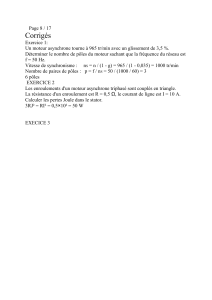
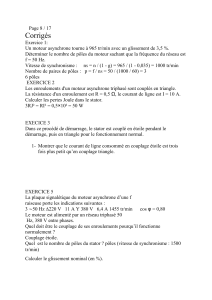
1
I.Description :
Le
moteur
asynchrone
est
constitué
de
deux
parties
distinctes
:
le
stator
et
le
rotor
.
I.1.
Stator
(partie
fixe
du
moteur)
I.1.1.
Présentation
Il
est
identique
à
celui
des
machines
synchrones,
c’est
à
dire
constitué
de
3
enroulements
formés
de
conducteurs
logés
dans
des
encoches.
Ces
enroulements
sont
parcourus
par
des
courants
triphasés,
d’où
la
création
d’un
champ
magnétique
tournant
à
la
fréquence
ns
=
f
/
p
et
à
la
vitesse
s
=
ω
/
p
I.1.2.
Couplage
sur
le
réseau
Sur
la
plaque
signalétique
d’un
moteur
asynchrone,
il
apparaît
une
indication
concernant
les
tensions
(ex
:
127
V
/
230
V).
Cela
signifie
que,
quelque
soit
le
réseau,
chaque
enroulement
doit
être
soumis,
au
régime
nominal,
à
la
tension
correspondant
à
la
valeur
indiquée
la
plus
faible
(ici
127V).
En
fonction
du
réseau,
il
faudra
donc
réaliser
le
couplage
adapté.
Exemple
:
Indication
sur
la
plaque
signalétique
:
230V
/
400V
Chaque
enroulement
doit
donc
être
soumis
à
230
V.
I.1.3.
Schéma
de
branchement
Les
moteurs
triphasés
possèdent
3
enroulements
qui
sont
reliés
à
6
bornes
repérées
U1,
V1,
W1
et
U2,
V2,
W2
;
le
positionnement
de
trois
barrettes
permet
d'alimenter
le
moteur
sous
deux
tensions
différentes
.
I.2.
Rotor
(partie
mobile
du
moteur)
Le
rotor
n'est
relié
à
aucune
alimentation.
Il
tourne
à
la
vitesse
de
rotation
n
.
Il
existe
2
possibilités
:
I.2.1.
Rotor
à
cage
d'écureuil
Il
porte
un
ensemble
de
barres
conductrices,
très
souvent
en
aluminium,
logées
dans
un
empilement
de
tôles.
Les
extrémités
des
barres
sont
réunies
par
deux
couronnes
conductrices.
Remarque
:
Le
rotor
en
cage
d’écureuil
présente
une
résistance
très
faible
:
on
dit
qu’il
est
court-circuité.
I.2.2.
Rotor
bobiné
Le
rotor
comporte
des
encoches
dans
lesquelles
sont
logés
des
conducteurs
formant
un
enroulement
triphasé.
Les
enroulements
sont
généralement
accessibles
par
l’intermédiaire
de
3
bagues
et
de
3
balais,
permettant
ainsi
de
modifier
les
caractéristiques
de
la
machine.
Remarque
:
Le
rotor
présente
des
résistances
non
négligeables,
d’où
l’apparition
de
pertes
par
effet
Joule
dans
le
rotor
P
jr
MOTEUR ASYNCHRONE TRIPHASE

2
g
=
I.3.
Fonctionnement
Le
stator
crée
au
niveau
de
l’entrefer
un
champ
magnétique
tournant
à
la
vitesse
s
=
/
p
(vitesse
de
synchronisme)
et
à
la
fréquence
ns
=
f/p.
Le
rotor,
soumis
à
ce
champ
tournant,
génère
des
courants
induits
qui,
conformément
à
la
loi
de
Lenz,
s’opposent
à
cette
rotation
en
entraînant
la
rotation
du
rotor
dans
le
même
sens,
à
la
vitesse
(à
la
fréquence
n
).
Remarque
:
En
charge,
cette
vitesse
est
toujours
légèrement
inférieure
à
s
.
II.
Glissement
ns
:
vitesse
de
rotation
de
synchronisme
du
soit
:
n
=
(
1
–
g
)
ns
ns
–
n
=
ns
Ω
s
–
Ω
Ω s
champ
tournant
(tr/s)
n
:
vitesse
de
rotation
du
rotor
(tr/s)
n
g
:
vitesse
de
glissement
(tr/s)
n
g
=
ns
–
n
n
=
0
g
=
1
n
=
ns
g
=
0
III.
Fréquence
des
courants
induits
Le
rotor
voit
un
champ
statorique
tournant
à
la
fréquence
de
glissement
n
g
=
g
ns
.
Soit
:
f
g
=
g
f
=
f
r
IV.
Bilan
des
puissances
-
Puissance
absorbée
:
P
=
√3U
I
cos
S
=
√3U
I
Q
=
√3U
I
sin
-
Puissance
transmise
au
rotor
:
Cette
puissance
est
transmise
au
rotor
par
le
couple
électromagnétique
P
tr
=
P
–
P
fs
-
P
js
=
C
e
Ωs
avec
C
e
:
moment
du
couple
électromagnétique
en
Nm.
Ωs
:
vitesse
angulaire
synchronisme
(
2.
.n
)
en
rad
/
s.
-
Puissance
sur
le
rotor:
P
r
=
P
tr
–
P
jr
=
C
e
Ω
C
e
:
moment
du
couple électromagnétique
en
Nm.
Pél = Pr Ω
:
vitesse
angulaire
rotor
(2.
.n)
en
rad/s.
-
Puissance
Utile
:
P
U
=
C
U
Ω
avec
P
U
=
P
- ΣPertes.
-
Pertes
Joule
Stator
:
Si
r
est
la
résistance
d’une
phase
du
stator
:
P
Js
=
3
rI
2
pour
le
couplage
étoile
P
Js
=
3
rj
2
pour
le
couplage
triangle
Si
R
est
la
résistance
entre
phases
du
stator
couplé
et
I
l’intensité
en
ligne
alors
:
P
js
=
(3/2)
RI
2
-
Pertes
Joule
Rotor
:
P
jr
=
g
P
tr
P
tr
:
puissance
transmise
au
rotor
g
:
glissement.
V.
Rendement
η
=
P
U
=
C
U
Ω
=
P
–
P
js
–
P
fs
–
P
jr
-
P
m
P
√3U
I
cos
P

