
9
Une action a une puissance nulle si son moment par rapport à l’axe est nul (ou en
l’absence de rotation). On en déduit que la puissance d’une force passant par l’axe
ou parallèle à l’axe est nulle comme son moment !
.65.2
07:1
18. Dans le cas particulier d’un solide unique, en l’absence de déformation, le travail
des actions intérieures est nul ; il en est de même de la puissance des actions
intérieures.
dEc( R )
Alors il reste : ΔEc( R ) = ¦Wext( R ) ou
= ¦ P( R )ext
dt
:160
8891
dω
Δ
= ¦ M ext
dt
582:
JΔ
2320
la loi de la puissance cinétique s’écrit :
dEc( R )
dω
Δ
= J Δω
= ¦ P( R )ext = ¦ M ext
.ω
dt
dt
Après simplification par ω , il reste
1
J Δω 2 et alors
2
.179
Dans le cas d’un solide en rotation autour d’un axe fixe Δ , Ec( R ) =
0753
soit exactement la loi du moment cinétique de la question 13.
iques
:211
$SSOLFDWLRQVGLUHFWHVGXFRXUV
techn
0RXYHPHQWHWFHQWUHGHPDVVH
19. Dans une translation rectiligne (uniforme ou non uniforme), le vecteur vitesse garde
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
une direction fixe tout au long du mouvement. Lorsque la translation rectiligne est
uniforme, alors en plus la norme du vecteur vitesse est constante (ex : un TGV qui
circule en ligne droite à vitesse constante). La translation rectiligne est non uniforme
lorsque la norme du vecteur vitesse change, le
yroue
ω
mouvement rectiligne est alors accéléré ou
décéléré (ex : un ascenseur au début ou à la fin de
sa course).
xroue
N
•
20. Fixons rigidement un axe au solide et donc qui
N
Δ
l’accompagne dans son mouvement. Si cet axe
y( R )
tourne par rapport aux axes du référentiel d’étude
( R ) , alors il s’agit d’une rotation comme la grande
ynacelle
N
roue en rotation autour de l’axe fixe horizontal Δ .
N
xnacelle
Si, en revanche, cet axe garde une direction fixe
x
( R)
par rapport aux axes du référentiel d’étude ( R ) ,
alors le solide est en translation, cette translation est circulaire dans le cas des
nacelles accrochées à la grande roue.
G
⊕
07:1
Δ
.65.2
Δ
G
6929
5453
9
21. On représente la position du doigt par Δ .
Sur le schéma de gauche, le moment du poids est positif par rapport à Δ d’où un
basculement dans le sens positif indiqué ; G est décalé par rapport à la position du
doigt.
Sur le schéma de droite, le moment du poids est nul par rapport à Δ , le club est
donc en équilibre ; la position de G se trouve exactement au-dessus du doigt.
.179
22. Équilibrage d’une girouette
La formation du barycentre est associative ; si G 1 est le
a
:160
barycentre de la plaque de masse M , G 2 celui de la
8891
O
d
•
ω
l
0753
C
582:
2320
masse m , alors le barycentre G de l’ensemble est donné
par :
JJJJJG
JJJJJG
JJJJG
M O′G1 + m O′G 2 = ( M + m)O′G
où O′ est un point quelconque ; et en particulier si l’on
prend O′ en G , alors :
JJJJG
JJJJG G
M GG 1 + m GG 2 = 0
Par projection sur l’axe horizontal G 1G 2 :
iques
:211
M
§ a·
a
M ¨ − ¸ + m d = 0 soit d =
2m
© 2¹
Micro
techn
Rq 1 : Cet équilibrage statique fait que si l’axe est à présent horizontal, alors
n’importe quelle position de rotation de l’ensemble plaque + masse est
position d’équilibre. Sans cet équilibrage, on peut montrer que les réactions
en O et C sont alors en ω 2 , ce qui conduit à des usures importantes.
ue e
t des
Rq 2 : La hauteur de la tige comportant la masse n’a pas été choisie par hasard en
l + a / 2 ; en réalité c’est la seule valeur, certes intuitive, qui permet que le
moment cinétique en O du système soit colinéaire à l’axe : on peut montrer
que cet équilibrage dynamique évite qu’avec la rotation l’axe ne se torde.
caniq
)RUFHPRPHQWGHIRUFHPRPHQWG·LQHUWLHHWpQHUJLHFLQpWLTXH
périe
ure d
e Mé
JJJJG JG
23. L’unité d’un moment de force est le m.N (penser à OM ∧ F ), à ne pas confondre
JG G
avec l’unité d’énergie, le N.m (penser à F . d r ), et qui seul est appelé joule
(symbole J). En pratique les moments sont exprimés en N.m et les travaux des
forces en J.
e Na
Écol
tiona
le Su
24. Situation 1 : lorsque la droite d’action de la force est perpendiculaire à l’axe de
rotation Δ , alors le moment de la force par rapport à l’axe est nul : M Δ = 0 (le bras
de levier est nul).
&KDSLWUH
6929
5453
9
Situation 2 : lorsque la droite d’action de la force est parallèle à l’axe de rotation Δ ,
alors le moment de la force par rapport à l’axe est également nul : M Δ = 0 (le
JJG
moment M O est alors non nul mais orthogonal à l’axe et donc sa projection sur
l’axe est nulle).
Il faut toujours se rappeler que c’est le moment d’une force par rapport à un axe qui
permet de faire tourner un solide autour de cet axe. S’agissant d’une porte
entrouverte et que l’on souhaite ouvrir davantage par exemple par rotation autour de
l’axe passant par ses gonds, il y a deux actions inefficaces :
.65.2
07:1
– tirer sur la poignée vers l’extérieur de la porte (situation 1)
– pousser sur la poignée vers le haut (situation 2)
2320
:160
.179
25. Pour éliminer TC , écrivons d’abord le théorème des moments par rapport à un axe
JJG
Δ C perpendiculaire au plan de la figure et JJG
⊕
TC
F
A
passant par C ; compte tenu de l’orientation
D
positive :
C
B
l
l
l
FB + FA − TD = 0 TD = 2( FA + FB )
A
2
2
4
G
JJG
FB
0753
582:
8891
JJG mg
De même par rapport à un axe Δ D passant par
TD
D :
l
l
l
3l
FA − TC + mg + FB = 0 TC = FA + 3FB + mg
4
4
4
4
Micro
techn
iques
:211
Avec le théorème du centre de masse ; la résultante des forces, nulle à l’équilibre,
JG JG JG JG JG
G
est : R = F A + F B + T C + T D + mg
et en projection sur la verticale ascendante, avec les valeurs trouvées :
JG G
R = FA − FB + ( FA + 3FB + mg ) − 2( FA + FB ) + mg = 0 d’où le résultat attendu R = 0
Il est donc possible de changer de méthode puisque seuls 2 des 3 résultats sont
nécessaires.
e Mé
caniq
27. Le bon classement est celui de gauche à droite sur les figures de l’énoncé. Le
classement entre la 1ère et la 3e est facile ; quant à la 2e, la contribution d’une masse
étant proportionnelle au carré de la distance à l’axe, l’excédent lié à la large base du
triangle est plus important que la diminution liée à l’étroitesse du sommet.
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
28. Le manège
a) La nacelle et la personne P sont en translation circulaire dans le référentiel
terrestre. Tous les points de P ont des trajectoires circulaires de même rayon R
et de centres différents.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
26. Pour une direction donnée, ce résultat montre que le moment d’inertie est minimal si
l’axe passe par le centre d’inertie ; c’est donc autour de cet axe passant par G que la
rotation du solide est la plus facile à mettre en œuvre.
b) L’accélération est celle d’un mouvement circulaire uniforme pour chaque point
de P ; elle est normale, centripète (dirigée vers les centres respectifs) et de
G
G
norme ω 2 R , soit a ( P ) = − ω 2 R ur . Elle ne varie donc pas entre les pieds et la tête.
.179
.65.2
07:1
6929
5453
9
c) Pour les personnes : elles sont en translation, et tous les corps ont même vitesse
1
1
v = Rω , d’où EC1 = N mv 2 = NmR 2ω 2
2
2
Pour la roue : elle est en rotation, de moment d’inertie par rapport à son axe Δ
1
1
égal à J Δ = MR 2 , d’où EC 2 = J Δω 2 = MR 2ω 2
2
2
1
2 2
L’énergie cinétique totale est EC = EC1 + EC 2 soit EC = ( Nm + M ) R ω
2
:211
θ
G
T
θ
582:
0753
G
30. Pour θ petit et avec la force de frottement −λ l θ u , l’équation
: Ox
O
8891
2320
29. Il est possible d’écrire le théorème du moment cinétique par
G
G
G
G
rapport au point O ; sachant que σ O = r ∧ mv = ml 2θ u x (à
JG
évaluer en coordonnées polaires), que le moment de T par
JG
rapport à O est nul (la droite d’action de T passe par O) et que
celui du poids est un moment de rappel à bras de levier l sin θ ,
on a ml 2θ = − mgl sin θ , soit l’équation différentielle cherchée.
:160
/RLGXPRPHQWFLQpWLTXHORLGHO·pQHUJLHFLQpWLTXH
G
uθ
•
G
mg
z
G
ur
ue e
t des
Micro
techn
iques
λ
g
différentielle devient θ + θ + θ = 0 et normalisée :
m
l
θ + 2α θ + ω 02 θ = 0
On n’a plus un oscillateur harmonique dont la trajectoire de phase serait une ellipse.
Le changement de signe de θ et la diminution de « l’amplitude » des oscillations
indiquent un régime pseudopériodique. Le point O attracteur de la trajectoire de
phase montre une diminution de l’énergie du fait du travail de la force de frottement,
les vitesses au passage par la verticale ( θ = 0 ) sont de plus en plus petites.
JG
R
caniq
31. Le pendule pesant
a) Le moment du poids en O est par définition :
a cos θ mg
0
JJJG
G
OG ∧ mg = a sin θ ∧ 0 =
0
− mga sin θ
0
0
Cette méthode de calcul « rassurante » n’est pas la
plus physique ; en effet ce résultat peut être trouvé
directement puisqu’il s’interprète comme le produit
de la force mg par le bras de levier OB = a sin θ
(distance de la droite d’action de la force à l’axe de
rotation Δ ), le poids ayant tendance à faire tourner
B
e Na
Écol
tiona
le Su
périe
ure d
e Mé
O
y
θ
z
x
G
G
mg
&KDSLWUH
6929
5453
9
G
le solide suivant − u z (si θ est positif).
Les forces sont le poids et la réaction de l’axe de moment nul sur Δ (liaison
parfaite). Attention direction et norme de la réaction sont inconnues a priori, on
sait seulement que M Δ = 0 .
La loi du moment cinétique scalaire s’écrit alors :
J Δθ = − mga sin θ (1)
.65.2
07:1
b) Le poids (force conservative) est la seule force extérieure qui travaille (la réaction
JG
d’axe R s’applique au point O de vitesse nulle et la liaison est parfaite) ; par
ailleurs, le système est un solide, le travail des forces intérieures est nul, on peut
donc écrire la conservation de son énergie mécanique :
L’énergie potentielle de pesanteur est : E p = − mg x = − mga cos θ
.179
1 2
J Δθ − mga cos θ (2)
2
avec E = 0 − mga cos θ 0 si le pendule est lâché avec une vitesse initiale nulle à
:160
E = Ec + E p =
0753
582:
8891
2320
partir de θ = θ 0 .
Ces deux relations sont « identiques » (voir la question 18.), puisque en dérivant
(2) (ce qui revient à écrire la loi de la puissance cinétique) on retrouve (1) ;
rappelons que pour intégrer (1), il faut d’abord multiplier les deux membres par
θ et ne pas omettre la constante d’intégration. La relation (2) est une intégrale
première du mouvement (elle fait apparaître θ et non plus θ ), d’où son intérêt.
2π
JΔ
mga
= 2π
ω0
Micro
T0 =
techn
iques
:211
c) Pour des oscillations de faibles amplitudes, sin θ ≈ θ et (1) s’écrit :
mga
θ = −
θ = − ω 20 θ
JΔ
La linéarisation redonne l’équation différentielle d’un oscillateur harmonique,
d’où des oscillations sinusoïdales de période :
l
g
ure d
T0 = 2π
e Mé
caniq
Un pendule simple est constitué d’une masse m quasi ponctuelle à l’extrémité
d’une tige (ou d’un fil) de masse négligeable, de longueur l ; a = OG = l et
J Δ = ml 2 , d’où l’expression classique de la période :
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
d) Dans la formule de Borda T1 = T0 (1 + θ02 / 16) , il apparaît en réalité que la période
(le temps d’un aller-retour) est d’autant plus grande que l’amplitude d’oscillation
est grande, ce qui est intuitif (c’est le non isochronisme des oscillations).
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Cette période est bien sûr indépendante de l’amplitude θ0 (isochronisme des
petites oscillations).
TT11 −−TT00 θθ0202
2323
° ,° ,
==
n’excède
n’excède pas
pas0,01
0,01pour
pourun
unangle
angleinférieur
inférieurà àθθ
0 0==
TT00
16
16
ce qui est une
une valeur
valeur assez
assez importante.
importante.
L’écart relatif
relatif
:160
.179
.65.2
07:1
6929
5453
9
e) Courbe θ ((tt)) :: la
la période
période est
est de
de l’ordre
l’ordre de
de 0,8
0,8ss etet l’angle
l’angle maximal
maximal dede
rad soit
θ m = 0,8 rad
soit 45°
45° ;; cet
cet angle
angle est
est très
très supérieur
supérieur aux
aux 23°
23° dedelalaquestion
question
précédente,
précédente, condition
condition nécessaire
nécessaire pour
pour bien
bien distinguer
distinguer lelependule
penduleréel
réel(en
(entrait
trait
plein) de l’approximation
l’approximation harmonique
harmonique(en
(enpointillé),
pointillé),on
onvoit
voitbien
bienque
queTT>>T0T0(non
(non
isochronisme)
isochronisme) et
et que
que l’écart
l’écart entre
entreles
lesdeux
deuxcourbes
courbess’accentue
s’accentueavec
avecleletemps.
temps.
Courbe θ ((θθ)) :: le
le diagramme
diagramme de
dephase
phaseest
estune
unecourbe
courbefermée
ferméecar
carθθ( t()t )etetθθ(t()t )sont
sont
périodiques
périodiques de
de même
même période.
période. Bien
Bien sûr
sûrlalavitesse
vitesseest
estnulle
nulleaux
auxextrémités
extrémitéslorsque
lorsque
θ = θ mm et extrémale
extrémale (c’est
(c’est une
une grandeur
grandeur algébrique)
algébrique)au
aupassage
passagepar
parlalaverticale
verticale
θ = 0 ; néanmoins
néanmoins la
la vitesse
vitesse est
est un
un peu
peu plus
plusfaible
faiblepour
pourlelependule
penduleréel
réel(et
(etc’est
c’est
bien parce
parce que
que sa
sa vitesse
vitesse est
estmoindre
moindreque
quesa
sapériode
périodeest
estplus
plusgrande).
grande).
0753
582:
8891
2320
f) Courbe θ ((tt)) :: ilil n’y
n’y aa plus
plus d’oscillations
d’oscillationsmais
maisun
unmouvement
mouvementcirculaire
circulairededeGGnon
non
uniforme et
et θθ((tt)) est
est une
une fonction
fonction croissante
croissante (bien
(biensûr
sûrseul
seullelependule
penduleréel
réelest
est
représenté).
représenté).
Courbe θ((θθ)) :: la
la vitesse
vitesse est
est maximale
maximale pour
pour 22ππ, , 44ππ,…lorsque
,…lorsquelelependule
pendulepasse
passe
par la position
position verticale
verticale basse,
basse, etetminimale
minimalepour
pourππ, ,33ππ, ,5π
5π,…
,…lorsque
lorsquelelependule
pendule
passe par la
la position
position verticale
verticale haute
haute;; lala solution
solution bien
bienque
quepériodique
périodiquen’est
n’estpas
pas
sinusoïdale.
sinusoïdale.
Micro
techn
iques
:211
g) Courbe θ ((tt)) :: le
le pendule
pendule est
est lâché
lâchéde
de θθ00≈≈ππ avec
avecune
unevitesse
vitesseinitiale
initialenulle
nulle; pour
; pour
n’estbien
biensûr
sûr
un angle aussi
aussi important,
important, l’approximation
l’approximation harmonique
harmonique sin
sinθθ≈≈θθ n’est
pas valable
valable d’où
d’où les
les seules
seules courbes
courbes en
en trait
trait plein.
plein. Le
Le régime
régime est
est pseudopseudopériodique
périodique amorti.
amorti.
Courbe θ ((θθ)) :: les
les oscillations
oscillations en
en amplitudes
amplitudesetetvitesses
vitessesamorties
amortiesconduisent
conduisentà àdes
des
courbes qui
qui s’enroulent
s’enroulent en
en forme
forme de
despirale
spiralepour
pourconverger
convergerenenθθ==00etetθθ==0 0; ;lala
vitesse reste
reste nulle
nulle pour
pour des
des élongations
élongations extrémales,
extrémales,mais
maisn’est
n’estplus
plusextrémale
extrémaleauau
passage par
par la
la verticale.
verticale.
périe
ure d
e Mé
caniq
ue e
t des
h) Courbe θ ((tt)) :: le
le pendule
pendule est
est lancé
lancéàà θθ00≈≈ππ avec
avecune
unevitesse
vitesseinitiale
initialeimportante
importante; ;
preuvequ’il
qu’ila afait
faitpresque
presque
l’angle augmente
augmente régulièrement
régulièrement jusqu’à
jusqu’à environ
environ 55ππ preuve
deux tours
tours complets
complets sur
sur lui-même
lui-même (mouvement
(mouvement révolutif).
révolutif).Mais
Maiscomme
commeililest
est
amorti, à partir
partir de
de cette
cette valeur,
valeur, lele mouvement
mouvement devient
devientpendulaire
pendulairepour
pourosciller
osciller
autour de 44ππ (là
(là aussi,
aussi, bien
bien sûr,
sûr,seul
seullelependule
penduleréel
réelest
estreprésenté).
représenté).
Courbe θ((θθ)) :: la
la vitesse
vitesse s’annule
s’annule pour
pourlalapremière
premièrefois
foisvers
vers5π5π avant
avantdedechanger
changer
de signe au
au moment
moment même
même où
où lele pendule
pendule amorce
amorce un
un changement
changement dedesens
sens; ;
l’enroulement
l’enroulement vers
vers θθ == 44ππ etet θθ ==00 est
est ensuite
ensuite similaire
similaireààcelui
celuidedelalaquestion
question
précédente.
précédente.
e Na
Écol
tiona
le Su
32. La durée minimale
minimale est
est obtenue
obtenue en
en négligeant
négligeant les
les frottements
frottements; ;lalaloi
loidedel’énergie
l’énergie
cinétique appliquée
appliquée au
au cylindre
cylindreentre
entre tt==00 etet t t==ττ s’écrit
s’écritalors
alors: :
&KDSLWUH
&KDSLWUH
6929
5453
9
1
J Δω 2 − 0 = Wmoteur = P τ car la puissance est constante
2
MR 2π 2 n 2
d’où avec ω = 2π n : τ =
; AN : τ = 274 s ≈ 4,5 min , τ est assez grand
P
car la masse est importante et la vitesse voulue grande.
582:
0753
:211
Th de la résultante dynamique pour m1 sur l’axe z :
m1
z1 = − m1 g + T1 (2)
R
z
Δ
8891
2320
b) 1ère méthode : On considère séparément chaque masse ⊕
et la poulie, ce qui nécessite d’introduire la tension du fil
et on applique les théorèmes de la mécanique dans le
JG
référentiel galiléen du laboratoire.
T2
Th de la résultante dynamique pour m2 sur l’axe z :
m2 z2 = − m2 g + T2 (1)
:160
.179
.65.2
07:1
33. La machine d’Atwood
a) Le long d’un fil sans masse, la tension est uniforme sur un brin vertical
(conséquence du théorème de la résultante dynamique appliqué à un élément de
fil) ; un fil inextensible conserve sa longueur et n’a pas d’énergie potentielle
élastique ; un fil sans raideur est très souple et garde la forme qu’on lui donne ;
l’absence de glissement sur la poulie permet de corréler la translation des masses
à la rotation de la poulie.
Si la poulie est « sans masse », donc à moment d’inertie négligeable, la tension
du fil de part et d’autre est la même (conséquence de la loi du moment cinétique
scalaire appliquée à la poulie).
G
m2 g
JG
T1
G
m1 g
iques
zi ≠ 0 , on a Ti ≠ mi g ; la tension du fil n’est
Rq : À noter qu’en mouvement, soit pas égale, en norme, au poids de la masse accrochée !
caniq
Rq : À noter que T1 ≠ T2 en mouvement, sauf si J Δ négligeable.
e Mé
L’absence de glissement du fil inextensible sur la poulie donne :
z1 = − z2 = Rω (4) et (5)
dω
(m2 − m1 ) Rg
=
dt
J Δ + (m1 + m2 ) R 2
périe
La résolution donne facilement :
ure d
On dispose ainsi de 5 équations à 5 inconnues : z1 , z2 , ω , T1 et T2
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
soit un mouvement uniformément accéléré dans le sens positif d’orientation
indiqué sur la figure si m2 > m1 .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
techn
Th du moment cinétique scalaire pour la poulie sur l’axe Δ dirigé vers l’avant :
dω
= RT2 − RT1 (3)
JΔ
dt
JJG
En effet le moment de − T2 (la tension que le fil de gauche exerce sur la poulie)
JG
est positif et celui de − T1 est négatif ; par ailleurs les moments du poids de la
poulie et de la réaction d’axe sont nuls (+ liaison parfaite).
2320
:160
.179
.65.2
07:1
6929
5453
9
c) 2ème méthode : On étudie cette fois l’ensemble du système pour lui appliquer le
théorème de l’énergie mécanique. Parmi les forces extérieures, seuls travaillent
les poids des deux masses, mais pas le poids de la poulie ni les réactions d’axe
(liaison parfaite) ; parmi les forces intérieures, les tensions ne travaillent pas (le
fil est inextensible, il n’y a pas de déplacement relatif des points d’application des
forces de tension), et la force de frottement entre le fil et la poulie non plus en
l’absence de glissement. On peut donc écrire la conservation de l’énergie
mécanique du système entre t > 0 et t = 0 :
1
1
1
m1 z12 + m2 z22 + J Δω 2 + m1 gz1 + m2 gz2 + Ep poulie = 0 + 0 + 0 + Epm01 + Epm0 2 + Ep poulie
2
2
2
Par dérivation par rapport au temps :
m1 z1 z1 + m2 z2 z2 + J Δωω + m1 gz1 + m2 gz2 = 0
et à l’aide des relations (4) et (5) puis simplification par ω , on retrouve le résultat
précédent pour ω .
8891
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
:211
0753
582:
34. La translation la plus générale d’un solide est curviligne ; il s’agit d’une translation
donc les axes liés au solide restent parallèles à tout instant à ceux du référentiel ( R ) .
Mais la trajectoire du centre de masse G n’est ni rectiligne, ni circulaire, mais
quelconque. Un objet volant qui avance (ou recule) parallèlement à lui-même en se
déplaçant à 3D vers le haut, le bas, à gauche, à droite…
caniq
ue e
t des
Micro
techn
iques
35. Le mouvement de la Terre autour du Soleil est composé :
– d’une translation quasi circulaire décrivant la trajectoire du centre de masse de la
Terre autour du Soleil, mouvement appelé révolution et qui s’effectue en un an,
– d’une rotation autour d’un axe de direction quasi fixe (l’axe des pôles) décrivant
la rotation de la Terre sur elle-même en un jour.
Le mouvement du ballon de rugby est composé :
– d’une translation parabolique décrivant la trajectoire du centre de masse dans le
référentiel du terrain sous l’action du champ de pesanteur, en négligeant les
frottements dans l’air,
– d’une rotation du ballon sur lui-même lorsque le joueur a tiré légèrement à côté du
de la partie centrale du ballon pour lui imprimer ce mouvement.
périe
ure d
e Mé
36. Comme à la question 22. il fixe un morceau de plomb sur la jante de la roue afin que
le centre de masse de l’ensemble soit sur l’axe ; n’importe quelle position de la roue
autour de son axe horizontal est alors position d’équilibre stable (équilibrage
statique). En réalité il en fait un peu plus pour éviter que la roue en rotation n’ait
tendance à tordre l’axe de rotation (équilibrage dynamique). Tout ceci pour éviter
les usures d’axe et donner au dispositif une meilleure longévité.
e Na
Écol
tiona
le Su
37. Lorsque la jambe droite est mise en avant, sur une patinoire horizontale où aucune
force extérieure n’existe parallèlement au sol, la jambe gauche recule afin que le
centre de masse reste immobile dans sa position initiale. Sur un sol normal c’est
&KDSLWUH
6929
5453
9
l’action de contact qu’exerce le sol sur le pied gauche qui l’empêche de reculer et
permet à la personne d’avancer. Ou à un véhicule de démarrer, à un cylindre de
tourner, à une corde de violon d’être entraînée par l’archet,… L’idée qu’une force de
frottement « freine » un mouvement est donc loin d’être toujours juste !
38. Attention : les bras de levier étant inégaux, on n’a pas l’égalité des masses sur les
deux plateaux ! Il faut traduire que la somme algébrique des moments est nulle,
mais comme l’un est positif et l’autre négatif, cela revient à écrire l’égalité des deux
moments en valeur absolue.
07:1
m = m′1m′2
.65.2
m′1 l = m l ′ et m l = m′2 l ′ d’où
:211
0753
582:
8891
2320
:160
.179
39. Le patineur s’élance d’abord, puis en pilant transforme une grande partie de son
énergie cinétique de translation en énergie cinétique de rotation, les bras tendus et
une jambe élancée ; en tournant sur lui-même, son moment cinétique est conservé
(en négligeant le moment de frottement de pivotement), et par conséquent en
ramenant ses bras et sa jambe près du corps, la diminution du moment d’inertie par
rapport à son axe de rotation entraîne une augmentation de la vitesse de rotation
(σ Δ = J Δω = cste) .
Il en est de même de l’élève tournant sur le tabouret d’inertie, bras tendus avec des
masses et qui tourne plus vite en ramenant ses bras vers son corps. L’augmentation
d’énergie cinétique provient du travail des forces intérieures (il s’agit d’un travail
musculaire, les personnes sont des systèmes déformables, pas des solides). Dans
l’autre sens, quand on écarte les bras, du travail doit être reçu par le système
déformable (l’élève sur le tabouret) ce qui peut provoquer un déséquilibre.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
40. Une conversion de l’énergie cinétique au moment de l’appel en énergie potentielle
v2
1
de pesanteur donne : mv 02 = mgh et h = 0 .
2
2g
100
AN : v 0 = v moy =
= 9 m.s −1 soit h ≈ 4 m et donc un saut à 5 m.
11
On est loin des 6,14 m, peu de possibilité du côté de la vitesse initiale, en portant la
perche, les 9 m.s −1 ne peuvent guère être améliorés.
Reprenons les conversions d’énergie : l’énergie cinétique initiale correspond à une
vitesse horizontale qu’il est a priori très difficile de récupérer verticalement (dans le
saut en hauteur, le faible taux de conversion avec le pied d’appel rend inutile une
course rapide). La conversion est assurée ici par la perche : le sauteur transforme
l’énergie cinétique en énergie potentielle élastique de la perche, qu’il récupère
ensuite sous forme d’énergie potentielle de pesanteur lorsque la perche se détend.
L’augmentation d’énergie mécanique doit évidemment être cherchée du côté du
travail des forces intérieures. Ce travail peut augmenter l’énergie mécanique, car le
système est déformable : lors de l’appel le sauteur augmente la torsion de la perche
en ramenant ses avant-bras vers lui, ce qui augmente l’énergie potentielle élastique.
Enfin, tout en haut, en poussant sur la perche, il récupère le travail d’extension des
bras.
Noter enfin que la technique du saut permet de faire passer le centre d’inertie en
dessous de la barre ! Ceci grâce à l’arrondi que donne le sauteur à son corps, faisant
passer les jambes alors que la tête est encore sous la barre.
6929
5453
9
En 2018, un perchiste, prenant son élan sur un skate électrique, a pu franchir 6,17 m.
.65.2
07:1
41. Au XVIIe siècle, la chute libre et corrélativement la mesure de g , accélération de la
pesanteur, était difficile à étudier expérimentalement en raison des durées très
courtes de la chute et de la difficulté de la mesure de cette durée. Atwood (17461807) proposa alors sa machine avec m 2 = m 1 + δ m où δ m est une faible surcharge.
De cette manière l’accélération constante du système proportionnelle à
m 2 − m 1 = δ m et bien sûr à g était grandement réduite (tout se passe comme si m 1
.179
ralentissait la chute de m 2 ), et la mesure de g devenait plus facilement accessible.
582:
8891
2320
:160
42. Avec la relation entre cos θ et ω , si pour une raison quelconque la vitesse ω
augmente, alors l’angle θ augmente, et les boules s’écartent de l’axe augmentant
ainsi le moment d’inertie du dispositif ; ce qui rend plus difficile l’augmentation de
la vitesse angulaire ; même raisonnement si ω diminue, d’où la stabilisation de la
vitesse de rotation du moteur.
0753
([HUFLFHV
:211
43. Couple de rappel et position d’équilibre
a) L’énergie mécanique du système est la somme :
1 2 2
ml θ
2
– de l’énergie potentielle de pesanteur du point A : E p = mgz + cste = mgl cos θ
techn
iques
– de l’énergie cinétique du point A (mouvement circulaire) : Ec =
Micro
par choix de E p (θ = π / 2) = 0 et de l’axe vertical ascendant
g
C
sin θ + 2 θ = 0
l
ml
e Mé
θ −
(1)
ure d
d’où
caniq
ue e
t des
1
– de l’énergie potentielle élastique due au ressort spiral : E ′p = Cθ 2
2
1 2 2
1
2
d’où Em = ml θ + mgl cos θ + Cθ
2
2
Le système étant conservatif (et à un degré de liberté θ ), l’énergie mécanique est
dEm
une constante du mouvement, soit
=0
dt
e Na
Écol
tiona
le Su
périe
Sous la forme ml 2θ = mgl sin θ − Cθ , on reconnaît la loi du moment cinétique
scalaire par rapport à l’axe du ressort. En effet, le point A étant une masse m
ponctuelle à la distance l de l’axe, son moment d’inertie est simplement ml 2 ;
par ailleurs le moment du poids est positif (bras de levier l sin θ ) et le couple de
rappel exercé par le ressort spiral est − Cθ .
&KDSLWUH
C
g
2π
− , et avec T =
, on trouve la période
2
ω
ml
l
dE p
dθ
.65.2
ml 2
C − mgl
.179
c) Les positions d’équilibre sont données par
T = 2π
=0 ;
:160
Alors ω 2 =
07:1
6929
5453
9
g·
§ C
b) Pour θ petit, donc sin θ ≈ θ , l’équation (1) devient θ + ¨ 2 − ¸ θ = 0
ml
l ¹
©
C
g
C’est l’équation d’un oscillateur harmonique à condition que
− > 0 ; alors
2
ml
l
θe = 0 correspond à une position d’équilibre stable.
Cette condition s’écrit C > mgl , ce qui suppose par exemple un ressort avec une
grande constante de torsion ou un point A de faible masse pour être ramené
facilement vers θ e = 0 .
techn
iques
:211
0753
582:
8891
2320
1
C
θe
avec E p = mgl cos θ + Cθ 2 , cela conduit à sin θ e =
mgl
2
ce qui revient à chercher l’intersection d’un sinus (de pente 1 à l’origine) avec
une droite passant par l’origine et de pente C / mgl :
– si, comme précédemment, C > mgl , la seule intersection est θ e = 0 , position
d’équilibre stable
– si, en revanche, C < mgl , la droite coupe la sinusoïde en un point θ e′ ≠ 0 (et
son symétrique − θ e′ ), ce qui se conçoit bien lorsque la masse du point A est
importante ou si le ressort spiral rappelle peu (ressort mou). On conçoit alors
que θ e = 0 est une position d’équilibre instable et θ e′ ≠ 0 est position
d’équilibre stable.
À la limite mgl C (on supprime le ressort spiral !), θ e est donné par
ure d
e Mé
caniq
ue e
t des
44. D’où vient la différence ?
Dans la situation 1, le théorème de l’énergie cinétique appliqué à l’ensemble poulie
+ masse donne (avec le travail nul des forces intérieures, voir question 33.) :
1
1
2 Mgh
J Δ (ω 12 − 0) + M ( x12 − 0) = Mgh ω 12 =
en ayant traduit x1 = Rω 1
J Δ + MR 2
2
2
Dans la situation 2, le théorème de l’énergie cinétique appliqué à la poulie donne :
1
2 Mgh
J Δ (ω 22 − 0) = Fh = Mgh ω 22 =
JΔ
2
périe
D’où le rapport des vitesses de rotation acquises :
ω2
MR 2
= 1+
>1
JΔ
ω1
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
G
Dans le premier cas le travail reçu (celui du poids M g ) sert à augmenter l’énergie
cinétique non seulement de la poulie, mais aussi de la masse M , alors que dans le
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
Micro
sin θ e ≈ 0 , soit ici θ e = π .
second cas, le même travail reçu (celui de l’opérateur) sert uniquement à augmenter
l’énergie cinétique de la seule poulie, d’où ω 2 > ω 1 .
:211
0753
582:
8891
2320
:160
.179
.65.2
07:1
6929
5453
9
45. Intérêt d’un levier « pied de biche »
B
Les forces extérieures qui s’appliquent sur y
A
JG
G
⊕
G
le levier sont : la force F de l’opérateur,
R′
JJG
JG
F
G
la réaction R′ du sol et la force − R (par
−R α
action et réaction) exercée en A par le
α
clou sur le levier (la figure n’est pas à
l’échelle).
x
I
O
JJG
a) Pour éliminer R′ , écrivons à l’équilibre (il s’agit d’un problème de statique), la
nullité de la somme des moments par rapport à l’axe Δ O passant par O : le
JG
JG
moment de F est positif avec un bras de levier OB , celui de − R est négatif
avec un bras de levier IO = OA sin α ; avec F > 0 et R > 0 :
OB
F .OB − R.OA sin α = 0 R =
F soit R = 2,8.103 N
OA sin α
La force utile pour ôter le clou est donc démultipliée par un facteur 14 par rapport
à la force appliquée par l’opérateur, d’où l’intérêt du dispositif.
