1
Chapitre I : MACHINES TRIPHASÉS À INDUCTION
(MACHINES ASYNCHRONES)
I.1. Constitution :
Une machine à induction triphasé comprend deux parties principales : le stator (partie fixe) et
le rotor (partie mobile).
1. Le stator comporte une carcasse en acier renfermant un empilage de tôles
ferromagnétiques identiques qui constituent un cylindre creux : ces tôles sont percées
de trous à leur périphérie intérieure. L’alignement de ces trous forme des encoches
dans lesquelles on loge un bobinage triphasé 2p pôles. Ce bobinage logé dans le circuit
magnétique est appelé primaire de la machine asynchrone (Fig. I.1).
2. Le rotor se compose d’un cylindre de tôles ferromagnétiques poinçonnées à leur
périphérie extérieure pour former les encoches destinées à recevoir des conducteurs. Il
existe deux types de rotor : le rotor bobiné et le rotor à cage d’écureuil (rotor en court-
circuit) (Fig. I.2).
Le rotor bobiné comprend un bobinage généralement triphasé logé dans les
encoches, de même nombre de paires de pôles que le primaire. Ce bobinage dit
secondaire de la machine asynchrone est le plus souvent connecté en étoile : les
sommets de l’étoile sont reliés à des bagues portées sur l’arbre de la machine et sur
lesquelles frottent des balais isolés (les bagues sont aussi électriquement isolées). Ces
bagues permettent, par l’intermédiaire des balais, d’insérer des résistances en série
avec chacun des enroulements du bobinage triphasé. Ces résistances sont utilisées au
démarrage de la machine asynchrone. En fonctionnement normal, les trois ballais sont
court-circuités.
Le rotor à cage d’écureuil est constitué de barres conductrices nues (en cuivre
ou en aluminium) traversant l’empilement de tôles du rotor, parallèlement à l’axe et
court-circuitées à leurs extrémités par deux anneaux conducteurs de faible résistance.

2
Remarque :
Dans une machine asynchrone, il ya intérêt à réduire au maximum le flux de fuite et pour cela
on réalise un entrefer très petit de l’ordre de 1 mm et moins si possible. Dans ce but, on utilise
toujours des rotors et stators lisses et l’on soigne particulièrement l’usinage des surfaces
statoriques et rotoriques.

3
3. Plaque signalétique : c’est une plaque qui englobe toutes les caractéristiques
nominales électriques et mécaniques de la machine.
Exemple de plaque signalétique :

4
4. Plaque à bornes : Plaque à bornes : utilisée pour le couplage étoile ou triangle de la
machine sur un réseau électrique en fonction de la tension efficace phase-phase de ce
dernier.
I.1.bis: Théorème de Ferraris :
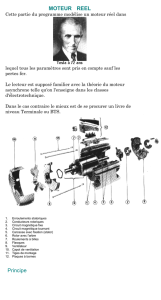
On considère maintenant une machine comportant trois bobinages identiques mais décalés
spatialement les uns par rapport aux autres de 2π/3. Pour des raisons "physiques" de
constitution des machines, ces bobinages seront supposés situés au stator conformément à la
figure I.5 ci-dessous :

5
Figure I.5
Théorème de Ferraris:
De la relation Ωs = ω/p, nous déduisons la relation suivante :
Avec :
À la fréquence industrielle de 50 Hz et 60 Hz, les vitesses de rotation du champ tournant ou
de synchronisme en fonction du nombre de pôles sont résumées dans le tableau suivant :
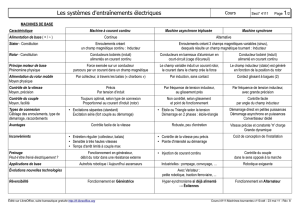
Machine à
nommée
f = 50 Hz
f = 60 Hz
ns en tr/min
ns en tr/min
deux pôles (p = 1)
Bipolaire
3000
3600
Quatre pôles (p = 2)
Tetrapolaire
1500
1800
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%