Diagnostic des défauts : Analyse vibratoire et thermographie
Telechargé par
padjichristian

Diagnostic des défauts
Ahmed Ghorbel
AU : 2018 – 2019 1
Sommaire
Avant-propos ......................................................................................................... 2
PARTIE I : SURVEILLANCE DES MACHINES PAR ANALYSE VIBRATOIRE
Chapitre 1 : Maintenance et techniques de Surveillance ...................................................... 4
Chapitre 2 : Vibration des machines tournantes ................................................................. 15
Chapitre 3 : Stratégies de surveillance vibratoire ............................................................... 28
Chapitre 4 : Capteurs de vibration et traitement des signaux ........................................... 39
Chapitre 5 : Signatures vibratoires des principaux défauts mécaniques……………… .. 51
Travaux dirigés ..………………………………………………………………………….…77
PARTIE II : THERMOGRAPHIE INFRAROUGE
Chapitre 1 : Base théorique de la thermographie ............................................................. 101
Chapitre 2 : Imagerie thermique et applications industrielles ........................................ 109
Travaux dirigés ..…………………………………………………………………………...118

Diagnostic des défauts
Ahmed Ghorbel
AU : 2018 – 2019 2
AVANT-PROPOS
Les industriels sont confrontés généralement à un double défi économique. D’une part, ils
doivent augmenter la flexibilité et la productivité par une disponibilité accrue de leur outil de
production et d’autre part ils doivent diminuer les coûts d'entretien et de réparation.
Pour cela, les industriels ont cherché des méthodes de maintenance efficaces et performantes
permettant sans démontage ou arrêt de fabrication, de prévenir la panne. Cette méthode
s'appelle la maintenance conditionnelle ; elle est basée essentiellement sur la surveillance de
l’état de santé des machines sans être obligé d’arrêter la production. Le recours à des techniques
de surveillance fiables nécessite des investissements en matériel d’acquisition et en ressources
humaines habilitées et compétentes dans le domaine.
Cet ouvrage expose les techniques de surveillance les plus fréquentes en maintenance
prédictive, et sont présentées en quatre parties : l’analyse vibratoire et thermographie
infrarouge. La vibration est considérée comme le meilleur paramètre de fonctionnement pour
juger les conditions dynamiques telles que déséquilibre, défauts de roulements… Beaucoup de
problèmes de machines se montrent comme des vibrations excessives. Déséquilibre du rotor,
désalignement, le relâchement mécanique, la résonance structurelle, défauts de fondation non
rigide, et défaut d’engrenage sont quelques défauts qui peuvent être mesurés par analyse
vibratoire. La mesure de la vibration "globale" d'une machine, d'un rotor par rapport à une
machine ou la structure d'une machine, et la comparaison de la mesure à sa valeur normale
(norme) indique l'état de santé actuel de la machine.
L’analyse thermographique est un outil de maintenance prédictive efficace à utiliser en
conjonction avec d'autres types de procédés de « condition monitoring ». Le plus grand
avantage de la thermographie est qu’elle est utilisée pour identifier une série de problèmes
possibles sur la base de l'état des divers types de machines. Cette partie explique le processus
de la thermographie et discute les avantages et les inconvénients de ce type d'analyse. Pour
utiliser l'appareil photo thermique et créer des rapports efficaces, on a besoin d'acquérir une
compréhension générale de la science derrière la thermographie infrarouge. Cette partie va
exposer la terminologie et les compétences nécessaires pour commencer à utiliser une caméra
infrarouge.
Cet ouvrage constitue un support pratique pour la mise en place d’une politique de maintenance
prévisionnelle basée sur les deux techniques. A la fin de chaque partie, un nombre des
problèmes et exercices est présenté permettant aux étudiants de mieux assimilés les
phénomènes étudiés. Ce travail est une modeste contribution à l’enrichissement de la
bibliothèque mécanique qui est pourvue d’ouvrages spécialisés en techniques de maintenance
prédictive.