JJG
b) Pour déterminer R′ , écrivons la nullité à l’équilibre, de la somme des forces
s’appliquant sur le levier :
JG JJG
JG G
Rx′
F sin α
0
0
F + R′ + (− R) = 0 et en projection sur les axes :
+
+
=
R′y
0
− F cos α
−R
iques
en convenant que Rx′ et R′y sont algébriques (contrairement à R et F )
techn
Alors Rx′ = − F sin α < 0 comme sur la figure : Rx′ = −100 N
et R′y = R + F cos α > 0 : Ry′ = 3, 0.103 N
Micro
et finalement R′ = Rx′2 + R′y2 soit numériquement R′ = 3, 0.103 N
ue e
t des
La réaction du sol est évidemment importante. À noter qu’elle est pratiquement
verticale ; si β est l’angle qu’elle fait avec la verticale, tan β = Rx / Ry soit
caniq
β ≈ 2 °.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
46. Le treuil
La tension du fil auquel est accrochée la masse et la force appliquée tendent à faire
tourner le système dans des sens opposés : leurs moments sont donc de signe
contraire ( Δ est l’axe des cylindres). Prenons comme sens positif celui des aiguilles
d’une montre.
a) En l’absence de mouvement, la tension du fil est égale en norme au poids de la
masse ; pour que le mouvement s’amorce, il faut traduire que le moment (positif)
JG
de la force appliquée F est supérieur à la valeur absolue du moment (négatif) de
JG
la tension T du fil :
&KDSLWUH
M FJΔJG = + Fr2 et M TJΔG = −mgr1 ; la condition est F > Fmin =
mgr1
r2
= 6, 0 N
6929
5453
9
On a bien sûr Fmin < mg , c’est l’intérêt du treuil. À noter que le résultat est
JG
indépendant de l’angle que fait la force F avec la verticale, pourvu qu’elle reste
tangente à la poulie pour que le bras de levier soit r2 .
07:1
b) Pour soulever la charge en tirant directement vers le haut sur le filin de gauche, il
faut exercer une force supérieure au poids, soit 10 N ; cette valeur n’est pas
atteinte, l’opération directe n’est donc pas possible.
2320
:160
.179
.65.2
c) En revanche, à l’aide du treuil, on constate numériquement que F > Fmin , le
soulèvement de la charge est donc possible par ce procédé.
La variation d’énergie potentielle de pesanteur de la masse est :
ΔE p = mgh = 10 J
JG
Le travail effectué dans cette phase par l’opérateur exerçant la force F est :
Wop = ³ PFG d t = ³ M FΔG ω dt = F r2 α
582:
F r2 h
= 13 J
r1
0753
Wop =
8891
Car le moment comme la force est constant, et α désigne l’angle dont a tourné la
poulie soit α = h / r1 , d’où
:211
Le travail fourni par l’opérateur sert non seulement à élever la masse mais aussi à
fournir à la masse et au treuil une énergie cinétique ; c’est la raison pour laquelle,
en mouvement, la force appliquée est supérieure en norme au poids à soulever.
Micro
techn
iques
d) La loi de l’énergie mécanique entre les deux instants qui délimitent la phase
d’ascension s’écrit pour l’ensemble masse + fils + treuil (ni frottements, ni travail
des forces intérieures) :
§1 2 1
·
2
¨ mv + J ω + mgh + Ep poulie ¸ − ( 0 + 0 + 0 + Ep poulie ) = Wop
2
©2
¹
La vitesse de la masse et celle du treuil sont liées par v = r1ω , d’où :
2(Wop − mgh )
ue e
t des
= 1, 4 m.s −1
m + J / r12
e Mé
caniq
ce qui confirme la transformation d’une partie non négligeable du travail fourni
en énergie cinétique.
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
47. La tige qui tombe (*)
a) Tant que le contact est maintenu, la tige est en rotation
autour de l’axe fixe Oz ; la loi du moment cinétique
scalaire par rapport à cet axe pour la tige dans le
JG
G
référentiel ( R) s’écrit avec ω ( R ) = α u z :
y
JG
Ry
A
B
G
α
JG
G
mg
• O Rx
:
z
x
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
v=
d §1
·
2
¨ m(2l ) α ¸ = − mgl cos α
dt © 3
¹
α = −
3g
cos α
4l
(1)
α 2 =
(2)
07:1
3g
(1 − sin α ) car dans la chute, α 2
2l
.65.2
Noter que α = −
3g
(1 − sin α )
2l
6929
5453
9
Après multiplication de (1) par 2α et intégration entre α = π 2 (où α = 0 ) et α ,
on a :
Autre méthode, par l’énergie mécanique.
:160
1
2
J Δα 2 = ml 2α 2
2
3
2320
EC =
.179
L’énergie cinétique de la tige en rotation autour de l’axe fixe Δ = Oz est :
8891
La liaison entre O et A (immobile) étant parfaite, la seule action qui travaille est
le poids, force conservative dont l’énergie potentielle est E p = mg yG + cste (l’axe
582:
Oy est orienté vers le haut).
On choisit la constante pour avoir E p = 0 lorsque yG = 0 (soit α = 0 ) d’où :
0753
E p = mgl sin α
2 2 2
ml α + mgl sin α
3
Comme elle est constante au cours du temps, elle s’identifie à sa valeur initiale :
à t = 0 , α (t = 0) = π / 2 et α (t = 0) = 0 , soit Em = mgl
iques
:211
L’énergie mécanique de la barre est : Em = EC + E p =
techn
2 2 2
ml α = mgl (1 − sin α )
3
ce qui redonne directement le résultat (2) qu’il suffit de dériver pour avoir (1).
Micro
Finalement :
ue e
t des
b) Le Th de la résultante dynamique appliqué à la tige dans le référentiel ( R ) :
G
G JG
ma (G )( R ) = mg + R donne en projection sur les axes cartésiens :
mx = Rx et my = Ry − mg (3)
e Mé
caniq
Reste à déterminer
JJJG l cos α G
−lα sin α
x = −l (α sin α + α 2 cos α )
G
, v (G )( R ) =
et a (G )( R ) =
(4)
OG =
l sin α
lα cos α
y = l (α cos α − α 2 sin α )
périe
9
2·
§
mg cos α ¨ sin α − ¸
4
3¹
©
et
Ry =
1
2
mg ( 3sin α − 1)
4
le Su
Rx =
ure d
L’ensemble des relations (4), (1) et (2) permettent de déterminer Rx et Ry par
(3) :
e Na
Écol
tiona
À noter d’abord le résultat cohérent : en position verticale, Rx = 0 et Ry = mg .
&KDSLWUH
6929
5453
9
Rx , action du mur sur la tige, s’annule en changeant de signe pour α ≈ 42° ; dans
son mouvement de chute et vers l’avant, le contact avec le mur est alors rompu.
Ry , action du sol sur la tige, s’annule sans changer de signe pour α ≈ 19° ; le
contact avec le sol semble donc maintenu. En réalité, une fois que la tige a quitté
le mur, il y a changement de nature du mouvement et il faut réécrire les
équations, ce qui conduit à une expression différente de Ry …
.65.2
07:1
48. Barre oscillante
Cet exercice concerne un pendule pesant particulier (comme à la question 31.).
.179
a) La tige étant homogène, son centre de masse G se trouve au milieu de AB . La
trajectoire du point G est un arc de cercle de centre A et de rayon l .
8891
2320
:160
b) La barre est en rotation autour de l’axe fixe Δ = Az et donc :
1
2
EC = J Δθ 2 = ml 2θ 2
2
3
La liaison en A étant parfaite, la seule action qui travaille est le poids, force
conservative dont l’énergie potentielle est E p = − mg yG + cste (attention au signe
E p = − mg yG = − mgl cos θ
0753
582:
– , l’axe Oy étant orienté vers le bas).
On choisit la constante pour avoir E p = 0 en yG = 0 (soit θ = ± π / 2 ) d’où :
2 2 2
ml θ − mgl cos θ (1)
3
Comme elle est constante au cours du temps, elle s’identifie à sa valeur initiale :
à t = 0 , θ (t = 0) = θ 0 et θ(t = 0) = 0 , soit Em = − mgl cos θ 0
Em =
2 2 2
ml θ − mgl cos θ = − mgl cos θ 0
3
Micro
Finalement :
techn
iques
:211
L’énergie mécanique de la barre est : Em = EC + E p =
3g
(1 − cos θ0 )
θv = ±
2l
caniq
2 2 2
ml θ v = mgl (1 − cos θ 0 )
3
e Mé
Le signe n’étant pas le même pour le sens aller et le sens retour.
Alors en norme la vitesse de B dans cette situation est :
ure d
vB = 2l. θv = 6 gl (1 − cos θ0 )
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
d) On dérive l’expression de l’énergie mécanique par rapport au temps :
4 2 3g
ml θθ + mglθ sin θ = 0 θ = − sin θ
3
4l
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
c) Dans la position verticale, θ = 0 , la vitesse angulaire θv de la tige à ce moment
est donnée par la relation précédente :
6929
5453
9
3g
Pour les mouvements de faible amplitude, sin θ ≈ θ , d’où θ ≈ − θ , équation
4l
différentielle admettant une solution sinusoïdale de période (indépendante de
l’amplitude θ 0 ) :
4l
3g
T = 2π
07:1
La solution qui obéit aux deux conditions initiales θ (t = 0) = θ 0 et θ(t = 0) = 0
est :
§ 3g ·
t¸
© 4l ¹
.179
.65.2
θ (t ) = θ0 cos ¨
:160
Rq : le théorème du moment cinétique scalaire conduit au même résultat.
iques
:211
0753
582:
8891
2320
49. Entraînement par frottement solide(*)
a) L’ensemble disque + cadre ne subit aucun moment de forces extérieures par
rapport à l’axe (les poids et la tension du fil sans torsion sont portés par l’axe). Le
moment de frottement sur l’axe est une action intérieure donc elle n’intervient
pas dans la loi du moment cinétique. Le moment cinétique de l’ensemble est
donc conservé, soit entre t = 0 et t = t f ( ω f est la vitesse angulaire commune à
C et D) :
JD
ω0
0 + J Dω 0 = ( J C + J D )ω f ω f =
JC + J D
1
1 J C J D2
ω 20 > 0
J C (ω 2f − 0) =
2
2 ( J C + J D )2
Micro
ΔEc (C ) =
techn
b) Pour le cadre, la variation d’énergie cinétique entre t = 0 et t = t f est :
caniq
ue e
t des
Pour le disque, elle vaut :
1
1 2 J C J D2 + J C2 J D 2
ω0 < 0
ΔEc ( D ) = J D (ω 2f − ω 20 ) = −
2
2 ( J C + J D )2
Et pour l’ensemble :
1 JC J D
ω 20 < 0
ΔEc = ΔEc (C ) + ΔEc ( D ) ΔEc = −
2 JC + J D
ure d
e Mé
L’énergie cinétique du cadre augmente (normal, il commence à tourner), celle du
disque diminue (normal, il est ralenti), et celle de l’ensemble diminue, montrant
que le cadre ne récupère pas toute l’énergie que perd le disque…
e Na
Écol
tiona
le Su
périe
c) Appliquons la loi du moment cinétique scalaire au cadre seul ; le frottement de
pivotement devient alors une action extérieure et son moment positif vaut Γ ,
d’où :
&KDSLWUH
d ωC
Γ
= Γ ωC (t ) =
t+0
JC
dt
Pour le disque seul à présent, qui subit un moment négatif −Γ (par action et
réaction) :
d ωD
Γ
= −Γ ωD (t ) = ω 0 −
t
JD
JC
dt
Rq : la somme membre à membre des deux équations précédentes donne
d ωC
d ωD
+ JD
= 0 , montrant bien que pour le système total, les actions
JC
dt
dt
intérieures disparaissent conduisant à la conservation du moment cinétique
total σ Δ (C ) + σ Δ ( D ) = cste vu à la question a).
.179
J C J Dω 0
( J C + J D )Γ
:160
tf =
La condition ωC (t f ) = ωD (t f ) conduit à
.65.2
07:1
6929
5453
9
JC
2320
d) La loi de l’énergie cinétique écrite pour l’ensemble disque + cadre entre t = 0 et
t = t f s’écrit :
1 JC J D
ω 20 < 0
2 JC + J D
iques
W frott . = ΔEc = −
techn
Il vient
:211
0753
582:
8891
ΔEc = Wint . + Wext .
Le travail des forces extérieures (poids et tension du fil sans torsion) est nul (ces
forces s’appliquent en des points de vitesse nulle).
Le travail des forces intérieures (à ne pas oublier) est celui des forces de
frottements ; en effet il est non nul car l’ensemble n’est pas un solide et se
déforme (les vitesses de rotation sont différentes), d’où Wint . = W frott . cherché.
caniq
4XHVWLRQVRXYHUWHV
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
e Mé
50. Deux singes sur une corde
Reprendre la question 33. de la machine d’Atwood avec ses notations. Ici
m1 = m2 = m ; par ailleurs le moment d’inertie de la poulie étant négligeable, la
relation (3) montre que les deux brins du fil ont même tension T1 = T2 = T . Alors les
relations (1) et (2) non modifiées par l’action du singe S1 montrent que z1 = z2 ,
prouvant que le mouvement des deux singes par rapport au sol est le même ; alors
qu’un seul des deux singes entreprend de s’élever, l’autre attend de monter sans
effort…
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
On comprend alors que la différence entre l’énergie cinétique cédée par le disque
et celle reçue par le cadre est perdue par dégagement thermique au niveau des
pivots par frottement.
Il s’agit là d’un exemple de système non conservatif par travail des forces
intérieures.
6929
5453
9
51. Le hand spinner (*)
Indications : Faire une figure, modéliser les actions du pouce et de l’index de part
JJJG
et d’autre du centre, et en déduire le sens de la variation dσ du
moment cinétique pendant dt .
07:1
Le pouce sous le hand spinner exerce en M 1 (légèrement d’un côté du centre, en
JJG
avant sur la figure) une force F1 dans le sens de Oz
z
.179
.65.2
et l’index au-dessus du hand spinner exerce en M 2
(légèrement de l’autre côté du centre, en arrière sur
JJG
la figure) une force F2 dans le sens opposé à Oz .
JJG
JJG
Les actions F1 et F2 des deux doigts se résument à
un couple de moment parallèle à Ox :
JJJJG JJG JJJJJG JJG
G
OM 1 ∧ F1 + OM 2 ∧ F2 = C ux
:160
JJG
F1
582:
0753
:211
x
techn
O
M1
8891
y
iques
Le théorème du moment cinétique appliqué au hand
spinner s’écrit :
JJJG
d σ JJJJG JJG JJJJJG JJG
G
= OM 1 ∧ F1 + OM 2 ∧ F2 = C u x
dt
JG
Le moment cinétique
σ
varie alors de
JJJG
JG
G
dσ = C ux dt = C dt pendant dt , ce qui provoque une
rotation de l’axe du hand spinner autour de Oy , ce qui
est l’effet constaté mais pas l’effet attendu !
2320
x
M2
JJG
F2
JJJG
dσ
JG
C
z
JG
σ
O
y
ue e
t des
Micro
52. Un peu de marche
Indications : Penser au fait que le centre de masse du randonneur effectue de petites
oscillations verticales ; d’où vient l’énergie potentielle dans la phase
ascendante ? que devient-elle dans la phase descendante ?
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
Les énergies cinétique et potentielle de pesanteur sont les mêmes au début et à la fin
de la randonnée. L’énergie mécanique n’a pas varié.
En fait, en marchant, notre centre de masse effectue de petites oscillations.
Déplacement vers le haut lorsque la jambe d’appui se tend et vers le bas lors du
passage sur la jambe que l’on vient d’avancer et qui est pliée. Dans la phase
ascendante le travail musculaire (travail des forces intérieures) se transforme en
énergie potentielle. Mais dans la phase descendante cette énergie n’est pas
récupérée, elle est transformée en chaleur lors du contact avec le sol.
On peut récupérer une partie de l’énergie avec des semelles très élastiques.
On pose L = 5, 0 km et on estime l’amplitude des oscillations a = 2 cm , la
longueur de chaque pas A = 0, 7 m et la masse du randonneur m = 80 kg .
&KDSLWUH
Le nombre de pas est
L
et sur chaque pas l’énergie à fournir est mga .
A
W = mga
L
A
6929
5453
9
Le travail à fournir correspond à l’énergie potentielle totale :
07:1
AN : W ≈ 0,1 MJ soit environ 1% de l’apport alimentaire quotidien moyen. Ce
L
travail correspond aussi à une dénivellation équivalente de a ≈ 140 m .
A
Le plongeur de masse m , hauteur 2a , a les
pieds en O et est en rotation autour d’un axe
horizontal Δ = Ox , dirigé vers l’arrière de la
figure. Le plongeon étant passif, on considère le
plongeur comme une barre rigide. On modélise
cette première phase avec les pieds qui ne
glisseront pas, le plongeur quitte le plongeoir
quand la réaction normale s’annule. On repère sa
position avec l’angle θ par rapport à la verticale
ascendante.
O
2320
θ
G
ur
G
G
g
8891
G
ux⊗
:160
z
h
techn
iques
:211
0753
582:
G
uθ
Micro
Le théorème du centre de masse appliqué au
plongeur dans le référentiel terrestre, en
négligeant les frottements sur l’air :
G
G JG
ma (G )( R ) = mg + R
On modélise la réaction par :
JG
JJG
JJG
R = R n u r − Rt u θ
.179
.65.2
53. Un plongeon qui se termine mal
Indication : Modéliser le plongeur par une barre rigide en rotation autour d’un axe
fixe passant par ses pieds.
e Mé
caniq
On projette sur la base polaire :
G
Ź sur ur : m(0 − aθ 2 ) = −mg cos θ + Rn (1) ( Rn > 0)
G
Ź sur uθ : m(0 + aθ) = mg sin θ − Rt
(2) ( Rt > 0)
e Na
Écol
6ROLGHHQURWDWLRQDXWRXUG·XQD[HIL[H
tiona
le Su
périe
ure d
En effet, en l’absence de glissement, la distance OG = a est constante et le
mouvement de G circulaire.
Initialement, la vitesse étant très faible : θ = 0 et θ = 0 .
Le théorème de l’énergie cinétique donne avec ces conditions initiales (seul le poids
travaille) :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Avec R n et Rt les normes des réactions normale et tangentielle, en effet la réaction
normale est perpendiculaire à la plante des pieds et la réaction tangentielle suivant
JJG
uθ , en l’absence de mouvement horizontal et d’action appliquée dans cette
direction. Cette force de frottement s’oppose au glissement vers le bas du plongeur.
1
J Δ (θ 2 − 0) = + mga (1 − cos θ ) (3)
2
Le plongeur quitte le plongeoir quand R n s’annule, pour θ = θ 0 :
1
3
=
§
JΔ · 5
¨1 +
2 ¸
© 2ma ¹
cos θ0 =
6929
5453
9
(1) et (3) donnent
.65.2
07:1
g
À cet instant θ0 2 = cos θ0 , la composante verticale de la vitesse de G est
a
v 0 z = − a ω 0 sin θ 0 et la cote de G est z 0 = a cos θ 0
2320
:160
.179
AN : avec une taille de 1,80 m , on prend a = 0, 90 m :
θ 0 = 53° ; θ0 = 2, 6 rad.s −1 ; v 0 z = −1,8 m.s −1 ; z 0 ≈ 0, 5 m
Les ordres de grandeur sont cohérents avec le dispositif expérimental, ces valeurs
constituent les conditions initiales de la seconde phase du mouvement.
(
iques
:211
0753
582:
8891
Après avoir quitté le plongeoir, le plongeur n’est plus soumis qu’à son poids, de
moment nul en G (on néglige encore les frottements sur l’air), on admet un modèle
simple de mouvement de rotation sensiblement uniforme autour de Gx :
θ = cste = θ0 θ (t ) = θ 0 + θ0 t
Le théorème du centre de masse pour le plongeur en chute libre s’écrit :
1
m z = − mg z = z0 + v0 z t − g t 2
2
en prenant une nouvelle origine des dates au moment où le plongeur quitte le
plongeoir.
En posant z f ≈ − h , la durée τ de chute est la racine positive de :
)
ue e
t des
Micro
techn
1 2
gt + a θ0 sin θ0 t − ( h + z0 ) = 0 et θ f ≈ θ 0 + θ0τ
2
AN : 4,9 t 2 + 1,8 t − 10,5 = 0 a pour racine positive τ ≈ 1,3 s et θ f ≈ 4,3 rad ,
soit une rotation totale d’environ 0,7 tour et une arrivée pratiquement sur le
dos !
Avec la même modélisation, au plongeoir de 5 m on trouve θ f ≈ 3, 2 rad et
une arrivée plus satisfaisante tête la première.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
L’expérience est déconseillée, le modèle est simpliste et ne prend pas en compte les
frottements sur l’air.
&KDSLWUH
07:1
6929
5453
9
&KDSLWUH
2VFLOODWHXUVHWIRUFHV
FHQWUDOHV
.65.2
/HVRUGUHVGHJUDQGHXUXWLOHV
:160
.179
Ils sont regroupés au début du chapitre 6, page 323.
2320
/HFRXUVG·DERUG
8891
2VFLOODWHXUVDPRUWLV
582:
Revoir les questions 29. à 33. du chapitre 4.
techn
iques
:211
0753
Une masse m au point M se déplace sur une droite horizontale et sa position
d’équilibre est x = 0 ; elle est soumise de la part d’un ressort à une force de rappel
G
proportionnelle à l’élongation − k xu x ( k > 0 , la raideur du ressort) et éventuellement de
la part d’un dispositif d’amortissement à une force de frottement fluide modélisée par
G
x ( λ > 0 , le coefficient de frottement fluide).
une force en −λ xu
Micro
1. Écrire l’équation d’évolution du système ; comment varie au cours du temps son
énergie mécanique ? Quel est l’équivalent électrique pour le dipôle RLC des
grandeurs mécaniques suivantes : m , k , λ , x(t ) et v(t ) ?
e Mé
caniq
ue e
t des
2. Pour l’oscillateur amorti, donner pour chacun des trois régimes (à définir et
caractériser) la solution x(t ) avec les conditions initiales suivantes :
x(t = 0) = x0 > 0 et v(t = 0) = 0 (on lâche la masse avec une vitesse initiale nulle
hors de la position d’équilibre). Tracer et commenter les graphes x(t ) . Représenter
également le portrait de phase x ( x) et commenter.
périe
ure d
3. Dans le cas du régime pseudopériodique, définir le décrément logarithmique δ et
comparer la pseudopériode T à la période propre T0 ; quelle relation lie ces trois
grandeurs ?
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
4. Toujours pour le régime pseudopériodique, comment s’écrit l’énergie mécanique
Em (t ) dans le cas d’un très faible amortissement ? Calculer alors la variation ΔEm
d’énergie mécanique sur une pseudopériode et en déduire l’expression du facteur de
2π Em
. Commenter ce résultat et conclure en
ΔEm
revenant sur l’analogie avec le dipôle RLC en régime libre.
qualité (définition énergétique) : Q =
6929
5453
9
2VFLOODWHXUVHQUpJLPHVLQXVRwGDOIRUFp
07:1
Voir à ce sujet les questions 3. à 6. du chapitre 5 et s’appuyer sur les analogies (question
1. de ce chapitre) avec le dipôle RLC mis en régime forcé par un générateur de tension
sinusoïdale.
.179
.65.2
5. Quel dispositif pratique peut-on utiliser pour soumettre la masse m à une force
sinusoïdale de fréquence réglable et d’amplitude constante ?
2320
:160
6. Exprimer en RSF de pulsation ω , l’énergie mécanique instantanée de l’oscillateur,
puis sa valeur moyenne et la valeur moyenne de sa dérivée par rapport au temps.
Montrer que la puissance de la force excitatrice compense en moyenne la puissance
de la force de frottement.
8891
&KDPSGHJUDYLWDWLRQ
582:
7. Donner l’expression de la force de gravitation entre deux masses ponctuelles m1 et
:211
0753
m2 . En déduire le champ de gravitation créé par une masse ponctuelle en un point
quelconque de l’espace. À quelle condition le champ gravitationnel créé par un
astre, en un point extérieur, est-il le même que celui créé par une masse ponctuelle ?
techn
iques
8. Définir le référentiel de Copernic (C ) , le référentiel géocentrique, puis le référentiel
terrestre ( R ) , et détailler le mouvement de ( R ) par rapport à (C ) .
Micro
9. Dans le cadre de l’hypothèse d’une Terre à symétrie sphérique, exprimer le champ
de gravitation terrestre. Calculer la valeur numérique correspondante au niveau du
sol et commenter, on donne : G = 6,67.10 −11 N.m 2 .kg −2 ; M T = 6, 0.10 24 kg ;
ue e
t des
rayon dans le modèle sphérique : RT = 6, 4.10 6 m .
Exprimer l’énergie potentielle de gravitation. Définir et calculer la vitesse de
libération à partir du sol, préciser clairement le référentiel.
ure d
e Mé
caniq
10. Quelle est la période de rotation de la Terre autour de l’axe des pôles dans le
référentiel géocentrique, appelée jour sidéral Tsid ? Pourquoi est-elle différente du
jour solaire moyen Tsm = 24 h ?
)RUFHVFHQWUDOHVFRQVHUYDWLYHV
e Na
Écol
tiona
le Su
périe
G
Le point matériel de masse m est soumis à une force centrale f passant par un point
fixe O d’un référentiel galiléen ( R) .
&KDSLWUH
11. Montrer que dans le cas d’une interaction entre deux points matériels de masse m et
M très différentes, par exemple M m , le point de masse M reste quasiment
immobile au centre de masse G du système des deux points. On admet que la point
G correspond au point O fixe du référentiel galiléen d’étude.
07:1
6929
5453
9
G
12. Donner l’expression de f , force centrale conservative, dans le cas de l’interaction
gravitationnelle entre deux masses ponctuelles, puis de l’interaction électrostatique
entre deux charges ponctuelles. Quels sont les différences et points communs de ces
deux cas ?
:160
.179
.65.2
G
13. Soit σ O ( R ) le moment cinétique au point O dans le référentiel ( R) d’un mobile M
G JJJJG
G
de masse m , de vecteur position r = OM et de vecteur vitesse v ( M )( R ) dans ( R ) .
Comment évolue ce moment cinétique lorsque le point M est soumis à une force
centrale de « centre » O ? Quelle conséquence importante cela a-t-il sur la
trajectoire du mobile ? Quel système de coordonnées peut-on choisir dès lors ?
2320
G
14. Calculer alors le moment cinétique σ O ( R ) , en choisissant soigneusement le système
582:
8891
de coordonnées. Donner l’expression de la constante C = σ O / m , puis énoncer et
interpréter la « loi des aires ».
0753
15. Définir l’énergie potentielle associée à la force centrale conservative, dans les deux
cas de la question 12., et exprimer l’énergie mécanique E du système.
iques
:211
0RXYHPHQWVGDQVXQFKDPSJUDYLWDWLRQQHO
Micro
techn
16. On considère l’interaction gravitationnelle entre m et M fixe en O. Définir, à partir
des lois de conservation, une énergie potentielle effective Veff (r ) limitant le
problème à l’étude du mouvement radial. Faire l’étude énergétique complète. Quels
états distingue-t-on ?
ue e
t des
17. Conformément à l’étude question 16., montrer que la relation fondamentale
appliquée à m admet une solution de type trajectoire circulaire, soit r = r0 .
Exprimer alors la vitesse en fonction de G , M et r0 . Commenter. Exprimer, de
caniq
même, l’énergie mécanique en fonction de G , M , m et r0 .
ure d
e Mé
18. Dans l’étude question 16., dans le cas E < 0 (système lié), écrire l’équation du
second degré vérifiée par les valeurs rmin et rmax (correspondant à r = 0 ). Sans la
résoudre exprimer la somme rmin + rmax en fonction de E. Montrer que cette relation
généralise l’expression de E vue pour un mouvement circulaire.
le Su
périe
$SSOLFDWLRQVDX[SODQqWHVHWVDWHOOLWHV
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
Pour les questions avec mouvement elliptique (MPSI), utiliser le formulaire
« caractéristiques d’une ellipse » donné chapitre 0.
L’étude des satellites de la Terre est faite dans le référentiel géocentrique galiléen.
.179
.65.2
07:1
6929
5453
9
19. Un satellite de masse m est en orbite circulaire de rayon r0 autour de la Terre de
masse M T .
a) Montrer que la vitesse v du satellite est constante en norme ; comment varie-telle en fonction du rayon r0 de l’orbite ? Quelle est la relation entre sa période T
et le rayon r0 ?
AN : Pour un satellite en orbite basse, calculer la vitesse et la période, on donne
g 0 = 9, 8 m.s −2 et RT = 6, 4.10 6 m .
b) À quelle condition un satellite peut-il être géostationnaire et quelle est son
altitude ?
2320
:160
20. Quelle énergie minimale doit-on communiquer à un satellite, initialement au sol sur
Terre, pour le mettre en orbite elliptique de demi-grand axe a. Montrer que la
satellisation à partir du sol est impossible.
582:
8891
21. (MPSI) Pour un satellite sur une trajectoire elliptique, exprimer la constante des
aires avec les caractéristiques du mouvement à l’apogée et au périgée. Exprimer la
norme de la vitesse en un point quelconque de la trajectoire.
techn
iques
:211
0753
22. Énoncer les lois de Kepler. Montrer que l’étude théorique avec l’interaction
gravitationnelle permet de les retrouver (en considérant le cas particulier d’un
mouvement circulaire pour la troisième). Comment généraliser la troisième loi de
Kepler pour un mouvement elliptique ? Comment peut-on accéder à la masse du
Soleil, à partir des caractéristiques mesurées du mouvement de la Terre :
a = 1 UA = 1, 5.10 8 km et T = 1an = 365, 25 jours , G = 6, 67.10 −11 u.S.I.
Micro
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
caniq
ue e
t des
La période de rotation de la Terre autour de l’axe des pôles est donnée par le
jour sidéral qui ne concerne que la rotation propre et non par le jour solaire
moyen qui cumule les effets de la rotation propre et de la translation quasi
circulaire de la Terre autour du Soleil.
ure d
e Mé
Il faut toujours bien penser à exploiter les constantes du mouvement
(conservation du moment cinétique et de l’énergie mécanique) dans le cas d’un
mouvement à force centrale.
Pour la Terre, dans le cadre du modèle sphérique, la constante GM T s’écrit
e Na
Écol
tiona
le Su
périe
aussi g 0 RT2 , où g 0 est le champ de gravitation à la surface.
&KDSLWUH
07:1
6929
5453
9
(MPSI) Pour un mouvement elliptique, ne pas chercher à projeter la relation
fondamentale de la dynamique sur la base polaire, en un point quelconque, les
G
équations sont alors trop compliquées car le vecteur uθ n’est pas le vecteur
tangent à la trajectoire. Utiliser les points particuliers apogée et périgée, ainsi
que les relations fournies par l’énoncé.
.65.2
$SSOLFDWLRQVGLUHFWHVGXFRXUV
.179
Pour les questions avec mouvement elliptique (MPSI), utiliser le formulaire
« caractéristiques d’une ellipse » donné chapitre 0.
8891
2320
:160
23. Pour l’oscillateur amorti, reprendre la question 2. et donner pour chacun des trois
régimes, la solution x(t ) avec les conditions initiales suivantes : x(t = 0) = 0 et
v(t = 0) = v0 > 0 (la masse est lancée à partir de la position d’équilibre avec une
vitesse initiale). Tracer et commenter les graphes x (t ) .
0753
582:
24. La force gravitationnelle de Newton satisfait-elle le principe de l’action et de la
réaction ?
:211
25. Sur la Lune le temps de chute d’un objet sur une hauteur h = 1, 0 m est τ = 1,1 s . En
déduire la masse M L de la Lune, dans le cadre d’un modèle sphérique, sachant que
iques
son rayon moyen est RL = 1, 75.103 km .
Micro
techn
26. Quelles caractéristiques de la trajectoire sont fixées par chacune des constantes du
mouvement (moment cinétique et énergie mécanique) dans le cas d’une force
newtonienne ?
caniq
ue e
t des
27. Saturne, sixième planète du système solaire, est entouré de nombreux satellites et
anneaux. Pour étudier quelques aspects de son environnement de Saturne, le
référentiel « saturnocentrique » est considéré comme galiléen. Et pour simplifier, la
planète Saturne possède ici une répartition de masse à symétrie sphérique : S est son
centre d’inertie, M S sa masse et R S son rayon.
La valeur de la constante de gravitation G est : G = 6, 67.10 −11 N.m 2 .kg −2 .
e Mé
a) Téthys, satellite de Saturne, possède un mouvement circulaire autour de S, de
rayon RT = 2, 9.10 8 m et de période TT = 1, 6.10 5 s . Hypérion, un autre
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
satellite, a une trajectoire elliptique de demi grand axe a H = 1, 5.10 9 m . Calculer
v
la masse de Saturne et la période d’Hypérion.
b) Anneaux de Saturne. Soient M 1 et M 2 deux points des
bords d’un anneau large (supposé circulaire) de Saturne
situés respectivement aux distances r1 et r2 du centre de
r
r1 r2
6929
5453
9
Saturne considéré comme un astre à symétrie sphérique. L’effet Doppler optique
permet de mesurer depuis la Terre la vitesse v des points situés entre M 1 et M 2
dans le référentiel saturnocentrique, sur leur trajectoire circulaire. Le résultat des
mesures donne le graphe représenté.
Dire comment cette mesure permet de savoir si l’anneau est un corps solide ou un
ensemble de fragments indépendants de petites dimensions.
