Robotique: Manipulation et Commande - Université de Strasbourg
Telechargé par
lucrandriaoelison

Robotique
Manipulation et commande
Université de Strasbourg
Telecom Physique Strasbourg, option ISAV
Master IRIV, parcours AR
Jacques Gangloff

Plan du chapitre
! Conventions
! 1. Positionnement
◦ 1.1. Rotation
◦ 1.2. Décompositions de la rotation
◦ 1.3. Attitude
◦ 1.4. Matrice homogène
! 2. Cinématique
◦ 2.1. Vitesse d’un solide indéformable
◦ 2.2. Vecteur vitesse de rotation
◦ 2.3. Mouvement rigide
◦ 2.4. Torseur cinématique

Conventions
RiRep`ere num´ero i
PPoint
iPCoordonn´ees de Pdans le rep`ere i
�vou vVecteur
ivCoordonn´ees de �vdans le rep`ere i
−−→
OP ou OP Vecteur
i(OP ) Coordonn´ees de −−→
OP dans le rep`ere i
�u�vProduit vectoriel
�u·�vProduit scalaire
0R01 ou R01 Rotation du rep`ere 0 vers le rep`ere 1 exprim´ee dans 0∗
0M01 ou M01 Matrice homog`ene du rep`ere 0 vers le rep`ere 1 exprim´ee dans 0∗
∗Si le nombre de rep`eres d´epasse 10, mettre un espace entre les 2 num´eros
comme dans M12 13.

1. Positionnement
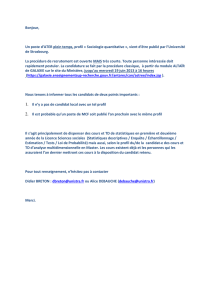
1.1. Rotations : le cas 2D
! Représentation de la rotation :
1
x
1
y
0
x
0
y
sin
!
cos
!
!sin
"
cos
!
!
0
R
1
R
1
x
1
y
R01 =cos
!
"sin
!
sin
!
cos
!
#
$
%&
'
(
0
1
x
0
1
y

1. Positionnement
1.1. Rotations : le cas 2D
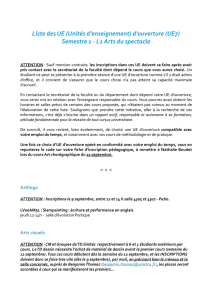
! Propriétés :
! Ce type de matrice 2x2 appartient au
groupe spécial orthogonal d’ordre 2 noté
SO(2)
R01 =cos
!
"sin
!
sin
!
cos
!
#
$
%&
'
()detR01
{ }
=cos2
!
+sin2
!
=1
)R"1
01 =cos
!
sin
!
"sin
!
cos
!
#
$
%&
'
(=RT
01 =R
10
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
1
/
44
100%