Modeling & Control of Half EV with BLDC In-Wheel Motor & Pacejka Tire
Telechargé par
Ossama Ammari

IFAC PapersOnLine 55-12 (2022) 604–609
ScienceDirect
Available online at www.sciencedirect.com
2405-8963 Copyright © 2022 The Authors. This is an open access article under the CC BY-NC-ND license
.
Peer review under responsibility of International Federation of Automatic Control.
10.1016/j.ifacol.2022.07.378
10.1016/j.ifacol.2022.07.378 2405-8963
Copyright ©
2022 The Authors. This is an open access article under the CC BY-NC-ND license
(
https://creativecommons.org/licenses/by-nc-nd/4.0/
)
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
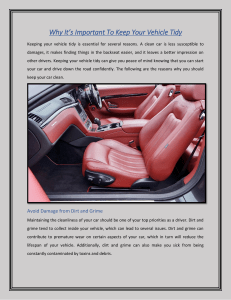
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:

Ossama Ammari et al. / IFAC PapersOnLine 55-12 (2022) 604–609 605
Copyright ©
2022 The Authors. This is an open access article under the CC BY-NC-ND license
(
https://creativecommons.org/licenses/by-nc-nd/4.0/
)
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
Modeling and control of a half electric vehicle including an inverter, an in-
wheel BLDC motor and Pacejka’s tire model
Ossama Ammari1, Khalid El Majdoub1, Fouad Giri2
1Dept. Electric Engineering University Hassan II Faculty of Science and Technology Mohammedia,
Morocco (ammari.ossama@gmail.com, khalid_majdoub@yahoo.fr).
2Normandie University, UNICAEN, 14000 Caen, France (fouad.giri@unicaen.fr)
Abstract: The problem of modeling the longitudinal motion of an Electric Vehicle (EV) or Hybrid
Electric Vehicle (HEV) propelled by In-Wheel motor is considered. A complete non-linear model of the
vehicle propelled by brushless DC (BLDC) in-wheel motor is presented. The model describes the
association of the inverter, BLDC in-wheel motor and the chassis of the vehicle. It describes the behavior
of the vehicle in the different driving phases, i.e. acceleration mode and deceleration mode. The relevant
fundamental laws are used to model the chassis dynamics taking into account the different non-linear
aspects such as aerodynamic effects, rolling resistance and road load. The Pacejka tire model is retained
to describe the various phenomena generated at the wheel-road contact. It is shown that the proposed
model describes correctly the longitudinal behavior of the vehicle in the acceleration and deceleration
modes in different driving conditions.
Keywords: Half vehicle model, longitudinal behavior, tire Pacejka’s model, BLDC in-wheel motor.
1. INTRODUCTION
The development of EVs is taking place on several levels,
e.g. intelligent drive systems design (Chang et al. 2020),
suspension control (El Majdoub et al., 2021), power
management optimization (Bai et al., 2020), longitudinal
motion control (El Majdoub et al., 2012; El Majdoub et al.,
2013), lateral motion control (Mata et al., 2019), yaw
moment control (Hu et al., 2017). In this article we are
interested in the modeling and control of the longitudinal
vehicle propelled by in-wheel motor, this structure has the
advantages of reducing size, weight and transmission losses,
and improve economy by eliminating the electric central
propulsion motor and its associated components, including
the transmission, differential, universal joints and drive shaft
(Ammari et al., 2021). In this paper, a BLDC motor is
selected to drive the driving wheel as an in-wheel motor
because of its high efficiency, high power density, and large
speed range (Ammari et al., 2021). In this context, our
objective is to construct a global model including the
inverter, in wheel BLDC motor and the chassis of the EV
taking into account the different non-linear aspects such as
aerodynamic effects, rolling resistance and road load.