30,06
39,43
164,79
248,6
:160
0,044
2320
0,0082
8891
1,00
1,88
11,86
29,46
582:
0,72
1,00
1,52
5,20
9,54
excentricité e
0,007
0,017
0,093
0,048
0,056
0,029
0,009
0,248
:211
Vénus
Terre
Mars
Jupiter
Saturne
Titan (satellite
de Saturne)
Neptune
Pluton
demi-grand axe a en U.A. période T en années
0753
Astre
.179
.65.2
07:1
28. (MPSI) Pour répondre aux questions utiliser les données du tableau ci-dessous et le
formulaire sur les ellipses chapitre 0. Pour les planètes il s’agit de données
concernant leur mouvement orbital autour du Soleil, pour Titan, satellite de Saturne,
les données concernent son mouvement autour de Saturne. Donner une réponse
littérale justifiée puis faire l’application numérique.
e Mé
caniq
ue e
t des
Micro
techn
iques
a) Quelle est la distance entre les deux foyers de l’orbite de Jupiter ?
b) Quelle est la distance Jupiter-Soleil à l’aphélie ?
c) Montrer que Pluton peut être plus rapproché du Soleil que Neptune.
d) Quelle est la masse de Saturne en masse solaire ?
e) Quelle est la période orbitale sidérale de Vénus ?
f) Calculer les vitesses de Mars à l’aphélie et au périhélie.
g) La comète de Halley (dernier passage en 1986) décrit une orbite elliptique autour
du Soleil, de période T = 76 ans , sa distance au centre du Soleil au périhélie
étant rP = 0, 59 U.A. Calculer son demi-grand axe et son excentricité.
En 1705 Edmond Halley, grâce aux lois de la gravitation nouvellement énoncées
par Newton (1687), prédit le retour de la comète observée en 1682 pour l’année
1758, ce qui se produisit effectivement, malheureusement après sa mort (1742). Il
avait montré que cette comète avait été observée en 1531 et 1607. On a retrouvé
des témoignages du passage de la comète de Halley jusqu’en 239 avant J.C.
e Na
Écol
tiona
le Su
périe
ure d
29. Expérience de Cavendish : mesure de G (1798)
Un pendule de torsion est constitué d’un fil de constante de torsion C de masse
négligeable, d’une tige de longueur 2l , de masse également négligeable, équipée en
ses extrémités A et B de deux masselottes quasi ponctuelles de masse m . La tige
est suspendue au fil en son centre (l’axe vertical Oz matérialisé par le fil passe par
le centre de masse de la tige). L’extrémité supérieure du fil est maintenue fixe
&KDSLWUH
(encastrée), si la tige tourne d’un angle θ , le fil exerce sur la tige un couple de
JJG
rappel −C θ u z .
6929
5453
9
a) On mesure la pulsation ω 0 = 2,5.10 −2 rad.s −1 du pendule ; établir son expression.
b) On approche perpendiculairement à l’axe AB d’équilibre deux sphères
homogènes S1 et S2 , de centres O1 et O2 , de masse M = 50 kg dans le plan
.65.2
07:1
horizontal du pendule jusqu’à ce que O1 A = O2 B = l = 0,10 m , ces segments étant
perpendiculaires à AB lors de la mesure, dans la position finale (voir figure). Le
pendule a alors tourné d’un très faible angle θ = 17′ (minutes d’arc) par rapport
à sa position avant d’approcher les sphères. En déduire une mesure de la
constante de gravitation G , en limitant le calcul aux seules interactions O2 B et
•O2
:160
2320
B
A
S1
• O1
O
O
0753
B
l
m
582:
m
θ
S2
8891
A
l
.179
O1 A . Comment expliquer une valeur significativement plus petite que la valeur
donnée habituellement ?
Micro
techn
iques
:211
c) Reprendre le calcul théorique en considérant les interactions O 2 A et O1 B .
Commenter la nouvelle valeur mesurée.
d) Les difficultés expérimentales, outre la valeur très faible de la constante de
torsion, sont liées à la valeur très petite de l’angle θ à mesurer. Est-ce une bonne
idée de diminuer les distances O2 B et O1 A , pour avoir un angle plus grand et
augmenter la précision de mesure ?
ue e
t des
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
e Mé
caniq
30. Deux réservoirs sont en communication grâce à une
conduite horizontale de diamètre d variable. Au
début le robinet R est fermé et le niveau de fluide
plus ou moins visqueux de part et d’autre n’est pas
le même. Après ouverture du robinet, à quel type de
régime a-t-on affaire ?
R
d
périe
ure d
31. Pourquoi le mouvement d’une corde vibrante est-il amorti (penser à celle d’un
instrument de musique) ?
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
32. On s’intéresse au mouvement de translation vertical d’une voiture de masse à vide
m . L’origine de l’axe Oz repère la position du centre de masse de la voiture dans la
situation où celle-ci est immobile, en équilibre.
.65.2
07:1
6929
5453
9
La suspension du véhicule peut être modélisée par un
z
ressort de raideur k , placé en parallèle avec un
• m
0
amortisseur qui exerce une force de frottement
G
dz G
f = −α u z .
dt
α
k
a) Établir l’équation différentielle vérifiée par z (t ) , et
déterminer le coefficient α en fonction de m et k
pour que le régime d’amortissement des oscillations
soit critique lorsque la voiture est vide.
b) La voiture contient à présent des passagers de masse m p . Quel est alors le régime
d’amortissement ? Pour que la voiture soit confortable, on souhaite une pseudopériode T ≈ 1 s adaptée à l’organisme humain. Quelle raideur k doit avoir le
:160
.179
ressort si m = 1,5 103 kg et m p = 300 kg ?
8891
2320
33. Lorsque l’alimentation du moteur d’une machine-outil, fixée sur un support et
lancée à grande vitesse de rotation, est coupée, on constate souvent que pendant la
phase de décélération (à l’oreille le son émis est de moins en moins aigu) il arrive un
moment assez court pendant lequel le support se met à vibrer fortement ; expliquer.
582:
34. Pourquoi pour battre des œufs dans un bol le fait-on très vite ?
:211
0753
35. La position du Soleil, dans le plan de l’écliptique, est repérée par un système de
coordonnées polaires. Comment est défini l’axe polaire ? À quelles positions
correspondent les changements de saisons ?
techn
iques
36. Historiquement Kepler trouve, expérimentalement, pour le mouvement des planètes
T2
du système solaire autour du Soleil la loi 3 = cste (3e loi de Kepler). En réalité, en
a
notant M S la masse du Soleil et mP la masse de la planète, l’expression théorique
Micro
T2
4π 2
=
, 3e loi de Kepler généralisée (voir la question
a 3 G ( M S + mP )
44.). Est-ce compatible avec la loi énoncée par Kepler ? Justifier numériquement la
réponse et la commenter.
ue e
t des
de cette loi est
caniq
37. Pourquoi les bases de lancement de fusée sont-elles proches de l’équateur ? Les
satellites de la Terre tournent-ils tous dans le même sens ?
ure d
e Mé
38. Quel est le nombre minimal de satellites géostationnaires nécessaires pour couvrir
« l’ensemble » de la Terre ? Quelles sont les latitudes extrêmes atteintes théoriquement ?
e Na
Écol
tiona
le Su
périe
39. Un trou noir est un astre de petite taille et très dense dont le champ gravitationnel en
surface est si intense que même les photons (de vitesse c = 3.108 m.s −1 ), et donc la
lumière, ne peuvent s’en échapper. Trouver le rayon (dit de Schwarzschild) en
dessous duquel une étoile comme le Soleil se comporterait comme un trou noir ;
commentaire.
&KDSLWUH
([HUFLFHV
:160
.179
.65.2
07:1
6929
5453
9
40. Oscillations forcées sur un cercle en rotation
G
g
Un point matériel M de masse m est mobile sur un cercle de
rayon R, d’axe Oy horizontal, dans le champ de pesanteur
terrestre. La position de M est repérée par l’angle θ que
x
Oy :
forme OM avec la verticale descendante Oz .
On impose au cercle un mouvement de rotation oscillant
ψ
M
autour de son axe horizontal Oy ; sa position est repérée par
θ A
l’angle ψ que forme OA avec Oz , A étant un point fixe du
z
cercle. La loi est ψ (t ) = ψ 0 sin ( Ωt ) .
Le point M est soumis à une force de frottement de type fluide, de la part du cercle,
G
G
G
modélisée par F = − μ v′ où v′ représente la vitesse du point M par rapport au
cercle. Le référentiel terrestre est galiléen.
iques
:211
0753
582:
8891
2320
a) Établir l’équation différentielle vérifiée par θ .
b) On suppose que θ reste petit, expliquer pourquoi, au bout d’un temps
suffisamment long, on a θ (t ) du type : θ (t ) = θ 1 sin ( Ωt + Φ ) . Comment
appelle-t-on ce régime ?
μ
g
c) Exprimer θ 1 et Φ en fonction de Ω , en posant α =
et ω 02 = .
2m
R
d) Montrer que Φ est compris entre − π / 2 et π / 2 , et que pour Ω < ω 0 , Φ est
positif. Comment expliquer que les oscillations de M puissent être en avance sur
celles du cercle représentées par ψ (t ) ?
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
41. Vibrations d’un moteur
Lorsqu’un moteur imparfaitement équilibré fonctionne, un
z
balourd provoque des vibrations du châssis et il est
nécessaire de prévoir un système de suspension. Le
• m
0
moteur, dans ce mouvement de translation, est assimilé à
un point matériel de masse m . Quant à la suspension, elle
peut être modélisée par un ressort de longueur à vide l0 et
α
k
de raideur k , placée en parallèle avec un amortisseur qui
G
dz G
exerce sur le moteur une force de freinage f = − α u z .
dt
Le fonctionnement proprement dit du moteur entraîne, par inertie, l’apparition d’une
JG
G
force supplémentaire de la forme d’une excitation sinusoïdale F = F0 cos(ω t ) uz .
L’origine de l’axe Oz repère la position du moteur dans la situation où celui-ci ne
fonctionne pas et est immobile.
a) Établir avec soin l’équation différentielle vérifiée par z (t ) .
b) En régime sinusoïdal établi, on cherche pour la vitesse des solutions de la forme :
v (t ) = V0 cos(ω t + ϕ ) ; donner l’expression de l’amplitude V0 de la vitesse et
tracer, puis le commenter, le graphe de la fonction V0 (ω ) .
c) La pièce mobile du moteur, dont la masse est m = 10 kg , à une vitesse de rotation
de 100 tours/s . On dispose de deux ressorts de raideur k1 = 4.106 N.m −1 et
42. (MPSI) Transfert d’orbites d’un satellite
a) On veut porter un satellite de la trajectoire
circulaire r1 = r0 où sa vitesse est v0 à la
6929
5453
9
k2 = 106 N.m −1 ; lequel est-il conseillé de choisir pour réaliser la suspension ?
2r0
r0
A1
A2
trajectoire circulaire r2 = 2r0 grâce à un
réacteur (on suppose cependant que la
masse m du satellite reste constante). En
un point A1 , cela revient à lui
communiquer une vitesse v1′ > v0 de telle
façon qu’il décrive une ellipse (dite de
transfert) de grand axe A 1 A 2 (la variation de vitesse se produit sur une durée
suffisamment brève pour pouvoir considérer que pendant cette variation la vitesse
garde la même direction et que l’altitude ne change pas). Il arrive en A 2 avec une
vitesse v2′ . On lui communique alors une vitesse v2 (toujours de façon quasi
<
8891
2320
:160
.179
.65.2
07:1
<
582:
instantanée) pour qu’il décrive une trajectoire circulaire de rayon r2 .
:211
0753
Déterminer les énergies sur les trajectoires en fonction de k = GM T m et de r0 .
Comment l’énergie du satellite a-t-elle pu varier alors que la force gravitationnelle est conservative ? Calculer les vitesses v1′ , v2′ et v2 en fonction de v0 .
techn
iques
b) Le satellite étant sur la trajectoire circulaire de rayon r2 , quelle variation de
vitesse, dans les conditions décrites au a), permet d’obtenir une trajectoire
parabolique ?
Micro
43. (MPSI) Utilisation des profils énergétiques
On reprend l’étude énergétique faite à la question 16.. Sur le diagramme énergétique
on voit que l’énergie de type E 2 , sur une trajectoire elliptique, vérifie E 2 > E 0
ue e
t des
(avec E 0 l’énergie minimale). Il semblerait donc que l’énergie sur une trajectoire
elliptique soit toujours supérieure à l’énergie sur la trajectoire circulaire.
Considérons un satellite, comme à la question 42., sur une
JJG
JG JJG
trajectoire circulaire et un point M 0 , r0 , v 0 avec r0 ⊥ v 0 ,
)
caniq
(
de cette trajectoire. Si on diminue la vitesse en M 0 , en la
e Mé
faisant passer de v 0 à v1 , la trajectoire devient elliptique,
M0
G
v1
G
v0
périe
ure d
d’apogée M 0 et d’énergie E1 < E 0 ! Où est l’erreur de
raisonnement ?
T
e Na
Écol
tiona
le Su
44. Système de deux étoiles (*)
On modélise les deux composantes d’une étoile double (système de deux étoiles très
proches l’une de l’autre) comme des astres à répartition sphérique de masse, de
masses m1 et m 2 isolés dans l’espace et en interaction gravitationnelle.
&KDSLWUH
6929
5453
9
a) Quelle est le mouvement du centre d’inertie du système ? Conclusion sur le
référentiel barycentrique RG ?
b) On considère que les deux étoiles décrivent des orbites circulaires de centre G et
de rayons respectifs r1 et r2 , on pose a = r1 + r2 . Montrer que les deux étoiles ont
m
r
la même période T et que 2 = 1 .
m1 r2
c) Troisième loi de Kepler généralisée, montrer que la période orbitale s’écrit :
1
2320
:160
.179
.65.2
07:1
§
·2
a3
T = 2π ¨
¸
© G (m1 + m2 ) ¹
Considérer le cas m1 m2 .
(MPSI) On admet la validité des relations établies ci-dessus dans le cas de
trajectoires elliptiques en remplaçant les rayons r1 et r2 par les demi-grands axes a1
et a2 .
ue e
t des
Micro
techn
iques
:211
0753
582:
8891
45. (MPSI) Force centrale non newtonienne
On considère un mouvement plan d’une particule M de masse m , repérée par des
G
3mr03v02 G
coordonnées polaires et soumise à une force f = −
ur .
2r 4
Dans cette écriture r0 et v0 sont les normes de la
position et de la vitesse initiales, conditions dans
JG JJG
M 30
1
lesquelles, pour θ = 0 , on a r0 ⊥ v0 .
G
r
0.5
On montre que la particule a alors pour trajectoire
G
f
G
v0
un arc de cardioïde [d’équation pour information
ur
G
θ
r0
r = r0 (1 + cos θ ) / 2 ], à l’issue de laquelle le mobile
0
r
M tombe sur le centre attracteur O où le
0
O
mouvement prend fin !
a) Caractériser cette force ; vérifier son homogénéité ; est-elle conservative ?
Pourquoi le mouvement est-il plan ?
b) Trouver l’énergie mécanique E de la particule et comparer au cas des forces
gravitationnelles.
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
e Mé
caniq
46. Limite de Roche (*)
On cherche à déterminer la distance en dessous de laquelle une comète s’approchant
de Jupiter se sépare en plusieurs morceaux sous l’effet des forces de marée dues à
Jupiter. Pour cela, on fait les hypothèses suivantes :
– le référentiel Jupitérocentrique est galiléen, et Jupiter (masse M J , rayon RJ ) est
un astre sphérique et homogène,
– la comète de masse volumique μc est en orbite circulaire de rayon d autour de
Jupiter,
2r
– la comète est constituée de deux sphères
Jupiter uGr
identiques de masse m et de rayon r ,
•
homogènes et disposées comme indiqué
(1)
(2)
sur la figure (les trois centres restent
d
2320
:160
.179
.65.2
07:1
6929
5464
6
alignés au cours du mouvement) ; elles sont liées entre elles par leur attraction
gravitationnelle mutuelle.
a) Établir que le mouvement du centre d’inertie de la comète est uniforme, puis
déterminer l’expression de ω 2 , le carré de la vitesse angulaire du mouvement.
JG
b) On note R la réaction de la sphère de gauche (1) sur la sphère de droite (2) de la
comète. Écrire la relation fondamentale de la dynamique (ou théorème de la
résultante cinétique) pour l’une des sphères dans le référentiel Jupitérocentrique.
Est-il nécessaire de le faire pour la seconde ?
c) À quelle condition le contact entre les deux sphères est-il rompu ? En déduire,
r
sachant que
1 , que cela conduit pour d à une limite inférieure d lim et
d
d
exprimer lim en fonction de μc et μ J , masse volumique de Jupiter.
RJ
d
AN : M J = 1, 9.1027 kg ; RJ = 7,1.104 km et μc = 1, 0.103 kg.m −3 ; calculer lim .
RJ
techn
iques
:211
0428
318:
8891
47. Satellite freiné par l’atmosphère
a) Un satellite est en orbite circulaire autour de la Terre. Montrer qu’il existe alors
une relation simple entre Ec et E p , et exprimer E en fonction de r seulement.
b) En déduire le « paradoxe » du satellite freiné par sa rentrée dans l’atmosphère et
qui voit sa vitesse augmenter.
c) Son altitude est h = 180 km , et la force de frottement en norme est modélisée par
β mv 2 / h où β = 10−8 SI . Préciser l’unité de β et justifier la dépendance en 1/ h
de cette force. Déterminer l’expression de la variation d’altitude Δh après une
révolution, en considérant que sur un tour, la trajectoire reste quasiment
circulaire, ce qui conduit à faire un calcul au premier ordre : h RT .
caniq
ue e
t des
Micro
48. (MPSI) Diffusion de Rutherford
L’expérience consiste à bombarder une mince feuille d’or avec des particules α
(noyau d’hélium He 2 + ). Une particule α de masse m ≈ 4m p arrive avec une vitesse
G
v0 dont le support est distant de b (paramètre d’impact) du noyau d’or de numéro
atomique Z = 79 et de nombre de masse A = 197 .
G
v0
b
e Na
Écol
tiona
le Su
périe
ure d
e Mé
• F
G k G
a) La force sur la particule α s’écrit : f = 2 ur ; que vaut k ? Pourquoi peut-on
r
considérer que le noyau d’or est quasiment immobile en F pendant l’interaction ?
Le référentiel lié au noyau d’or est pris galiléen.
b) Pourquoi l’énergie et le moment cinétique de la particule α sont-ils constants ?
Calculer leurs valeurs en fonction de m , v0 et b .
&KDSLWUH
c) Dans un premier temps, b = 0 et le mouvement de la particule α est rectiligne.
Quelle est la distance rm minimale d’approche de la particule α au noyau d’or ?
AN : m p = 1, 67.10−27 kg , e = 1, 6.10 −19 C ; si on veut rm de l’ordre de 10 −15 m ,
6929
5464
6
dimension du noyau, quelle doit-être la vitesse v0 ?
1
d) Dans le cas b ≠ 0 , montrer que l’énergie s’écrit E = mr 2 + Veff (r ) . Étudier et
2
tracer Veff (r ) . Quand r = rm distance minimale d’approche, que vaut r ?
.65.2
07:1
Calculer rm en fonction de k , E et b . Étudier et interpréter les variations de rm
avec E et b.
:160
.179
49. Le modèle de l’atome d’hydrogène
Dans cet exercice, l’électron atomique est une particule classique (au sens non
relativiste), on lui applique donc les lois de la mécanique newtonienne.
2320
Préliminaire : la force électrique
L’électron, de charge − e et de masse m est en orbite circulaire uniforme de rayon
r1 = 53 pm autour du proton de charge + e supposé fixe en O .
318:
8891
À la force gravitationnelle entre les deux particules de masse m = 0, 91.10−30 kg et
m′ = 1,67.10−27 kg (pour le proton), il convient de rajouter la force électrique entre
:211
0428
les deux particules chargées q = − e et q′ = + e = 1,6.10−19 C (pour le proton) :
JG
qq′ G
Fe =
ur
4πε 0 r 2
ue e
t des
Micro
techn
iques
On donne ε 0 = 8,85.10−12 F.m −1 et on rappelle que G = 6, 67.10−11 N.m 2 .kg −2 .
JG
a) Rappeler les ressemblances et différences entre la force gravitationnelle F g et la
JG
force électrique F e . Calculer la norme de chacune d’entre elle puis le rapport
Fg / Fe et conclure.
Pourquoi peut-on supposer le proton immobile à l’origine des coordonnées ?
b) Toujours par analogie, indiquer l’expression de l’énergie potentielle E p de
l’électron dans le champ de force du proton.
Le modèle sans quantification
c) Calculer en fonction de r1 , İ 0 , e et m , puis numériquement, la vitesse v1 et
caniq
l’accélération a 1 de l’électron ; commentaires.
ure d
e Mé
d) Même question pour l’énergie mécanique E 1 , à exprimer d’abord en J puis en
eV ; commentaire.
e) Même question pour la période T1 du mouvement. En déduire la longueur d’onde
du rayonnement électromagnétique correspondant à cette période ; commentaire.
périe
Le modèle de Bohr avec quantification
Dans ce modèle, r1 n’est plus une donnée, en revanche plusieurs orbites
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
circulaires de rayon rn et de vitesse vn sont possibles avec une quantification du
moment cinétique du mouvement de l’électron autour du proton :
h
où h est la constante de Planck
2π
et n un nombre entier strictement positif ( n ∈ `* ).
Cette quantification a été introduite et illustrée à la question 34. du chapitre 3..
f) Justifier l’expression de la norme du moment cinétique σ = mrv et déduire de sa
quantification les expressions de vn et rn en fonction de n .
6929
5464
6
σ n = m rn vn = n = avec = =
g) Introduire ensuite v1 et r1 , les expressions de vn et rn pour n = 1 et donner vn et
.65.2
07:1
rn en fonction de v1 , r1 et n . Faire les applications numériques de v1 et r1 et les
commenter.
h) En déduire l’expression de l’énergie mécanique E n en fonction de E 1 et n ;
:160
2320
G
V0
318:
8891
d
0428
50. (MPSI) Passage d’une météorite près de la Terre (*)
On considère un modèle sphérique de Terre à
répartition sphérique de masse, de rayon
RT = 6, 4.10 3 km .
O
Dans le référentiel géocentrique galiléen, une
RT
météorite décrit, avant de pénétrer dans le champ
de gravitation terrestre, une trajectoire rectiligne,
sur une droite distante de d = 1, 0.10 4 km du
centre de la Terre, avec la vitesse V0 .
.179
donner l’expression et la valeur numérique de E 1 et la commenter.
Micro
4XHVWLRQVRXYHUWHV
techn
iques
:211
On donne g 0 = 9, 8 m.s −2 .
En utilisant la conservation de l’énergie et du moment cinétique, calculer la valeur
minimale Vm de V0 pour que la météorite ne rencontre pas la Terre.
L
périe
ure d
e Mé
caniq
ue e
t des
51. Oscillations d’un liquide dans un tube en U sous l’effet de la gravité (*)
Un tube en U de section S uniforme le long du tube
z
est rempli avec un volume d’eau sur une colonne
d’eau de longueur L . Les frottements avec les parois η
du tube sont négligés. À l’équilibre, la surface libre
z=0
du liquide, repéré par la variable η , est à l’altitude
G
g
z = 0 , dans la partie gauche du tube. À l’instant t = 0 ,
on a porté par dépression cette surface à l’altitude
z = η 0 et on lâche avec une vitesse initiale nulle.
Déterminer, la période d’oscillation du liquide et faire
l’application numérique pour L = 20 cm .
e Na
Écol
tiona
le Su
Données : Le volume de fluide est SL .
&KDSLWUH
52. Période de révolution lunaire par Télémétrie laser
Sachant qu’un faisceau laser effectue un aller-retour Terre-Lune en 2,56 s , estimer
la période de révolution de la Lune autour de la Terre.
6929
5464
6
Données autorisées : Distance de la Terre au Soleil D = 150.106 km ; rayon de la
Terre RT = 6,38 103 km ; champ de gravitation terrestre
07:1
g 0 = 9,81 m.s−2 ; âge du système solaire A = 4,5.109 années .
iques
:211
0428
318:
8891
2320
:160
.179
.65.2
53. Associations
Les courbes de réponse fréquentielle (en RSF) en amplitude et d’évolution en
régime libre pour deux oscillateurs mécaniques différents, linéaires du second ordre,
sont données ci-dessous. Associer, en justifiant sans calcul, à chacune des courbes
de réponse en fréquence le régime libre correspondant.
figure 4
e Mé
caniq
ue e
t des
Micro
techn
figure 1
figure 5
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
figure 2
6929
5464
6
07:1
.65.2
figure 3
:160
.179
figure 6
1900
•
1910
•
•
•
1940
1930
1970
1960
1950
•
1950
1920
•
1970
Micro
10′′
•
•
1990
1980
•
1960
1980 1990
0428
1930 1940
:211
•
1920
iques
1910
techn
1900
318:
8891
2320
54. (MPSI) Observation d’une étoile double
Le système double Sirius A et B est observé depuis 1860. Sur le document les
positions angulaires des deux étoiles sont représentées à différentes dates. Il s’agit
des positions dans le référentiel de Copernic, donc corrigées du mouvement de la
Terre, lieu de l’observation. G désigne leur centre de masse.
•
2000
2010
•
2000
•
2010
trajectoire de G
Sirius A
Sirius B
ure d
e Mé
caniq
ue e
t des
Interpréter et exploiter quantitativement le document.
La distance de la Terre au système double (déduite de la parallaxe) est
d = 8, 6 années-lumière , la figure permet-elle a priori, de déterminer directement les
demi-grands axes des ellipses décrites par les deux étoiles autour de G ?
Les mesures, corrigées de l’inclinaison du plan orbital, donnent pour les demigrands axes des ellipses, décrites par les deux étoiles, les valeurs angulaires 4,9′′ et
2,3′′ .
Déterminer les masses des deux étoiles du système Sirius en fonction de la masse du
Soleil.
e Na
Écol
tiona
le Su
périe
Données :
1 année-lumière ≈ 1016 m ; distance moyenne Terre-Soleil a 0 = 1 U.A. = 1,5 1011 m .
&KDSLWUH
.179
.65.2
07:1
6929
5464
6
55. Évolution d’un système de deux étoiles à neutrons
Deux astres M 1 et M 2 de même masse m , en interaction gravitationnelle, ont un
mouvement circulaire autour de leur centre de masse ; le système est isolé et son
centre de masse G est fixe dans le référentiel considéré.
Déterminer l’expression de la fréquence de rotation des astres en fonction de leur
distance relative d .
Lorsque les deux astres sont des étoiles à neutrons (*), des ondes gravitationnelles
sont émises avec une fréquence double (pourquoi ?) de la fréquence précédente ; ces
ondes transportent de l’énergie, donc le système des deux astres perd de l’énergie
mécanique en émettant ces ondes. Justifier l’évolution de la distance d au cours du
temps. En déduire celle de la fréquence des ondes gravitationnelles émises.
Décrire qualitativement l’évolution du système formé par les deux astres.
8891
2320
:160
(*) Une étoile à neutrons est un astre ultra-dense, de la masse de quelques Soleil
pour un diamètre de l’ordre de 20 à 30 km seulement, principalement composé de
neutrons, maintenus ensemble par les forces de gravitation, et résultant de
l’explosion d’une étoile plus massive quand celle-ci a épuisé son combustible
nucléaire.
techn
iques
:211
0428
318:
k G
56. (MPSI) Nature des trajectoires dans un champ de force en − 7 ur ( k > 0 ) (*)
r
Le centre attracteur est fixe en O , et le mobile M de
G
masse m est lancé depuis l’infini avec un paramètre
v0 M
d’impact b fixe et une vitesse v0 variable d’une
×
b
expérience à l’autre. Discuter qualitativement de la
•
nature des trajectoires en fonction de l’énergie
mécanique E en faisant coïncider l’étude graphique et la O
réflexion physique.
ue e
t des
Micro
57. Station Spatiale Internationale (ISS) (*)
L’assemblage de la station a débuté en 1998, ses dimensions actuelles sont de
110 m x 74 m x 30 m. Pour assurer le ravitaillement et rehausser son orbite, se
relaient des vaisseaux russes (cargos Progress), européens (ATV), américains
(Dragon de SpaceX) et japonais (HTV). Le transport des équipages est assuré par
des vaisseaux russes Soyouz.
On s’intéresse ici à l’orbite de l’ISS.
caniq
Données :
constante de gravitation universelle G = 6, 67 10 −11 kg −1.m 3 .s −2 ,
e Mé
masse de la Terre M T = 5,98 10 24 kg ,
ure d
masse de la station M S = 4, 0 10 5 kg ,
rayon de la Terre RT = 6380 km (modèle sphérique),
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
période de rotation de la Terre sur elle-même (jour sidéral) TT = 86164 s ,
Paris : latitude 48°52’ Nord, longitude 2°10’ Est,
New York : latitude 40°45’ Nord, longitude 74° Ouest.
On travaille dans le référentiel géocentrique.
07:1
6929
5464
6
Le document représente la projection (suivant la verticale) sur la sphère terrestre de
quelques orbites successives de l’ISS, que l’on considère comme circulaires. En
déduire des valeurs approchées :
Ź de l’inclinaison du plan orbital de la station sur le plan équatorial,
Ź de la période (ne pas oublier que la Terre tourne dans le référentiel
géocentrique),
Ź du rayon de l’orbite et de l’altitude de la station.
.179
.65.2
Sur le site de l’ESA il est possible de suivre en temps réel la position de l’ISS :
http://www.esa.int/Our_Activities/Human_Spaceflight/International_Space_Station/
Where_is_the_International_Space_Station
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0428
318:
8891
2320
:160
Page suivante : Projections d’orbites successives de l’ISS.
Les villes de Paris et New York sont repérées par des pointillés.
&KDSLWUH
ue e
t des
caniq
e Mé
ure d
périe
le Su
tiona
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
318:
0428
:211
iques
techn
Micro
:160
2320
8891
.179
.65.2
07:1
6929
5464
6
7UDYDX[SUDWLTXHV
cm
t
s
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0428
318:
8891
z
2320
:160
.179
.65.2
07:1
6929
5464
6
58. On réalise des expériences pour étudier les mouvements, suivant l’axe
A
vertical, d’une masse m accrochée à un ressort vertical. z = 0
correspond à la position d’équilibre. On donne m = 200 g .
La masse est plongée dans de l’eau et subit une force de frottement
G
fluide modélisé par une force de type −λ v . L’extrémité A est fixe
(figure 1). L’enregistrement des positions z (t ) de la masse m au cours
du temps, après l’avoir écartée de sa position d’équilibre et lâchée avec
une vitesse initiale nulle (régime libre), conduit au graphe ci-après.
a) Montrer que la décroissance des valeurs maximales de z (t ) est
exponentielle et déterminer et le coefficient ω 0 / Q = λ m . En
déduire la valeur de λ .
figure 1
b) Déterminer graphiquement la pseudopériode et en déduire le
décrément logarithmique et la valeur de la constante de raideur k du ressort.
e Na
Écol
tiona
le Su
périe
ure d
59. Pour étudier un mouvement à force centrale, on utilise un mobile autoporteur
(frottements de glissement négligeables) se déplaçant sur une table horizontale. Ce
mobile est accroché à un ressort dont l’autre extrémité est reliée à un point fixe O du
référentiel terrestre. Un dispositif repère la position du centre de masse du mobile
toutes les 20 ms . On obtient l’enregistrement ci-dessous, à tout instant le ressort est
tendu.
&KDSLWUH
6929
5464
6
07:1
.65.2
.179
O
2320
:160
10 cm
0428
318:
8891
a) Montrer que la loi des aires est expérimentalement vérifiée, prendre des
intervalles de temps de 80 ms ; donner la valeur de la constante des aires.
b) Construire en un point de la trajectoire le vecteur accélération moyen (sur une
JJJJG
durée de 80 ms ) et comparer sa direction à celle du vecteur OM .
•
Io
Ganymède
•
•
•
Micro
J
Callisto
techn
Europe
iques
:211
60. Mesure de la masse de Jupiter par l’observation de ses satellites
Le but est de déterminer la masse de Jupiter à partir de l’observation des positions
relatives au cours du temps de ses quatre satellites les plus brillants (satellites
galiléens).
e Mé
caniq
ue e
t des
Les documents de travail sont tirés de photos prises à huit instants différents et
permettent de déterminer le rayon a de l’orbite, considérée comme circulaire, du
satellite et sa période T. Pour convertir l’écart angulaire visible sur la photo en
distance, il faut connaître la distance Jupiter-Terre au moment de l’observation, ici
d = 4,46 U.A..
G MJ
a3
permet
La troisième loi de Kepler, avec l’hypothèse M sat M J : 2 ≈
4π2
T
alors de déterminer la masse de Jupiter.
α
Terre
périe
x
ure d
Orbite satellite
J
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
d
0428
318:
8891
2320
:160
.179
.65.2
07:1
6929
5464
6
Le graphe ci-dessous donne la distance du satellite Io au centre de Jupiter au cours
du temps. La détermination de a et T est faite à partir de cette portion de courbe,
théoriquement sinusoïdale pour une trajectoire circulaire uniforme du satellite.
iques
:211
Déterminer graphiquement a et T. Pour la période, prendre deux positions de part et
d’autre de l’élongation maximale et traduire la proportionnalité entre l’angle au
centre, parcouru par le satellite, et la durée. Déterminer la masse de Jupiter.
1.700
1.615
1.875
1.677
2.176
2.025
1.805
1.780
2.131
2.040
2.068
2.185
2.152
2.221
1.860
2.333
1.801 2.182 1.989 2.178 1.632
1.865 1.909 1.943 1.650 1.872
1.609 1.896 1.754 1.716 2.026
2.078
ue e
t des
1.732
2.236
2.047
1.902
Micro
techn
Cette mesure isolée est très imprécise. Ci-dessous, des mesures faites par 36
personnes différentes à partir du même document et avec le même protocole. La
masse de Jupiter est en 10 27 kg :
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
Faire un traitement statistique et donner un encadrement de la masse de Jupiter en
supposant l’absence d’erreurs systématiques.
