Ph. Dorléans Systèmes asservis continus ESIX 1A - L3 SPI EII
Université de Caen Basse Normandie - 20 -
3 – PERFORMANCES D'UN SYSTEME ASSERVIS
Objectif : faire suivre le mieux possible la sortie du système y(t) vers le signal de référence y*(t) malgré
la présence de perturbations qui agissent sur le système. De plus, la commande u(t) doit toujours être
admissible pour le système. Cela constitue les objectifs de performances.
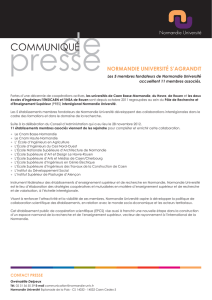
I – Structure générale
Figure 3.1 : Système en boucle fermée
pL1
1
)p(S
fonction de sensibilité.
pL1
pL
)p(T
fonction de sensibilité complémentaire.
)p()p(S)p(G)p()p(S)p(*Y)p(T)p(Y uy
)p()p(T)p()p(*Y)p(S)p(C)p(U uy
II – Notion de précision
Précision statique régime permanent
Précision dynamique régime transitoire
)p()p(G)p()p(*Y)p(S)p()p(G)p()p(*Y
)p(L1
1
)p( uyuy
II.1 - Précision statique
Etude de l'erreur statique pour des signaux de la forme :
)t(e
!1n
t
)t(y
1n
*
n
n
*
np
1
)p(Y
Pour une consigne
*
n
1
Yp p
, le signal d'erreur s'exprime par :
nn
pLp p
1
1
1.
La condition d'annulation asymptotique de l'erreur est obtenue si le transfert en boucle ouverte L(p)
comporte au moins n intégrateurs.
y(t)
G(p)
u(t)
y*(t) +
+
y(t)
C(p)
+ (t)
-
+
u(t)
+

Ph. Dorléans Systèmes asservis continus ESIX 1A - L3 SPI EII
Université de Caen Basse Normandie - 21 -
II.1.1 – Etude du suivi de signaux en forme d'échelons (n = 1)
Pour éliminer une erreur de position, il faut donc au moins 1 intégrateur ( 1) dans L(p).
II.1.2 – Etude du suivi de signaux en forme de rampes (n = 2)
Pour éliminer une erreur de traînage, il faut au moins deux intégrateurs ( 2) dans L(p).
II.1.3 – Etude du suivi de signaux en forme de paraboles (n = 3)
Pour éliminer une erreur d'accélération, il faut au moins trois intégrateurs ( 3) dans L(p).
Bilan :
Classe 0 Classe 1 Classe 2
Echelon 1/Kp 0 0
Rampe 1/Kv 0
Parabole 1/Ka
Erreur statique selon la classe des systèmes et la nature des signaux
II.1.4 – Cas de la perturbation de commande
L'annulation de l'erreur statique )(
n pour une perturbation de commande implique la présence d'au
moins n intégrateurs dans le correcteur C(p).
Règle générale pour le problème de régulation :
En régulation, pour annuler un écart statique d'ordre n, il faut qu'il y ait dans la boucle ouverte L(p) au
moins n intégrateurs situés en amont de l'endroit où se situe la perturbation.
II.1.5 – Application
Cas du moteur à couant continu : 22
(p) k
=
U (p) J L p + p (L f + R J) + R f + k
Approximation :
p1p1
K
)p(U
)p(Y
)p(G
em

Ph. Dorléans Systèmes asservis continus ESIX 1A - L3 SPI EII
Université de Caen Basse Normandie - 22 -
Généralement em par conséquent,
p1
K
)p(G
m
Poursuite et régulation pour 2 types de correcteur : C(p) = 0.1 et p
5
)p(C .
Le système a un gain statique de K = 6 et la constante de temps est de m = 0,01 sec.
Etude du suivi de signaux en forme d'échelons unitaires (n = 1)
Figure 3.2 : Problème de poursuite, réponses
indicielles du système en boucle fermée
Figure 3.3 : Signaux d'erreur correspondants
Etude du rejet d'une perturbation de sortie en forme d'échelons unitaires (n = 1)
Figure 3.4 : Problème de régulation, réponses du
système en boucle fermée
Figure 3.5 : Signaux d'erreur correspondants
Etude du rejet d'une perturbation de commande en forme d'échelons unitaires (n = 1)
Pour C(p) = 0.1, 75,3
6,01
6
)0(L1
)0(G
)(
1
.
Pour p
5
)p(C , C(p) est de classe 1 par conséquent, 0)(
1
.

Ph. Dorléans Systèmes asservis continus ESIX 1A - L3 SPI EII
Université de Caen Basse Normandie - 23 -
Figure 3.6 : Problème de régulation, réponses du
système en boucle fermée
Figure 3.7 : Signaux d'erreur correspondants
Etude du suivi de signaux en forme de rampes (n = 2)
Figure 3.8 : Problème de poursuite, réponses du
système en boucle fermée
Figure 3.9 : Signaux d'erreur correspondants
Etude du rejet de perturbations en forme de rampes unitaires (n = 1)
Figure 3.10 : Problème de régulation, réponses du
système en boucle fermée
Figure 3.11 : Signal d'erreur correspondant
II.2 - Précision dynamique
Etudier le comportement du signal d'erreur (t) lorsqu'il passe d'un régime permanent à un autre régime
permanent régime transitoire précision dynamique.

Ph. Dorléans Systèmes asservis continus ESIX 1A - L3 SPI EII
Université de Caen Basse Normandie - 24 -
Assurer une bonne précision dynamique garantir un bon comportement de la partie transitoire de (t)
(temps de réponse faible et dépassement limité voire pas de dépassement).
II.2.1 - Rapidité
II.2.1.1 - Localisation des pôles dans le plan [p]
Soit :
papapa
bpbpb
)p(D
)p(N
)p(G 1
1
n
n
01
m
m
n
1i
i
m
1j
j
n
m
)pp(
)zp(
a
b
Décomposition sous forme d’une somme de fractions rationnelles du premier et du second ordre :
21 n
1j 2j0j0j
2
jj
n
1i i
i
p2p
CB
pp
A
)p(G
Dans le cas où G(p) possèdent n pôles distincts p1, p2, …, pn :
1 pôle réel pi réponse transitoire de type :
1
i
n
1i
tp
ie.
Si ii
p décroissance finale de cette contribution en ii
1/
.
2 pôles complexes conjugués k0kk jp
réponse transitoire de type
tsine k0
t
k oscillation de pulsation propre k0
amortie par une exponentielle
décroissante caractérisée par la constante de temps kk
1/
.
Durée des transitoires d'un système d'ordre quelconque déterminée par l'ensemble des constantes de
temps associées à ces différents modes. La rapidité du transitoire est d'autant plus importante que les
modes correspondants convergeront plus rapidement vers zéro.
On peut conclure qu'un système est d’autant plus rapide que sa plus grande constante de temps est
petite et donc que le pôle correspondant est réel négatif.
Remarque :
Dans un contexte d'asservissement, imposer un temps de réponse revient à imposer une constante de
temps maximum pour le système bouclé et donc cela revient à imposer une condition du type imax
.
Tous les pôles du système en boucle fermée doivent être placés à gauche d'une verticale max
/1
dans
le plan complexe (figure 3.12).
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
1
/
38
100%