Diagnostic des défauts
Ahmed Ghorbel
AU : 2018 – 2019 3
La surveillance par analyse vibratoire fait appel à plusieurs disciplines mathématiques,
traitement de signal, et informatique.
Cette partie qui contient quatre chapitres a été consacrée pour la mise en situation de la
maintenance prédictive, sa position par rapport à d’autres formes de maintenance ainsi qu’à sa
contribution à la réduction des coûts de maintenance. Une présentation générale des techniques
de surveillance pratiquées dans la maintenance prédictive, les conditions de choix des méthodes
et des indicateurs de surveillance.
Le deuxième chapitre est une introduction aux vibrations mécaniques, nature et paramètres
caractéristiques. Elle traite aussi les indicateurs utilisés pour la surveillance et le diagnostic des
machines avec indication des seuils d’admissibilités.
Le troisième Chapitre décrit les stratégies surveillance vibratoire.
Le quatrième chapitre porte sur le matériel d’acquisition, ses caractéristiques techniques et les
outils d’analyse et de traitement des signaux.
Le cinquième chapitre présente les signatures vibratoires, de la majorité des défauts
mécaniques, permettant de faire le diagnostic des machines.
PARTIE I :
SURVEILLANCE DES MACHINES PAR
ANALYSE VIBRATOIRE

Diagnostic des défauts
Ahmed Ghorbel
AU : 2018 – 2019 4
Chapitre 1
Maintenance et techniques de Surveillance
1.
Enjeux de la maintenance
1.1. Méthodes de maintenance
1.2. Coût de maintenance
2. Surveillance des équipements
2.1. Méthodes de surveillance
2.2. Indicateurs de surveillance
2.3. Notion de seuils
3. Techniques de surveillance
3.1. Analyse vibratoire
3.2. Thermographie infrarouge
3.3. Mesure ultrasonore
3.4. Analyse des huiles
3.5. Analyse du bruit
3.6. Conclusion

Diagnostic des défauts
Ahmed Ghorbel
AU : 2018 – 2019 5
1. Enjeux de la maintenance
Dans des conditions normales, le fonctionnement d’une installation entraîne un vieillissement
plus ou moins accentués du matériel, et parfois même des incidents ou accidents. Pour en
assurer une exploitation correcte, Il est nécessaire de maintenir cette installation en bon état.
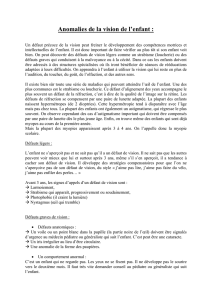
En fait le comportement d’une installation en service pendant son cycle de vie est représenté
par une courbe en baignoire qui se divise en trois périodes distinctes (Figure 1.1) :
Une période de rodage : pendant cette période l’installation est en garantie, et le taux de
défaillance est décroissant. La probabilité de défaillance est élevée vue les défaillances
précoces dues aux défauts de conception, de fabrication, de montage ou de mise en place.
Aucune intervention n’est préconisée durant cette période.
Une période de maturité : c’est la période de vie utile, la défaillance dans ce cas est
accidentelle. Une politique de maintenance corrective est souhaitable.
Une période de vieillissement : l’usure des composants devient remarquable et la
probabilité de défaillance augmente sous l’effet du vieillissement. Le suivi des
dégradations devient de plus en plus nécessaire.
Figure 1.1. Courbe en baignoire
1.1. Méthodes de maintenance
«La maintenance est l’ensemble des actions techniques, administratives et de management
durant le cycle de vie d’un bien, destinées à le maintenir ou à le rétablir dans un état dans
lequel il peut accomplir la fonction requise » (norme NF EN 13306).
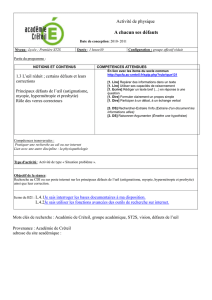
Trois méthodes principales de maintenance sont utilisées dans l'industrie (Figure 1.2).
a. Maintenance corrective
Elle consiste à laisser tourner la machine jusqu'à la défaillance totale, puis effectuer les
réparations nécessaires. Ce type de stratégie peut entraîner des pertes de production et des frais
de réparations plus importants. De plus, une réparation non planifiée entraînera des coûts élevés.
Taux de défaillance
Précoce
Vie utile
Usure
Durée de vie
Rodage
Maturité
Vieillissement
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
1
/
120
100%