&KDSLWUH
6907
3955
8
5pSRQVHVDX[TXHVWLRQV
/HFRXUVG·DERUG
33.1
91:1
2VFLOODWHXUVDPRUWLV
2320
:105
.71.1
1. La relation fondamentale de la dynamique appliquée à la masse m dans le
référentiel terrestre ( R ) supposé galiléen est, en l’absence de frottement solide :
G
G
G
G G
ma ( M )( R ) = − k xu x − λ v + mg + Rn
G
La réaction Rn est orthogonale à Ox , les frottements sont déjà pris en compte,
G
G
G
Rn = Ry u y + Rz u z
318:
λ
m x = − k x − λ x
x+
ω0
Q
:211
k
et
= , il vient l’équation classique :
Q m
m
x + ω 20 x = 0
iques
en posant ω 20 =
ω0
0428
d’où en projection sur Ox :
8891
z = 0 R z = mg ,
Suivant la verticale ascendante, et suivant Oy , y = 0 R y = 0 ,
e Mé
d
( Ec + E p ) = − λv 2 < 0
dt
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
Il apparaît que la force de frottement à travers sa puissance est responsable de la
diminution de l’énergie mécanique E = Ec + E p de l’oscillateur (système non
conservatif).
Les correspondances sont les suivantes : m → L , k → 1/ C et λ → R et pour les
grandeurs temporelles : x (t ) → q (t ) et v(t ) = x (t ) → i (t ) = q (t ) .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
Micro
techn
Q est le facteur de qualité, inversement proportionnel à l’amortissement et ω0 est la
pulsation propre de l’oscillateur.
dx
les deux membres de l’équation écrite sous la forme
En multipliant par v =
dt
dv
m + kx + λv = 0
dt
d §1 2· d §1 2·
2
il vient
¨ mv ¸ + ¨ kx ¸ + λv = 0 , soit
dt © 2
¹ dt © 2
¹
ω0
x + ω 20 x = 0 , se référer au
Q
chapitre 0, Équations différentielles II-3.a) et à la question 31. du chapitre 4.
§ 1
·
− 1¸ , d’où les trois
Le discriminant de l’équation caractéristique est Δ = 4 ω 20 ¨
2
© 4Q
¹
régimes suivant les valeurs de Δ :
6907
3955
8
2. Pour la résolution de l’équation différentielle : x+
1
.
2
L’équation caractéristique admet deux racines réelles négatives ( P = ω 20 > 0 et
91:1
* le régime apériodique, Δ > 0 , correspond à un fort amortissement, Q <
33.1
ω0
< 0 ) notées −γ et − β avec γ > 0 et β > 0 ; la solution est une somme
Q
de deux exponentielles décroissantes : x (t ) = A e − γ t + B e − β t et la traduction des
conditions initiales conduit à :
2320
x0
( β e− γ t − γ e− β t )
β −γ
8891
x (t ) =
:105
.71.1
S=−
0428
318:
Cette solution décrit un retour à l’équilibre en décroissance exponentielle sans
oscillations (graphe de gauche). Le portrait de phase (graphe de droite) indique
bien cette décroissance monotone pour l’élongation, avec une vitesse négative qui,
en norme, commence par croître, puis décroît.
x0
:211
x
x
x0
x
Micro
techn
iques
0
ue e
t des
t
0
1
.
2
L’équation caractéristique admet une racine double −ω 0 ; la solution est :
−ω 0 t
et la traduction des conditions initiales conduit à :
e Mé
x (t ) = ( A + Bt ) e
caniq
* le régime apériodique critique, Δ = 0 , soit Q =
−ω 0 t
ure d
x (t ) = x0 (1 + ω0t ) e
périe
Cette solution décrit également un retour à l’équilibre sans oscillations (on a
toujours x(t ) > 0 ), mais s’effectuant plus rapidement que précédemment.
e Na
Écol
tiona
le Su
* le régime pseudopériodique, Δ < 0 , correspond à un faible amortissement, Q >
1
,
2
&KDSLWUH
−
x (t ) = ( A cos ω t + B sin ω t ) e
conditions initiales conduit à
ω0
2Q
t
ou x (t ) = C cos(ω t − ϕ ) e
ω0
−
2Q
6907
3955
8
L’équation caractéristique admet deux racines complexes conjuguées à partie
ω0
1
± j ω , avec ω = −Δ / 2 = ω 0 1 −
réelle négative : −
2Q
4 Q2
La solution s’écrit indifféremment :
t
et la traduction des
ω0
33.1
91:1
ω
§
· − t
x (t ) = x0 ¨ cos ω t + 0 sin ω t ¸ e 2 Q
2 Qω
©
¹
.71.1
Cette solution décrit un retour à l’équilibre avec oscillations de part et d’autre de
x = 0 ; l’enveloppe de la courbe décroît de manière exponentielle, et la courbe
2π
admet pour pseudopériode T =
. L’aspect en forme de spirale du portrait de
:105
ω
2320
phase indique bien ce caractère pseudopériodique avec une réduction progressive
de l’amplitude et de la vitesse.
8891
x
x0
318:
x
0
:211
0428
xn
xn +1
x
iques
t
x0
Micro
techn
T
ue e
t des
NB : Sur la courbe de gauche, les extrema de x(t ) ne sont pas sur les courbes
enveloppes, même si à cette échelle cela semble être le cas.
ω
0
T
xn
= ln e 2 Q
xn +1
e Mé
soit δ = ln
δ =
ω0
2Q
T
le Su
périe
ure d
Il résulte de la définition de ω , la relation entre la pseudopériode T et la période
§
1 ·
propre T0 : T 2 ¨ 1 −
= T02 T 2 = T02 + T 2 / 4Q 2 .
2 ¸
4
Q
©
¹
d’où avec δ la relation cherchée, dans laquelle δ dépend de T :
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
T 2 / T02 = 1 + δ 2 / 4π 2
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
3. Dans le cas du régime pseudopériodique, l’amplitude maximale décroît de façon
exponentielle et le décrément logarithmique δ est le logarithme népérien du rapport
de deux amplitudes maximales successives (intervalle de temps T ),
En cas de faible amortissement, Q 1 (soit δ 1 ), on a T ≈ T0 bien que T soit
toujours légèrement supérieure à T0 (avec frottement, le mobile met un temps plus
long…) et la relation approchée est T ≈ T0 (1 + 1 / 8 Q 2 ) .
6907
3955
8
En réalité ce résultat reste vrai même en cas d’amortissement assez important : si
xn +1 = xn / 3 , δ = ln 3 ≈ 1,10 et T / T0 ≈ 1, 02 …
4. Dans le cas d’un très faible amortissement, Q 1 , et donc ω ≈ ω 0 , d’où :
ω0
ω0
ω0
−
ω0
.71.1
x (t ) = x0 ( −ω 0 sin ω 0 t −
33.1
91:1
−
t
ω
§
· − t
x (t ) = x0 ¨ cos ω t + 0 sin ω t ¸ e 2 Q ≈ x0 cos ω 0 t e 2 Q
2 Qω
©
¹
en négligeant le terme en 1/ 2Q , et de même pour
−
t
ω0
cos ω 0 t )e 2 Q ≈ − x0ω 0 sin ω 0 t e 2 Q
t
ω0
318:
−
t
1
Em (t ) = Ec (t ) + E p (t ) = mx02ω 20e Q
2
8891
2320
:105
2Q
(ceci revient à négliger les variations lentes de l’exponentielle devant les variations
rapides de la sinusoïde).
Alors l’énergie mécanique donne :
−
0428
L’énergie mécanique décroît au cours du temps, approximativement en e
techn
Em
ω 0T
ΔEm
Q = 2π
Q
car
t
.
ω0
Q
T1
Em
ΔE m
Micro
d’où Q =
iques
:211
L’énergie dissipée sur une pseudopériode est :
ω0
ω
− 0 T ·
1 2 2 − Q t§
ω
Q
ΔEm = Em (t ) − Em (t + T ) = mx0 ω 0 e
¨¨ 1 − e
¸¸ ≈ Em (t ) × 0 T
2
Q
©
¹
ω0
caniq
2VFLOODWHXUVHQUpJLPHVLQXVRwGDOIRUFp
ue e
t des
Il apparaît donc que plus le coefficient de frottement λ est faible, plus le facteur de
qualité est élevé, et plus la puissance mécanique perdue (énergie perdue sur une
période) est faible. La durée du régime transitoire (libre ici) est alors grande, ce qui
est conforme à l’étude faite avec le RLC série au chapitre 4.
le Su
tiona
e Na
Écol
équilibre
l0
x
xA
périe
ure d
e Mé
5. La masse m est reliée à un ressort dont l’autre
extrémité est A. On impose au point A des oscillations
sinusoïdale : x A = a cos ( ω t ) .
La force exercée par le ressort sur m est :
G
G
G
f = − k (l − l 0 ) u x = − k (l 0 + x − x A − l 0 ) u x
G
G
f = −k ( x − x A ) u x
G
G
G
f = − k x u x + k a cos(ω t ) u x
x
m
•
A
l
A
m x
•
date t quelconque
&KDSLWUH
En plus de la force de rappel élastique, il s’exerce sur m un terme excitateur
sinusoïdal d’amplitude constante.
1
1
1
1
mx 2 + k x 2 = mω 2 X m2 sin 2 ( ω t − ϕ ) + k X m2 cos 2 ( ω t − ϕ )
2
2
2
2
=
318:
= Pexc + Pf
1 T ′ dE
1
dt =
( E (T ′) − E (0) ) = 0 ,
³
0
′
T
dt
T′
0428
or
dE
dt
dE
dt
Pexc = − Pf
iques
et donc
:211
Soit en moyenne :
dE = ( Pexc + Pf ) dt
8891
Le bilan est :
2320
et Pf = −λ v 2 puissance de la force de frottement
33.1
L’équation différentielle est : mx + λ x + kx = Fexc
et en multipliant par x dt on obtient le bilan de puissance :
§1
·
§1
·
d ¨ mx 2 ¸ + d ¨ k x 2 ¸ = Fexc v dt − λ x 2 dt
2
2
©
¹
©
¹
avec Pexc = Fexc v puissance de la force excitatrice
91:1
1
k + mω 2 ) X m2
(
4
.71.1
E =
:105
et E =
6907
3955
8
6. En RSF de pulsation ω : x = X m cos ( ω t − ϕ )
techn
&KDPSGHJUDYLWDWLRQ
ue e
t des
Micro
7. Deux masses ponctuelles m1 et m 2 interagissent par une force gravitationnelle (loi
de Newton). La force exercée par m1 sur m 2 est :
G
mm G
f 12 = − G 1 2 2 u12
r
G
où r est la distance entre les deux points et u12 un vecteur unitaire dirigé de m1 vers
Le champ gravitationnel créé par m1 , placée au centre d’un système de coordonnées
e Mé
sphériques, au point où se trouve m 2 est
ure d
G
m G
A = − G 21 u r
r
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
À proximité d’un astre, le considérer comme une masse ponctuelle n’a évidemment
aucun sens, la loi de Newton ne s’applique pas. Il existe cependant un résultat
simple (admis ici), concernant un modèle d’astre sphérique et plus précisément à
répartition de masse à symétrie sphérique (c’est-à-dire que sa masse volumique
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
m 2 . La constante G vaut 6,67.10 −11 N.m 2 .kg −2 (ou encore en kg −1.m 3.s −2 ).
ρ = ρ (r ) est indépendante de θ et ϕ ). Dans ce cas, le champ gravitationnel créé
6907
3955
8
par l’astre en un point extérieur est le même que celui qui serait créé par une masse
ponctuelle (de même masse que l’astre) et placée au centre du modèle sphérique.
Par exemple le champ créé par un modèle sphérique de Terre (de masse M T ) à
répartition sphérique de masse en un point extérieur est :
G
M G
A = − G 2T u r
r
33.1
91:1
8. Le référentiel de Copernic (C ) a pour origine le
centre de masse S du système solaire (soit (C )
pratiquement le centre du Soleil ce qui le rend très
S
proche du référentiel de Kepler) et possède trois
( R)
axes fixes dans des directions d’étoiles lointaines ; il
est considéré comme galiléen.
•
Le référentiel géocentrique a pour origine le centre
T
de la Terre et ses axes sont parallèles à ceux de
(C ) ; il n’est pas tout à fait galiléen car le centre de la Terre n’a pas un mouvement
rectiligne uniforme.
Le référentiel terrestre ( R ) est rigidement attaché à la Terre (il tourne avec elle) ; il
n’est qu’approximativement galiléen.
Le mouvement de ( R ) par rapport à (C ) est composé :
Ź d’une translation circulaire (ou presque) décrivant la révolution de la Terre autour
du Soleil,
Ź d’une rotation décrivant la rotation de la Terre sur elle-même autour de l’axe des
pôles.
iques
:211
0428
318:
8891
2320
:105
.71.1
•
MT
= 9, 8 m.s −2 , on trouve une valeur très
RT2
voisine du champ de pesanteur car le champ de gravitation terrestre est la principale
composante du champ de pesanteur,
Micro
g 0 RT2 = G M T
ue e
t des
soit
techn
9. Au niveau du sol : r = RT et A0 = G
caniq
Confondre champ de pesanteur et champ de gravitation revient en fait à considérer
le référentiel terrestre comme galiléen.
La force de gravitation, toujours avec le modèle sphérique, est un champ de force,
elle dérive d’une énergie potentielle car :
JJJJG
GM T m G
GM T m
u r . d OM = −
dr ,
δW = −
2
r
r2
GM T m
GM T m
dE P = +
dr E P = −
+ cste ,
r2
r
on choisit E P = 0 pour r → ∞ :
)
GM T m
r
e Na
Écol
tiona
le Su
EP = −
périe
ure d
e Mé
(
&KDSLWUH
v ≥ v lib =
GM T
=
RT
2
2 g 0 RT
33.1
1
GM T m
mv 2 −
≥0
2
RT
91:1
6907
3955
8
La vitesse de libération correspond à la vitesse avec laquelle il faut lancer, dans le
référentiel géocentrique, le point de masse m pour qu’il échappe à l’attraction
terrestre. Ce problème se traite avec l’énergie.
1
GM T m
Système conservatif :
mv 2 −
= E = cste ; pour avoir r → ∞ il faut :
2
r
1
E = m v ∞2 ≥ 0 . La condition de libération est : E ≥ 0
2
À partir d’un point de lancement proche de la Terre : r ≈ RT
.71.1
AN : Pour la Terre : v lib = 11, 2 km.s −1 ; pour la Lune, g 0 L = 1, 6 m.s −2 et
8891
2320
:105
R L = 1, 75.10 6 m , ce qui donne v lib = 2, 4 km.s −1 . Ces valeurs sont à
comparer aux vitesses des molécules d’un gaz à température ordinaire, de
l’ordre de 0,5 à 1 km.s −1 . La Lune n’a pas pu garder une atmosphère,
l’évasion pour l’atmosphère terrestre est moindre et il y a un renouvellement
par l’activité volcanique.
Tsm
B
A′
Tsid
et qui donne la vitesse de rotation
JG
JG
ω ( R ) /(C ) notée ici Ω avec
2π
Ω=
= 7, 3.10−5 rad.s −1 .
Tsid
iques
:211
0428
318:
10. ( R ) décrit un tour complet sur luimême lorsque A passe en A′ : ceci
définit le jour sidéral de durée
Tsid = 23 h 56 min 04 s = 86 164 s
techn
S•
Soleil
A
t =0
Terre
passages successifs du Soleil au méridien.
e Mé
caniq
En effet l’angle supplémentaire de rotation, sur un jour solaire, se retrouve au
ASB et au bout d’un an la somme des angles de type n
ASB vaut 2 π ,
centre : c’est n
donc en 365,25 jours solaires la Terre a effectué 366,25 tours sur elle-même :
365, 25
Tsid = Tsm
. AN : Tsm = 86 400 s Tsid = 86 164 s .
366, 25
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
La différence de 3 min 56 s par jour cumulée sur une année redonne…un jour
entier ; c’est ce décalage du ciel qu’observe l’astronome d’une nuit au lendemain
(points opposés à A et B ).
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
Et donc, à cause de la translation circulaire de vitesse angulaire ω , il n’est pas
encore tout à fait midi dans la situation A′ . Le jour solaire moyen de durée
Tsm = 24 h = 86 400 s s’écoule lorsque A passe en B , c’est-à-dire entre deux
1
1
1
=
+
Tsid Tsm A
Tsid =
soit
6907
3955
8
Autre méthode : soit ( R′) le référentiel d’origine S et tournant par rapport à (C ) de
telle manière que ST soit l’un de ses axes ; sa période de rotation est l’année
A = 365, 25 Tsm . Alors, par addition des vitesses angulaires :
JG
JG
JG
ω ( R ) /(C ) = ω ( R ) /( R′) + ω ( R′) /(C ) , et en supposant les vecteurs parallèles et de même sens :
Tsm
1 + Tsm / A
33.1
91:1
Cette formule qui montre bien que l’écart entre le jour sidéral et le jour solaire
moyen réside dans le rapport Tsm / A = 1/ 365, 25 , soit un jour dans l’année.
.71.1
)RUFHVFHQWUDOHVFRQVHUYDWLYHV
8891
2320
:105
11. Par définition du centre de masse :
JJJJJG
JJJJJG G
JJJJJG
m JJJJJG G
M GM 1 + m GM 2 = 0 GM 1 = −
GM 2 ≈ 0 si m M , l’astre de masse
M
M reste quasiment immobile en G. C’est le cas pour l’interaction entre le Soleil et
une planète ou entre la Terre et un satellite artificiel.
:211
0428
318:
G
G
mm G
mM G
12. Interaction gravitationnelle : f 2 = − G 1 2 2 u12 devient f = − G 2 u r , en
r
r
plaçant M m , au centre d’un système de coordonnées sphériques.
G
G
q1q 2 G
q1q 2 G
u12 devient f =
Interaction électrostatique : f 2 =
ur
2
4π ε 0 r
4π ε 0 r 2
techn
iques
Les deux forces sont newtoniennes, elles varient en 1 r 2 , la force gravitationnelle
est toujours attractive alors que la force électrostatique peut être attractive
( q1q 2 < 0 ) ou répulsive ( q1q 2 > 0 ).
ure d
e Mé
caniq
ue e
t des
Micro
13. Le théorème du moment cinétique appliqué en O au point M de masse m s’écrit
dans ( R ) :
G
JJJJG JG
§ dσ O ( R ) ·
G
G G
¨
¸ = OM ∧ f = r ur ∧ f (r ) ur = 0
© dt ¹( R )
puisque la force est colinéaire au rayon vecteur.
JJJJG
G
G
Le moment cinétique σ O ( R ) = OM ∧ mv ( M )( R ) est donc une constante du
mouvement, c’est-à-dire qu’au cours du temps, il garde une direction fixe et une
G JJJJG
G
norme constante. Or σ O ( R ) est orthogonal au vecteur position r = OM qui ne peut
donc qu’appartenir à un plan passant par O ; on en déduit que la trajectoire est ici
G JJJJG
G
plane, dans le plan contenant O et v0 (et même rectiligne si r = OM est colinéaire
G
à v ( M )( R ) ).
e Na
Écol
tiona
le Su
périe
Il est alors plus commode de travailler en coordonnées cylindriques ( r , θ , z = 0)
G
G
avec u z dirigé suivant σ O ( R ) , ce qui revient à prendre la trajectoire dans le plan
G G
(O , ur , uθ ) .
&KDSLWUH
G
G
G
G
G
r + rθuθ )
14. Alors le moment cinétique vaut σ O ( R ) = rur ∧ m(ru
G
σ O ( R ) = mr 2θ uz
6907
3955
8
Reste à exploiter que sa norme est constante, ce qui conduit à l’expression de la
constante des aires :
C = r 2θ
91:1
alors que de manière générale r (t ) et θ (t ) sont des fonctions du temps. À noter que
θ est de signe constant : M tourne toujours dans le même sens autour de O. On
choisit alors évidemment θ ≥ 0 .
:211
0428
318:
8891
2320
:105
.71.1
33.1
Pendant l’intervalle de temps dt , le point M se
déplace en M ′ : r s’accroît de dr et le rayon
rdθ N • M ′
vecteur balaye un secteur d’angle dθ . L’aire
balayée OMM ′ est à un terme du second ordre près
•M
r
égale à celle du triangle OMM ′ (en confondant l’arc
θ
q′ et la corde MM ′ ). D’après l’interprétation
MM
O
géométrique du produit vectoriel :
JJJJG
1 JJJJG JJJJJG
1 JJJJG
1 JJJJG G
δ S ≈ OM ∧ MM ′ = OM ∧ dOM = OM ∧ vdt , donc dS étant la
2
2
2
valeur approchée au premier ordre de δ S :
1 JJJJG G
1 σ0
1
dS =
OM ∧ vdt =
dt = C dt
2
2 m
2
Il apparaît donc que la surface balayée par unité de temps par le rayon vecteur est :
iques
dS C 1 2 = = rθ
dt 2 2
techn
Elle est constante au cours du temps (loi des aires) et appelée vitesse aréolaire.
C est appelée constante des aires. On a évidemment :
Micro
σ
C =
m
ure d
e Mé
Il est possible de retrouver la constante C à partir de l’accélération : pour un
mouvement à accélération centrale, l’accélération orthoradiale est nulle :
1 d 2
aθ = 2rθ + rθ =
(r θ ) ; aθ = 0 r 2θ = C , constante des aires.
r dt
périe
JG
G
15. La force centrale conservative f = f (r ) ur dérive d’une énergie potentielle E p ( r )
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
(c’est l’énergie potentielle d’interaction) donnée par f (r ) = −
dE p
dr
.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
Quelques conséquences (pour un mouvement non rectiligne) : plus le mobile M
s’approche de O , plus sa vitesse angulaire augmente ; si θ tend vers une valeur
fixée, alors la trajectoire présente une direction asymptotique ( θ → 0 ⇔ r → ∞ ).
Un mouvement circulaire peut être à accélération centrale s’il est uniforme.
6907
3955
8
G
mM G
GMm
interaction gravitationnelle : f = − G 2 u r et E P = −
r
r
G
q1q 2 G
q1q 2
u r et E P =
interaction électrostatique : f =
4π ε 0 r 2
4π ε 0 r
Dans les deux cas on a choisi E P = 0 pour r → ∞
Le système est conservatif E = E C + E P et comme le mouvement est plan :
1
m( r2 + r 2θ 2 ) + E p ( r ) = cste
2
91:1
E=
.71.1
33.1
Rappelons que l’intérêt de « l’intégrale première » du mouvement est de ne plus
faire intervenir que des dérivées premières (et non plus secondes) de r et θ .
:105
0RXYHPHQWVGDQVXQFKDPSJUDYLWDWLRQQHO
σ2
2 mr 2
techn
Veff ( r ) = E p ( r ) +
iques
:211
0428
318:
8891
2320
16. La méthode suivante s’applique à toute force centrale conservative puisqu’elle
traduit simultanément les deux constantes du mouvement (énergie mécanique et
moment cinétique).
L’énergie mécanique du système conservatif est (question 15.) :
1
E = m(r 2 + r 2θ 2 ) + E p (r )
2
2 La loi des aires C = r θ ou σ = mr 2θ permet d’y éliminer θ :
1
σ2
1
E = mr 2 +
+ E p (r ) = mr 2 + Veff (r )
2
2 mr 2
2
Cette relation définit une énergie potentielle effective :
Veff ( r ) = −
caniq
l’énergie potentielle effective devient :
ue e
t des
Micro
limitant le problème à l’étude du mouvement radial. Il s’agit d’une nouvelle
réduction, le problème se ramène à un problème à un paramètre. On conduit une
étude énergétique classique comme à la question 29. du chapitre 6.
GmM
Cas particulier des forces gravitationnelles où E p (r ) = −
;
r
GmM
σ2
+
2 mr 2
r
e Mé
Le graphe de Veff (r ) est donné ci-dessous : on y distingue une compétition entre le
ure d
terme gravitationnel attractif (en −α / r , cuvette de potentiel) et le terme répulsif (en
+ β / r 2 , barrière de potentiel).
tiona
e Na
1 2
mr + Veff (r ) , r = 0 (la vitesse de M est alors orthoradiale).
2
Écol
donne d’après E =
le Su
périe
E est l’énergie du point M (indépendante de r ), donc représentée par une droite
parallèle à l’axe Or sur la figure ci-dessous ; son intersection avec la courbe Veff ,
&KDSLWUH
Veff (r )
E1
O rm
6907
3955
8
β / r2
r2
r1 r0
r
E2
−α / r
.71.1
33.1
91:1
E3
On distingue ainsi :
2320
:105
– les états de diffusion ( E ≥ 0) : le point M peut s’approcher de O jusqu’à une
distance minimale rm comme indiqué sur la figure pour E = E1 > 0 , puis repartir à
318:
8891
l’infini avec v ∞ ≠ 0 (la trajectoire correspondante, non établie ici, est une
hyperbole).
De même dans le cas limite E = 0 avec v ∞ = 0 , c’est la plus petite énergie pour
la libération (la trajectoire est une parabole).
:211
0428
– les états liés ( E < 0) : le point M reste à distance finie de O ; dans le cas
E = E2 < 0 , la trajectoire est comprise entre deux cercles, r oscille entre une
distance minimale r1 et une distance maximale r2 . La trajectoire correspondante,
techn
iques
non établie ici, est une ellipse dont O est un foyer, r1 correspond au périgée et r2
à l’apogée. On remarque que pour les valeurs r1 et r2 de r : Veff = E donc r = 0
Micro
et la vitesse est orthoradiale.
Dans le cas particulier E = E3 < 0 , une seule valeur de r est permise, la trajectoire
est circulaire de rayon r0 .
e Mé
v2
mM
dv
= −G 2
(1) et
= 0 (2)
r0
r0
dt
La relation (2) indique que la vitesse (en norme) doit être constante au cours du
temps, le mouvement du corps est un mouvement circulaire uniforme,
conformément à la loi des aires. La relation (1) impose la valeur de v :
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
−m
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
ue e
t des
17. L’accélération dans le référentiel ( R) galiléen pour un mouvement circulaire est, en
projection sur la base polaire, avec le pôle au centre du cercle :
v 2 G dv G
G
G
G
a ( M )( R ) = −rθ 2 ur + rθuθ = − ur + uθ
r
dt
G
G
La projection de la RFD ma ( M )( R ) = f (r ) ur sur la base locale donne :
(1)
σ2
2 mr
+
2
1 2
σ2
GM m
mr +
−
, les solutions de r = 0
2
r
2
2 mr
GM m
=0
r
r2 +
GM m
σ2
=0
r−
2 mE
E
:105
vérifient donc : E −
GM m
2 r0
91:1
18. D’après la question 16. : E =
E =−
6907
3955
8
GM m GM m
−
r0
2 r0
33.1
E =
1
GM T m
m v2 −
, et pour un mouvement circulaire :
r
2
.71.1
L’énergie est E = E C + E P =
GM
r0
v( r0 ) =
318:
8891
2320
Attention ici E < 0 , l’équation admet deux solutions positives dont la somme est
GM m
rmin + rmax = −
, or en admettant que la trajectoire soit une ellipse :
E
GM m
rmin + rmax = 2 a E = −
2a
:211
0428
on retrouve l’expression obtenue pour la trajectoire circulaire, en remplaçant r0 par
le demi-grand axe a.
iques
$SSOLFDWLRQVDX[SODQqWHVHWVDWHOOLWHV
caniq
ue e
t des
Micro
techn
19. On reprend les calculs de question 17.
a) La vitesse dans le référentiel géocentrique ( R ) galiléen pour un mouvement
circulaire est :
GM T
v(r0 ) =
r0
2π r0
La vitesse est constante donc la période est T =
, soit en remplaçant v :
v
2π r03/2
T ( r0 ) =
GM T
e Mé
Ce résultat important est plus souvent donné sous la forme
T2
4π 2
=
r03 GM T
, qui
ure d
n’est autre que la 3e loi de Kepler (rapport indépendant de m ).
périe
Plus un satellite est en orbite basse, plus il va vite et moins il met de temps pour
faire un tour. Pour un satellite en orbite basse, on prend r0 ≈ RT , car l’altitude z
e Na
Écol
tiona
le Su
est de l’ordre de 300 à 400 km, très petite devant RT :
&KDSLWUH
alors v =
G MT
= g 0 RT = 7, 9 km.s −1
RT
et T = 5 050 s ≈ 1h 24min .
Ces ordres de grandeur sont à retenir, la vitesse en orbite basse, 8 km.s −1 (environ
6907
3955
8
30 000 km.h −1 !) est à comparer avec la vitesse de libération (à partir d’une orbite
basse) : 11, 2 km.s −1 , elle est bien inférieure. On peut aussi la comparer à la
.71.1
33.1
91:1
vitesse moyenne des molécules de l’atmosphère de l’ordre de 1 km.s −1 .
La période (1 h 30 min ) est assez petite devant la période de rotation de la Terre,
c’est donc aussi l’ordre de grandeur de la période observable dans le référentiel
terrestre. Cela est facilement visible, la nuit, lorsque les panneaux solaires d’un
satellite renvoient la lumière et le rendent visible quelques instants, permettant
ainsi d’apprécier sa grande vitesse de déplacement.
318:
8891
2320
:105
b) Un satellite géostationnaire est un satellite qui reste au méridien d’un même lieu
(ce qui est utile pour les transmissions hertziennes) et semble donc immobile
pour un observateur terrestre. Dans le référentiel géocentrique, sa trajectoire
plane et dont la période correspond à celle de la rotation de la Terre, c’est-à-dire
un jour sidéral, ne peut donc être contenue que dans le plan équatorial, car le plan
de la trajectoire contient le centre du modèle Terre sphérique.
D’après ce qui précède :
1/ 3
iques
:211
0428
§ GM T T 2 ·
r0 = ¨
¸ ≈ 42 000 km soit une altitude h = r0 − RT ≈ 36 000 km
2
© 4π
¹
Cette altitude élevée rend plus difficile la mise en orbite des satellites
géostationnaires, il faut plus d’énergie, mais permet le positionnement d’un grand
nombre de satellites sans problème d’encombrement d’orbite.
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
À partir du sol la vitesse du satellite ne peut être orthoradiale, le point de lancement
n’est donc pas le périgée, celui-ci étant plus proche du centre O (foyer de l’ellipse),
il se trouve donc à l’intérieur de la Terre. La satellisation échouera, même si la
condition énergétique est satisfaite, car la trajectoire recoupe la sphère terrestre.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ure d
e Mé
caniq
ue e
t des
Micro
techn
20. Bien penser que l’on travaille dans le référentiel géocentrique.
GM T m
En orbite, l’énergie du satellite est E = −
2a
GM T m
Au sol ce même satellite a l’énergie potentielle −
et l’énergie cinétique due
RT
1
au mouvement de la Terre, soit à la latitude λ :
m RT2 cos 2 (λ ) Ω 2
2
L’énergie minimale à lui communiquer est donc :
§ 1
1 · 1
2
2
2
GM T m ¨
−
¸ − m RT cos (λ ) Ω
© RT 2 a ¹ 2
Ce qui montre l’intérêt d’une base de lancement proche de l’équateur (voir la
question 37.).
21. (MPSI) C = r 2 θ = r (rθ) , or en P et A , la vitesse est orthoradiale donc :
C = rP vP = rAv A
1 2 GM m
GM m
mv −
=−
soit
r
2
2a
6907
3955
8
Se servir de la conservation de l’énergie : E =
§1 1 ·
v 2 = 2GM ¨ −
¸
© r 2a ¹
pour
r = rP
2 a = rA + rP ; vmin = v A pour
et
91:1
Alors vmax = vP
et
33.1
2 a = rA + rP .
r = rA
8891
2320
:105
.71.1
22. Kepler (1571-1630) établit, à partir d’observations et de mesures expérimentales,
faites auparavant par Tycho Brahe (1546-1601) sur plusieurs années, les lois des
mouvements des planètes autour du Soleil. Ce sont ces lois empiriques, publiés en
1621, qui permettront à Newton d’établir, plus tard, la loi de la gravitation. Newton
est né en 1642 et énonce le principe fondamental de la dynamique et la loi de la
gravitation en 1687.
:211
0428
318:
Loi 1 : les trajectoires des planètes sont des ellipses dont le centre du Soleil est un
foyer.
Loi 2 : loi des aires, le rayon joignant une planète au Soleil balaie des aires égales
pendant des durées égales.
a3
Loi 3 : 2 = cste , c’est-à-dire indépendant de la planète.
T
GM S
r0
T=
2π r0 2π r03/ 2
=
v
GM S
r03 GM S
=
4π 2
T2
ue e
t des
v(r0 ) =
Micro
techn
iques
Les deux premières lois se justifient, à partir des lois de Newton, par le fait que la
1
force est centrale et en 2 . Établissons la troisième dans le cas particulier du
r
mouvement circulaire. Ici le centre attracteur en O est la masse du Soleil M S :
a 3 GM S
=
4π 2
T2
a3
reste constant, c’est la troisième
T2
e Mé
Si on change de planète a et T changent, mais
caniq
Pour un mouvement elliptique on remplace r0 par le demi-grand axe a :
ure d
loi de Kepler.
e Na
Écol
tiona
le Su
périe
Application : avec a et T pour la Terre (en orbite autour du Soleil) on peut mesurer
la masse du Soleil.
4π 2 aT3
4π 2 (1,5.1011 )3
30
MS =
=
M S = 2, 0.10 kg
2
2
−11
GTT
6, 67.10 (365, 25 × 24 × 3600)
&KDSLWUH
6907
3955
8
Masse très grande, nécessaire pour atteindre, au cœur, la température de fusion
nucléaire. La masse d’un astre est mesurable s’il possède un satellite (une planète
pour une étoile). Pour les étoiles autres que le Soleil, on ne peut pas voir directement
une planète à proximité, on utilise les systèmes stellaires doubles (voir question 54.).
$SSOLFDWLRQVGLUHFWHVGXFRXUV
ω0
8891
2320
:105
.71.1
33.1
91:1
§ 1
·
x + ω 20 x = 0 avec Δ = 4 ω 20 ¨
− 1¸ et le type de
2
Q
© 4Q
¹
solution restent les mêmes, seules changent les conditions initiales.
1
* le régime apériodique, Δ > 0 , correspond à un fort amortissement, Q < :
2
x(t ) = A e −γ t + B e− β t avec γ > 0 et β > 0 ; la solution est une somme de deux
exponentielles décroissantes et la traduction des conditions initiales conduit à :
v
x(t ) = 0 (e − γ t − e − β t ) (graphe de gauche).