The modeling of the road load is crucial in the development
of the model in order to take into account the different forces
generated at the wheel-road contact, in this respect several
models have been proposed e.g. Guo’s model (Guo et al.,
2001), Dugoff’s model (Dugoff et al., 1970), Gim’s model
(Gim et al. 1990), Kiencke’s model (Kiencke et al., 2005)
and Pacejka’s model (Bakker et al., 1987; Pacejka, 2012). In
the present work, Pacejka's model is retained since it
describes more precisely the different forces generated at the
wheel-road contact. In this study a half EV model, describes
the behavior of the vehicle in the two driving modes, i.e.
acceleration mode and deceleration mode, is realized
according to the principle of the bicycle model and based on
the mechanical dynamics of the chassis taking into account
different non-linear aspects such as aerodynamic effects,
rolling resistance, and the Pacejka tire model. A global
cascade controller is used to show the behavior of the
developed model. Numerical simulations have shown that the
developed model presents correctly the longitudinal behavior
of the vehicle.
This paper is organized as follows: Section 2 is devoted to
modeling the association: inverter-In Wheel BLDC motor-
half EV in the longitudinal motion during acceleration and
deceleration modes, thus, a global state-space representation
of the system is given at the end of this section; in section 3,
the developed model is tested in different driving conditions
using a global cascade controller, and its behavior is
illustrated by numerical simulations. A conclusion and
reference list end the paper.
2. SYSTEM MODELLING
2.1 Inverter - in wheel BLDC motor modeling
With the intention of simplifying equations and overall model
the following assumptions are made: (i) Magnetic circuit
saturation is ignored; (ii) Stator resistance, self and mutual
inductance of all phases are equal and constant; (iii)
Hysteresis and eddy current losses are eliminated; (iv) All
semiconductor switches are ideal; (v) The effects of the
armature reaction on the saturation of the magnetic materials
are neglected.
The equivalent model of the association: inverter - in wheel
BLDC motor is shown in Fig. 1. The dynamic equation of the
BLDC in terms of phase variables is expressed as follows:
c
b
a
c
b
a
c
b
a
s
c
b
a
e
e
e
i
i
i
dt
d
i
i
i
R
v
v
v
(1a)
)
3
2
(
)
3
2
(
)(
pF
pF
pF
pK
e
e
e
e
c
b
a
(1b)
where the inductance matrix is
LMM
MLM
MML
are the three phases stator voltages;
s
R
is the resistance
of the stator windings;
L
is the self-inductance of stator
windings;
M
is the mutual inductances; are the currents
of the three stator phase windings; are the back-EMF of
the stator windings;
e
K
is the back-EMF constant;
p
is the
number of pole pairs; is the angular velocity of the rotor
rotation;
is the instantaneous position of the rotor and
p
corresponds to the electrical position of the rotor;
(.)F
gives
the trapezoidal waveform of the back-EMF in each phase of
the stator, it is a function of
p
and can be described in one
period as follows:
2
3
5
)
3
5
(
6
1
3
5
1
3
2
)
3
2
(
6
1
3
2
01
)(
pp
p
pp
p
pF
(2)
The electromagnetic torque developed by the BLDC motor is
the sum of the electromagnetic torques developed by each
phase, it is given by:
cbate
ipFipFipFKT )
3
4
()
3
2
()(
(3)
where
t
K
is the torque constant.
The BLDC In-Wheel motor is driven by a three-phase
voltage source inverter. We have incorporated a
ºconduction operation of the inverter where only two
phases are conducting at the same time. During two-phase
conduction, the DC voltage is applied to the two phases. Only
two equations are needed to construct a state-space
representation. Thus, from the equation (1a) and using the
current relationship , one gets:
)(
3
1
)(
3
1
)(
3
1
)(
3
2
bcbc
s
abab
s
b
s
sb
bcbc
s
abab
s
a
s
sa
Ev
L
Ev
L
i
L
R
dt
di
Ev
L
Ev
L
i
L
R
dt
di
(4)
where the voltages back-EFM phase to phase are defined as
fellow:
ac
cb
ba
ca
bc
ab
ee
ee
ee
E
E
E
and (5)
One can rewrite this model as fellow; those equations
correspond to a reduced model for the dynamics in the ab-
frame:
bc
ab
b
a
s
s
s
b
a
v
v
i
i
R
R
L
dt
di
dt
di
11
12
30
03
3
1
)
3
2
(
)(
11
12
pF
pF
pK
ab
ab
e
(6)
where the function is defined as result:
)
3
2
()()(
pFpFpF
ab
(7)
The BLDC in wheel motor can be controlled by controlling
the value of source voltage , for this end the PWM is used.
