Projet de Mécanique des Milieux Continus :
Extensométrie (Anneau)
Version du 01/12/2020
1. Préambule
Ce projet est inspiré d’un sujet d’étude proposé par l’Ecole Centrale de Lyon. Un remerciement
particulier est adressé au Maître de Conférences Laurent BLANC.
2. Objectif du Projet
La Mécanique des Milieux Continus permet de construire par le calcul des modèles de comportement
des pièces mécaniques. Mais qu’il s’agisse de formules de résistance des matériaux ou de maquettes
numériques obtenues par des logiciels, ces modèles doivent être validés par la vérification des
hypothèses de travail et par la corrélation avec une mesure des contraintes réellement subies par la
pièce.
3. Description du système étudié.
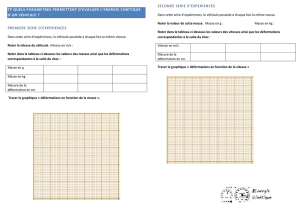
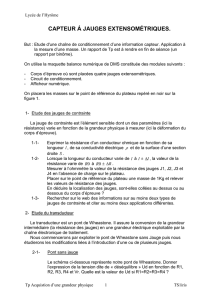
Le support de l’étude est un anneau en polycarbonate. Il est suspendu au bâti par l’intermédiaire d’un
galet support. Un effort diamétral est appliqué via un galet de chargement à l’aide de masses
marquées. Sous l’effet de la charge, l’anneau se déforme.
Figure 1 : Montage expérimental de l’étude : a. Capture du montage physique installé à l’Ecole Centrale de Lyon. b. schéma
focalisé sur l’anneau avec son point d’attache au bâti et son point de chargement
a.
b.

Les données numériques concernant la géométrie de l’anneau sont : diamètre extérieur De = 210mm,
diamètre intérieur Di = 120mm, épaisseur h = 10mm. Trois niveaux de chargement seront considérés,
correspondant à des masses de valeur M = 5, 10 et 15 kg. Dans cette gamme d’efforts, le polycarbonate
est supposé avoir un comportement élastique linéaire isotrope caractérisé par un module d’Young E =
2300MPa et un coefficient de Poisson ν = 0.4. Sa résistance à la traction est de Re = 70MPa.
4. Etude par extensométrie électrique.
a. Présentation du matériel de mesure.
Introduction : La Mécanique des Milieux Continus fait intervenir quatre types de quantités : les
déplacements et les efforts extérieurs d’une part ; les déformations et les contraintes d’autre part. La
mesure des deux premières quantités utilise des métrologies courantes : comparateur pour les
déplacements ; dynamomètre, application directe de poids pour les efforts.
La mesure des déformations et des contraintes nécessite des techniques spécifiques selon qu’on
souhaite des résultats en un point de la structure (mesure locale) ou en tous les points à la fois (mesure
de champ). Très souvent des mesures locales sont suffisantes, on utilise alors classiquement des jauges
de déformation. Quand des mesures de champ sont nécessaires on peut faire appel à la
photoélasticimétrie (basée sur l’évolution des propriétés optiques de certains matériaux en fonction
de leur état de contrainte) ou encore à la technique de corrélation d’images (qui détecte les variations
d’un motif peint sur la structure quand on la charge).
On cherche ici à déterminer le tenseur des déformations en un point situé à 142mm du centre de
l’anneau. On va donc utiliser un matériel d’extensométrie électrique constitué de jauges de
déformation connectées à un module de lecture Vishay - système 2100.
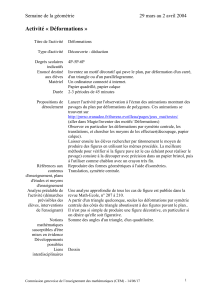
Constitution d’une jauge et principe de fonctionnement : Sous sa forme la plus simple, une jauge est
constituée par un fil très fin (20 à 30 μm de diamètre) collé sur un support (Cf. Figure 2). Il existe des
jauges de toutes les tailles et formes. Les plus petites, utilisées pour des mesures de déformation très
locales font quelques dixièmes de millimètres de long. D’autres plus grosses, utilisées pour des essais
sur le béton par exemple, font plusieurs centimètres de long. Bien que les déformations soient
théoriquement définies en un point, les jauges détectent des déformations moyennes sur une zone de
quelques mm2 au voisinage du point de mesure.
Figure 2 : Jauge de déformation (doc. Vishay)