β −γ
23. L’équation différentielle x+
1
, donne :
2
et la traduction des conditions initiales conduit à
.
v0
ω
−
sin ω t e 2 Q
t
et la traduction des conditions
(graphe de droite).
x (t )
t
e Mé
caniq
0
ue e
t des
x (t )
t
ure d
0
t
Micro
initiales conduit à x (t ) =
ω0
ω0
2Q
1
:
2
techn
la solution s’écrit : x (t ) = ( A cos ω t + B sin ω t ) e
−
iques
* le régime pseudopériodique, Δ < 0 , correspond à un faible amortissement Q >
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
G
24. On note u 1→2 , le vecteur unitaire dirigé de M 1 vers M 2 ; la force gravitationnelle
JG
mm G
qu’exerce M 1 sur M 2 est F 1→ 2 = − G 1 2 2 u 1→2 où r est la distance M 1M 2 .
r
Notons que la droite d’action de la force passe par les deux points.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
−ω 0 t
:211
x (t ) = v0t e
−ω 0 t
0428
x (t ) = ( A + Bt ) e
318:
* le régime apériodique critique, Δ = 0 soit Q =
JG
JG
mm G
G
G
Et comme u 2→1= − u 1→2 , on a immédiatement F 2→1 = − G 1 2 2 u 2→1= − F 1→2 , ce qui
r
traduit le principe de l’action et de la réaction.
91:1
6907
3955
8
25. L’accélération de la pesanteur g L sur la Lune conditionne le temps de chute :
1
g
h = g Lτ 2 g L = 1, 6 m.s −2 ( g L ≈ T , sur Terre, τ T = 0, 45 s )
6
2
GM L
ce qui donne M L = 7, 4.1022 kg (soit M L ≈ M T / 81 )
Or g L ≈
RL2
:105
.71.1
33.1
26. Le moment cinétique fixe le plan de la trajectoire et la vitesse aréolaire (loi des
aires) et l’énergie mécanique fixe par son signe la nature de la conique, ellipse
( E < 0 ), parabole ( E = 0 ) ou hyperbole ( E > 0 ). Pour l’ellipse E fixe la valeur du
demi grand axe a.
8891
2320
27. a) On utilise la troisième loi de Kepler appliquée à Téthys :
aTh 3 GM Sat
4π 2 RTh3
=
=
A.N. : M Sat = 5, 7.10 26 kg
M
Sat
4π 2
TTh 2
G TTh 2
318:
Soit une masse de l’ordre de 3.10 −4 masse solaire, on a accès à la masse de
Saturne grâce à un de ses satellites.
3
ue e
t des
Micro
techn
iques
:211
0428
§ aH · 2
aTh 3 GM Sat aH 3
=
=
=
A.N. : TH = 1, 9.10 6 s = 21 jours
T
T
¨
¸
H
Th
2
2
2
4π
TTh
TH
© aTh ¹
b) Si l’anneau est formé de fragments indépendants en orbite circulaire, la vitesse
G M sat
.
des fragments est : v =
r
Si l’anneau est un corps solide, la vitesse de chaque point est du type v = rω , soit
v proportionnelle à r.
L’observation montre v est une fonction décroissante de r, les anneaux sont des
fragments indépendants (sans doute les restes d’un ancien satellite de Saturne,
trop proche de sa planète et brisé par les forces de marées, voir la question 46.).
GM Sat
a3
=
, on exprime la constante G grâce au
2
4π 2
T
e Mé
d) Avec les données pour Titan :
caniq
28. a) 2c = 2ae = 0,50 U.A.
b) rA = a + c = a (1 + e) = 5, 4 U.A.
c) rP ( Pluton ) = a (1 − e) = 29,6 U.A. < a Neptune
ure d
GM sol
aT3
=
ce qui permet de garder
2
4π 2
TT
les distances en U.A. et les périodes en années :
3
périe
mouvement de la Terre autour du Soleil :
M Sat § a · § TT ·
−4
=¨
¸ ¨
¸ = 2,8.10
M sol © aT ¹ © T ¹
e Na
Écol
tiona
le Su
2
&KDSLWUH
Seconde planète en masse, après Jupiter ( 10 −3 M sol ).
32
§a ·
aV3
aT3
TV = TT ¨ V ¸ = (0,72) 3 2 = 0,61 an , Vénus est une planète
=
2
2
TT
TV
© aT ¹
intérieure qui va plus vite que la Terre sur son orbite.
§1 1 ·
f) C = rAv A = rP v P et avec l’énergie : v 2 = 2GM ¨ − ¸
© r 2a ¹
4π 2 a 3
T2
.71.1
avec GM S =
33.1
­ 2 § 1
§ rP ·
1 ·
° vA = ¨ −
¸ = 2GM S ¨
¸
°
© rA 2a ¹
© rA 2 a ¹
®
° v 2 = § 1 − 1 · = 2GM § rA ·
¸
¸
S ¨
° P ¨r
© P 2a ¹
© rP 2 a ¹
¯
91:1
6907
3955
8
e)
318:
8891
2320
:105
12
­
2π a § 1 − e ·
−1
° vA =
¨
¸ = 22,0 km.s
+
T
1
e
­ rA = a (1 + e)
°
©
¹
De plus ®
®
12
=
−
r
a
(1
e
)
¯ P
2π a § 1 + e ·
°
−1
° v P = T ¨© 1 − e ¸¹ = 26,5 km.s
¯
On a bien v A < v P (loi des aires) et les deux vitesses sont légèrement inférieures
aux 30 km.s −1 de la Terre.
23
ure d
e Mé
caniq
29. Expérience de Cavendish : mesure de G (1798)
a) La loi du moment cinétique scalaire par rapport à l’axe appliqué à la tige et aux
masses s’écrit sachant que le moment d’inertie d’une masse m à distance l de
l’axe est ml 2 et que le moment des poids et de la tension du fil par rapport à l’axe
sont nuls :
2ml 2θ = − Cθ , équation du type θ + ω 20θ = 0
ω0 =
C
2ml 2
(1)
périe
d’où des oscillations sinusoïdales de pulsation
Rq : La période très grande ( T0 = 251 s ) est liée à une très faible constante de
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
torsion C . En pratique la mesure de T0 donne C .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
techn
iques
:211
0428
§ T ·
rP
= 0,97
g) a = aT ¨
¸ = 18 U.A. et e = 1 −
a
© TT ¹
Ellipse très aplatie et pourtant la comète fait demi-tour avant d’atteindre l’orbite
d’Uranus. Noter que la période de la comète de Halley n’est pas restée constante
au cours des âges, elle a varié en fonction de ses passages plus ou moins
rapprochés des planètes géantes.
Parmi les comètes périodiques, on peut signaler la comète Hale-Bopp, l’une des
plus brillantes du XXe siècle, visible pendant 18 mois en 1996/1997. Son retour
est prévu, sauf perturbation très probable puisque son aphélie est de l’ordre de
300 UA, vers 4400.
6907
3955
8
b) Si on se limite aux seules interactions gravitationnelles S2 – B et S1 – A (modèle
GM m
sphérique avec un bras de levier l ) : à l’équilibre 2 2 l − Cθ = 0
l
2 3
θ ω0 l
(2)
soit d’après (1) : G =
M
17
≈ 5, 0 10 −3 rad .
60 × 180
G = 6, 2 10 −11 N.m 2 .kg −2 , cette valeur trop faible par rapport à la valeur
91:1
AN : On convertit θ en radians : θ = π
c) Toujours avec le modèle sphérique
JJJJG
GM m GM m
FO2 A =
=
, le bras de
O2 A 2
5 l2
l
levier est l sin α avec sin α =
5l 2
Le moment par rapport à l’axe est donc
GM m
−
. Idem pour l’interaction O1 B .
5 5l
.71.1
33.1
tabulée s’explique par un calcul théorique trop simplifié. Il faut tenir
compte des interactions O2 A et O1 B .
8891
2320
:105
O2
α
A
0428
318:
B
G
FO2 A
À l’équilibre :
G=
θ ω 20 l 3
1 ·
§
M ¨1 −
¸
© 5 5¹
techn
iques
et
:211
2GM m §
1 ·
1−
¨
¸ = Cθ
l
5 5¹
©
AN : G = 6,8 10−11 N.m 2 .kg −2 , valeur plus satisfaisante. Attention l’écart à la
Micro
valeur tabulée n’a pas de rapport avec l’incertitude de mesure.
caniq
ue e
t des
d) Des distances O2 B et O1 A plus petites permettent effectivement d’avoir un angle
expérimental plus grand, mais l’incertitude de mesure de type protocole, liée à la
sphéricité des masses M , sera plus importante.
e Mé
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
e Na
Écol
tiona
le Su
périe
ure d
30. Notons d’abord que dans tous les cas le régime d’écoulement est amorti par
existence de forces de viscosité entre le fluide réel et la paroi interne du conduit.
Si le diamètre d du conduit est faible et / ou le fluide très visqueux, cet effet est
particulièrement important (amortissement fort) et le régime est apériodique : les
deux niveaux s’égalisent lentement et le phénomène s’arrête là.
Si le diamètre d du conduit est important et / ou le fluide peu visqueux, cet effet
sera bien moindre (amortissement faible) et le régime est pseudopériodique : les
&KDSLWUH
deux niveaux s’égalisent après plusieurs oscillations (échange d’énergie cinétique et
potentielle de gravité).
6907
3955
8
31. La corde vibrante, celle d’un piano ou d’un violon par exemple, un peu comme la
membrane d’un haut-parleur, transmet ses vibrations à l’air ; il en résulte un son
émis dont l’énergie acoustique est prélevée sur l’énergie mécanique (cinétique et
potentielle) de la corde ; son mouvement (et corrélativement le son émis) est donc
amorti en régime libre (c’est-à-dire non entretenu).
33.1
91:1
32. a) L’équation différentielle vérifiée par z(t ) (écart par rapport à la position d’équilibre zéq = 0 ) a été établie avec soin à la question 49. du chapitre 6, le coefficient
de frottement est ici noté α :
.71.1
d 2z
dz
+α + k z = 0
2
dt
dt
Le régime d’amortissement est critique (retour le plus rapide à l’équilibre)
lorsque Δ = α 2 − 4km = 0 soit α = 2 km .
2320
:105
m
8891
b) Le système, voiture avec passagers, de masse totale m + m p , possède une
4π 2 (m + m p ) 2
m pT 2
≈ 4 102 kN.m −1 , soit une grande raideur.
Micro
On en déduit k =
techn
iques
:211
0428
318:
′ ≠ 0 . L’équation différentielle précédente
nouvelle position d’équilibre zéq
devient :
d 2z
dz
′ )=0
(m + m p ) 2 + α + k ( z − zéq
dt
dt
Son discriminant est Δ = α 2 − 4k (m + m p ) = − 4km p < 0 avec α = 2 km ; le
régime est alors pseudopériodique (revoir la question 2.) :
km p
2π 2π (m + m p )
et de pseudo-période T =
=
de pseudo-pulsation ω =
ω
m + mp
km p
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
34. Lorsque les œufs mélangés sont au repos dans un bol, on constate (par exemple en
appuyant avec une fourchette sur la surface libre d’un coté) que le mélange oscille à
une fréquence propre bien définie, même si ces oscillations sont de courte durée car
très amorties. Battre les œufs consiste donc à exciter périodiquement à une
fréquence imposée par l’opérateur (à travers le coup de fourchette) un système ayant
une fréquence d’oscillation propre. Il y a bien sûr résonance avec une amplitude plus
importante lorsque les deux fréquences coïncident. Pour éviter les risques de
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
33. Le moteur constitue pour le support un excitateur dont la fréquence diminue
progressivement après coupure de l’alimentation. Cela signifie que le support auquel
il est couplé par fixation, est mis en régime forcé à fréquence variable ; comme tout
objet mécanique ce support a une (ou des) fréquence(s) propre(s) de vibration, et
l’on observe alors un phénomène de résonance lorsque la fréquence du moteur
coïncide avec la fréquence propre du support, d’où des vibrations importantes dans
la bande passante (voir la question 41.).
débordement, il vaut mieux battre « très vite », à savoir à fréquence élevée, même si
la viscosité fait que ce système amorti n’a pas une résonance des plus prononcées…
.71.1
33.1
91:1
6907
3955
8
35. L’axe de référence est l’intersection entre le plan de l’écliptique et le plan
équatorial. Deux fois par an le Soleil traverse (dans son mouvement apparent) le
plan équatorial, il s’agit des équinoxes de printemps et d’automne. C’est l’équinoxe
de printemps qui a été choisie comme référence pour les angles, on l’appelle point
vernal ou point γ .
Les dates de début des saisons correspondent à la « hauteur » du Soleil au-dessus ou
en dessous du plan équatorial : 0° aux équinoxes, maximale( +23°27′ ) au solstice
d’été et minimale ( −23°27′ ) au solstice d’hiver. Cet angle de 23°27′ est l’angle
d’inclinaison de l’axe des pôles par rapport à la perpendiculaire au plan de
l’écliptique.
8891
2320
:105
36. La 3e loi énoncée par Kepler concerne les planètes autour du Soleil, pour lesquelles
il a établi que le rapport T 2 / a 3 était le même pour toutes les planètes, alors que
pour chacune a et T diffèrent. Cela est le cas dans l’énoncé sous la forme
T2
4π 2
approchée 3 =
(1).
a
GM S
T2
4π 2
T2
=
(2), le rapport 3 d’une
3
a
G ( M S + mP )
a
planète à l’autre n’a plus la même valeur. En réalité, pour toutes les planètes, on a
mP M S soit M S + mP ≈ M S , ce qui donne bien (1). Des planètes du système
solaire, Jupiter possède la plus grande masse qui ne vaut que le millième de la masse
du Soleil, ce qui justifie l’approximation et la loi sous la forme (1).
iques
:211
0428
318:
En revanche, sous la forme théorique
Micro
techn
Mais pour deux corps en interaction gravitationnelle et dont les masses ne sont pas
très différentes, il faut appliquer la forme (2) ; dans ce cas aucun ne peut être
considéré comme fixe dans le référentiel barycentrique, mais ils tournent tous les
deux autour de leur centre de masse comme à la question 44..
périe
ure d
e Mé
caniq
ue e
t des
37. Pour pouvoir bénéficier de l’effet d’entraînement de la Terre lié à sa rotation propre,
effet proportionnel à la distance à l’axe de rotation, donc maximal à l’équateur où
v = 2π RT /T ≈ 1670 km/h . Au sol le satellite dispose déjà d’énergie cinétique dans le
référentiel géocentrique. Le site européen de Kourou en Guyane française est le
mieux placé de ce point de vue avec une latitude de 5°. L’économie en carburant est
estimée à 5% par rapport aux bases plus hautes en latitude comme Cap Canaveral en
Floride (28°) et surtout Baïkonour (46°) ou Plesetsk (63°).
La Terre tourne d’Ouest en Est autour de son axe, la plupart des satellites tournent
donc dans ce sens autour de la Terre pour bénéficier de la rotation de la Terre au
lancement (vers l’Est). Quelques satellites, qualifiés de rétrogrades, tournent en sens
inverse, en général sur des orbites très
inclinées.
A
e Na
Écol
tiona
le Su
38. T est le centre de la Terre, A un point de
sa surface (avec TA ≈ 6 400 km ) à la
T
α
S
•
&KDSLWUH
.71.1
33.1
91:1
6907
3955
8
limite du champ couvert par le satellite géostationnaire S
( TS ≈ 6 400 + 36 000 = 42 400 km ).
TA
Le triangle ATS étant rectangle en A , cos α =
soit α = 81° .
TS
Un satellite géostationnaire couvre un secteur d’angle 2α = 162 ° . Pour couvrir la
surface entière ( 360° ), il faut disposer d’un minimum de trois satellites
géostationnaires. Le même calcul montre que les latitudes extrêmes théoriques
accessibles au satellite sont ±81° . Les contraintes techniques des
télécommunications diminuent nettement ces valeurs. La Russie par exemple a une
grande partie de son territoire non accessible aux satellites géostationnaires.
Noter que le système GPS fonctionne avec 24 satellites (la triangulation nécessaire
pour la précision nécessite plusieurs satellites pour un même point) d’altitude
≈ 21 000 km , donc non géostationnaires.
2320
:105
39. Admettons que la mécanique classique s’applique. Il faut alors traduire que la
vitesse de libération obtenue à la question 9., vl = 2GM / R , s’identifie à la vitesse
de la lumière pour une étoile de masse M = M S = 2.1030 kg ; son rayon est alors
:211
0428
318:
8891
Rlim = 2GM S / c 2 ≈ 3 km …
Le même calcul appliqué à la Terre donne un rayon d’environ 9 mm ! Ce qui donne
une idée de la densité théorique d’un trou noir : 6.10 24 kg dans une sphère de 9 mm
de rayon !
iques
([HUFLFHV
(
θ
μ g
μ
θ + sin θ = ψ
m
R
caniq
θ +
m
e Mé
)
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
μ
g
μ
b) Pour θ petit, soit sin θ ≈ θ , l’équation différentielle θ + θ + θ = ψ est
m
R
m
μ
π ·
§
linéaire du second ordre avec second membre du type
ψ 0Ω sin ¨ Ω t + ¸ ;
m
2¹
©
au bout d’un temps suffisant le régime forcé sinusoïdal est atteint et θ (t ) est
alors sinusoïdal de pulsation Ω .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
)
ue e
t des
(
Micro
techn
40. Oscillations forcées sur un cercle en rotation
a) Le référentiel terrestre galiléen est lié aux axes Ox et Oz . L’angle θ repère la
G
G
position de M par rapport à Oz , donc v = R θ uθ . La force de frottement fluide
fait intervenir la vitesse du point par rapport au cercle, il faut utiliser l’angle
G
G
formé par OM avec OA , F = − μ R θ − ψ uθ .
G
La réaction normale est orthogonale à uθ .
G
Projection de la RFD sur u : −mg sin θ − μ R θ − ψ + 0 = m R θ
c) Le régime forcé se calcule avec les complexes (voir le chapitre 0) :
π
θ 1e j Φ ( −Ω 2 + 2 α j Ω + ω 20 ) = 2 αψ 0 Ω e 2
j
2 αψ 0 Ω
( ( ω − Ω ) + 4α Ω )
2
0
2
2
2
et Φ =
12
2
π
− arg ( ω 20 − Ω 2 + 2 α j Ω )
6907
3955
8
θ1 =
2
§ 2α Ω ·
ª πº
soit Φ ∈ « 0 , »
− arctan ¨ 2
¨ ω 0 − Ω 2 ¸¸
2¼
2
¬
©
¹
§ 2α Ω ·
π
ª π
º
Si Ω ≥ ω 0 , Φ = − arctan ¨ 2
− π soit Φ ∈ « − , 0 »
2 ¸
¨
¸
2
¬ 2
¼
© ω 0 −Ω ¹
91:1
π
.71.1
33.1
Si Ω ≤ ω 0 , Φ =
318:
8891
2320
:105
d) Pour Ω < ω 0 , Φ > 0 , il est surprenant a priori qu’un oscillateur mécanique
(passe-bas) soit en avance sur l’excitation, mais en fait ici l’excitation n’est pas
ψ (t ) mais ψ (t ) lui-même en avance de π 2 sur ψ (t ) ; finalement l’oscillateur
est bien en retard sur ψ (t ) l’excitateur.
0428
41. Vibrations d’un moteur
a) Ce travail a été fait à la question 49. du chapitre 6, ici l éq < l 0 ; l’équation
z+
ω0
Q
z + ω 20 =
F0
cos ω t
m
(1) avec
ω0
Micro
soit
techn
iques
:211
différentielle est, en notant z (t ) l’écart par rapport à la position d’équilibre où le
moteur ne fonctionne pas :
d 2z
dz
m 2 + λ + kz = F0 cos ω t
dt
dt
Q
=
λ
m
et ω 20 =
k
m
e Mé
caniq
ue e
t des
b) En régime forcé de pulsation ω imposée par le moteur, l’ensemble de la structure
vibre à la même pulsation ω . Pour résoudre cette question, il est conseillé de
dz
passer en notation complexe et de chercher v = V0 eiϕ et comme v = , v = iω z .
dt
(1) s’écrit alors :
ω
F0 / m
v = V0 eiϕ =
( −ω 2 + 0 iω + ω 20 ) z = F0 / m
(2)
ω 0 Q + i (ω − ω 20 /ω )
Q
ure d
Rq : On reconnaît un filtre passe-bande du second ordre.
F0 / m
ω
2
0
2
+ (ω − ω 20 /ω )2
le Su
V0 (ω ) =
périe
L’expression (2) donne :
e Na
Écol
tiona
Q
&KDSLWUH
V0
Seul le dénominateur dépend de ω et il est
F
/λ
0
minimal lorsque l’expression dans la
parenthèse est nulle, soit pour ω = ω0 . La
6907
3955
8
fonction V0 (ω ) est donc maximale pour
ω = ω 0 , la pulsation propre du système
masse-ressort, qui apparaît une fois de plus
comme la pulsation pour laquelle il y a
résonance.
:105
.71.1
33.1
91:1
ω0
O
ω
Rq : La phase ϕ (ou plus précisément l’avance de phase de la vitesse sur
l’excitation) est donnée par l’argument des deux membres de (2) :
ω 20 /ω − ω
ω 20 − ω 2
tan ϕ =
=Q
; à la résonance, le déphasage est nul.
ω0 Q
ωω 0
8891
2320
c) Le moteur excite la structure à la pulsation ω = 2π n = 628 rad.s −1 .
Suivant le choix du ressort, la pulsation propre est ω 01 = 632 rad.s −1 ≈ ω ou
ω 02 = 316 rad.s−1 ≈ ω / 2 . Le but de la suspension étant d’avoir des amplitudes de
0428
318:
vibration les plus faibles, il est conseillé de choisir le ressort de raideur k2 .
v1′ =
2
v0
3
tiona
e Na
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
le Su
1
k
k
1 k
mv2′2 −
=−
soit v2′2 =
(conforme au résultat ci-dessus)
2
2r0
3r0
3 mr0
Écol
En A −2 :
périe
ure d
De A1+ en A −2 sur l’ellipse de transfert, la conservation du moment cinétique :
v′ v
v2′ = 1 = 0
r0v1′ = 2r0 v2′ conduit à :
2
3
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
1
k
k
4 k
mv1′2 − = −
soit v1′2 =
; le rapport donne
2
r0
3r0
3 mr0
e Mé
En A1+ :
caniq
ue e
t des
Micro
techn
iques
:211
42. (MPSI) Transfert d’orbites d’un satellite
Les énergies, dans le référentiel géocentrique valent, en notant k = GM T m : sur
k
k
; sur la 2e E2 = −
; et sur l’ellipse de
la 1re trajectoire circulaire E1 = −
2r0
4r0
k
k
transfert Et = −
=−
car A1 A 2 = 2a = 3r0 .
2a
3r0
Les variations d’énergie mécanique sont dues à un travail des forces intérieures,
ici l’énergie est fournie par le moteur du satellite, ce qui permet le changement de
k
.
trajectoire. L’énergie dépensée par le moteur du satellite est E2 − E1 =
4r0
1
k
k
k
En A1− : mv02 − = −
soit v02 =
(trajectoire circulaire de rayon r0 )
2
r0
2r0
mr0
1 2 k
k
1 k
mv2 −
=−
soit v22 =
(trajectoire circulaire de rayon 2r0 )
2
2r0
4r0
2 mr0
3
v
v′2 = 0
2
2
v2 =
le rapport donne
6907
3955
8
En A +2 :
Ce dernier résultat était prévisible car sur une trajectoire circulaire v = GM / r et
donc si r0 est multiplié par 2, v0 est divisé par 2 .
v0
= v0
:105
2 v 2 . La variation de vitesse nécessaire est v3 −
2
2 −1
.
2
2320
2 v circ =
.71.1
33.1
91:1
b) Pour décrire une trajectoire parabolique il faut une énergie nulle :
1 2 k
k
mv3 −
= 0 soit v32 =
= v02 , soit v 3 = v 0 .
2
2r0
mr0
En fait v3 est la vitesse de libération à l’altitude 2 r0 , qui vaut bien
43. (MPSI) Utilisation des profils énergétiques
GmM
σ2
L’énergie potentielle effective Veff ( r ) = −
+
r
2 mr 2
8891
dépend de σ , donc des
iques
:211
0428
318:
conditions initiales. Veff (r ) est minimale (dérivée nulle) pour rmin = σ 2 GMm 2 .
Si on change l’énergie totale (nouvelles conditions initiales) sans précautions
particulières, la valeur de σ va changer.
Ainsi le profil énergétique donné à la question 16. et sur lequel on porte diverses
valeurs de l’énergie totale est tracé à σ = cste .
Dans l’exemple, lorsque l’on change l’énergie, σ change. L’allure du profil :
minimum, barrière pour r → 0 … est la même mais la courbe Veff (r ) est modifiée :
techn
nouvelles conditions initiales E1 < E 0 et σ 1 = mr0 v1 < mr0 v 0 = σ 0 , donc rmin < r0 .
Micro
Le minimum de la courbe Veff (r ) est atteint pour une valeur plus petite de r et la
ue e
t des
valeur E1 < E 0 correspond à r = r0 (C.I.). E1 > E min : la trajectoire est elliptique.
Tout ceci est illustré sur la figure ci-dessous.
caniq
Veff
r
e Mé
r0
ure d
Ecercle
périe
E1
e Na
Écol
tiona
le Su
E min
&KDSLWUH
44. Système de deux étoiles (*)
a) Le système des deux étoiles {M 1 , M 2 } est isolé, le mouvement du centre de
6907
3955
8
masse G est rectiligne et uniforme dans le référentiel galiléen de Copernic.
RG est donc galiléen.
JJJJJG
JJJJJG G
b) m1 GM 1 + m 2 GM 2 = 0 ; M 1 et M 2 sont de part et d’autre
de G , la période T est donc commune et :
G
91:1
m2
r
= 1
m1
r2
M2
•
33.1
m1r1 = m 2 r2
M1
•
8891
2320
:105
.71.1
c) Pour un mouvement circulaire :
2π r1
­
2
°T = v
4 π 2 r1 ( r1 + r2 )
1
4 π 2 r12
4 π 2 r12
2
°
2
T
r
r
=
=
+
=
( 1 2)
®
2
v12
Gm 2 r1
Gm 2
°m1 v1 = Gm1m 2
2
° r1
( r1 + r2 )
¯
iques
:211
0428
318:
Il vient :
­
4π 2
2
Gm
=
r1 ( r1 + r2 )
°° 2
2
4π 2
2
T
somme
G
m
+
m
=
r + r2 )( r1 + r2 )
(
)
®
1
2
2 ( 1
2
T
°Gm = 4 π r ( r + r ) 2
2
1
2
°̄ 1
T2
a 3 G ( m1 + m 2 )
=
On en déduit la relation demandée :
T2
4π 2
techn
r23
G m1
≈
, soit un mouvement
2
T
4π 2
Si m1 m2 on retrouve (avec r1 r2 ) :
ue e
t des
Micro
circulaire de M 2 autour de M 1 « immobile ».
G G
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
e Mé
caniq
par ailleurs f . ur < 0 , elle est donc attractive ; sa norme est en 1/ r 4 , il ne s’agit
donc pas d’une force d’origine gravitationnelle.
3mr03v02 G
mv02
La grandeur −
u
est
homogène
à
, soit une énergie divisée par une
r
2r 4
r
longueur, ce qui a bien la dimension d’une force.
G
G
Une force de type f = f (r ) ur est un champ de forces conservatif ; pour trouver
G
dE
l’énergie potentielle dont dérive f , il suffit d’écrire f ( r ) = − p , soit ici :
dr
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
45. (MPSI) Force centrale non newtonienne
G JJJJG
G
a) La force est colinéaire au vecteur position r = OM = r ur , elle est donc radiale ;
mr03v02
en posant E p = 0 pour r infini.
2r 3
JJG
La force est centrale, dans le cas général u r vecteur de la base locale sphérique,
donc le mouvement est plan. Le plan est imposé par les conditions initiales.
dE
3mr03v02
=− p
4
2r
dr
Ep = −
6907
3955
8
−
33.1
91:1
b) La particule n’est soumise qu’à une seule force, conservative, donc son énergie
mécanique E = Ec + E p est une constante du mouvement. Il suffit donc de
déterminer la valeur de cette énergie en considérant l’instant initial :
mr 3v 2
1
pour θ = 0 , r = r0 et v = v0 , d’où E = mv02 − 0 3 0 = 0
2
2r0
2320
:105
.71.1
E = 0 , la trajectoire est bornée contrairement au cas des forces
Bien que
gravitationnelles où la trajectoire correspondant à une énergie nulle est une
trajectoire permettant au mobile de s’éloigner jusqu’à l’infini avec une vitesse
nulle (penser au calcul de la vitesse de libération).
:211
mM J
mM J
GM J ª 1
1 º
−G
(0) ω 2 =
+
(0’)
«
2
2
2
(d − r )
(d + r )
2d ¬ (d − r ) (d + r ) 2 »¼
iques
−(2m)ω 2 d = − G
0428
318:
8891
46. Limite de Roche (*)
a) Le mouvement est à force centrale, d’où C = r 2θ = cste , et de r = d = cste
(mouvement circulaire), on déduit θ = ω = cste (mouvement uniforme).
G
La RFD appliquée à l’ensemble de la comète et projetée sur l’axe dirigé par ur :
Micro
techn
Attention, la comète n’a pas une symétrie sphérique, et comme le champ de force
est inhomogène, la somme des forces sur les deux sphères n’est pas égale à la
force qui s’exercerait sur une sphère de masse 2m : le second membre de la RFD
(2m) M J
!
n’est donc pas − G
d2
ue e
t des
b) La sphère de gauche (1) subit l’attraction de Jupiter, l’attraction de la sphère de
JG
G
droite, et la réaction − R = − Rur de la sphère (2), d’où :
mM J
m2
+
− R (1)
G
(d − r )2
(2r )2
La sphère de droite (2) subit l’attraction de Jupiter, celle de la sphère de gauche,
JG
G
et la réaction R = Rur de la sphère (1), d’où :
e Mé
caniq
− mω 2 (d − r ) = − G
mM J
m2
−
+ R (2)
G
(d + r ) 2
(2r ) 2
L’une de ces deux équations est inutile puisque leur somme redonne (0) où les
forces intérieures à la comète s’éliminent.
périe
ure d
− mω 2 (d + r ) = − G
e Na
Écol
tiona
le Su
c) Le maintien en contact des sphères suppose R > 0 ; la rupture se fait donc pour
R ≤ 0.
&KDSLWUH
(1) et (0’)
R = −G
mM J
mM J § 1
d −r ·
m2
G
G
+
+
+
; un
¨
¸
(d − r )2
2d © d − r ( d + r ) 2 ¹
4r 2
3GmM J r
m2
r
+G 2
donne : R ≈ −
3
4r
d
d
1/ 3
§ 12 M J ·
La condition R ≤ 0 conduit à d ≤ dlim = ¨
¸ r , d’où le rapport
© m ¹
6907
3955
8
développement limité à l’ordre 1 en
1/3
d lim § 12 μ J ·
=¨
¸
RJ © μC ¹
33.1
91:1
≈ 2,5
2320
:105
.71.1
ce qui suppose un passage de la comète très proche de Jupiter.
C’est ce qui est arrivé à la comète Shoemaker-Lévy 9 en 1994 : passée trop près
de Jupiter, elle s’est brisée en plusieurs morceaux qui ont ensuite percuté la
planète géante.
8891
47. Satellite freiné par l’atmosphère
a) Sur une trajectoire circulaire de rayon r , la vitesse du satellite est v = GM T / r .
E
mM T
1 2
mv = G
= − p (théorème du viriel) et l’énergie mécanique
2
2r
2
s’écrit indifféremment :
2
MTm
2r
= − Ec = − G
:211
Ep
iques
E = Ec + E p =
0428
318:
Alors Ec =
techn
b) Deux raisonnements sont possibles :
* Pour un satellite freiné, le système n’est plus conservatif et l’énergie E
diminue (la force de frottement s’oppose au déplacement et donc son travail est
négatif) ; puisque E = − GM T m / 2r , on déduit que le rayon r diminue et la
e Mé
caniq
ΔE p < 0 et ΔEc > 0 . Un satellite « freiné » voit donc bien sa vitesse
augmenter, car son énergie potentielle diminue deux fois plus vite (en valeur
absolue) que son énergie cinétique n’augmente.
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
c) mv 2 / h est le rapport d’une énergie par une distance, c’est donc une grandeur
homogène à une force et donc β est sans unité.
Plus l’altitude décroît, plus l’atmosphère devient dense et donc plus la force de
freinage augmente ; c’est ce qui justifie sa dépendance en 1/ h .
JG
βm 2G
v uθ ; son travail sur une révolution (en
La force de frottement est F = −
h
supposant toujours l’orbite quasi circulaire) est :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
ue e
t des
Micro
vitesse v = GM T / r augmente (on suppose que la trajectoire reste quasi
circulaire à chaque instant). En résumé, par frottement l’énergie diminue, donc
la trajectoire change, le rayon diminue et la vitesse augmente.