3
VI.
Caractéristiques :
VI.1.
Fonctionnement
à
vide
A
vide
le
moteur
n'entraîne
pas
de
charge.
Conséquence
:
le
glissement
est
nul
est
le
moteur
tourne
à
la
vitesse
de
synchronisme.
A
vide:
g
=
0
et
donc
n
=
ns
et
la
puissance
absorbée
P
0
=
P
mec
+
P
fs
+
P
js0
VI.2.
Fonctionnement
en
charge
Le
moteur
est
maintenant
chargé,
c'est-à-dire
que
l’arbre
de
ce
dernier
entraîne
une
charge
résistante
qui
s’oppose
au
mouvement
du
rotor.
En
régime
permanent,
ou
régime
établi
:
C
u
=
C
r
VI.3.
Caractéristique
mécanique
C
U
=
f
(n)
Le
point
de
fonctionnement
se
trouve
sur
l’intersection
de
la
caractéristique
mécanique
du
moteur
et
de
la
courbe
qui
caractérise
le
couple
résistant
de
la
charge.
La
caractéristique
mécanique
du
moteur
dans
sa
partie
utile
est
un
segment
de
droite
.
Pour
la
tracer,
il
suffit
de
deux
points.
Le
premier
est
généralement
donné
par
l’étude
d’un
cas
précis,
le
second
se
déduit
de
l’essai
à
vide.
Dans
cet
essai,
le
couple
utile
est
nul,
il
est
associé
à
une
fréquence
de
rotation
considérée
comme
égale
à
la
fréquence
de
synchronisme.
C
u
(Nm)
Cu
1
0
n'
1
C
r
(Nm)
n
n'
(tr/s)
Le
point
de
fonctionnement
(
C
u1
;
n
1
)
permet
de
calculer
très
facilement
le
glissement
et
la
puissance
utile
dans
ce
cas
bien
précis.

4
VII.
RACCORDEMENT DES MOTEURS ASYNCHRONES AU RESEAU TRIPHASE
Couplage et modes de démarrages :
1-Introduction :
Lors de la mise sous tension d'un moteur asynchrone, celui-ci provoque un fort appel de courant qui peut
provoquer des chutes de tension importantes dans une installation électrique. Pour ces raisons en autres, il faut
parfois effectuer un démarrage différent du démarrage direct. Il est donc logique de limiter le courant pendant
le démarrage à une valeur acceptable. Mais si l'on limite le courant, on limite du fait la tension (dans certain
cas seulement).
2-Choix d’un démarreur :
Le choix d’un démarreur sera lié :
à la nature de la charge à entraîner
au type de moteur asynchrone
à la puissance de la machine
à la puissance de la ligne électrique
à la gamme de vitesse requise pour l’application.
3-Couplage TRIANGLE et ETOILE. :
Le moteur asynchrone triphasé dispose d’une plaque à bornes où sont disponibles les extrémités des
enroulements du stator :
On choisit le couplage étoile ou triangle en fonction des caractéristiques du moteur : La plaque signalétique
d’un moteur asynchrone précise toujours deux tensions de fonctionnement possibles :
Exemple : 230/400 ou 380/660
La plus petite valeur indiquée est la tension nominale d’un enroulement (une phase du moteur) . Par
conséquent le moteur asynchrone triphasé est branché :
En triangle : lorsque la tension entre phases (tension composée) du réseau d’alimentation est égale à la
tension de fonctionnement la plus basse :
Ex : moteur 380/660 Réseau : 220V / 380V (380 V = tension entre phases du réseau)
Symbole : Δ ou D.

5
En étoile : Lorsque la tension entre phases du réseau d’alimentation est égale à la tension de fonctionnement
la plus élevée :
Exemple moteur : 230/400 Réseau : 230 / 400
Autre exemple : Moteur dont la plaque signalétique indique : 230/400. Réseau triphasé : 132 / 230 .
Le couplage devra être TRIANGLE ( La tension entre phase du réseau = 230 V ce qui correspond à la tension
d’un enroulement (230V) du moteur)
4-Procédés de démarrage :
a- Démarrage direct :
Schéma :
Fonctionnement :
Une impulsion sur S2 alimente le relais (KM1) : les contacts KM1 se ferment et le relais est auto-alimenté.
Le moteur démarre. L’arrêt est obtenu par une impulsion sur S1.
Le démarrage est donc obtenu en un seul temps ; le stator du moteur est couplé directement sur le réseau.
Les avantages du démarrage direct :
- Simplicité de l’appareillage de commande
- Couple de démarrage important (1.5 à 2 fois le couple nominal )
- démarrage rapide (2 à 3 secondes)
Les inconvénients du démarrage direct :
PH
N
Id
C
d
MAS
3~
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%