La jauge est disposée de façon que la direction du fil soit parallèle à la direction dans laquelle on
souhaite mesurer l’allongement relatif. Le fil subit la même déformation que la surface sur laquelle il
est collé. Les variations de longueur et de résistance sont liées par :
(1)
K est une constante connue qui dépend du matériau constituant la jauge. On l’appelle facteur de jauge,
ici on a K = 2.
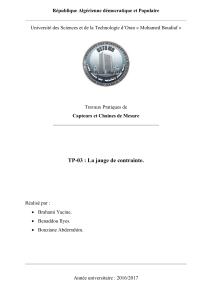
Principe des mesures : La variation relative de résistance du fil est évaluée grâce à la mesure d’une
variation de tension qui lui est proportionnelle. On utilise pour cela un montage électrique basé sur le
pont de Wheatstone (figure 3).
Le pont de Wheatstone est composé de 4 résistances R1, R2, R3 et R4. Ces résistances sont alimentées
par une tension U entre les points A et B.
(2)
Figure 3 : Pont de Wheatstone
Si R1R4 = R2R3 alors la tension entre les points C et D est nulle et le pont est dit équilibré.
Les variations R1, R2, R3 et R4 des résistances par rapport à leur valeur à l’équilibre font
apparaître une tension de déséquilibre V entre C et D qui vaut :
(3)
Certains termes de l’équation 3 peuvent être nuls suivant que l’on utilise 1, 2 ou 4 jauges actives dans
le pont. En faisant agir plusieurs jauges simultanément dans un même pont on peut ajouter ou
retrancher leurs déformations et réaliser des capteurs originaux (en éliminant par exemple les effets
de la traction dans une poutre sollicitée simultanément en traction et en flexion). Pour les mesures de
déformations ponctuelles, une seule jauge est active à la fois dans un pont (on parle de montage en
quart de pont). Dans ce cas, R1 est remplacée par la jauge de résistance R et des résistances étalonnées
identiques sont positionnées dans les autres branches afin d’équilibrer le pont. Lorsque R varie sous
l’effet des sollicitations mécaniques auxquelles est soumise la pièce, l’équation 3 devient :

(4)
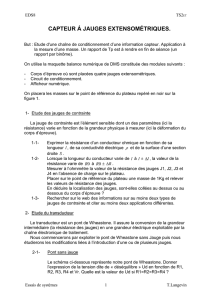
Pour effectuer des mesures simultanées, en un même point, dans différentes directions on utilise des
rosettes constituées de plusieurs jauges à 45°, 60°ou 120°les unes des autres. Dans ce qui suit, on
utilise une rosette à 45° (figure 4) et pour chaque jauge de la rosette un montage en quart de pont.
Figure 4 : Rosette à 45°(doc. Vishay)
b. Procédure de dépouillement des rosettes.
L’objectif est de connaître à partir des mesures réalisées sur chaque jauge l’intégralité du tenseur des
déformations au point de mesure M. Comme celui-ci est en surface de la pièce, le tenseur des
contraintes est tel que
, en notant
le vecteur normal au plan de mesure repéré
par (
,
). On est dans un état de contraintes planes.
1. Donner en tenant compte de cet état de contraintes, la forme du tenseur des contraintes.
2. Donner la forme du tenseur des déformations résultant, tout en la justifiant.
Soient ,
et les directions respectives des jauges. La valeur de l’allongement relatif dans la direction
est donnée par :
(5)
Des expressions analogues sont obtenues pour les directions
et . Ce qui fournit 3 équations où sont
connues , , et les directions des jauges. La résolution de ce système permet de déterminer
les inconnues , et . On peut en déduire les déformations principales par diagonalisation.
Les contraintes sont déduites des déformations grâce à la relation de comportement du matériau.
c. Manipulation.
Dans un premier temps, on s’intéresse au point situé à l’intersection d’un cercle de diamètre de
142mm et des rayons orientés à 45°et à 0°par rapport à la direction des efforts appliqués sur la pièce.
Concrètement, l’anneau contient une seule rosette. La forme de la structure étudiée (anneau) fait
qu’on peut le faire tourner et se mettre à des orientations différentes par rapport aux points, de liaison
avec le bâti (toujours le plus haut), et de chargement (toujours le plus bas). Pour chacun des trois
niveaux de chargement définis dans la partie 2 les déformations indiquées par les jauges ont été
relevées par un groupe d’étudiants. Les résultats obtenus sont :

Table 1 : Résultats relevés par les étudiants pour différents chargements et différents angles de positions de la rosette
Dans le tableau ci-avant, pour chaque cas de figure, trois prises différentes et indépendantes sont
effectuées.
1. Que pensez-vous de ces résultats, vis-à-vis notamment de la répétabilité ?
2. Si un problème a été constaté, saurez-vous imaginer les sources possibles qui l’ont généré ?
3. Vérifier la linéarité de la réponse de la structure sous différentes valeurs de chargement.
5. Dépouiller les résultats en évaluant les termes , et du tenseur des déformations
dans une base que vous préciserez.
4. Préparation pour une éventuelle simulation en Eléments Finis
Souvent en mécanique, des résolutions analytiques ne sont pas possibles. En effet la géométrie des
structures et la complexité des sollicitations fait que les problèmes deviennent très importants et
inadéquats pour une résolution analytique.
Une solution couramment utilisée aussi bien en académique qu’en industrie est d’utiliser la méthode
des Eléments Finis. Cette méthode est basée sur le principe machiavélique de « Diviser pour Reigner ».
La structure est subdivisée en un certain nombre de petits éléments et le problème est résolu petit
élément par petit élément. Le choix de ces éléments dépend à la fois de la géométrie de la structure
et des sollicitations à laquelle elle est soumise.
Une des rares limitations de cette méthode reste tout de même le temps de calcul qui par moments
peut dépasser les 30 jours sans interruption. Il est donc indispensable de ne lancer que le minimum
possible de calculs, en profitant notamment des symétries du problème.
1. Quelles sont les conditions à remplir par un problème mécanique pour pouvoir profiter des
conditions de symétrie.
2. Au vu du problème posé, expliciter la partie indispensable à discrétiser par la méthode des
Eléments Finis.
3. Pour cette partie de la structure identifiée, spécifier les conditions aux limites à imposer à la
fois en déplacements et en chargements.
1
/
5
100%