* On peut également remarquer d’après E = E p / 2 = − Ec , que ΔE < 0 entraîne
JG JJG
2π JG
βm 2
G
F . dl = ³ F . r dθ uθ ≈ −
v .2π r
0
h
GM T
2πβ GmM T
, WJFJG = −
(1)
et avec v =
h
r
L’énergie du satellite est, avec h RT :
tour
6907
3955
8
WJFJG = ³
MT m
MT m
M m§
h ·
1
= −G
≈ − G T ¨1 −
≈ 1− x
¸ (2) car
1+ x
2r
2( RT + h)
2 RT © RT ¹
Le théorème de l’énergie mécanique s’écrit en cas de non conservation de
l’énergie mécanique comme ici :
M m
2πβ GmM T
ΔE = WJFJG soit d’après les expressions (2) et (1) : G T 2 Δh = −
2 RT
h
4πβ RT2
h
:105
Δh = −
et finalement :
.71.1
33.1
91:1
E = −G
2320
AN : Δh = − 28,3 m , variation très faible justifiant l’hypothèse de la trajectoire
8891
quasi circulaire.
techn
iques
:211
0428
318:
48. (MPSI) Diffusion de Rutherford
a) Le noyau d’or et la particule α portent tous les deux une charge positive ; la
force coulombienne est donc répulsive :
G 2e.Ze G
2 Ze 2
f =
u
k
soit
=
.
r
4πε 0 r 2
4πε 0
FM or
m
197
= or =
≈ 50 , on considère que le
Si on note F le centre de masse :
4
FM α
mα
noyau d’or reste en F.
caniq
ue e
t des
Micro
b) La force conservative dérive de l’énergie potentielle
k
E p = , en prenant E p = 0 en r → ∞
r
1
k
1
E = mv 2 + = cste = mv 02
2
2
r
G
v0
H
M0
• F
⊗
G
uz
ure d
e Mé
b
le Su
tiona
e Na
)
Écol
(
périe
La force est centrale : Le moment cinétique en F est constant :
G JJJJG
G JJJG
σ = FM ∧ mv = cste
Avec les conditions initiales :
JJJG JJJJJG
JJJG
G JJJJJG
G
G
G
σ = FM 0 ∧ mv 0 = FH + HM 0 ∧ mv 0 = FH ∧ mv 0
&KDSLWUH
G
G
σ = m v0 b u z
rm =
6907
3955
8
1 2
k
mv0 + 0 = 0 + , et avec l’expression de k :
2
rm
c) En rm , v = 0
Ze2
4πε 0m p v02
1
1
m(r 2 + r 2θ 2 ) + E p (r )
2
La loi des aires σ = mr 2θ permet d’éliminer θ :
1
σ2
1
E = mr 2 +
+ E p (r ) ≡ mr 2 + Veff (r )
2
2
2 mr
2
Cette relation définit une énergie
Veff
potentielle effective :
.71.1
33.1
91:1
§ Ze 2 · 2
= 1, 0.108 m.s −1 , les particules α sont relativistes, il faut
AN : v0 = ¨
¨ 4πε 0 m p rm ¸¸
©
¹
une énergie très grande pour que les deux charges positives soient aussi
proches.
+
k
r
de r. Quand r = rm , r = 0 donc
m v 02b 2 k
+
r
2 r2
r2 −
k
r
O
rm
r
techn
+
Micro
E =
σ
2 mr 2
E
mv 02 2
k
k
r−
b = 0 r 2 − r − b2 = 0
2E
E
E
rm =
L’équation admet une racine positive :
ue e
t des
E = Veff =
2
iques
Veff (r ) est une fonction décroissante
k
+
2E
k2
+ b2
4E 2
e Mé
caniq
k
ŹPour b = 0 , on retrouve rm = , la particule repart dans la direction opposée à
E
G
v 0 , déviation de π . De plus si E / rm 2 .
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
ŹSi b / , à E = cste , rm / et rm > b , la particule α est déviée par la force
répulsive.
ŹPour b très grand : rm → b , la particule n’est pas déviée, elle passe trop loin de F.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
2 mr
2
0428
σ2
:211
Veff ( r ) =
318:
8891
2320
:105
d) E =
33.1
qq′
(1,6.10−19 ) 2
=
= 8, 2.10−8 N
4πε 0 r12 4π × 8,85.10−12 × (53.10−12 )2
Fg
Le rapport est bien sûr indépendant de r1 et vaut
.71.1
Fe =
91:1
6907
3955
8
49. Le modèle de l’atome d’hydrogène
a) La force électrique est comme la force gravitationnelle, radiale et en 1 / r 2 ; bien
sûr le produit des masses est remplacé par le produit des charges des deux
particules et la constante de gravitation G par la constante 1 / 4πε 0 . En revanche,
alors que la force gravitationnelle est toujours attractive, le sens de la force
électrique dépend du signe des deux charges : deux charges de même signe se
repoussent, et ici le proton attire l’électron. En norme :
m m′
0,91.10−30 × 1,67.10−27
Fg = G 2 = 6,67.10−11
= 3,6.10−47 N
−12 2
r1
(53.10 )
≈ 4.10−40 ; dans la suite la
:105
Fe
force gravitationnelle est négligée au profit de la seule attraction électrique.
318:
8891
2320
Par ailleurs le proton a une masse environ 1 800 fois plus grande que celle de
l’électron, le centre de masse du système est donc confondu avec le proton, et de
ce fait ce dernier est quasi immobile dans le système « atome » (voir la question
11.).
iques
:211
0428
b) À la force gravitationnelle attractive correspond l’énergie potentielle :
m m′
Ep = − G
r
À la force électrique attractive correspond, par analogie, l’énergie potentielle :
e2
Ep = −
4πε 0 r
v2
e2
−m 1 = −
r1
4πε0 r12
Micro
techn
G G
c) La relation fondamentale de la dynamique appliquée à l’électron, ma = F , s’écrit
G
en projection sur ur :
v1 =
ue e
t des
e
4 πε0mr1
AN : v = 2,2.106 m.s −1 ; cette vitesse, v ≈ 2 200 km.s −1 , est énorme pour une
v12
r1
a1 =
ure d
On en déduit l’accélération a 1 =
e Mé
caniq
particule matérielle (on a v / c = 1 / 137 la constante dite de structure fine).
Elle est néanmoins bien inférieure à c ce qui justifie a posteriori
l’hypothèse non relativiste.
e2
4 πε0 mr12
e Na
Écol
tiona
le Su
périe
AN : a 1 = 9,0.1022 m.s −2 , une accélération colossale !
&KDSLWUH
d) L’énergie cinétique de l’électron est Ec 1 =
e2
= − 2 Ec1
4πε0 r1
6907
3955
8
Son énergie potentielle est E p 1 = −
1 2
e2
mv1 =
2
8πε0 r1
d’où l’énergie mécanique : E 1 = Ec1 + E p 1 = − Ec 1 , soit :
e2
8πε0 r1
91:1
E1 = −
33.1
S’agissant d’un état lié pour une force attractive, on a E 1 < 0 .
.71.1
AN : E 1 = − 2,17.10 −18 J = −13, 6 eV
8891
2πr1
T1 =
soit
v1
318:
e) La période de révolution est donnée par T1 =
2320
:105
Rq : On retrouve la valeur de l’énergie d’ionisation de l’atome d’hydrogène,
Ei = | E 1 | = 13,6 eV , correspondant à l’énergie qu’il faut fournir à l’atome
pour arracher (ou libérer) l’électron du proton.
Bien sûr T / r = cste , on retrouve la 3 loi de Kepler.
e
3
1
0428
2
1
2π
4 πε0 m r13 / 2
e
:211
AN : T1 = 1,5.10 −16 s
techn
iques
La longueur d’onde du rayonnement électromagnétique correspondant à cette
période est λ = cT = 0,045 ȝm = 45 nm , ce qui se situe dans le domaine de
l’ultraviolet. On ne peut donc pas espérer ioniser un atome d’hydrogène avec un
photon dans le domaine visible.
vn =
v1 =
avec
n=
mvn
rn =
n 2ε 0h 2
π me 2
e2
2ε0h
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
v1
n
et rn =
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
g) On a facilement
e2
n 2ε0h
caniq
vn =
e2
e 2 vn
puisque m rn vn = n =
=
4πε0mrn 4 πε0 n=
e Mé
d’où
vn2 =
ure d
périe
v2
e2
−m n = −
4πε0 rn2
rn
ue e
t des
Micro
f) L’électron a une trajectoire plane circulaire autour du proton, son vecteur vitesse
est orthogonal à son vecteur position et donc dans le référentiel considéré :
G
G
G
G
σ O = r ∧ mv = m rv uz .
Comme en c), la relation fondamentale de la dynamique appliquée à l’électron,
G
s’écrit en projection sur ur :
et de même
rn = n 2 r1
avec
r1 =
ε 0h 2
π me 2
6907
3955
8
La quantification du moment cinétique conduit à celle de la vitesse et du rayon de
l’atome. Lorsque n augmente, le rayon augmente et la vitesse diminue comme
pour les planètes autour du Soleil.
L’application numérique avec h = 6, 63 10−34 J.s donne :
r1 = 53.10−12 m et v = 2,2.106 m.s −1
91:1
soit les valeurs numériques de la partie précédente.
me 4
n 2 8ε02h 2
:105
me4
= −13,6 eV
8ε 02 h 2
2320
ce qui permet de trouver l’expression de E 1 = −
En = −
.71.1
1
E n = Ec n + E p n = − Ec n = − mvn2 soit avec vn :
2
33.1
h) L’énergie mécanique se calcule comme à la question d) :
318:
8891
C’est cette quantification des niveaux d’énergie qui est utile dans l’exercice 34.
du chapitre 3..
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
:211
0428
50. (MPSI) Passage d’une météorite près de la Terre (*)
JG
GM T m JJG
u r , conformément à l’étude
Le mouvement est à force centrale, f = −
r2
énergétique (question 16.) la trajectoire est une conique avec un point à l’infini où
v ∞ = V0 ≠ 0 : c’est une branche d’hyperbole.
Les constantes du mouvement sont le moment cinétique et l’énergie. Le calcul de σ
avec les conditions initiales, se fait comme à la question 48. :
1
σ = mV0 d et E = m V0 2
2
Le point de la trajectoire le plus proche de O , rmin = r1 , correspond à r = 0 , donc la
JG
vitesse en ce point v1 est orthoradiale. Il s’agit du sommet de la branche
d’hyperbole.
(1)
­mv1r1 = mV0 d
°
GM T m 1
®1
2
= mV0 2 (2)
° 2 mv1 − r
2
1
¯
2 g 0 RT2
d
r1 − d 2 = 0
et GM T = g 0 RT2 dans (2) : r12 +
On remplace v1 = V0
V02
r1
périe
e Na
Écol
tiona
le Su
racine positive
1
ª§ g R 2 · 2
º2
g0R
2
0 T
«
r1 = − 2 + ¨ 2 ¸ + d »
V0
«¬© V0 ¹
»¼
2
T
&KDSLWUH
La condition pour que la météorite ne heurte pas la Terre est r1 > RT :
1
2
2
ª§ g R 2 · 2
º2
§ g 0 RT2 ·
ª
g 0R
g 0 RT2 º
2
2
0 T
− 2 + « ¨ 2 ¸ + d » > RT ¨ 2 ¸ + d > « RT +
»
V0
V02 ¼
«¬© V0 ¹
»¼
© V0 ¹
¬
g R3
2 g R3
d 2 > RT2 + 2 0 2 T V02 > 2 0 T 2
V0
d − RT
6907
3955
8
2
T
1
33.1
La condition est donc :
91:1
§ 2 g R3 · 2
V0 > V m = ¨ 2 0 T 2 ¸
© d − RT ¹
0428
318:
8891
2320
:105
.71.1
La réponse est cohérente avec le fait que si d < RT , le choc est inévitable.
Ce calcul simplifié s’applique aux astéroïdes dits géocroiseurs, car dans leur orbite
autour du Soleil (périhélie 0,9 UA et aphélie 1,1 UA) ils recoupent deux fois l’orbite
terrestre. On estime leur nombre à environ 3.10 6 , dont 900 de taille supérieure à
1 km !
On s’intéresse notamment à Apophis (300 m et 7.10 6 tonnes ) qui pourrait passer en
2029 à moins de 30 000 km de la Terre. Les autres passages inquiétants étant pour
2036, 2068…
:211
4XHVWLRQVRXYHUWHV
techn
iques
51. Oscillations d’un liquide dans un tube en U sous l’effet de la gravité (*)
Indications : Considérer l’ensemble du fluide et lui appliquer une méthode
énergétique.
Micro
Le différentiel de hauteur entre le niveau de gauche et celui de droite met, par
gravité, le fluide en mouvement ; il acquiert une énergie cinétique qui ne s’annule
que pour z = −η 0 d’où des oscillations (non amorties en l’absence de frottement).
le Su
périe
ure d
Pour évaluer l’énergie potentielle, décomposons la masse de fluide en 3 parties
comme sur la figure ci-dessous.
Le fluide à un instant donné (variable η ) a la même énergie potentielle que le fluide
au repos (constante lorsque η = 0 ) à laquelle on ajoute celle de la petite masse de
gauche de centre de masse G1 à l’altitude η / 2 et on retranche celle de la petite
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
masse de droite de centre de masse G2 à l’altitude −η / 2 , d’où par « mgz » :
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
L’eau est un fluide incompressible de masse volumique ρ , et comme la section S
du tube est uniforme le long du tube, en tout point du fluide la norme de la vitesse
du fluide est la même (la norme de la vitesse est elle-même uniforme). À cause de
ce déplacement « en bloc » cette vitesse est v = η , et avec une masse d’eau totale
m = ρ SL , l’énergie cinétique du fluide est :
1
1
Ec = mv 2 = ρ SLη 2
2
2
η
§ η·
− ( ρ Sη ) g ¨ − ¸
2
© 2¹
=
9
+
9
•
−
9
•
G2
91:1
G1
6907
3955
8
E p = cste + ( ρ Sη ) g
.71.1
33.1
En choisissant l’énergie potentielle du système au repos (η = 0) nulle, on a
cste = 0 , il vient :
E p = ρ Sgη 2
318:
8891
2320
:105
En l’absence d’effets dissipatifs l’énergie mécanique du système est conservée :
1
Em = Ec + E p = cste
ρ SLη 2 + ρ Sgη 2 = cste
2
Il suffit alors de dériver par rapport au temps :
2g
+ 2 ρ Sgηη = 0 η + η = 0
ρ SLηη
L
2π
ω
= 2π
L
= 0,63 s
2g
:211
T=
2g
L
iques
AN : La période est
0428
conduisant à des oscillations harmoniques η (t ) = η 0 cos(ω t ) de pulsation ω =
techn
Cet ordre de grandeur est cohérent pour un système mécanique.
Micro
52. Période de révolution lunaire par Télémétrie laser
Indications : Il faut penser à appliquer la 3e loi de Kepler et bien choisir parmi les
seules données de l’énoncé...
4π 2 a 3
GM T
caniq
T=
(1)
e Mé
T2
4π 2
=
a 3 GM T
ue e
t des
La 3e loi de Kepler appliquée au mouvement de révolution de la Lune autour de la
Terre donne la relation entre le rayon a de la trajectoire lunaire quasi circulaire et sa
période T de révolution :
ure d
Dans un espace quasi vide entre la Terre et la Lune, la lumière se propage à la
vitesse c = 3.108 m.s −1 . Avec une durée de propagation pour l’aller-retour
τ = 2,56 s , la distance a entre les deux astres est donnée par 2 a = cτ :
e Na
Écol
tiona
le Su
périe
a = cτ / 2 = 3.108 × 2,56 / 2 = 3,84.108 m = 384 000 km (2)
&KDSLWUH
Il reste à trouver le produit GM T où M T est la masse de la Terre (la constante de
gravitation G n’est pas donnée). Pour la Terre, dans le cadre du modèle sphérique,
GM T
d’où la constante :
le champ de gravitation à la surface est g 0 =
RT2
6907
3955
8
GM T = g0 R T2 = 9,81 × (6380.103 ) 2 = 4,00.1014 m 3.s−2 (3)
Les résultats numériques (2) et (3) portés dans la formule (1) conduisent à :
1/2
33.1
91:1
§ 4π 2 × (3,84.108 )3 ·
6
T =¨
¸ = 2,36.10 s soit T = 27, 3 jours
14
4,00.10
©
¹
Il s’agit ici de jours solaires terrestres.
2320
:105
.71.1
Cette période sidérale (dans le référentiel géocentrique) ne doit pas être confondu
avec la lunaison de 29,5 jours (période entre deux nouvelles lunes par exemple) ;
les deux périodes diffèrent en raison du mouvement de révolution de la Terre autour
du Soleil. C’est l’analogue de la différence entre jour solaire et jour sidéral, voir la
question 10..
8891
Rq : Deux données de l’énoncé sont inutiles...
iques
:211
0428
318:
53. Associations
Avant tout, il faut bien noter la différence de nature des courbes proposées :
– les figures 1, 2 et 3 correspondent à un régime libre : réponse temporelle,
élongation en fonction du temps.
– les figures 4, 5 et 6 correspondent à une réponse fréquentielle en RSF : pulsation
réduite ω / ω 0 en abscisse et amplitude relative des oscillations sinusoïdales en
ordonnée.
ure d
fig .3 ↔ fig .4 , fig .1 ↔ fig .5 et fig .2 ↔ fig .6
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
Il n’y a pas d’incohérence entre régime libre pseudopériodique et absence de
1
1
<Q≤
(par exemple Q = 0, 6 ).
résonance, ce qui se produit pour
2
2
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
e Mé
caniq
ue e
t des
Micro
techn
Les régimes libres sont pseudopériodiques (dans les trois cas), on en déduit un
facteur de qualité Q > 1 / 2 .
L’amortissement augmente dans l’ordre 3, 1, 2 donc Q3 > Q1 > Q2 .
Les réponses fréquentielles en amplitude (figures 4 et 5) correspondent à des
systèmes fondamentaux du second ordre avec un facteur de qualité Q > 1 / 2 :
passe-bas avec phénomène de résonance. La résonance est plus aiguë sur la figure 4
donc Q4 > Q5 .
La réponse fréquentielle en amplitude (figure 6) correspond à un passe-bas :
fondamental du second ordre avec un facteur de qualité Q ≤ 1 / 2 .
Finalement Q4 > Q5 > Q6 et les associations sont :
54. (MPSI) Observation d’une étoile double
Indication : S’aider de la question 44.
iques
:211
0428
318:
8891
2320
:105
.71.1
33.1
91:1
6907
3955
8
Exploitation du document
Les positions du centre de masse aux diverses dates sont obtenues à l’intersection de
la trajectoire de G et du segment reliant les positions des deux étoiles à cette même
date.
Ces positions de G sont cohérentes avec un mouvement rectiligne et uniforme dans
le référentiel de Copernic, correspondant bien à un système isolé pour l’ensemble
des deux étoiles.
Le système n’est pas très éloigné (8,6 a.l.), le mouvement de G (mouvement propre
par rapport au Soleil) est visible sur quelques années.
m GM 2
permet une mesure expérimentale du rapport
La relation barycentrique 1 =
m2 GM 1
des masses. Le document fournit une série de mesures (8 mesures exploitables) de
GM 2
≈ 2, 0 .
valeur moyenne :
GM 1
La période commune aux deux astres semble être de 50 ans, par exemple entre 1920
et 1970 ou entre 1960 et 2010 (deux directions parallèles de M 1M 2 ), la précision est
faible, il faudrait des dates plus rapprochées.
Le plan contenant les trajectoires forme un angle inconnu avec le plan
perpendiculaire à la ligne de visée (celui de la représentation). La plus grande
distance apparente entre A et G , par exemple, ne correspond pas forcément à
l’apogée réel de la trajectoire de A . On ne peut donc pas faire de mesure directe du
demi-grand axe a .
techn
Détermination des masses
On convertit les demi-grands axes angulaires en U.A. avec a = d α :
Micro
π
­
16
= 2,0 4 1012 m ≈ 13,6 U.A.
°a2 = 8, 6 10 × 4,9
180 × 3600
®
°¯a = 9, 6 1011 m ≈ 6, 4 U.A.
1
caniq
ue e
t des
La 3e loi de Kepler généralisée (voir la question 44.) s’écrit :
4 π 2a 3
avec a = a1 + a 2
( m1 + m2 ) =
GT 2
a03 G M S
De plus pour la Terre autour du Soleil
=
,
T02 4 π 2
e Mé
2
ure d
soit
3
§a· T
( m1 + m2 ) = M S ¨ ¸ §¨ 0 ·¸
© a0 ¹ © T ¹
§ 13, 6 + 6, 4 · § 1 ·
AN : ( m1 + m2 ) = M S ¨
¸ ¨ ¸ = 3, 2 M S
1
©
¹ © 50 ¹
2
e Na
Écol
tiona
le Su
périe
3
&KDSLWUH
Le document fournit
3, 2
m1
≈ 2, 0 m2 = M S
≈ 1,1 M S
1 + 2, 0
m2
6907
3955
8
m 2 ≈ 1,1 M S et m1 ≈ 2,1 M S
Les masses sont proches de la masse du Soleil.
:105
2320
2Gm
d
m2
= − G 2 (1) ω 2 = (2π f )2 = 3
d
2
d
• M2
.71.1
33.1
G
×
f =
8891
− mω2
91:1
55. Évolution d’un système de deux étoiles à neutrons
Le système étant isolé, le référentiel ( R ) dans lequel le
centre de masse G est immobile est galiléen. Le
mouvement des deux astres se fait dans le même plan ; M 1 •
en mouvement circulaire l’un par rapport à l’autre, ils
restent diamétralement opposés par rapport à G .
On applique à M 1 seul la relation fondamentale de la
dynamique dans ( R ) :
Gm
2π 2d 3
(1)
0428
318:
Rq : On reconnaît la 3e loi de Kepler généralisée, où il intervient la somme des deux
T2
4π 2
, voir à ce sujet les questions 36. ou 44..
masses en interaction : 3 =
a
G (m + m)
iques
:211
Le système des deux masses identiques en interaction est identique à lui-même au
bout d’un demi-tour, la période du signal émis est donc la moitié de la période de
révolution, et par conséquent sa fréquence est double.
v2
m2
= −G 2
d /2
d
mv 2 =
Gm 2
2d
soit
ue e
t des
Avec (1) : − m
Micro
1
Gm 2
Em = 2 × mv 2 −
2
d
techn
L’énergie mécanique du système est :
Em = −
Gm 2
2d
(2)
ure d
e Mé
Conclusion : Le système d’étoiles doubles s’effondre sur lui-même en tournant de
plus en plus vite et en émettant des ondes gravitationnelles de
fréquence de plus en plus élevée.
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
La première observation expérimentale des ondes gravitationnelles, en 2016, est une
découverte majeure de la physique du 21e siècle.
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
Le système en rotation rapide rayonne des ondes gravitationnelles donc son énergie
mécanique diminue ; on déduit (attention au signe − ) de l’expression (2) que la
distance d entre les astres diminue. Et donc d’après l’expression (1) que la
fréquence f augmente.
6907
3955
8
k G
56. (MPSI) Nature des trajectoires dans un champ de force en − 7 ur ( k > 0 ) (*)
r
Indications : Cette question peut être abordée uniquement de manière graphique
(après avoir tracé la courbe de l’énergie potentielle effective comme
pour les forces gravitationnelles à la question 16., mais avec une
différence notable) ; l’étude graphique et la réflexion physique lorsque
la vitesse initiale v0 change conduisent-elles aux mêmes résultats ?
Comment conclure ?
.71.1
33.1
91:1
k G
Comme pour la force de gravitation, n = 2 , la force − 7 ur ( k > 0 ) est centrale (et
JG JJJGr
attractive), le moment cinétique est conservé, L = cste , et donc le mouvement est
plan ; la relation fondamentale de la dynamique en coordonnées polaires s’écrit :
:105
k
m (
r − rθ 2 ) = − 7
r
2320
m d 2
m (2 rθ + rθ) = 0 =
( r θ ) L = mr 2θ = cste
r dt
8891
r
On ramène l’étude à 1D (en éliminant θ ) à l’aide
de l’énergie potentielle effective :
Veff ( r ) = −
θ
k
L2
+
6r 6 2 mr 2
:211
G
ur
318:
O
M
0428
dV
k
L2
mr = − 7 + 3 = − eff
r
mr
dr
G
f
G
uθ
iques
limitant le problème à l’étude du mouvement radial à un paramètre.
Micro
techn
Veff ( r )
β / r2
rm
−α / r
r
6
e Mé
caniq
O
ue e
t des
ΔV
e Na
Écol
tiona
le Su
périe
ure d
Contrairement au cas n = 2 , cette fois pour r → 0 , c’est l’effet d’attraction qui
l’emporte et pour r → ∞ c’est l’effet d’inertie qui l’emporte. Il n’y a plus de creux
(cuvette de potentiel), mais une bosse (barrière de potentiel) donnée par :
1/4
dVeff
L3
§ mk ·
= 0 rm = ¨ 2 ¸
et ΔV =
dr
3m 3/2 k 1/2
© L ¹
&KDSLWUH
G
v0
Dans toute la suite la masse m , l’intensité de la force
(par k et n ) et le paramètre d’impact b ≠ 0 sont fixés,
en revanche la vitesse initiale v0 est variable (lorsque
91:1
* cas E2 > ΔV : le mobile M
s’écrase
sur
le
centre
attracteur O en s’enroulant
autour, r → 0 avec v → ∞ .
Ec
Ep
rm
E2
E1
r
2320
O
33.1
ΔV
b
.71.1
* cas E1 < ΔV : il s’agit d’un
état de diffusion avec une
distance d’approche minimale
et une augmentation ensuite
Veff (r )
×
:105
Étude issue de la courbe :
6907
3955
8
•
O
r → ∞ ), et donc le moment cinétique L = mv0b et
l’énergie mécanique sont des grandeurs à ajuster.
M
8891
Étude qualitative :
0428
•
iques
:211
•
G
v0
318:
G
v0
Micro
techn
figure de gauche : si v0 faible, l’attraction l’emporte sur l’inertie et le mobile M
s’écrase sur le centre attracteur O en s’enroulant autour de plus en plus vite
figure de droite : si v0 élevée, l’inertie l’emporte sur l’attraction et le mobile M est
dévié sans tomber sur le centre attracteur O (état de diffusion)
ue e
t des
La réflexion physique contredit l’étude de la courbe !
L est conservé au cours du mouvement, mais d’un cas à l’autre v20 > v10 , d’où
1/4
m 3/2b3 3
§ mk ·
ΔV =
=
v0 et rm = ¨ 2 ¸
3/2 1/2
1/2
3m k
3k
© L ¹
e Mé
L3
1/4
§ k ·
=¨ 2¸
© mb ¹
1
v0
et donc la barrière de potentiel est de position rm et de hauteur ΔV variables avec
ure d
v0 . Lorsque v0 augmente, la hauteur de la barrière en v03 augmente plus vite que
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
l’énergie mécanique en v02 .
Cherchons la condition pour que E < ΔV , soit :
1 2 m 3/2b3 3
3 k /m
mv0 <
v0 v0 >
!
2
3k 1/2
2 b3
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
caniq
E 2 > E 1 et L 2 > L1 car L = mbv0 (seule v0 augmente).
Veff (r )
Veff (r )
E2
rm
rm
O
r
6907
3955
8
ΔV
O
ΔV
E1
v0 grande
33.1
91:1
v0 faible
r
:105
.71.1
On comprend maintenant pourquoi E < ΔV E > Emin . Tout va très bien !
:211
0428
318:
8891
2320
57. Station Spatiale Internationale (ISS) (*)
Ź La latitude maximale atteinte par la projection sur la sphère terrestre correspond à
l’inclinaison du plan orbital (contenant le centre du modèle sphérique de la
Terre). On mesure crête à crête 6, 6 cm , la latitude de Paris, 48°52’ correspond à
6, 6
= 53° , la valeur expérimentale est de 51,6°.
3, 0 cm 48,87
2 × 3,0
On peut également déterminer cette inclinaison avec l’angle que forme la
tangente à la trajectoire avec l’équateur.
23, 4
= 5600 s ≈ 1 h 33 min
360
ure d
T = 86164
e Mé
caniq
ue e
t des
Micro
techn
iques
Ź Chaque tour l’orbite projetée se décale, on peut mesurer 4 décalages sur
l’équateur, pour améliorer la précision (comme pour une mesure de déphasage).
5, 6
= 1, 4 cm .
On obtient, en cm :
4
L’écart en longitude entre Paris et New York est de 283,8° (attention aux
longitudes Est et Ouest), représenté par une distance de 17,0 cm. Le décalage
1, 4
angulaire est donc : 283,8
= 23, 4° .
17
Si la Terre ne tournait pas sur son axe dans le référentiel géocentrique, la
projection du mouvement de l’ISS recouperait l’équateur toujours au même point
de la sphère terrestre. Comme la Terre tourne, pendant une période orbitale de
l’ISS (deux passages par l’équateur dans le même sens, par exemple Sud →
Nord) la Terre a donc tourné de 23,4°. Elle fait un tour sur elle-même, 360°, en
86164 s, la période orbitale est donc :
périe
C’est bien l’ordre de grandeur de la période des satellites en orbite basse
e Na
Écol
tiona
le Su
Ź La période fixe le rayon de la trajectoire supposée circulaire, 3e loi de Kepler :
&KDSLWUH
1
6907
3955
8
§ G MTT 2 ·2
6
r=¨
¸ = 6,80 10 m h ≈ 420 km
2
4
π
©
¹
En pratique la trajectoire n’est pas exactement circulaire, l’altitude varie entre
350 km et 420 km.
58. Les notations sont celles des questions 1. à 4.
−
cos (ω t + ϕ ) .
T
.71.1
Deux maximums successifs sont séparés de T et z m 2 = z m1 e
2Q
ω0
t
33.1
a) On observe un régime libre pseudopériodique, z (t ) = A e
ω0
−
91:1
7UDYDX[SUDWLTXHV
2Q
.
:105
Il faut donc mesurer les maximums z m et porter ln z m en fonction de t. On
Q
techn
ω0
= 0, 20 s −1 ; on en déduit :
2Q
= 8,0.10 − 2 kg.s −1 , l’incertitude sur m est négligeable (balance
ue e
t des
électronique).
périe
ure d
e Mé
caniq
b) Pour la pseudopériode, mesurer une dizaine de T entre des zéros de z (t ) , d’où
T = 0,80 s . Incertitude sur 10 T :
1
2×
× 2 = 1,15 mm , 2 lectures sur le graphe (on ne convertit
lecture :
12
pas en seconde, on exprimera des pourcentages) et à 95%
appareil : graduations : négligeable
1
U
U (T ) =
U a2 ≈ 0,12 mm
≈ 0, 01 T = (0,80 ± 0, 01) s
10
T
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
On en déduit le décrément logarithmique par δ =
ω0
2Q
T = 0,16 .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
λ=m
ω0
Micro
donner deux chiffres significatifs :
iques
:211
0428
318:
8891
2320
obtient des points raisonnablement alignés. L’incertitude de mesure sur z m :
1
2×
× 2 = 1,15 mm car : 2 lectures sur le graphe (on ne
lecture :
12
convertit pas en cm réel, on exprime des pourcentages) et à 95%
protocole : position du zéro, estimé 0,5 mm
appareil : convertisseur, ordinateur, imprimante : négligeable
U
U = U a2 + U b2 ≈ 0, 76 mm
≈ 0, 04 en considérant la même incertitude
zm
relative sur toutes les mesures alors qu’elle est plus grande pour les petits z m .
On conclut à un alignement compatible avec la dispersion liée aux incertitudes.
Une régression linéaire donne la pente et l’incertitude sur cette pente permet de
Avec ω 2 = ω 02 −
ω 02
4 Q2
soit k / m = ( 2π T ) +
ω 02
2
4 Q2
,
on trouve k = 12 N.m − 1 compatible avec un allongement à l’équilibre d’environ
6907
3955
8
15 cm pour 200 g.
2320
:105
.71.1
33.1
91:1
59. La mesure de l’aire balayée par le rayon vecteur pendant 80 ms est ramenée à celle
des aires des secteurs de type OM i M i +1 . Par exemple pour l’aire balayée entre M 1
1
et M 2 , on assimile l’aire à l’aire du triangle OM 1M 2 , soit ΔS = (OM 2 ) h , ce qui
2
donne comme aires successives en cm 2 : 38,0 ; 37,8 ; 37,8 ; 37,5 ; 38,7 ; 37,5 ; 38,4.
0428
318:
8891
M5
M 3′
:211
M2
M1
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
10 cm
M4
M3
iques
O
M ′4
&KDSLWUH
On veut montrer ici que la valeur de l’aire reste sensiblement constante, le
traitement statistique n’est pas approprié. On trace ΔS en fonction de t :
§ U ( L) ·
§ U (h) ·
¨
¸ +¨
¸ = 0,048
© L ¹
© h ¹
2
91:1
2
33.1
U1
=
ΔS
6907
3955
8
L’incertitude sur ΔS est composée :
1
= 0,58 mm
Sur OM 2 = L : lecture 2 ×
12
1
= 0,58 mm
Sur h : lecture 2 ×
12
U2
= 0, 01 ,
ΔS
cette erreur n’intervient pas pour vérifier que ΔS est constant, car elle affecte toutes
les mesures de la même façon. De plus son effet est négligeable :
2
:105
.71.1
Le protocole confond l’arc et la corde, soit une erreur systématique :
2
§ U ( ΔS ) ·
§ U ( Δt ) ·
¨
¸ +¨
¸ =
© ΔS ¹
© Δt ¹
2
ΔS
= (9, 5 ± 0, 5).10 −2 m 2 .s −1
Δt
e Na
Écol
2VFLOODWHXUVHWIRUFHVFHQWUDOHV
tiona
le Su
périe
ure d
e Mé
La construction du vecteur accélération, par exemple en M 4 , se fait avec
G
G
G
G
Δv v M 4′ − v M 3′
G
G dv
, or v M 4′ ,que l’on considère comme la vitesse moyenne
a =
≈
=
dt
Δt
Δt
JJJJJJJG
G
entre M 4 et M 5 , est colinéaire et de norme proportionnelle à M 4 M 5 . Donc a est
JJJJJJJG JJJJJJJG
colinéaire au vecteur M 4 M 5 + M 4 M 3 . La construction sur le schéma ci-dessus
JJJJG
G
montre que a ainsi construit est bien expérimentalement porté par OM .
5pSRQVHVDX[TXHVWLRQV
■ Réponses aux questions
C =2
2
§ 0, 03 ·
2
( 0.05) + ¨
¸ ≈ 0.053
© 3 ¹
caniq
soit
2
ue e
t des
U
=
C
Micro
techn
iques
:211
0428
318:
8891
2320
§ U1 ·
§U2 ·
¨ Δ ¸ + ¨ Δ ¸ ≈ 0, 049
S
©
¹
© S¹
L’incertitude sur ΔS est de 0, 049 × 38 ≈ 2 cm 2 . Les écarts à la droite moyenne
sont justifiés.
D’autres causes d’erreur peuvent apparaître, les frottements qui se traduisent par une
diminution de ΔS . Il y a aussi le problème de l’horizontalité de la table qui entraîne
une erreur systématique que l’on peut déceler en lançant le mobile du coin opposé
de la table.
On constate finalement une valeur sensiblement constante avec une dispersion dont
l’ordre de grandeur est compatible avec les incertitudes de mesure. Ceci permet de
conclure à la loi des aires avec une surface moyenne balayée en 80 ms de
ΔS
= 9, 5.10 −2 m 2 .s −1 .
