Section28.Programmationsérieencircuit™(ICSP™)
28
ICSP
POINTSFORTS
M
DS31028Apage2811997MicrochipTechnologyInc.
Cettesectiondumanuelcontientlessujetsprincipauxsuivants:
28.6Autresavantages................................................................................................................................287
28.2Accèsaumodedeprogrammationsérieencircuit..............................................................28328.3Circuit
d'application..................................................................................................................28428.4
Programmateur....................................................................................................................................28628.5
Environnementdeprogrammation........................................................................................286
28.1Introduction..............................................................................................................................................282
28.7ProgrammationsurleterraindesMCUPICmicroOTP.....................................................................28828.8
ProgrammationsurleterraindesmicrosFLASHPIC.................................................................281028.9Conseilsde
conception......................................................................................................................................281228.10Notes
d'applicationassociées........................................................................................................281328.11Historiquedes
révisions......................................................................................................................2814
Machine Translated by Google

28.1 Introduction
DS31028Apage282 1997MicrochipTechnologyInc.
dispositifs.
délaidecommercialisationdevotreproduit.Enassemblantvotreproduitavecunmicrocontrôleur(MCU)Microchipvierge,vouspouvez
stockerunseulmodèle.Lorsqu'unecommandeaétépassée,cesunitéspeuventêtreprogramméesavecladernièrerévisiondu
micrologiciel,testéesetexpédiéesdansundélaitrèscourt.Ce
Touslesappareilsdemilieudegammepeuventêtreprogrammésensérieencircuit(ICSP™)dansl'applicationfinale
plustard,fournitunmoyendemettreàniveauvotremicrologicielsurleterraind'unemanièresimilaireàcellebaséesurEEPROMouFlash.
Laprogrammationsérieencircuit(ICSP™)estunexcellentmoyenderéduirevosfraisgénérauxd'inventaireet
êtreprogramméplusieursfoisenfonctiondelatailledufirmware.Cetteméthode,expliquée
LaplupartdesgenspenseraientàutiliserICSPaveclesmicrocontrôleursPICmicro™OTPuniquementsurunechaîned'assemblage.
lamasseetlatensiondeprogrammation.
oùl'appareilestprogramméunefois.Cependant,ilexisteuneméthodeparlaquelleunpériphériqueOTPpeut
Cetteméthoderéduitégalementlesstocksmisaurebutenraisond’anciennesrévisionsdumicrologiciel.Cetypedesystèmedefabrication
peutégalementfaciliterdesdélaisd'exécutionrapidespourlescommandespersonnaliséesdevotreproduit.
circuit.Celasefaitsimplementavecdeuxlignespourl'horlogeetlesdonnées,ettroisautreslignespourl'alimentation,
FAMILLEDEMCUMILIEUDEGAMMEPICmicro
Machine Translated by Google

Accèsaumodedeprogrammationsérieencircuit
28.2
1997MicrochipTechnologyInc. DS31028Apage283
28
lieu00h.Unecommande6bitsestensuitefournieàl'appareil.Certainescommandesprécisentalorsque
L'appareilestplacéenmodeprogrammation/vérificationenmaintenantlesbrochesRB6etRB7bassestoutenélevantlabroche
MCLR(VPP)deVILàVIHH(voirlesspécificationsdeprogrammation)etenayantVDDauniveau
Aprèsréinitialisation,pourmettrel'appareilenmodeprogrammation/vérification,lecompteurdeprogramme(PC)està
réinitialisationdel'appareil.
Spécificationsdeprogrammationspécifiques.
données,ils'agitd'unpilotedesortieCMOS.
Pendantlemodedeprogrammationsérieencircuit,lescircuitsWDTnepeuventpasgénérerdesignal.
14bitsdedonnéesdeprogrammesontensuitefournisoulusàpartirdel'appareil,selonquelacommandeétaitunchargementou
unelecture.Pourplusdedétailssurlaprogrammationsérie,veuillezvousréféreràl'appareil
tensiondeprogrammation.RB6devientl'horlogedeprogrammationetRB7devientlesdonnéesdeprogrammation.RB6etRB7sont
desentréesSchmittTriggerdanscemode,etlorsqueRB7conduit
Article28.ICSP
ICSP
Machine Translated by Google

Circuitd'application
28.3
ConnecteurICSP
Circuitsd'isolement
RB6
MCLR/VPP
1997MicrochipTechnologyInc.
