Les circuits de puissance électriques - 1
AUTOMATIQUE BTS MI
LES CIRCUITS DE PUISSANCE ELECTRIQUES
I – PRINCIPAUX ACTIONNEURS ELECTRIQUES :
En fonction de la nature de l’énergie issue de la conversion effectuée par l’actionneur, on distingue différents types
d’actionneurs électriques. Ces actionneurs convertissent une énergie électrique en :
Energie mécanique de rotation : moteurs rotatifs
Energie mécanique de translation : moteurs linéaires, électro-aimants
Energie thermique : résistances de chauffage, électrodes
Energie radiante : lampe à décharge
Dans le domaine des systèmes automatisés de production, les moteurs rotatifs sont le plus fréquemment utilisés. Ces
moteurs sont diversifiés et on peut citer :
Les moteurs à courant continu
Les moteurs asynchrones
Les moteurs synchrones ou auto-synchrones
Les moteurs à courant impulsionnel ou moteurs pas à pas
Leur vitesse de rotation peut être fixe ou variable selon les besoins. Dans ce dernier cas, le moteur est associé à un
dispositif de modulation d’énergie.
II – PRINCIPES GENERAUX SUR LES MOTEURS ROTATIFS :
21 – Principe de fonctionnement :
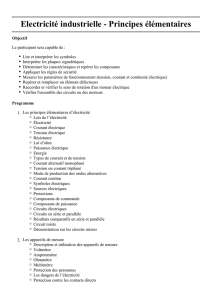
Un moteur électrique rotatif fonctionne du fait de l’existence de 2 champs
magnétiques :
Le champ statorique Bs, lié à la partie tournante du moteur
Le champ rotorique Br, lié à la partie fixe du moteur
Si les 2 champs sont décalés d’un angle « », il apparaît alors un couple (ou
un effort) qui tend à les aligner. Le couple est maximum lorsque les 2 champs
sont perpendiculaires ( = /2).
Pour créer un moteur, il suffit, par un procédé technique, de faire tourner (ou
de déplacer) un de ces 2 champs par rapport à l’autre pour que l’autre suive,
entraînant ainsi le mouvement relatif du rotor par rapport au stator.
22 – Caractéristiques principales :
Les caractéristiques importantes d’un moteur sont :
Le couple disponible en bout d’arbre
La fréquence de rotation de l’arbre donc du rotor
L’intensité du courant consommé
Bs
Br
C
Afin de comparer des types de moteurs différents et de déterminer le point de fonctionnement d’un ensemble
mécanique entraîné par un moteur, il est nécessaire de connaître la courbe du couple en fonction de la fréquence de
rotation : c’est la caractéristique du moteur.
Afin de déterminer les conditions électriques de branchement, de commande et de protection d’un moteur, il est
nécessaire de connaître aussi les caractéristiques électriques de ce moteur : ce sont les courbes de courant en fonction
de la vitesse ou du couple.
III – CHOIX D’UN MOTEUR ELECTRIQUE :
Une seule vitesse : les moteurs à courant alternatif sont les plus adaptés. Ils seront asynchrones si la précision de
la vitesse n’est pas critique (3% à 8%), synchrones dans le cas contraire. Les vitesses étant standardisées (3000,
1500, 100, 750 tr/min), un réducteur mécanique peut être nécessaire.
Deux ou trois vitesses fixes : les mêmes moteurs peuvent être utilisés par permutation des enroulements.
Vitesse variable : le moteur à courant continu à excitation séparée est le plus utilisé. Toutefois, les progrès des
commandes électroniques pour les moteurs à courant alternatif rendent leurs utilisations de plus en plus intéressantes
économiquement dans la plupart des cas courants.
Vitesse asservie : le moteur à courant continu à aimant permanent est le plus adapté pour des puissances
inférieures à 10 kW. Les moteurs synchrones sans balais sont aussi utilisables, avec l’avantage d’une absence de
limite de vitesse due à la commutation électronique.