(38 ± 2) cm 2 , soit une constante des aires : C = 2
Δt
L’incertitude sur C est, avec une précision de 3% du générateur d’impulsion :
U
=
ΔS
M1
M2
Terre
θ1
J
d
91:1
θ2
6907
3955
8
60. La détermination de a nécessite d’estimer le maximum de la courbe qui n’est pas
forcément un des points de mesure ! Attention c’est une sinusoïde, elle n’a pas une
forme très aplatie. a est de l’ordre de 2,8.10 −3 U.A. . Pour la période, on choisit deux
positions M 1 et M 2 .
Orbite satellite
.71.1
33.1
Entre les dates t1 et t 2 (positions M 1 et M 2 ) le satellite balaye l’angle
2π
β = π − θ 1 − θ 2 , le mouvement étant circulaire et uniforme : T = (t 2 − t1 )
. On
β
x
. Prendre deux points de part et d’autre du
a
maximum, sur la courbe x (t ) lissée, déterminer θ 1 et θ 2 et en déduire T en heures.
T est de l’ordre de 42 h.
8891
2320
:105
détermine β sachant que sin θ =
:211
1,87 10 27 kg < M J < 2, 00 10 27 kg
0428
318:
L’ensemble des valeurs mesurées traitées statistiquement donne : M J = 1,935 ,
s
0, 203
≈ 0, 07
s n = 0, 203 et à 95% t 36 = 2, 04 t n n = 2, 04 ×
n
36
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
techn
iques
La valeur admise pour la masse de Jupiter est 1,91.10 27 kg .
Les erreurs systématiques liées aux axes références et à la position du centre de
Jupiter, peuvent être décelées et corrigées en considérant les quatre satellites. Une
erreur sur la distance de Jupiter au moment de l’observation ne peut évidemment pas
être décelée, il faut refaire des mesures plus tard, à une autre opposition.
&KDSLWUH
91:1
.71.1
33.1
/HVRUGUHVGHJUDQGHXUXWLOHV
&RQVWDQWHV
constante des gaz parfaits
constante d’Avogadro
constante de Boltzmann
2320
:105
R = 8,31 J.K−1.mol−1
NA = 6,02.1023 mol−1
kB = R / NA = 1,38.10−23 J.K−1
8891
/·DLU PRGqOH*3GLDWRPLTXH masse molaire
masse volumique (à 20 °C sous 1 bar)
volume molaire (à 20 °C sous 1 bar)
densité particulaire (à 20 °C sous 1 bar)
vitesse quadratique moyenne (à 20 °C)
capacité thermique molaire à volume
constant
capacité thermique molaire à pression
constante
capacité thermique massique à pression
constante
rapport des capacités thermiques
/·HDX
masse molaire
masse volumique (liquide)
capacité thermique de l’eau liquide
densité moléculaire (liquide)
masse volumique de la glace
capacité thermique de la glace
enthalpie massique de fusion de la
glace à 0 °C
enthalpie massique de vaporisation
de l’eau à 100 °C
vapeur : masse volumique
capacité thermique (100 °C, 1 bar)
:211
0428
318:
M = 29 g.mol−1
ρ = MP / RT ≈ 1,2 kg.m−3
Vm = RT / P ≈ 24 L.mol−1
n* = P / kBT ≈ 2,5.1025 m−3
u = 3RT/M ≈ 500 m.s−1
iques
CVm = 5R / 2 = 21 J.K−1.mol−1
techn
CPm = 7R / 2 = 29 J.K−1.mol−1
Micro
cp = 1,0 kJ.K−1.kg−1
ue e
t des
γ = CP / CV = cP / cV ≈ 1,4
M = 18 g.mol−1
ρl = 103 kg.m−3
c = 4,18 kJ.kg−1.K−1
n* = ρNA / M ≈ 1028 m−3
ρg = 0,92. 103 kg.m−3
c = 2,1 kJ.kg−1.K−1
caniq
e Mé
ure d
périe
le Su
tiona
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
6907
3955
8
&KDSLWUH
3URSULpWpVGHVV\VWqPHV
WKHUPRG\QDPLTXHV
lf = Δfh = 334 kJ.kg−1
lv = Δvh = 2260 kJ.kg−1
ρv = 0,59 kg.m–3
cp = 2,0 kJ.kg−1.K−1
TT = 273,16 K = 0,01 °C ; PT ≈ 6.10−3 bar
TC ≈ 374 °C ; PC ≈ 220 atm
point triple
point critique
6907
3955
8
/HFRXUVG·DERUG
91:1
'pILQLWLRQHWFDUDFWpULVWLTXHVG·XQIOXLGH
33.1
1. Quelle définition peut-on donner d’un fluide ? Et parmi les fluides, d’un liquide ?
d’un gaz ?
:105
.71.1
2. Définir la masse volumique en un point d’un fluide. Comment est définie la
densité ? Qu’est-ce qui distingue les masses volumiques des gaz et des liquides ?
2320
3UHVVLRQGDQVXQIOXLGH
318:
8891
3. Comment peut-on définir simplement la pression P ( M ) en un point M d’un fluide ?
Quelle est son unité dans le système international ? Qu’entend-on par « isotropie »
de la pression ?
0428
4. Qu’est-ce qui distingue la pression dans un gaz et dans un liquide en équilibre ?
:211
$VSHFWPLFURVFRSLTXH
ue e
t des
Micro
techn
iques
5. Soit un système constitué de 3 g d’eau, combien contient-il de molécules ? Combien
de paramètres faut-il pour décrire ce système d’un point de vue mécanique ? Une
étude expérimentale macroscopique montre que le nombre de paramètres
nécessaires à la description de ce fluide est seulement de deux pour la plupart des
conditions d’évolution : pression et température ou volume et température par
exemple. Comment expliquer cette réduction surprenante du nombre de paramètres
à connaître ?
caniq
6. (PTSI) Qu’est-ce que l’échelle mésoscopique ? Comment choisir l’élément de
volume dV en un point M du fluide, pour pouvoir définir par exemple la densité
moléculaire n ∗ en tout point M du fluide ?
e Mé
9RFDEXODLUHHWGpILQLWLRQVGHODWKHUPRG\QDPLTXH
périe
ure d
7. Quelle définition peut-on donner d’une variable thermodynamique ou variable
d’état ? Qu’appelle-t-on variable intensive, extensive ? Donner des exemples.
Qu’appelle-t-on variables d’état indépendantes ? Donner un exemple. Qu’appelle-ton fonction thermodynamique ? Pourquoi parle-t-on de fonction d’état ?
e Na
Écol
tiona
le Su
8. Comment peut-on caractériser l’équilibre d’un système thermodynamique ? Préciser
cette notion dans le cas particulier d’un équilibre thermomécanique.
&KDSLWUH
9. Quand dit-on qu’un système en interaction avec un milieu extérieur subit une
transformation ?
6907
3955
8
10. À quelle condition peut-on considérer que les variables d’état sont définies pendant
une transformation ? L’illustrer sur l’exemple de la compression d’un gaz par
déplacement d’un piston. Quand peut-on dire qu’une transformation est réversible ?
Citer des causes d’irréversibilité.
33.1
91:1
11. Définir les transformations dites respectivement isobare, monobare, isotherme,
monotherme, isochore et enfin adiabatique.
.71.1
12. Quelle différence convient-il de faire entre un système fermé et un système isolé ?
8891
2320
:105
13. Qu’appelle-t-on équation d’état ? Considérer un système de type ressort en
mécanique : quelles variables décrivent a priori l’état de ce système ? Sont-elles
indépendantes ? Quelle équation d’état peut-on écrire ? Combien de variables sontelles nécessaires et suffisantes pour décrire l’état du ressort ? Quelles conditions
expérimentales remettent en cause cette conclusion ?
:211
0428
318:
14. À quoi correspond la notion de température ? Distinguer deux températures par le
critère « plus chaud, plus froid » est-il fiable ? Quel phénomène physique semble
permettre une mesure de la température, comment procéder alors à cette
« mesure » ? Pourquoi les thermomètres à dilatation ne permettent-ils pas une
véritable mesure de température ? À quoi servent-ils alors ?
iques
15. Définir un thermostat.
ue e
t des
Micro
techn
16. (PTSI) Donner l’équation d’état du modèle de comportement des gaz, dit des gaz
parfaits, en expliquant chaque terme. Dans quelles conditions, un gaz se comporte-til pratiquement comme un gaz parfait ? Donner l’expression de la masse volumique
ρ en fonction de la température T et de la pression P dans le cadre de ce modèle,
en notant M la masse molaire.
3URSULpWpVGHVJD]DX[IDLEOHVSUHVVLRQV 036, T = cste
V
le Su
périe
ure d
e Mé
caniq
17. (MPSI) Lors de l’étude expérimentale d’un gaz,
P
comment peut-on mesurer P et V ? Comment savoir
que la température reste constante ? On donne ci- 1 bar
contre des résultats expérimentaux aux faibles
pressions (inférieures à 1 bar).
Quel modèle peut être envisagé pour la fonction
P(V) ? Expliquer comment un tracé des mêmes
points expérimentaux dans le diagramme d’Amagat
(PV en fonction de P) permettrait de tester le modèle.
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
18. (MPSI) Comment les propriétés des gaz aux faibles pressions permettent-elles une
mesure de température ? Qu’appelle-t-on échelle légale de température ? Comment
en déduit-on l’échelle Celsius ? Quel système sert de référence pour la température
absolue ?
6907
3955
8
19. (MPSI) Comment, à partir de l’étude de la question 17., en arrive-t-on au modèle
expérimental du gaz parfait (noté GP) et à son équation d’état ?
eQHUJLHLQWHUQH
91:1
20. Comment définir l’énergie interne d’un gaz parfait monoatomique ?
33.1
21. Comment étendre la définition précédente à un gaz parfait polyatomique ?
:105
.71.1
22. Comment interpréter l’écart de comportement des gaz réels par rapport au modèle
GP, ((MPSI) voir les graphes de la question 17.) ? Quelle est la conséquence sur la
définition de leur énergie interne ?
318:
8891
2320
23. Donner la définition de la capacité thermique à volume constant d’un gaz parfait,
puis des capacités thermiques à volume constant molaire et massique. Traiter le cas
particulier des GP monoatomique et diatomique. Qu’appelle-t-on gaz parfait idéal
(noté GPI) ?
0428
24. Comment s’exprime simplement la notion d’énergie interne pour une phase
condensée incompressible et indilatable ?
:211
&RUSVSXUGLSKDVpHQpTXLOLEUH
Micro
techn
iques
25. Commenter dans le diagramme de Clapeyron ( P, v ) , les isothermes d’Andrews pour
des températures autour de la température critique, données ci-dessous (v est le
volume massique). Indiquer les domaines des différents états. Définir la courbe de
saturation.
ue e
t des
P
•A
" ébullition "
e Mé
•
ure d
B
rosée
v
périe
PV (T )
caniq
C
•
e Na
Écol
tiona
le Su
26. Définir le titre en vapeur du système liquide-vapeur à l’équilibre.
&KDSLWUH
27. Commenter le diagramme d’équilibre ( P, T ) de l’eau et indiquer le domaine de
chaque état.
P
6907
3955
8
•C
1 atm
T
33.1
91:1
•
.71.1
0 °C 100 °C T
:105
eQHUJLHG·XQV\VWqPHWKHUPRG\QDPLTXH
8891
2320
28. L’énergie mécanique est-elle conservative ? Comment est définie l’énergie d’un
système fermé et dans quel but ? Donner la signification précise de chaque terme.
318:
29. Quelles sont les deux formes d’échange d’énergie ? Comment est algébrisé
l’échange ? Donner des exemples d’échange sous forme de travail.
iques
:211
0428
30. Le transfert thermique (ou échange de chaleur) peut se faire notamment par
conduction, décrire ce processus d’échange.
(PTSI) Le transfert thermique peut aussi se faire suivant d’autres processus :
convection et rayonnement. Donner les caractéristiques et des exemples de chaque
processus.
techn
7UDYDLOGHVIRUFHVGHSUHVVLRQ
ue e
t des
Micro
31. Établir l’expression δ W = − Pext .dV du travail des forces de pression où Pext . est la
pression extérieure (atmosphère, poids, opérateur,…) s’exerçant par exemple sur le
piston mobile d’une enceinte contenant un gaz. Par quel système ce travail est-il
reçu ?
caniq
32. Comment en déduit-on le travail reçu par le gaz et sous quelles conditions à préciser
peut-on affirmer que ce dernier vaut δ W = − PdV où P est la pression du gaz ?
e Mé
33. Donner les deux cas où le travail des forces de pression s’exprime simplement lors
d’une transformation non élémentaire.
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
le Su
périe
ure d
34. Pour un système décrivant un cycle mécaniquement réversible, représenté dans un
diagramme de Clapeyron, interpréter graphiquement le travail des forces de pression
reçu par ce système.
3UHPLHUSULQFLSHGHODWKHUPRG\QDPLTXH
6907
3955
8
35. Énoncer le premier principe de la thermodynamique. Comment s’écrit-il lorsque le
système est « purement » thermodynamique ?
36. Dans cette question, le seul travail reçu est celui des forces de pression. Que donne
le premier principe pour une transformation isochore ? Pour une transformation
monobare entre deux états d’équilibre ? En déduire la notion d’enthalpie.
33.1
91:1
37. Donner la définition de la capacité thermique à pression constante d’un fluide réel,
puis des capacités thermiques à pression constante molaire et massique.
8891
2320
:105
.71.1
38. Établir la relation entre les capacités thermiques à volume constant et à pression
C
c
constante pour un GP (relation de Mayer). On pose γ = P = Pm , exprimer, pour
cV
CVm
un GP, les capacités thermiques en fonction de γ et en déduire la valeur de γ pour
un GP monoatomique puis pour un GP diatomique dans des conditions usuelles de
température et pression. Établir enfin pour un GPI les variations d’énergie interne et
d’enthalpie lors d’une transformation quelconque.
iques
:211
0428
318:
39. Regrouper dans un tableau les expressions de la variation d’énergie interne, de la
variation d’enthalpie, de la capacité thermique à volume constant ( mcV ), de la
capacité thermique à pression constante ( mc P ), de mc P − mcV et de γ pour : un GP
monoatomique, un GP diatomique dans des conditions usuelles, un GPI, un GP
quelconque et une phase condensée.
techn
7UDQVLWLRQVGHSKDVH
Micro
40. Rappeler les noms des divers changements d’état (ou transitions de phase).
41. Comment sont définies les enthalpies de changement d’état ?
ue e
t des
42. Qu’est ce que le phénomène d’ébullition et dans quelles conditions se produit-il ?
e Mé
caniq
&RQVHLOVjVXLYUH(UUHXUVjpYLWHU
e Na
Écol
tiona
le Su
périe
ure d
Le vocabulaire de la thermodynamique est précis ; il faut l’utiliser à bon
escient.
Exemple : la transformation est adiabatique, mais la paroi est athermane ou
isolante (et non : « la paroi est adiabatique »)
Autre exemple : lors d’une transformation isobare, la pression P du système
reste constante alors que pour une transformation monobare, le système est en
contact mécanique avec le milieu extérieur qui fixe Pext . , mais où la pression P
&KDSLWUH
33.1
91:1
6907
3955
8
du système peut évoluer librement. Une transformation monobare quasi
statique est isobare.
Même distinction pour isotherme et monotherme (échange thermique avec un
seul thermostat) ; une transformation monotherme quasi statique est isotherme.
Attention au terme compression qui signifie diminution de volume, le contraire
de la détente. Rien à voir avec la pression qui n’augmente pas forcément quand
le volume diminue, il faudrait pour cela que la température reste constante !
Enfin, un point important, source d’incompréhension quand on débute la
thermodynamique, est de bien saisir la différence entre « chauffer », c’est-àdire fournir un transfert thermique, et « échauffer » qui signifie augmenter la
température (voir la question 64.).
:105
.71.1
Dans l’équation d’état PV = nRT , n représente la quantité de matière
(grandeur extensive en mol) dans le volume V , alors que dans P = n * k BT , n *
est la densité particulaire (grandeur intensive en m–3).
0428
318:
8891
2320
L’unité de température est le kelvin (symbole K) et non le « degré kelvin »
(°K). Le lien avec l’échelle Celsius est : T (K) = t (°C) + 273 . Les variations de
température sont identiques dans les deux échelles. En calorimétrie, où il
n’intervient souvent que des différences de température, on peut garder les °C
dans les applications numériques, mais dans tous les autres cas, pour les
applications numériques, il est indispensable d’utiliser T en kelvin.
techn
iques
:211
Le caractère intensif ou extensif des variables d’état apparaît également dans
les produits ou les rapports de ces variables. Il faut donc systématiquement
vérifier la cohérence de ces produits ou rapports :
le produit ext × int est ext ;
le rapport ext / ext est int
le rapport ext / int est ext ;
le produit ext × ext n’a pas de sens
De plus seules les grandeurs du même type s’additionnent (homogénéité !).
ure d
e Mé
caniq
ue e
t des
Micro
Quel que soit le gaz parfait, monoatomique, diatomique, idéal ou non, la
vitesse quadratique moyenne n’est déterminée que par l’énergie cinétique liée
1
3
aux 3 degrés du mouvement de translation : on a donc toujours Mu 2 = RT
2
2
et donc une même équation d’état macroscopique PV = nRT .
En revanche pour l’énergie interne, il s’agit bien de faire la somme de toutes
les contributions : l’énergie cinétique de translation (la seule pour un gaz
parfait monoatomique), les énergies de rotation ou de vibration (pour les
molécules polyatomiques), l’énergie potentielle d’interaction entre particules
(si le gaz n’est pas parfait). L’augmentation du nombre de formes d’énergie
cinétique microscopique conduit à des capacités thermiques de plus en plus
importantes.
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
le Su
périe
De manière générale, l’expression du travail des forces de pression, reçu par le
système incluant la paroi mobile, est δ W = − Pext .dV avec Pext . la pression
extérieure. Pour pouvoir appliquer δ W = − PdV reçu par le gaz, il faut que la
transformation soit effectuée de manière quasi statique et qu’il n’y ait pas
d’irréversibilité mécanique (frottement solide au niveau du piston). La
transformation est dite mécaniquement réversible.
33.1
91:1
6907
3955
8
Lorsque l’on exprime le travail des forces de pression comme la somme des
travaux élémentaires, ce travail dépend du chemin suivi et « l’intégrale » ne
peut être calculée que lorsque les caractéristiques de ce chemin sont injectées
dans le calcul. Or il est préférable d’utiliser la notation de l’intégrale de
Riemann, avec les bornes d’intégration seulement pour une différentielle et pas
pour une forme différentielle comme δ W , puisqu’à l’évidence pour procéder
au calcul il faut plus que les bornes d’intégration (c’est-à-dire l’état initial et
l’état final).
Par exemple il faut écrire : W = ³ p − PdV car − PdV n’est pas une
AB
2320
:105
.71.1
différentielle et le calcul nécessite le point de départ, le point d’arrivée et le
chemin suivi ; puis si par exemple la transformation AB est isotherme et le
système un gaz parfait, on injecte alors les caractéristiques de ce chemin :
V B dV
nRT
W = ³ p − PdV = ³ p −
dV = −nRT ³
AB
AB
VA V
V
318:
8891
Comme en mécanique, il convient toujours de bien définir le système étudié. Et
aussi de bien préciser, par exemple avant d’appliquer le 1er principe, le type de
transformation étudiée ainsi que les caractéristiques des états initial et final.
Micro
techn
iques
:211
0428
Il est essentiel de bien faire la distinction entre :
– la notation ΔU , variation d’énergie interne entre deux états, notation
réservée aux variations de fonctions d’état
– la notation Q , W qui donne une quantité de transfert thermique ou de travail
le long de la transformation ; elles dépendent de la transformation subie et ne
peuvent pas s’écrire a priori sous la forme d’une variation, même si pour
certaines transformations elles s’identifient à une variation de fonction d’état
car cette identification n’est valable que pour cette transformation. Les
notations « ΔW et ΔQ » sont à proscrire absolument !
caniq
ue e
t des
Il faut bien comprendre dans l’utilisation du premier principe que le type
d’énergie échangée (travail ou chaleur) ne préjuge en aucun cas de la forme
d’énergie du système dont la valeur est modifiée (énergie interne, sous toutes
ses formes, énergie cinétique macroscopique, énergie potentielle extérieure).
Voir en détail la question 66.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
L’écriture de la variation d’une fonction d’état peut recouvrir deux points de
vue différents, illustrés sur l’exemple suivant :
– point de vue « temporel » : un système d’enthalpie H = U + PV subit une
transformation au cours de laquelle son enthalpie varie de ΔH = H f − H i
– point de vue « spatial » : l’enthalpie est extensive, on peut écrire sa variation
comme la somme des variations des enthalpies de ses constituants :
ΔH = ΔH 1 + ΔH 2
&KDSLWUH
techn
iques
:211
0428
318:
8891
2320
:105
.71.1
33.1
91:1
6907
3955
8
Il faut donc être vigilant et toujours bien assigner une signification physique
auxfaut
grandeurs
quevigilant
l’on écrit.
Il
donc être
et toujours bien assigner une signification physique
aux grandeurs que l’on écrit.
L’écriture ΔU = ΔU 1 + ΔU 2 correspondant à une séparation spatiale du
système
L’écritureen Δdeux
U = constituants,
ΔU 1 + ΔU 2 s’appuie
correspondant
à une séparation
spatiale
du
sur l’extensivité
de la fonction
d’état
énergie
systèmeinterne.
en deux constituants, s’appuie sur l’extensivité de la fonction d’état
On
peutinterne.
également écrire que le travail total reçu par un système subissant
énergie
plusieurs
transformations
la somme
destotal
travaux
au cours
dessubissant
diverses
On peut également
écrireest
que
le travail
reçureçus
par un
système
transformations
successives
(au
sens
temporel)
:
W
=
W
+
W
.
plusieurs transformations est la somme des travaux reçusABau cours
BC des diverses
+
W
transformations
successives
(au sens
: W =etWne
Il
ne faut surtout
pas confondre
cestemporel)
deux sommes
jamais
AB
BC . écrire que le
travail
reçu
par
un
système
est
la
somme
des
travaux
reçus
par
sesécrire
constituants
Il ne faut surtout pas confondre ces deux sommes et ne jamais
que le
(voir
la
question
51.
),
et
de
même
pour
les
transferts
thermiques.
travail reçu par un système est la somme des travaux reçus par ses constituants
(voir la question 51.), et de même pour les transferts thermiques.
Il ne faut pas chercher à faire apparaître l’énergie mécanique dans l’expression
l’énergie
d’unà système
; en effet
les termes
d’énergie
de
de
Il ne
faut pastotale
chercher
faire apparaître
l’énergie
mécanique
danspotentielle
l’expression
l’énergie
mécanique
peuvent
correspondre
termesd’énergie
différentspotentielle
de l’énergie
de l’énergie
totale d’un
système
; en effet àlesdestermes
de
totale
: énergie
potentielle
extérieure
et énergie
interne.
l’énergie
mécanique
peuvent
correspondre
à des
termes différents de l’énergie
totale : énergie potentielle extérieure et énergie interne.
Les capacités thermiques peuvent être totales C , molaires Cm ou massiques c .
Pour
Les capacités
peuvent
être totalesnumériques,
C , molairesil Cconvient
c.
ne pas sethermiques
tromper dans
les applications
d’observer
m ou massiques
l’unité
des
grandeurs
proposées
et
surtout
de
faire
apparaître
systématiquement
Pour ne pas se tromper dans les applications numériques, il convient d’observer
dans
notation
le caractère
d’une
capacité
thermique.
Il faut donc
l’unitélades
grandeurs
proposéesextensif
et surtout
de faire
apparaître
systématiquement
éviter
notation C
utiliser mc
ou nC
relation thermique.
de Mayer sous
la forme
dans lala notation
le et
caractère
extensif
d’une
Il faut
donc
m . Lacapacité
C
et
utiliser
mc
ou
nC
.
La
relation
de
Mayer
sous
la
forme
éviter
la
notation
mcP − mcV = nR est ainsi sans aucune ambiguïté
sur les grandeurs utilisées.
m
mcP − mcV = nR est ainsi sans aucune ambiguïté sur les grandeurs utilisées.
Pour un système de type fluide, l’énergie interne U est plutôt indiquée pour
isochores
ΔU = QV ),interne
l’emploi
de plutôt
l’enthalpie
H pour
est
des
Pour transformations
un système de type
fluide,(l’énergie
U est
indiquée
U = QV ),( Δl’emploi
des
transformations
isochores ( Δisobares
conseillé
pour des transformations
H = QP ). de l’enthalpie H est
e Na
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
Micro
conseillé pour des transformations isobares ( ΔH = QP ).
En thermodynamique, les transferts d’énergie sont algébriques et les
de signe sontlesles transferts
suivantes :d’énergie
un travail sont
ou un algébriques
transfert thermique
conventions
En thermodynamique,
et les
effectivement
reçus
par
le
système
étudié
sont
comptés
positivement,
et
conventions de signe sont les suivantes : un travail ou un transfert
thermique
négativement
s’ils
sont
effectivement
fournis
;
ce
sont
donc
des
grandeurs
effectivement reçus par le système étudié sont comptés positivement, et
algébriques
reçues
le système.
négativement
s’ils par
sont
effectivement fournis ; ce sont donc des grandeurs
algébriques reçues par le système.
Il résulte du point précédent qu’il faut toujours vérifier l’adéquation du signe
travail
d’un
transfertqu’il
thermique
calculé vérifier
avec celui
donné pardulesigne
sens
d’un
Il résulte
du ou
point
précédent
faut toujours
l’adéquation
physique.
d’un travail ou d’un transfert thermique calculé avec celui donné par le sens
physique.
À l’intérieur d’un calorimètre, où l’on opère à pression constante, la
/ ou lacalorimètre,
compositionoùfinale
sont constante,
données par
température
À l’intérieuret d’un
l’on d’un
opèreéquilibre
à pression
la
ΔH = 0 lorsqu’on
les pertes
avec l’extérieur.
température
et / oupeut
la négliger
composition
finalethermiques
d’un équilibre
sont données par
ΔH = 0 lorsqu’on peut négliger les pertes thermiques avec l’extérieur.
Une erreur de débutant(e) consiste à dire : « Puisque la transformation est
la température
constante
! »:; «c’est
l’illustration
parfaite deest
la
adiabatique,
Une erreur de
débutant(e) est
consiste
à dire
Puisque
la transformation
adiabatique, la température est constante ! » ; c’est l’illustration parfaite de la
confusion
confusion entre
entre les
les notions
notions de
de «« température
température »» et
et de
de «« transfert
transfert thermique
thermique »»
64.
et
les
transformations
adiabatiques
du
chapitre
(voir
la
question
(voir la question 64. et les transformations adiabatiques du chapitre 10
10).
).
91:1
6907
3955
8
Il
Il est
est toujours
toujours utile
utile de
de faire
faire une
une représentation
représentation graphique
graphique des
des transformations
transformations
successives d’un
d’un fluide,
fluide, par
par exemple
exemple dans
dans un
un diagramme
diagramme de
de Clapeyron,
Clapeyron, ce
ce qui
qui
successives
est possible
possible pour
pour des
des transformations
transformations quasi
quasi statiques.
statiques. Elle
Elle permet
permet d’éviter
d’éviter des
des
est
erreurs avec
avec les
les valeurs
valeurs relatives
relatives des
des variables
variables d’état
d’état ou
ou de
de mieux
mieux comprendre
comprendre
erreurs
les
conséquences
par
exemple
des
valeurs
relatives
des
pentes
aux points
points
les conséquences par exemple des valeurs relatives des pentes aux
a
priori
la
courbe
n’est
valable
que
pour
un
seul
d’intersection.
Attention
d’intersection. Attention a priori la courbe n’est valable que pour un seul sens
sens
de
de parcours,
parcours, sauf
sauf bien
bien sûr
sûr si
si la
la transformation
transformation est
est réversible.
réversible.
.71.1
33.1
Il
Il est
est toujours
toujours utile
utile de
de représenter
représenter une
une transformation
transformation avec
avec changement
changement d’état
d’état àà
l’équilibre dans
dans le
le diagramme
diagramme de
de Clapeyron
Clapeyron (( P
l’équilibre
P,, V
V )) ou
ou ( P
P,, vv ) ..
iques
:211
0428
318:
8891
2320
:105
Les
Les changements
changements d’état
d’état que
que l’on
l’on observe
observe dans
dans la
la vie
vie courante
courante ne
ne
peuvent
pas
être
interprétés
directement
avec
les
diagrammes
peuvent pas être interprétés directement avec les diagrammes
d’équilibre. Notamment
Notamment le
le liquide
liquide en
en équilibre
équilibre des
d’équilibre.
des diagrammes
diagrammes
d’équilibre
correspond
à
la
situation
très
particulière,
schématisée cicid’équilibre correspond à la situation très particulière, schématisée
liquide
liquide
contre
:
liquide
enfermé
dans
une
enceinte
avec
paroi
mobile,
sans
contre : liquide enfermé dans une enceinte avec paroi mobile, sans
aucun
espace
libre.
aucun espace libre.
Un liquide
liquide au-dessus
au-dessus duquel
duquel existe
existe un
un espace
espace libre
libre ne
ne peut
peut pas
pas être
être àà
Un
l’équilibre ::
l’équilibre
Ź
Ź en
en espace
espace clos,
clos, il
il se
se vaporise
vaporise jusqu’à
jusqu’à ce
ce que
que la
la pression
pression de
de vapeur
vapeur saturante,
saturante,
àà la
température
finale,
soit
atteinte
et
l’état
final
est
un
équilibre
la température finale, soit atteinte et l’état final est un équilibre liquideliquidevapeur.
vapeur. Ou
Ou alors
alors il
il se
se vaporise
vaporise totalement
totalement si
si P
PVV ((T
T )) ne
ne peut
peut être
être atteinte.
atteinte.
Ź
Ź àà l’air
l’air libre,
libre, il
il se
se vaporise
vaporise totalement,
totalement, la
la vapeur
vapeur d’eau
d’eau se
se disperse,
disperse, P
PVV ((T
T )) ne
ne
peut
être
atteinte.
peut être atteinte.
ue e
t des
Micro
techn
Dans
Dans le
le cas
cas de
de la
la vaporisation
vaporisation d’un
d’un liquide,
liquide, la
la quantité
quantité de
de corps
corps pur
pur vaporisé
vaporisé
est
celle
nécessaire
pour
atteindre
la
pression
de
vapeur
saturante
(pression
est celle nécessaire pour atteindre la pression de vapeur saturante (pression
partielle du
du corps
corps pur
pur gazeux),
gazeux), elle
elle est
est indépendante
indépendante de
de la
la présence
présence d’autres
d’autres gaz
gaz
partielle
et
donc
de
la
pression
totale.
La
seule
influence
de
la
présence
d’autres
gaz
est
et donc de la pression totale. La seule influence de la présence d’autres gaz est
une
vaporisation
plus
lente.
une vaporisation plus lente.
V
ure d
corps pur
e Mé
caniq
À
À une
une température
température donnée,
donnée, une
une vapeur
vapeur est
est sèche
sèche si
si sa
sa pression
pression est
est inférieure
inférieure àà
la pression
pression de
de vapeur
vapeur saturante
saturante àà cette
cette température
température ;; réciproquement
réciproquement la
la pression
pression
la
d’un corps
corps pur
pur gazeux
gazeux ne
ne peut
peut pas
pas être
être supérieure
supérieure àà la
la pression
pression de
de vapeur
vapeur
d’un
saturante àà la
la température
température considérée.
considérée. Si
Si la
la quantité
quantité de
de corps
corps pur
pur présent
présent
saturante
entraîne une
une pression
pression du
du gaz
gaz correspondant
correspondant supérieure
supérieure àà P
entraîne
PVV ((T
T )) ,, alors
alors du
du gaz
gaz se
se
liquéfie
jusqu’à
ce
que
P
=
P
(
T
)
et
la
vapeur
est
saturante.
liquéfie jusqu’à ce que Pcorps pur = PV (T ) et la vapeur est saturante.
e Na
Écol
tiona
le Su
périe
En
En cas
cas de
de changement
changement d’état,
d’état, si
si la
la composition
composition finale
finale n’est
n’est aa priori
priori pas
pas
évidente,
il
faut
alors
faire
des
hypothèses
sur
cet
état
final
qu’il
convient
de
évidente, il faut alors faire des hypothèses sur cet état final qu’il convient de
vérifier,
a
posteriori,
par
les
valeurs
numériques
pertinentes
des
résultats,
par
vérifier, a posteriori, par les valeurs numériques pertinentes des résultats, par
exemple en
en comparant
comparant la
la pression
pression obtenue
obtenue et
et la
la pression
pression de
de vapeur
vapeur saturante.
saturante.
exemple
&KDSLWUH
&KDSLWUH
6907
3955
8
Ne pas confondre vaporisation et ébullition (voir la question 42.).
Ne
pas confondre
vaporisation
et ébullition
(voir la question
42.les
). diagrammes
L’ébullition
se produit
hors équilibre,
les déplacements
dans
L’ébullition
se
produit
hors
équilibre,
les
déplacements
dans
les
d’équilibre ne correspondent donc jamais à une ébullition. Ainsi lediagrammes
nom de la
d’équilibre
ne de
correspondent
jamaiscourbe
à une ébullition.
Ainsi
le nom
de la
partie gauche
la courbe de donc
saturation,
« d’ébullition
», fait
référence
partie
gauche
de
la
courbe
de
saturation,
courbe
«
d’ébullition
»,
fait
référence
de façon imagée à l’apparition d’une bulle de gaz lors d’une traversée à
de
façon imagée
l’apparition
d’une
bulle de
gazla lors
d’une
à
l’équilibre,
mais n’aà rien
à voir avec
l’ébullition
(voir
question
25.traversée
).
l’équilibre, mais n’a rien à voir avec l’ébullition (voir la question 25.).
.71.1
33.1
91:1
L’unité des enthalpies massiques de changement d’état est le J.kg −−11 , mais dans
L’unité des enthalpies
massiques de changement d’état est le J.kg , mais dans
la pratique, le kJ.kg −−11 ou J.g −−11 sont souvent utilisés, il faut être attentif pour les
la pratique, le kJ.kg ou J.g sont souvent utilisés, il faut être attentif pour les
applications numériques : 1kJ.kg −−11 = 1J.g −−11 = 1033 J.kg −−11 .
applications numériques : 1kJ.kg = 1J.g = 10 J.kg .