RB7
PIC16CXXX
DS31028Apage284
Carted'application
Verslecircuitd'application
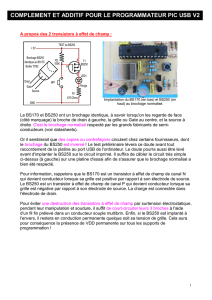
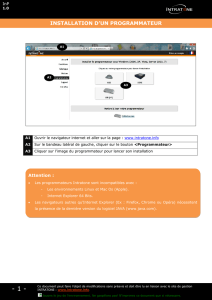
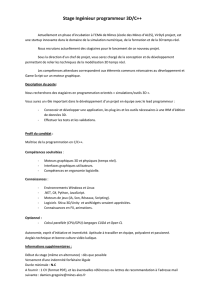
Figure281:Circuitd'applicationtypiquedeprogrammationsérieencircuit(ICSP)
Poursimplifiercetteinterface,l'utilisationoptimaledecesE/Sdansl'applicationest(dansl'ordre):
Lecircuitd'applicationdoitêtreconçupourpermettreàtouslessignauxdeprogrammationd'êtredirectementconnectésau
PICmicroMCU.Lafigure281montreuncircuittypiquequiconstitueunpointdedépartpourlaconceptionavecICSP.
L'applicationdoitcompenserlesproblèmessuivants:•IsolationdelabrocheMCLR/VPPdurestedu
circuit•ChargementdesbrochesRB6etRB7•Capacitésurchacunedes
brochesVDD,MCLR/VPP,RB6etRB7•
MinimumettensiondefonctionnementmaximalepourVDD•OscillateurPICmicro•
InterfaceavecleprogrammateurLabrocheMCLR/VPPest
normalementconnectéeà
uncircuitRC.Larésistancederappel
estliéeauVDDetuncondensateurestliéàlaterre.Cecircuitpeutaffecterlefonctionnementdel'ICSPenfonctiondela
tailleducondensateurpuisquelatensionVPPdoitêtreisoléeduresteducircuit(danslaplupartdescas,unerésistance
n'estpascapabled'isolerlecircuit).Ilestdoncrecommandéd'utiliserlecircuitdelafigure281lorsqu'unRCestconnecté
auMCLR/VPP.LadiodedoitêtreunappareildetypeSchottky.UnautreproblèmeavecMCLR/VPPestquelorsquele
périphériquePICmicroestprogrammé,cettebrocheestpilotéeàenviron13Vetégalementàlamasse.Lecircuit
d’applicationdoitdoncêtreisolédecettetensionfournieparleprogrammateur.
2.Utilisezcesbrochescommesortiesavecunechargeminimalesurlalignedesignal.
3.Circuitsd'isolationafinquecessignauxpuissentêtrepilotésselonlesspécificationsICSP.
1.N'utilisezpasRB6/RB7carilssontdédiésàICSP.
LesbrochesRB6etRB7sontutiliséesparlePICmicropourlaprogrammationsérie.RB6estlaligned'horlogeetRB7estla
lignededonnées.RB6estpilotéparleprogrammeur.RB7estunebrochebidirectionnellepilotéeparleprogrammeurlors
delaprogrammationetpilotéeparlePICmicrolorsdelavérification.Cesbrochesdoiventêtreisoléesduresteducircuit
applicatifafindenepasaffecterlessignauxlorsdelaprogrammation.Vousdevezprendreenconsidérationl'impédancede
sortieduprogrammateurlorsdel'isolationdeRB6etRB7duresteducircuit.Cecircuitd'isolationdoittenircomptedufait
queRB6estuneentréesurlePICmicroetqueRB7estbidirectionnel(peutêtrepilotéàlafoisparlePICmicroetle
programmateur).Parexemple,PROMATE®IIauneimpédancedesortiede1kΩ.Silaconceptionlepermet,cesbroches
nedoiventpasêtreutiliséesparl'application.Cen'estpaslecasaveclaplupartdesapplications,ilestdoncrecommandé
auconcepteurd'évaluersicessignauxdoiventêtremisenmémoiretampon.Entantqueconcepteur,vousdevezréfléchir
autypedecircuitsconnectésauxRB6etRB7,puisprendreunedécisionsurlamanièred'isolercesbroches.Lafigure281
nemontreaucuncircuitpourisolerRB6etRB7surlecircuitd'applicationcarceladépendfortementdel'application.
FAMILLEDEMCUMILIEUDEGAMMEPICmicro
VDD
VSS
VDDVDD
Machine Translated by Google

massependantlaprogrammation.Celaempêcheratouteoscillationdeseproduirependantlaprogrammation.
surl’environnementdeprogrammationetserontabordésdanscettesection.