Referring to Fig. 1, The duty cycle applied to the higher
switches (,,) is and the lower switch’s (
′,
′,
′)
duty cycle is. The values of the phase to phase voltage
along the time, one can express that as:
Ρ (8a)
Ρπ
(8b)
Where is defined as follow:
(8c)
Let’s substitute the equations (8.a,b,c) into the model (6).
Therefore, the control design for the association of inverter-
BLDC in wheel motor will be performed using the following
equations:
u
p
p
V
x
x
R
R
L
x
x
dc
s
s
s)
3
2
(
)(
11
12
30
03
3
1
2
1
2
1
)
3
2
(
)(
11
12
pF
pF
pK
ab
ab
e
(9)
where , and is the control signal
applied to the inverter trough the duty cycle of two PWM
devices of two consecutive leg of the inverter. Doing so, if
then . The control action is given as a
va
v
b
vc
i
a
i
b
i
c
BLDC
Wheel
Inverter
BLDC commutation control
Vdc
is
S1
S’1
S2
S3
S’2
S’3
a
b
c
v
n
Figure 1. Equivalent circuit of the BLDC In-Wheel motor.

606 Ossama Ammari et al. / IFAC PapersOnLine 55-12 (2022) 604–609
consequence of the positions of the switches (,,,
′,
′,
′). There are six sequences where the motor BLDC is
feed (see Table 1).
Using the relationship of the phase currents,
and the equation (3), one can establish the following
electromagnetic torque:
ate
ipFpFKT )
3
4
()(
b
ipFpF )
3
4
()
3
2
(
(10)
Using the notation of equation (9):
(11)
where the functions and are defined as result:
(12a)
(12b)
2.2 Modeling of the half EV in the longitudinal motion
1) Tire Pacejka’s modeling
The Pacejka model is based on data collected from
measurements made in different tire operations (Bakker et al.,
1987). This model includes the principal parameters such as
longitudinal slip, angular slip, camber angle and vertical load
v
F
. It is capable to describe the characteristics of the
longitudinal force
tx
F
, lateral force
ty
F
and self-aligning
torque
z
M
with high accuracy.
In the present study, only the longitudinal motion of the
vehicle is considered, thus the angular slip and camber angle
are null, so,
ty
F
and
z
M
are null. The longitudinal force
tx
F
at
the wheel-road contact is calculated using Pacejka's model as
follows:
))arctan(sin(
xxxtx
BCDF
(13)
)arctan()()1(
x
x
x
x
B
B
E
E
(14)
In which
is the longitudinal slip, Bx , Cx , Dx and Ex are the
variables that are a function of coefficients
n
b
, where
.
vxx
FD
(15)
21
bFb
vx
(16)
0
bCx
(17)
v
Fb
xx
vv
x
e
DC
FbFb
B
5
4
2
3
(18)
87
2
6
bFbFbE
vvx
(19)
Equation (13) can be expressed as follows:
vtx
FF
(20)
with
denotes the longitudinal adhesion coefficient. Thus,
from (20), the longitudinal adhesion coefficient is defined as
follows:
))arctan(sin( xxx BC
(21)
where
x
is defined in (16).
In order to complete the description of the Pacejka tire model
in a longitudinal motion, one defines the longitudinal slip
as follows (El Majdoub et al., 2012):
In acceleration mode, i.e.
vw
VV
one has
weff
v
w
v
r
V
V
V
11
(22)
In deceleration mode, i.e.
vw VV
one has
11
v
weff
v
w
V
r
V
V
(23)
where
eff
r
indicates the effective radius of the wheel,
w
indicates the angular velocity of the wheel,
w
V
is the speed of
the tire-road contact,
v
V
is the linear velocity of the center of
the wheel.
2) Rolling resistance and aerodynamic resistance
The rolling resistance is defined by (El Majdoub et al., 2012):
effrrvrr
rFM
(24)
where
rr
is the rolling resistance coefficient.