:105
$SSOLFDWLRQVGLUHFWHVGXFRXUV
$SSOLFDWLRQVGLUHFWHVGXFRXUV
8891
2320
3URSULpWpVGHVJD]
3URSULpWpVGHVJD]
techn
iques
:211
0428
318:
43. Rappeler l’équation du gaz parfait et définir les grandeurs qui y interviennent en
43. donnant
Rappelerleur
l’équation
du gaz
parfaitdeetgaz
définir
les en
grandeurs
qui y interviennent
en
unité. Quelle
quantité
parfait,
moles, occupe,
à la température
donnant
leur
unité.
Quelle
quantité
de
gaz
parfait,
en
moles,
occupe,
à
la
température
de 20 °C et sous la pression de 1, 0 bar , un volume de 20 L ? Quel est le volume
de
20 °Cdans
et sous
la pression
de 1, 0 bar
molaire
les conditions
normales
? , un volume de 20 L ? Quel est le volume
molaire dans les conditions normales ?
44. Quelle est la masse molaire de l’air sachant qu’il est composé approximativement à
44. Quelle
la masse
l’air sachant
qu’il sous
est composé
approximativement
80 % deestdiazote
et molaire
20 % dededioxygène
? L’air
une pression
de 1,0 bar et àà
80
%
de
diazote
et
20
%
de
dioxygène
?
L’air
sous
une
pression
1,0 bardeet saà
température usuelle de 20 °C est assimilé à un gaz parfait ; estimer de
la valeur
température
usuelle
de
20
°C
est
assimilé
à
un
gaz
parfait
;
estimer
la
valeur
de sa
masse volumique ρ .
masse volumique ρ .
Micro
45. (PTSI) Calculer la vitesse quadratique moyenne des molécules O2 et He à 20°C
45. dans
(PTSIun
) Calculer
la ;vitesse
quadratique
O−21 et He à 20°C
M O2 = 32moyenne
g.mol −−11 etdes
M molécules
modèle GP
on donne
He = 4 g.mol −1 .
dans un modèle GP ; on donne M O2 = 32 g.mol et M He = 4 g.mol .
e Mé
caniq
ue e
t des
46. Une lampe spectrale, de volume intérieur 3,0 cm 33 , contient de l’hélium, sous une
46. Une lampe spectrale,
de volume intérieur 3,0 cm , contient de l’hélium, sous une
pression de 1,0.10 −−22 bar et à la température de 300 K . Calculer l’énergie interne et
pression
bar et àsont
la température
dede300
K . Calculer
l’énergie interne
la masse de
de 1,0.10
ce gaz. Quelles
les variations
température
et d’énergie
interne et
si
−1 si
la
masse
de
ce
gaz.
Quelles
sont
les
variations
de
température
et
d’énergie
interne
et
la pression augmente de 5 % ? On donne la masse molaire de l’hélium : 4 g.mol
la pression augmente de 5 % ? On donne la −masse
molaire de l’hélium : 4 g.mol −1 et
la constante des gaz parfaits : R = 8,31 J.K −11.mol −−11 .
la constante des gaz parfaits : R = 8,31 J.K .mol .
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
le Su
périe
ure d
47. Quelle différence existe-t-il entre la capacité thermique massique exprimée en
−1
−1
47. Quelle
différence
J.°C −−11.kg
et celle existe-t-il
en J.K −−11.kgentre
? la capacité thermique massique exprimée en
−1
−1
J.°C .kg et celle en J.K .kg ?
48. Un gaz parfait idéal ( γ = cste ), n moles, subit deux
transformations différentes d’un même état initial A( P0 , V0 )
vers un même état final B (2 P0 , 2V0 ) .
P
22P
P0
– la transformation AC1 B constituée d’une isobare AC1 et
P0
d’une isochore C1B .
C2
B
6907
3955
8
$SSOLFDWLRQVGXSUHPLHUSULQFLSH
C1
A
91:1
– la transformation AC2 B constituée d’une isochore AC2
.71.1
33.1
V0
2V0 V
O
et d’une isobare C2 B .
Toutes les transformations sont mécaniquement réversibles.
a) Calculer pour chaque transformation le travail et le transfert thermique reçus par
le gaz de la part du milieu extérieur en fonction P0 , V0 et γ = cP / cV ;
:105
conclusion ? Calculer ΔU AB de deux façons différentes.
8891
2320
b) Considérer le cycle AC 2 BC1 A , calculer de deux façons différentes le travail total
reçu au cours de ce cycle, en déduire le transfert thermique reçu.
iques
:211
0428
318:
49. Un cylindre indéformable (volume intérieur constant) à parois athermanes
(isolantes) est séparé en deux compartiments par un piston mobile diatherme (qui
laisse passer les transferts thermiques). Dans chaque compartiment se trouvent n
moles d’un gaz parfait idéal ( γ = 1, 4 ). L’état initial du premier gaz est : pression P0
et température T01 , celui du second : pression P0 et température T02 ≠ T01 . Le
système évolue vers un état d’équilibre final, exprimer pression et température de
chaque gaz dans l’état final. La transformation est-elle réversible ?
ue e
t des
Micro
techn
50. Une mole de dioxygène se détend d’un volume V1 = 10 L , température T1 = 298 K
à un volume V 2 = 50 L , température T2 = 373 K . Utiliser un modèle gaz parfait
idéal, avec γ = 1, 4 . Représenter la transformation, supposée mécaniquement
réversible, dans le diagramme de Clapeyron et calculer travail et transfert thermique
reçus par le gaz si la détente s’effectue :
a) par un échauffement isochore suivi d’une détente isotherme ;
b) par une détente isotherme suivie d’un échauffement isochore.
Donner un commentaire pertinent des résultats.
e Mé
caniq
51. Une enceinte indéformable, dont les parois sont athermanes, est séparée en deux
compartiments par une cloison également athermane. Initialement le compartiment
A contient du dioxygène ( γ 1 = 7 / 5 ) dans l’état : P1 = 3,0 bar , V1 = 1,0 L et
T1 = 293 K ; le compartiment B contient du néon ( γ 2 = 5 / 3 ) dans l’état :
e Na
Écol
tiona
le Su
périe
ure d
P2 = 2,0 bar , V 2 = 2,0 L et T2 = 323 K . Les deux gaz sont assimilés à des gaz
parfaits idéaux et leur mélange, après suppression de la cloison, à un gaz parfait.
a) Trouver un (ou des) qualificatif(s) pour la transformation subie par l’ensemble
des deux gaz.
&KDSLWUH
b) Calculer la pression P0 , le volume V0 et la température T0 du mélange à
l’équilibre.
c) Comment peut-on qualifier la transformation subie par chaque gaz ?
6907
3955
8
52. Transformations isochore et isobare
On considère n moles de gaz parfait idéal enfermé dans un cylindre muni d’un
piston et subissant une transformation monotherme, c’est-à-dire que les échanges
thermiques ne peuvent se faire qu’avec un seul thermostat (ou source).
a) La transformation est isochore et fait passer la température initiale Ti à la valeur
91:1
T f > Ti . Décrire le système (paroi du récipient, extérieur...) et le mode opératoire
:105
.71.1
33.1
de la transformation, et évaluer le travail des forces de pression W et le transfert
thermique Q reçu par le gaz.
b) La transformation est isobare et on fait passer de manière mécaniquement
réversible le gaz de son volume initial Vi (température Ti ) à un volume final
V f < Vi . Décrire le système (paroi du récipient, extérieur...) et le mode opératoire
8891
2320
de la transformation, et évaluer le travail des forces de pression W et le transfert
thermique Q reçu par le gaz.
318:
53. Une quantité de gaz parfait passe de l’état P1 = 1, 0 bar , T1 = 300 K , V1 = 50 L à
l’état P2 = 2, 0 bar , T2 = 600 K , V2 = 50 L . Que peut-on dire du transfert thermique
:211
0428
Q reçu par le gaz dans cette transformation ( CVm = 20 J.K −1.mol−1 ) ?
ue e
t des
Micro
techn
iques
54. Détermination de la capacité thermique massique de l’aluminium
a) En négligeant les pertes entre un calorimètre et l’extérieur pendant l’opération,
montrer que les conditions opératoires conduisent à la conservation de l’enthalpie
du système.
b) Un calorimètre contient une masse m0 = 200 g d’eau à la température
t0 = 20, 0 °C . On introduit ensuite dans ce calorimètre une masse m1 = 300 g
d’eau à la température t1 = 40, 0 °C . À l’équilibre thermique la température a
pour valeur t f = 31, 5 °C . Déterminer la capacité thermique C du calorimètre, et
caniq
en déduire sa valeur en eau μ (pour l’eau c = 4,18 kJ.kg −1.K −1 ).
c) À partir de l’équilibre précédent, on introduit ensuite dans le calorimètre une
pièce en aluminium de masse m2 = 50, 0 g et de température t2 = 90, 0 °C . La
température atteinte à l’équilibre thermique a pour valeur t ′f = 32, 7 °C .
e Mé
Déterminer la capacité thermique massique cAl de l’aluminium.
ure d
7UDQVLWLRQVGHSKDVH
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
le Su
périe
55. Quelle est l’allure de la courbe d’évolution de la température en fonction du temps
lors du chauffage isobare, sous une pression de 1, 0 atm , d’une masse m de glace
(d’eau) enfermée dans une enceinte fermée dont la paroi supérieure est un piston sur
lequel s’exerce la pression 1, 0 atm ? On considère que l’évolution est une
6907
3955
8
succession d’états d’équilibre. Relier la puissance thermique de chauffe Pth
(transfert thermique fourni au corps pur par unité de temps), supposée constante, à la
pente des portions de diagramme tracées et aux durées des phases de changement
d’état.
91:1
56. Calculer numériquement la variation d’énergie interne (massique) Δu dans le
changement d’état réversible glace / eau liquide sous une pression constante de
1, 0 atm ; conclusion. Masse volumique de la glace : ρ g = 0,92 103 kg.m −3 .
.71.1
33.1
57. Par suite des frottements dus à l’air, les grêlons acquièrent très rapidement dans leur
chute une vitesse constante. En supposant que la température d’un grêlon est de
0 °C , déterminer la hauteur minimale de chute h , dans l’air à 0 °C , pour
provoquer sa fusion totale.
:105
58. Mélange de phases à températures différentes
318:
8891
2320
a) Dans un récipient calorifugé, de très faible capacité thermique, on met en contact
mg = 25 g de glace à t g = 0 °C et mv = 10 g de vapeur d’eau à tv = 100 °C ;
quelle est la composition et la température à l’équilibre ?
Données : Les enthalpies de changement d’état sont, pour la fusion
l f = 334 J.g −1 , et pour la vaporisation lv = 2260 J.g −1 ; la capacité
0428
thermique de l’eau est ce = 4, 2 J.g −1 .K −1 .
b) Dans un récipient, de très faible capacité thermique, on introduit mg = 60 g de
:211
glace prise à la température t g = − 23 °C du congélateur et me = 30 g d’eau prise
iques
à la température te = 15 °C du robinet. Déterminer l’état final du système.
Données : La capacité thermique de la glace : cg = 2,1 kJ.kg −1.K −1 ; l’enthalpie
techn
massique de fusion de la glace : l f = 334 kJ.kg −1 ; la capacité
Micro
thermique de l’eau liquide : ce = 4, 2 kJ.kg −1.K −1 .
ue e
t des
59. Un corps pur en équilibre sous deux phases 1 et 2, à la température T , est soumis à
une pression Péq qui dépend de T (et de la nature du corps pur). La pente dPéq / dT
des courbes d’équilibre (tracées à la question 27.) est liée à la température T , à
l’enthalpie massique de changement d’état 1 → 2 notée l12 et à la différence des
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
volumes massiques des deux phases du corps pur Δv = v2 − v1 (le volume massique
est l’inverse de la masse volumique).
dPéq
β
Cette relation s’écrit :
= T α l12
Δvγ
dT
* Par l’analyse dimensionnelle, déterminer les exposants α , β et γ , et réécrire la
formule ainsi obtenue.
* Dans le diagramme P (T ) de changement d’état de l’eau, la pente de la courbe
d’équilibre solide / liquide est négative, alors que les deux autres sont positives ;
interpréter. Quel fait d’expérience bien connu cela traduit-il ?
&KDSLWUH
60. La compression isotherme d’une vapeur peut-elle conduire directement au solide ?
Et son refroidissement isobare ?
7 (K )
caniq
ue e
t des
Micro
techn
iques
:211
0428
318:
8891
2320
:105
.71.1
33.1
91:1
6907
3955
8
61. On donne ci-dessous la courbe d’équilibre solide-gaz pour CO2 : en abscisse la
température T en K et en ordonnée la pression en bar, mais attention en échelle
logarithmique.
Placer les domaines correspondant à la glace carbonique et au dioxyde de carbone
gazeux. Quelle est la température et la pression au point triple ?
L’atmosphère de la planète Mars est constituée essentiellement de gaz carbonique.
La température moyenne est T ≈ − 40 °C , et la pression atmosphérique moyenne
P ≈ 5, 4 hPa . La température minimale observée est de Tmin = −133 °C (la nuit, car
il y a environ 100 °C d’écart entre le jour et la nuit, et au pôle en hiver, car il y a
environ 60 °C d’écart entre l’équateur et le pôle en hiver, presque comme sur
Terre).
Pourquoi le CO 2 liquide n’existe-t-il pas sur Mars ?
La glace carbonique peut-elle exister en surface ? Où et quand ?
Pourquoi la température ne peut-elle pas descendre en dessous de la limite
observée ?
point triple •
3 ( E DU )
e Mé
4XHVWLRQVGHUpIOH[LRQ3K\VLTXHSUDWLTXH
ure d
62. (PTSI) Pourquoi la Lune n’a-t-elle plus d’atmosphère ?
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
le Su
périe
63. Une personne marche pieds nus dans une maison et passe successivement d’une
pièce dont le sol est recouvert de moquette à une autre dont le sol est un parquet, et
enfin une troisième dont le sol est en carrelage. La sensation de plus chaud ou plus
froid, laisse penser que les températures des sols sont différentes et pourtant, à
l’évidence, l’équilibre thermique est réalisé, dans la maison, et tous les trois sont à la
même température. Interpréter.
6907
3955
8
64. Commenter l’affirmation suivante : « Lorsqu’on fournit de la chaleur à un système,
sa température augmente ». Citer des exemples et contre-exemples.
33.1
91:1
65. La pression atmosphérique est de 1 bar et dans l’eau, à une profondeur de 10 m , la
pression vaut 2 bar . Un plongeur, de capacité pulmonaire (volume maximal d’air
dans les poumons) de 7 L , plonge (en apnée) en bloquant sa respiration, à une
profondeur de 10 m après avoir gonflé ses poumons. Proposer un modèle simple
pour déterminer le volume d’air dans les poumons à cette profondeur.
:105
.71.1
66. Un système de nature inconnue communique avec le milieu extérieur par un arbre
mécanique tournant à la vitesse angulaire ω (t ) . On note W le travail reçu, pendant
une durée quelconque, par ce système.
8891
318:
iques
:211
0428
b) Si W < 0 , le système fournit du travail, c’est un moteur,
il fait tourner l’arbre et un opérateur extérieur agissant
sur cet arbre reçoit du travail. Le premier principe
indique que l’énergie du système diminue. Mais sous
quelle forme ? Envisager diverses possibilités.
2320
a) Si W > 0 , le système reçoit effectivement du travail, par
exemple un opérateur extérieur fait tourner l’arbre. Le
premier principe indique que l’énergie du système
augmente. Mais sous quelle forme ? Envisager diverses
possibilités.
ue e
t des
Micro
techn
67. Quelle durée minimale faut-il à une bouilloire électrique pour porter à ébullition,
sous Patm = 1, 0 atm , 1, 0 L d’eau initialement à 20 °C sachant que la puissance de
sa résistance chauffante est de 2, 0 kW ? Quelle augmentation de température
obtiendrait-on si la même quantité d’énergie servait à échauffer la même masse de
fer, sachant que la capacité thermique massique du fer est c = 0, 45 kJ.kg −1.°C−1 ?
caniq
68. La calorie est une (ancienne) unité d’énergie, encore utilisée dans le domaine agroalimentaire. Quelle est sa définition et son rapport de conversion avec le joule ?
ure d
e Mé
69. En découpant un morceau de fer avec une scie circulaire à grande vitesse, une gerbe
d’étincelles très chaudes ( > 1 500 °C ) jaillit. Expliquer. Et pourtant, en manipulant
la scie sans gants, les mains qui reçoivent ces microparticules incandescentes ne
perçoivent aucune sensation de chaleur. Pourquoi ?
e Na
Écol
tiona
le Su
périe
70. Comment la bouteille « thermos » est-elle conçue pour réduire au mieux les trois
modes de pertes thermiques.
&KDSLWUH
71. Comment procède-t-on pour évacuer « la chaleur » dégagée par un appareil
électrique en marche ? Prendre comme exemples les appareils de TP ou l’unité
centrale d’un ordinateur.
6907
3955
8
72. Quel est le principe du double vitrage ?
73. (PTSI) Pourquoi serait-il difficile de maintenir la flamme d’une allumette dans un
satellite en orbite autour de la Terre ?
33.1
91:1
74. Lorsqu’on réchauffe un plat cuisiné au four à micro-ondes, il faut percer de trous le
sachet en plastique qui le contient sinon, assez rapidement ce dernier se met à
gonfler, pourquoi ?
:105
.71.1
75. L’été quand il fait chaud, on utilise des brumisateurs (qui dispersent de fines
gouttelettes d’eau) pour rafraîchir l’air ; expliquer comment.
8891
2320
76. Pourquoi couvre-t-on une piscine la nuit ? Quels sont les avantages d’une culture
sous serre ? Pourquoi faut-il placer un couvercle sur une casserole contenant de
l’eau que l’on veut échauffer ?
318:
77. Comment expliquer que l’on refroidisse la soupe en soufflant dessus ?
0428
78. Dans les cafés, on échauffe le lait avec de la vapeur d’eau ; pourquoi ce procédé estil plus efficace que le chauffage direct sur une plaque de cuisson ?
iques
:211
79. Lors d’hivers froids, les paysans plaçaient des cuvettes d’eau dans leur cave pour
éviter que les pommes de terre n’y gèlent. Expliquer.
techn
80. On entend parfois parler de « taux d’humidité de l’air », par exemple de 60%, il
s’agit du degré hygrométrique ou humidité relative. Quelle peut être sa définition ?
ue e
t des
Micro
81. Lorsque l’on porte de l’eau à ébullition, chauffage à l’air libre, on peut observer bien
avant d’atteindre la température d’ébullition la formation au fond du récipient de
bulles gazeuses qui remonte à la surface. Comment l’interpréter ?
82. Pourquoi en hiver les vitres de la salle de classe se recouvrent-elles de buée ?
caniq
83. Pourquoi l’air humide s’élevant de la surface des mers chaudes forme-t-il de gros
nuages appelés cumulus en arrivant à une altitude de l’ordre de 1 000 m ?
ure d
e Mé
84. Comment expliquer qu’en entretenant, avec une pompe à vide, une pression
suffisamment basse dans un ballon contenant de l’eau, on puisse faire bouillir cette
eau et la transformer en glace ?
périe
85. Pourquoi souffre-t-on davantage de la « chaleur » si l’air est humide ?
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
le Su
86. Pourquoi un peu d’éther versé au creux de la main procure-t-il une sensation de
froid ?
87. Pourquoi le temps de cuisson est-il réduit dans un autocuiseur (ou cocotte minute)
sachant que la pression y atteint 2 bar ?
6907
3955
8
88. Citer un exemple de condensation, de sublimation.
33.1
91:1
89. Stockage des fluides
Pour le stockage des fluides en bouteille d’acier, il faut distinguer deux cas : les
fluides dont la température critique est inférieure à la température ambiante et ceux
dont la température critique est supérieure à cette température ambiante. Rappeler
les possibilités de stockage offertes dans chaque cas et les précautions à prendre.
:105
.71.1
([HUFLFHV
318:
8891
2320
90. Refroidissement de l’air d’un pot de confiture
La fabrication d’une confiture se fait à partir d’un mélange de fruits et de sucre,
échauffé à t0 = 120 °C sous la pression atmosphérique P0 = 1,00.105 Pa . Le pot est
rempli jusqu’à 1, 0 cm du bord puis fermé, à cette température et sous cette pression.
La pression de l’air emprisonné dans le pot au moment de la fermeture est donc P0
et sa température T0 .
0428
a) Quelle est la pression P1 de l’air enfermé sous le couvercle lorsque le pot a atteint
ue e
t des
Données : g = 9,8 m.s −2 , R = 8,31 J.K −1.mol −1 .
Micro
techn
iques
:211
la température ambiante de la cuisine t1 = 20 °C , en considérant le couvercle
étanche ?
b) Le diamètre du couvercle du pot de confiture est D = 8, 0 cm . Exprimer, à la
température de 20 °C, les forces exercées sur le couvercle par l’air extérieur et
par l’air restant dans le pot. En déduire la force de pression résultante sur le
couvercle, préciser ses caractéristiques (sens et norme).
c) Si le couvercle était simplement posé sur le pot, quelle masse faudrait-il placer
sur le couvercle pour obtenir la même force pressante ?
91. Échauffement puis refroidissement d’un gaz
De l’air ambiant à température initiale Ti = 20 °C
et sous une pression
périe
ure d
e Mé
caniq
Pi = 1, 0 bar , est enfermé dans un récipient dont les parois laissent bien passer la
chaleur et qui est fermé par un piston de masse négligeable. Les transferts
thermiques étant lents, on considère une évolution quasi statique.
a) Quel est le nombre de moles d’air dans le récipient sachant que son volume initial
est Vi = 50 L ?
b) Le récipient est trempé (à l’exception du piston) dans un bain-marie dont la
température est Tbm = 60 °C ; pendant l’opération le piston est libre de se
le Su
mouvoir. Déterminer et calculer la température finale T f , la pression finale Pf et
e Na
Écol
tiona
le volume final V f de l’air enfermé au bout d’un temps assez long.
&KDSLWUH
c) À la fin de la situation précédente, le piston est bloqué, puis le récipient est retiré
du bain-marie et replacé dans l’air ambiant. Quels sont à nouveau le volume final
V f ′ , la température finale T f ′ et la pression finale Pf ′ (à exprimer en fonction de
6907
3955
8
Pi ) de l’air enfermé au bout d’un temps assez long ?
0428
318:
8891
2320
:105
.71.1
33.1
91:1
92. Étude d’une pompe « à vide »
On considère la pompe représentée sur la figure ci-dessous, et destinée à vider l’air
contenu dans le compartiment B de volume V constant égal à 1, 0.103 L .
Le corps de la pompe A a un
volume maximal V0 de 10 L . Le
p0
piston P est mobile sans frottement
et sa masse est négligeable. Lors de
a
B
chaque coup de pompe le piston
P
A
b
effectue un aller-retour complet : à
l’aller, le volume du compartiment A passe de V0 à 0 , puis au retour, de 0 à V0 .
La soupape (a) ne laisse passer l’air que du compartiment A vers l’extérieur, et la
soupape (b) ne laisse passer l’air que du compartiment B vers le compartiment A .
L’air est considéré comme un gaz parfait et l’opération de vidage est, dans les
conditions de l’expérience, isotherme, quasi statique et mécaniquement réversible.
Au début de l’opération, la température de l’air et sa pression sont égales à
T0 = 298 K et p0 = 1, 0.105 Pa dans tous les compartiments et à l’extérieur du
ue e
t des
Micro
techn
iques
:211
dispositif. La constante des gaz parfaits vaut R = 8,31 J.mol −1.K −1 .
a) Calculer numériquement la pression p1 dans le compartiment B après le premier
aller retour du piston.
b) Donner la valeur du travail reçu par le gaz enfermé initialement dans le
compartiment B à l’issue du premier retour du piston. Peut-on en déduire le
travail du moteur qui actionne le piston pendant ce premier retour.
c) Établir la relation entre pk , p0 , V , V0 et k , où pk est la pression du gaz restant
dans le compartiment B après k coups de pompe.
AN : Déterminer la valeur numérique de k pour que pk = p0 /100 .
d) Quelle critique peut-on formuler quant à la modélisation précédente ?
caniq
93. Bilan de transferts thermiques lors d’une transformation
c
Un gaz parfait idéal, de rapport P = γ , subit le cycle de P
cV
kP0
transformations mécaniquement réversibles représenté cicontre.
Pour quelle valeur de k le transfert thermique reçu lors
de la transformation BC est-il nul ? Cette transformation P0
BC peut-elle être qualifiée d’adiabatique ?
ure d
e Mé
B
A
V0
C
2V 0
le Su
périe
V
94. Compression isotherme d’une vapeur d’eau
Un récipient de volume initial Vi = 3, 0 L contient seulement m = 1, 0 g d’eau à la
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
température t0 = 100 °C . On donne pour l’eau PV (100 °C) = 1, 0 bar ; l’enthalpie
6907
3955
8
massique de vaporisation, à 100 °C, lv = 2, 26.103 J.g −1 ; on considère la vapeur
d’eau sèche comme un gaz parfait.
Par déplacement réversible d’un piston, on réalise sur ce système une compression
isotherme réversible jusqu’au volume final V f = 1, 0 L .
a) Préciser la composition du système dans les états initial et final.
b) Calculer le travail W et le transfert thermique Q reçus par le système.
0428
318:
8891
2320
:105
.71.1
33.1
91:1
95. Échauffement isochore d’un équilibre liquide-vapeur (*)
La situation est celle de la fin de l’exercice précédent (qu’il n’est pas nécessaire
d’avoir cherché). Une enceinte de volume V = 1, 0 L contient en équilibre
mv = 0,58 g de vapeur d’eau et 0, 42 g d’eau liquide à la température t = 100 °C .
On échauffe réversiblement ce mélange à volume constant jusqu’à la température
t ′ = 110 °C pour laquelle la pression de vapeur saturante est PV′ = 1,3 bar ,
l’équilibre liquide-vapeur étant toujours réalisé.
d) Quelle est la nouvelle composition à l’équilibre ?
e) Quel transfert thermique QV a-t-il fallu fournir ?
Données : Les enthalpies massiques de vaporisation à t = 100 °C et t ′ = 110 °C sont
respectivement lv = 2260 J.g −1 et lv′ = 2230 J.g −1 ; la capacité thermique
de l’eau liquide autour de 100 °C est supposée constante :
c = 4, 2 J.g −1.°C−1 .
techn
iques
:211
96. Mesure de l’enthalpie de vaporisation de l’eau
On place sur le plateau d’une balance électronique un récipient calorifugé contenant
de l’eau maintenue en ébullition par une résistance électrique parcourue par un
courant d’intensité constante. La vapeur formée s’échappe par un orifice dans
l’atmosphère extérieure dont la pression est normale.
Après avoir taré la balance, on déclenche un chronomètre. Avec une intensité
I1 = 2,5 A et une tension aux bornes de la résistance U1 = 5,0 V , la masse a
Micro
diminué de m0 = 2, 0 g au bout d’une durée t1 = 400 s .
Avec une intensité I 2 = 3, 0 A correspondant à une tension U 2 = 6, 0 V , la même
ue e
t des
diminution de masse est obtenue au bout d’une durée t2 = 269 s .
e Mé
caniq
a) Expliquer le principe de cette expérience et mesurer en kJ.kg −1 l’enthalpie
massique de vaporisation lV de l’eau à 100 °C dans chacune des deux
expériences, les pertes thermiques étant négligées.
Comment s’écrit le premier principe dans ce cas ?
b) Ces valeurs ne sont pas satisfaisantes. Montrer qu’il est possible d’obtenir une
meilleure valeur de lV à partir des deux expériences précédentes en modélisant
périe
ure d
les pertes par une puissance thermique Pf constante.
le Su
97. Réalisation expérimentale d’une compression isotherme (*)
On envisage de comprimer de l’air d’un état initial, P1 = 1,0.10 5 Pa et température
e Na
Écol
tiona
T1 = 290 K , à un état final, P2 = 5,0.10 5 Pa et température T1 = 290 K .
&KDSLWUH
L’air à comprimer est considéré comme un gaz parfait idéal de rapport γ = 1, 4 . Les
6907
3955
8
transformations étudiées sont mécaniquement réversibles, et R = 8,3 J.K −1.mol −1 .
Les échanges thermiques éventuels se font uniquement avec l’air ambiant considéré
comme un thermostat de température T1 . On ne dispose donc que d’un seul
thermostat.
1. On envisage d’abord la compression d’une mole de gaz suivant un processus
isotherme réversible. Quel travail Wm faut-il fournir à une mole de gaz ?
91:1
2. La compression isotherme étant difficilement réalisable (durée trop grande), on
propose les transformations suivantes :
.71.1
33.1
Ɣ compression adiabatique réversible de l’état initial jusqu’à la pression P2 ;
Ɣ puis refroidissement isobare jusqu’à l’état final.
Calculer le travail W1 nécessaire pour comprimer une mole de gaz de cette façon
2320
:105
et le comparer à Wm . Quelle est la différence importante entre ce processus et
celui de la question 1 ?
3. On considère maintenant une compression en deux étapes :
:211
0428
318:
8891
Ɣ Compression adiabatique réversible de ( P1 , T1 ) jusqu’à une pression P
(telle que P1 < P < P2 ) puis refroidissement isobare jusqu’à la température
T1 .
Ɣ Compression adiabatique réversible de ( P , T1 ) jusqu’à la pression P2 , puis
refroidissement isobare jusqu’à la température T1 .
Micro
techn
iques
a) Représenter ces transformations sur un diagramme de Clapeyron.
b) Exprimer le travail W à fournir à une mole de gaz en fonction de
P, P1 , P2 , T1 , R et γ .
c) Comment choisir la pression P pour que W soit minimal ?
d) Exprimer la valeur minimale notée W2 de W en fonction de P1 , P2 , T1 , R et γ .
ue e
t des
e) Calculer numériquement W2 et comparer à W1 et Wm . Interpréter graphiquement.
4. On considère maintenant une transformation constituée de N étapes du type
compression adiabatique puis refroidissement isobare ; les pressions
intermédiaires sont notées p i , avec p 0 = P1 et p N = P2 .
périe
ure d
e Mé
caniq
a) Exprimer le travail W total à fournir à une mole en fonction des p i , N , T1 ,
R et γ .
∂W
= 0 soient suffisantes pour rendre W
b) En admettant que les conditions
∂p i
minimal, donner la relation entre p i , p i +1 et p i −1 pour que W soit minimal.
Montrer qu’alors des pressions intermédiaires telles que :
1
e Na
Écol
3URSULpWpVGHVV\VWqPHVWKHUPRG\QDPLTXHV
tiona
le Su
p i +1 § p N · N
=¨
¸
pi
© p0 ¹
rendent
rendentWWminimal
minimaletetdonner
donnercette
cettevaleur
valeurminimale
minimalenotée
notéeWWN N enenfonction
fonctiondede
P1P,1 ,P2P,2 ,NN, T
, 1T,1 ,RRetetγ γ. .
6907
3955
8
Calculerlalalimite
limitedede WWN N pour
pour NN→→∞∞, ,comparer
comparercette
cettelimite
limiteà à WW
c)c)Calculer
m m etet
interpréter.
interpréter.
4XHVWLRQVRXYHUWHV
4XHVWLRQVRXYHUWHV
.71.1
33.1
91:1
98.
98. Brisure
Brisurededesymétrie
symétrie(*()*)
Le
Le problème
problème est
est à à symétrie
symétrie cylindrique
cylindrique
d’axe
d’axeperpendiculaire
perpendiculaireà àcelui
celuidedelalafigure.
figure.
Deux
Deuxcompartiments
compartimentsnotés
notés nn etet oo, ,dede
d’épaisseurfaible
faibledevant
devant
rayon
rayonmoyen
moyenRRm md’épaisseur
αα
oo
:105
nn
RRm m etetdedesection
section AA, ,sont
sontremplis
remplischacun
chacun
mm
0428
318:
8891
2320
GG
moles dede gaz
gaz
dudu même
même nombre
nombre nn dede moles
gg
parfait,
parfait,etetséparés
séparésd’un
d’unpiston
pistondedemasse
massemm
OO
RRm m
qui
quicoulisse
coulissesans
sansfrottement.
frottement.L’ensemble
L’ensemble
AA
baigne
baignedans
dansununthermostat
thermostatqui
quimaintient
maintientlalatempérature
températureTT constante.
constante.
Déterminer
Déterminerununparamètre
paramètre pp sans
sansdimension
dimensionqui
quicaractérise
caractériselalastabilité
stabilitédedelala(des)
(des)
position(s)
position(s)d’équilibre
d’équilibreetetles
lesétudier.
étudier.
sectionAAsur
surununsecteur
secteur
Données
Données: :Le
Levolume
volumed’un
d’untore
toredederayon
rayonmoyen
moyenRRm metetdedesection
iques
:211
estααRRm mAA. .
d’arc
d’arcd’angle
d’angleααest
Micro
techn
99.
99. Le
Lecoût
coûtd’un
d’unbain
bain
Lorsque
LorsqueLara
Laraprend
prendununbain,
bain,elle
elleremplit
remplitlalabaignoire
baignoireavec
avecenviron
environ200
200LLd’eau
d’eauetet
souhaite
souhaiteune
unetempérature
températuredudubain
baindede 3737°C
°C. .Pour
Pouréviter
évitertoute
toutecontamination
contaminationpar
par
légionellose,
légionellose,elle
elles’assure
s’assureque
quelalatempérature
températurededeson
sonchauffe-eau
chauffe-eauélectrique
électriqueest
estbien
bien
maintenue
maintenueà à6868°C
°C; ;cecedernier
dernierest
estalimenté
alimentéà àpartir
partird’une
d’uneeau
eaufroide
froideà à1818°C
°C. .
Estimer
Estimerleleprix
prixdudubain
baindedeLara.
Lara.
e Na
Écol
tiona
le Su
périe
ure d
e Mé
caniq
ue e
t des
1 −1−1
Données
Données: :**capacité
capacitéthermique
thermiquemassique
massiquededel’eau
l’eau: :c c==4,4,22J.g
J.g−1−.K
.K . .
**température