Laméthodeseraitdedemanderàl'interfacedeprogrammationdepiloterlabrocheOSC1duPICmicropour
effetsducircuitd'applicationsurletimingdessignauxdeprogrammation.Deschangementspeuvent
MCLR/VPPdoitatteindrelatensiond'entréeenmodeprogrammespécifiéeavantquel'appareilexécutetout
LesbrochesVDDontlestauxdemontéecorrectsetdoiventégalementfournirsuffisammentdecourantpouralimenterlecircuit
d'application.RB6etRB7nesontpasmisenmémoiretamponsurceschémamaispeuventnécessiterunemiseenmémoire
tamponenfonctiondel'application.UnexempledeschémadecartepiloteestprésentédanslaFigure282.
portéedusystème.
deX.IlexisteplusieursalternativesquipeuventcompenseruntauxdemontéelentsurMCLR/VPP.Le
utilisé.LeprogrammeurdoitconduireleMCLR/VPPàlatensiond'entréeenmodeprogrammeavantleRC
pilotedansleprogrammeurpourrespecterleshorairesdetauxdemontéepourVDD.Laplupartdesprogrammeurssontconçus
l'appareildoitêtrevérifiéauxtensionsminimaleetmaximaleauxquelleslecircuitd'application
chasséduprogrammeur.Lescircuitstypiquesutilisentplusieurscentainesdemicrofaradsdecapacitésur
LaspécificationdeprogrammationdeMicrochipindiquequel'appareildoitêtreprogramméà5V.
Laminuteriededémarragedel'oscillateurattend1024oscillationsavantqu'uncodenesoitexécuté.Cependant,RC
Ilneresteplusqu'àconnecterlecircuitd'applicationauprogrammateur.Celadépendbeaucoup
Ledernierproblèmeconcernelecircuitoscillateursurlacarted'application.Latensionsur
Remarque:laconceptiondelacartepiloteDOITêtretestéedansl'applicationdel'utilisateurpourdéterminerle
Lacapacitétotalesurlesbrochesdeprogrammationaffectelestauxdemontéedecessignauxaufuretàmesurequ'ilssont
êtrerequissil’applicationimposeunechargeimportantesurVDD,VPP,RB6OURB7.
LapremièreméthodeseraitdenepasremplirleR,deprogrammerl'appareil,puisd'insérerleR.L'autre
seraincrémentéjusqu'àunecertainevaleurX.Désormais,lorsquel'appareilentreenmodedeprogrammation,lecompteurdu
programmeneserapaszéroetleprogrammateurcommenceraàprogrammervotrecodeavecundécalage.
circuit.LacartepilotenécessiteunealimentationséparéecapabledepiloterleVPPet
etdoitvérifierlecontenudelamémoireduprogrammeà2,7Vet4,5Vpours'assurerquelesmargesdeprogrammation
appropriéesontétéatteintes.CelagarantitlefonctionnementduPICmicrosurlatension
seraopérationnel.Parexemple,unsystèmealimentéparbatteriepeutfonctionneràpartirdetroiscellulesde1,5V,cequidonne
uneplagedetensiondefonctionnementde2,7Và4,5V.Leprogrammeurdoitprogrammerl'appareilà5V
IlsuffitdeprogrammerlePICmicroluimêmeetdenepasdisposerdepilotessuffisammentpuissantspouralimenterlecircuit
d'application.Unesolutionconsisteàutiliserunecartepiloteentreleprogrammeuretl'application.
l'oscillateurbasculequatrefois.Sil'oscillateurRCbasculequatrefoisouplus,lecompteurdeprogramme
code.LesmodescristaldisponiblessurlePICmicronesontpasaffectésparceproblèmecarle
Desconsidérationsparticulièresdoiventêtreprisessivotrecircuitd'applicationfonctionneuniquementà3V.Cesconsidérations
peuventinclurel'isolementtotalduPICmicropendantlaprogrammation.L'autreproblèmeestque
VDDquiaideàatténuerlebruitetlesondulations.Cependant,cettecapaciténécessiteunepuissanceassezforte
Lesoscillateursnenécessitentaucuntempsdedémarrageet,parconséquent,laminuteriededémarragedel'oscillateurn'estpas
28
1997MicrochipTechnologyInc. DS31028Apage285
Article28.ICSP
ICSP
Machine Translated by Google
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%