In the presence of a front wind, the aerodynamic resistance is
described by two forces: the aerodynamic drag force
a ex
F
and
the aerodynamic lift force
a ez
F
. These are defined by (El
Majdoub et al., 2012):
2
2
)(
2
1
)(
2
1
avza ez
avxa ex
VVSCF
VVSCF
(25)
Table 1. The sequence of Hall effect.
3) Longitudinal model of half EV with one front driving
wheel (bicycle model)
The longitudinal model with the front driving wheel is used
to describe all the forces acting on the vehicle (Fig. 2). The
different notations are given in Table 2. Considering only the
front wheel is driving. The driving wheel is equipped with a
BLDC in-wheel motor able to generate the driving torque
e
T
.
Switching interval 0º
60º
60º
120º
120º
180º
180º
240º
240º
300º
300º
360º
Sequence
1
2
3
4
5
6
Hall Effect
signals
HA
1
1
0
0
0
1
HB
0
1
1
1
0
0
HC
0 0 0 1 1 1
Switches
Phase A
′
′
OFF
′
′
OFF
Phase B
′ OFF
′
′ OFF
′
Phase C OFF
′
′
OFF
′
′

Ossama Ammari et al. / IFAC PapersOnLine 55-12 (2022) 604–609 607
consequence of the positions of the switches (,,,
′,
′,
′). There are six sequences where the motor BLDC is
feed (see Table 1).
Using the relationship of the phase currents,
and the equation (3), one can establish the following
electromagnetic torque:
ate
ipFpFKT )
3
4
()(
b
ipFpF )
3
4
()
3
2
(
(10)
Using the notation of equation (9):
(11)
where the functions and are defined as result:
(12a)
(12b)
2.2 Modeling of the half EV in the longitudinal motion
1) Tire Pacejka’s modeling
The Pacejka model is based on data collected from
measurements made in different tire operations (Bakker et al.,
1987). This model includes the principal parameters such as
longitudinal slip, angular slip, camber angle and vertical load
v
F
. It is capable to describe the characteristics of the
longitudinal force
tx
F
, lateral force
ty
F
and self-aligning
torque
z
M
with high accuracy.
In the present study, only the longitudinal motion of the
vehicle is considered, thus the angular slip and camber angle
are null, so,
ty
F
and
z
M
are null. The longitudinal force
tx
F
at
the wheel-road contact is calculated using Pacejka's model as
follows:
))arctan(sin(
xxxtx
BCDF
(13)
)arctan()()1(
x
x
x
x
B
B
E
E
(14)
In which
is the longitudinal slip, Bx , Cx , Dx and Ex are the
variables that are a function of coefficients
n
b
, where
.
vxx
FD
(15)
21
bFb
vx
(16)
0
bCx
(17)
v
Fb
xx
vv
x
e
DC
FbFb
B
5
4
2
3
(18)
87
2
6
bFbFbE
vvx
(19)
Equation (13) can be expressed as follows:
vtx
FF
(20)
with
denotes the longitudinal adhesion coefficient. Thus,
from (20), the longitudinal adhesion coefficient is defined as
follows:
))arctan(sin( xxx BC
(21)
where
x
is defined in (16).
In order to complete the description of the Pacejka tire model
in a longitudinal motion, one defines the longitudinal slip
as follows (El Majdoub et al., 2012):
In acceleration mode, i.e.
vw
VV
one has
weff
v
w
v
r
V
V
V
11
(22)
In deceleration mode, i.e.
vw VV
one has
11
v
weff
v
w
V
r
V
V
(23)
where
eff
r
indicates the effective radius of the wheel,
w
indicates the angular velocity of the wheel,
w
V
is the speed of
the tire-road contact,
v
V
is the linear velocity of the center of
the wheel.
2) Rolling resistance and aerodynamic resistance
The rolling resistance is defined by (El Majdoub et al., 2012):
effrrvrr
rFM
(24)
where
rr
is the rolling resistance coefficient.
In the presence of a front wind, the aerodynamic resistance is
described by two forces: the aerodynamic drag force
a ex
F
and
the aerodynamic lift force
a ez
F
. These are defined by (El
Majdoub et al., 2012):
2
2
)(
2
1
)(
2
1
avza ez
avxa ex
VVSCF
VVSCF
(25)
Table 1. The sequence of Hall effect.