Les circuits de puissance électriques - 2
AUTOMATIQUE BTS MI
LES CIRCUITS DE PUISSANCE ELECTRIQUES
Position asservie : les moteurs à courant continu ou auto-synchrones pilotés sont utilisables dans tous les cas.
Les moteurs pas à pas peuvent être utilisés lorsque la puissance nécessaire et les inerties entraînées sont faibles
(inertie ramenée à l’arbre moteur de l’ordre de celle du rotor). Il convient toutefois de vérifier que la précision nécessaire
est compatible avec le nombre de pas du moteur.
Vitesse élevée (> 3000 tr/min) : les moteurs à courant continu et pas à pas ne sont pas adaptés : les premiers
en raison de la limitation due à la commutation mécanique par balais. Il existe toutefois des moteurs à courant continu
sans balais moins limités en vitesse.
En règle générale, exception faite pour les vitesses fixes, on ne choisit pas seulement un moteur mais un ensemble
moteur et commande électronique. Les performances de l’installation dépendent autant du moteur que de sa
commande.
IV – MOTORISATION ELECTRIQUE DES SYSTEMES :
L’énergie électrique est disponible soit sous forme de courant alternatif sur des installations fixes alimentées par le
réseau de distribution, soit sous forme de courant continu pour des équipements le plus souvent mobiles ou
autonomes.
L’énergie électrique continue est fournie par des batteries ou des piles, mais la quantité d’énergie stockée est
relativement limitée. Toutefois, pour des consommations importantes, le réseau alternatif alimente des récepteurs
continus en transformant le courant alternatif en courant continu à l’aide de montages redresseurs.
Les systèmes sont équipés de moteurs électriques (continus ou alternatifs) adaptés à la forme de l’énergie utilisée.
Le moteur le plus usité en milieu industriel est le moteur asynchrone triphasé (machines outils, broyeurs, concasseurs,
bandes transporteuses, convoyeurs, ponts roulants, pompes, ventilateurs, compresseurs, etc.)
V – STRUCTURE FONCTIONNELLE D’UNE CHAINE DE CONVERSION D’ENERGIE
ELECTRIQUE :
Les moteurs électriques convertissent l’énergie électrique (essentiellement caractérisée par un
courant et une tension) en une énergie mécanique (caractérisée par un couple et une fréquence de
rotation). De ce fait, les moteurs appartiennent à la famille des actionneurs dont la fonction est
toujours de convertir l’énergie dans le but de l’adapter aux besoins de la PO.
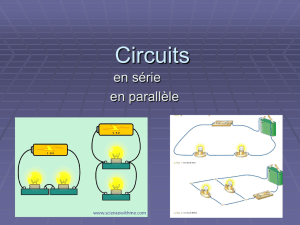
Quel que soit l’actionneur électrique utilisé, il est toujours nécessaire d’avoir :
Une source d’énergie adaptée dont on peut disposer en toute sécurité
Un préactionneur permettant de commuter ou de moduler l’énergie à partir d’un ordre issu de la PC
Un ensemble de dispositifs de protection de l’actionneur
L’actionneur proprement dit pour exerce l’action souhaitée sur l’effecteur
ISOLER DU
RESEAU COMMUTER
MODULER
PROTEGER
CONTRE LES
SURCHARGES
CONVERTIR
L'ENERGIE
PROTEGER
CONTRE LES
COURTS
CIRCUITS
Fonction
sectionnement
Fonction
protection
contre CC Préactionneur Fonction
protection
contre
surcharges
Actionneur
électrique
Energie,
électrique Energie,
électrique Energie,
Utilisable Energie,
Utilisable
Energie
mécanique de
rotation
Energie,
électrique du
réseau
Sectionneur
Disjoncteur
Fusibles
Disjoncteur
magnétique
Contacteur
Variateur
Gradateur Relais thermique
Disjoncteur
magnéto-
thermique
Moteurs :
pas à pas
Asynchrones
A courant continu
Autosynchrones

Les circuits de puissance électriques - 3
AUTOMATIQUE BTS MI
LES CIRCUITS DE PUISSANCE ELECTRIQUES
VI – MOTORISATION DES PARTIES OPERATIVES :
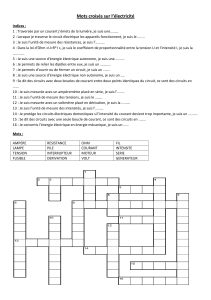
61 – Chaîne :
DEMARREUR
VARIATEUR
Consignes
Mesures
Limites
Energie
électrique MOTEUR
MRéducteur
K
Charge
Arbre
moteur
Pa
m
Pm
Tm
m
Jm
Pr
Tr
m
K=r/m
Tr
r
Jr
rJc
Souvent, Jm et Jr sont négligeables devant Jc.
62 – Conventions :
Pa : Puissance absorbée par le moteur en watts
Moteur :
m : rendement du moteur
Pm : puissance utile sur l’arbre
moteur en watts
Tm : couple moteur en N/m
m : fréquence de rotation de
l’arbre moteur en rad/s
Jm : moment d’inertie du moteur
en kg/m²
Réducteur :
r : rendement du moteur
Pr: puissance absorbée par la
charge ramenée sur l’arbre moteur
en watts
Tr : couple résistant ramené sur
l’arbre moteur en N/m
r : fréquence de rotation de la
charge en rad/s
Jr : moment d’inertie du réducteur
en kg/m²
Charge :
Jc : moment d’inertie de la charge
ramené sur l’arbre moteur en
kg/m²
Pa = Pm
m
Pm = Tm.m
Pr = Tr.m
K = r
m
= 2n
60
La machine entraînée (la charge) possède des caractéristiques mécaniques : frottements, déplacements, vitesse,
accélération, travail, etc.
Le choix d’un moteur et de son variateur (démarreur) dépend donc essentiellement du type de
charge : couple, vitesse, accélération, cycle de fonctionnement.

Les circuits de puissance électriques - 4
AUTOMATIQUE BTS MI
LES CIRCUITS DE PUISSANCE ELECTRIQUES
VII – ETUDE MECANIQUE :
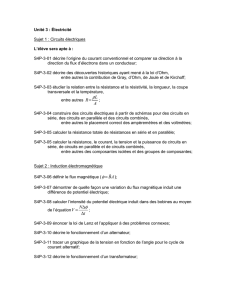
71 – Etude du couple résistant :
La caractéristique du couple résistant en fonction de la vitesse Tr = f() définit les besoins de la machine entraînée.
Lorsque cette caractéristique n’est pas parfaitement connue, elle est assimilée à l’une des 3 courbes suivantes.

Les circuits de puissance électriques - 5
AUTOMATIQUE BTS MI
LES CIRCUITS DE PUISSANCE ELECTRIQUES
72 – Moment d’inertie :
L’inertie caractérise les masses en mouvement : c’est un paramètre dynamique. C’est par son inertie qu’un système
s’oppose au changement de vitesse que l’on veut lui imposer. La grandeur physique associée à l’inertie est le moment
d’inertie J exprimé en kg/m².
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
1
/
120
100%