Lycée de Békalta. Labo Informatique

Qu’est-ce que la programmation ?
Les ……………………. et beaucoup d’autres appareils
électroniques fonctionnent en suivant ……………………. qui leur
sont données par un ordinateur. Mais d’abord, une personne
doit apprendre à l’ordinateur les instructions à réaliser et à
quel moment les réaliser.
Les ………………….. qu’une personne donne à un
ordinateur sont appelées un ……………………, et créer un
programme, c’est de la …………………... Les personnes qui
créent ces programmes sont appelées des …………………..
C’est quoi un robot ?
Les robots sont des dispositifs ………………….. et ………………….. composés de …………………..
collectant certaines données (par exemple, l’inclinaison ou la distance) et capables de modifier
leurs comportements selon la ………………….. qui a été établie.

La programmation permet de donner des instructions aux robots sur la manière de collecter
les informations de l’environnement (…………………..), de ………………….. leurs actions et …………………..
par le biais des ………………….. qui vont faire réaliser des actions au robot (mouvements, lumière,
sons, ...).
Relation entre la programmation et les robots
Ils permettent de traduire une grandeur …………
(un phénomène) en un ……………. Ce dernier est
ensuite numérisé pour être transmis au système
informatique.
Par exemple : un capteur de température permet
de traduire l’amplitude de la température en une
tension électrique. Cette dernière est numérisée
puis transmise.
Ils permettent d’agir dans le monde physique, c’est-à-dire,
changer son état.
Actionneurs couramment utilisés :
- Allumage d’un éclairage
- Déclenchement d’un avertisseur sonore
- Allumage d’une machine
- Génération de mouvements (ex. servomoteur)
- Commande de robots
- Commande de moteurs (à courant continu, pas-à-pas, etc.)
- Contrôle de débits (air, pression, liquides, etc.)
Domaine d’utilisation
…………………..
…………………..
…………………..
…………………..
…………………..

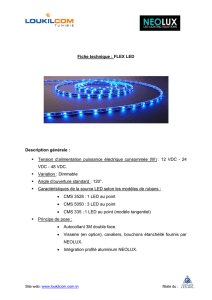
Les interfaces programmables :
C’est une puce de type SOC(System On Chip) mise
sur un ………………….. et une ………………….. de
développement permettant de créer facilement des projets.
La carte ESP32 est mise sur un module qui s’appelle
WROOM32 et sur une plateforme de développement qui
s’appelle DEVKIT V1.
Technologie de Communication :

On aura besoin de…
LED Resistance Fils électrique Carte ESP32 Plaquette d’essai
I- Se préparer
1- Brancher la carte ESP32 à a la plaquette d’essai.
2- Brancher la résistance au Pin GND de la carte ESP32
Qu’est-ce qu’une LED ?
Comme une ampoule normale, une LED s’allume et s’éteint
quand l’électricité la traverse. LED ou DEL est le sigle pour Diode
Electro-Luminescente. Il existe des LED de différentes sortes et de
différentes couleurs . Les lumières dans les feux tricolores les plus
récents utilisent des groupes de LED.
La carte ESP32 a de nombreux PIN différents. Chacun d’entre
eux est étiqueté et sert à connecter différentes pièces.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%