3) Longitudinal model of half EV with one front driving
wheel (bicycle model)
The longitudinal model with the front driving wheel is used
to describe all the forces acting on the vehicle (Fig. 2). The
different notations are given in Table 2. Considering only the
front wheel is driving. The driving wheel is equipped with a
BLDC in-wheel motor able to generate the driving torque
e
T
.
Switching interval
0º
60º
60º
120º
120º
180º
180º
240º
240º
300º
300º
360º
Sequence
1
2
3
4
5
6
Hall Effect
signals
HA
1
1
0
0
0
1
HB
0
1
1
1
0
0
HC
0
0
0
1
1
1
Switches
Phase A
′
′
OFF
′
′
OFF
Phase B
′
OFF
′
′
OFF
′
Phase C
OFF
′
′
OFF
′
′
The load distribution of the vehicle along the tires is
determined by applying the fundamental principle of
dynamics.
Table 2. Notations of longitudinal model.
lf
Distance between CoG and the front wheel base
(m)
lr
Distance between CoG and the rear wheel base
(m)
l
Distance between the bases of the two wheels
(m)
h
Height of the gravity centre
(m)
F
aex
Aerodynamic drag force
(N)
Faez Aerodynamic carrying force (N)
g
Gravity acceleration
(ms
-2
)
Mv
Vehicle mass
(kg)
Ftf
Front-wheel drive force
(N)
Ftr
Rear-wheel drive force
(N)
F
vf
Load on the front-wheel
(N)
Fvr Load on the rear-wheel (N)
Road slop
(rad)
A) State-space representation in acceleration mode
vw
VV
Using the Pacejka model and the results established in (El
Majdoub et al., 2012), the state-space representation in
acceleration mode has the following form:
),(
),(
4324
43113
xxfx
xxfTx
e
(26)
where
J
eff
r
1
,
w
Vx
3
,
v
Vx
4
, and
2
4431
)(),(
2
2
cos)1(
2
a
Vxxxf
x
CS
J
eff
r
g
v
M
J
eff
r
1
431431 ),(),( 1
xxxxk v
k
rrv
(27)
),( )(
2
1
)sin(),(
431
2
4432
xxkVxCS
M
gxxf
vax
v
2
4
1
431 )(
2
1
cos),(1)1( az
v
vVxCS
M
gxxk
(28)
where
rf
ll
h
,
rf
f
ll
l
,
1
represents the adhesion
coefficient in acceleration mode and
v
k
represents the load
correction factor.
1
is given by:
))arctan(sin(),( 1431 xxx BCxx
(29)
Where
1
is defined as fellow:
))1(arctan()()1)(1(
3
4
3
4
1
x
x
B
B
E
x
x
E
x
x
x
x
(30)
B) State-space representation in deceleration mode
vw
VV
By using the Pacejka model and the results established in (El
Majdoub et al., 2012), the state-space representation in
deceleration mode is given as:
),(
),(
43
'
24
43
'
1
'
13
xxfx
xxfTx
e
(31)
where
J
eff
r
1
,
w
Vx
3
,
v
Vx
4
, and
2
443
'
1
)(),(
2
2
cos)1(
2
a
Vxxxf
x
CS
J
eff
r
g
v
M
J
eff
r
1
1
),(),( 432432
xxxxk
v
k
rrv
(32)
),()(
2
1
)sin(),( 432
2
443
'
2xxkVxCS
M
gxxf vax
v
2
4
1
432
)(
2
1
cos),(1)1(
az
v
v
VxCS
M
gxxk
(33)
Where
2
represents the adhesion coefficient in deceleration
mode. It is given by:
))arctan(sin(),(
2432
xxx
BCxx
(34)
Where
2
is defined as fellow:
))1(arctan()()1)(1(
4
3
4
3
2 x
x
B
B
E
x
x
Ex
x
x
x
(35)
C) Global state-space representation of the longitudinal
dynamics of half EV with front driving wheel
Combining the two state space representations (26) and (31)
of the two vehicle operating modes into a single state space
representation describing the different operating modes of the
vehicle, one gets:
),(
),(),(
4324
43143
*
13
xxgx
xxgTxxx
e
(36)
with:
),(),(1),(),(),(
43
'
14343143431
xxfxxxxfxxxxg
(37)
),(),(1),(),(),(
43
'
24343243432
xxfxxxxfxxxxg
(38)
'
14314343
*
1),(1),(),(
xxxxxx
(39)
2
)(1
),(
43
43
xxsign
xx
(40)
D) Model of association DC/AC inverter - BLDC In-wheel
motor - chassis vehicle
Using equations (9), (11) and (36), one can build the
following global model, with the relation
reff
r
x
4
. Recall
that
a
ix
1
,
b
ix
2
w
Vx
3
,
v
Vx
4
and
u
is the control signal
applied to the inverter trough the duty cycle of two PWM
devices of two consecutive leg of the inverter.
)
3
2
(
)(
11
12
30
03
3
1
4
2
1
2
1
pF
pF
x
r
pK
x
x
R
R
L
x
x
ab
ab
eff
e
s
s
s
lr
aex
F
tf
F
aez
F
tr
F
vf
F
vr
F
CoG
Mvg
BLDC in-wheel
motor
h
Figure 2. The forces acting on a longitudinal model vehicle.

608 Ossama Ammari et al. / IFAC PapersOnLine 55-12 (2022) 604–609
u
p
p
V
dc
)
3
2
(
)(
11
12
(41a)
),()(),()(),( 4312243
*
11143
*
13 xxgxpxxxpxxx
(41b)
),(
4324
xxgx
(41c)
3. SIMULATION RESULTS
In this section, the overall control system is presented in
order to test the model (Fig. 3). First, the vehicle speed
controller generates the reference current required to drive
the vehicle under the driving conditions. The reference
current is then delivered to the current controller. The current
controller is used to control the switching of the inverter
associated with the BLDC-in wheel motor and ensure that the
vehicle reaches the desired speed.
The three-phase current inverter is controlled by six-step
switching. The switching from one step to another is done by
detecting the rotor position; this information is provided by
the Hall effect sensors as shown in Table 1.
The performances of the model (41) are illustrated by
simulations based on the experimental setup of Fig. 3, where
two PI controllers are used for the speed controller and the
current controller respectively. Note that the reference
trajectory noted
*
w
V
can be transferred to the reference
angular speed of the wheel
ref
by using the following
relationship
refeffw
rV
*
.The numerical values of the
characteristics of the vehicle, as well as those of the BLDC
in-wheel motor are presented in Table 3.The numerical
values of the coefficients
1
b
…
8
b
corresponding to the state of
the road are given in Table 3. By using the usual trial-and-
error search method, the parameters (proportional action,
integral action) of the PI speed controller and the PI current
controller are, respectively: (;), (;).
The driving conditions in the presence of a front wind
hkmVa/10
are as follows:
- Acceleration on a dry road from 60 to 80km/h: ,
- Deceleration on a dry road from 80 to 60km/h: ,
- Acceleration on a wet road from 60 to 80km/h:
,
- Deceleration on a wet road from 80 to 60km/h:
,
- Acceleration on a wet road from 60 to 80km/h: all time
after ,
- Slope on a wet road: .
Figure 4 shows that the speed responses
v
V
and
w
V
do not
show overshoot in acceleration mode. The speed tracking
errors disappear in steady-state. The safety is guaranteed
since the slip is always maintained in the slip safety zone of
, established in (El Majdoub et al., 2013), and that remain
in the safety zone. The electromagnetic torque
e
T
developed
by BLDC in-wheel motor varies according to the speed
demand of the vehicle. By focusing on the acceleration phase
in the time interval between 0s and 8s, it is clear that the
amplitudes of the currents (inverter input current), the
phase currents and , and the back-EMFs
a
e
and
ab
E
also vary according to the speed demand of the vehicle.
PWM
&
Decoder
Carrier
Inverter BLDC
S1
S2
S3
S1’
S2
’
S3’
Vdc
Current
Controller
is,ref
-
+
-
is
HA HB HC
Ωw
Speed
Controller
-
+
-
Ωref
Figure 3. Speed and Current Controllers for the association inverter
–
BLDC in-wheel Motor.
 6
6
1
/
6
100%