TP Assembleur 8086: Exploration Emu8086 et Premier Programme
Telechargé par
hàppy Ñàsìñà

L2 ACAD
2019-2020
1
TP N°2 : Exploration de l’environnement de l’Emu8086 et premier
programme en langage Assembleur
La programmation en assembleur 8086 nécessite un environnement adéquat, nous avons
choisi d’utiliser l’Emu8086. C’est un logiciel qui simule le processeur 8086.
Vous allez constater tout au long de ces TPs que l’émulateur nous fournit un environnement
avancé pour l’apprentissage des mécanismes et du fonctionnement du processeur i8086. Par
exemple, il nous permet d’exécuter un programme instruction par instruction tout en suivant
l’évolution du contenu des registres, du segment de données, la pile, etc. Ceci va vous
permettre de mettre en pratique toutes les connaissances vues en cours.
1. Lancement et découverte de l’émulateur.
Pour lancer l’émulateur, il faut lancer l’application emu8086 se trouvant dans le sous
répertoire /binaires ou à partir d’un raccourci créé sur le bureau.
Notre émulateur se présente pour l’instant comme un éditeur de texte classique, avec le
support d’une colorisation syntaxique du code assembleur (mode éditeur).
1- Copier puis extraite l’archive Emu8086 dans un répertoire de travail.
2- Observer le contenu des sous répertoires /documentation, et /binaires/examples.
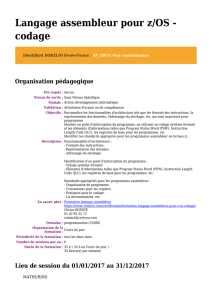
3- Explorer les différentes fonctionnalités New, Open, Examples, Save,
Convertor, Calculator, Help.
new.
Contient toute la documentation et les tutos
concernant l’ému8086, à partir d’un manuel e
son utilisation jusqu’à l’ensemble des
instructions qu’il supporte ainsi que les
fonctions d’interruptions en formats html
Contient des exemples de programmes écrits
en langage assembleur que vous pouvez tester
et exécuter
Contient les fichiers générés après compilation
d’un programme .asm
Contient vos programmes
d’extention .asm
Commencer à créer un
nouveau fichier ‘’.COM’’
Mme S.BOUCHENE

L2 ACAD
2019-2020
2
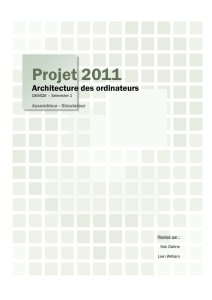
open, examples et save.
calculator et convertor.
ascii codes
Permet d’enregistrer le
programme écrit en
langage assembleur sous
l’extension ‘’.asm’’
Vous allez trouver ici tous
les exemples de
programmes assembleurs
du répertoire /examples
décris en haut
C’est pour ouvrir un fichier
.asm existant
Convertir des valeurs 8 bits
ou 16 bits d’un type de
codage vers un autre
codage, il suffit d’écrire la
valeur sur la base initiale
souhaitée
Une calculatrice qui
réalise des opérations
et affiche le résultat
en base souhaitée.
Table des caractères avec
leurs codes ascii en
décimal et en
hexadécimal, il suffit de
cliquer à l’intérieur de la
fenêtre pour changer la
base

L2 ACAD
2019-2020
3
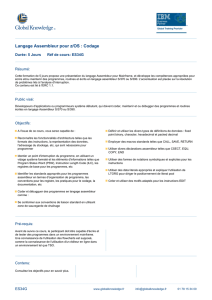
help. Dans la documentation on s’intéresse particulièrement aux onglets : 8086
Instruction Set et Interrupts.
Instruction Set. Contient les instructions supportées par l’ému8086,. Pour
savoir que fait une instruction donnée, il suffit de cliquer dessus pour avoir la
description de l’instruction, ses paramètres et un exemple.
Ça ouvre une page HTML
contenant la
documentation sur
l’ému8086 qu’on trouve
aussi dans le répertoire
/documentation

L2 ACAD
2019-2020
4
Interrupts. Nous allons étudier cette année quelques fonctions d’interruptions.
Pour avoir le détaille d’une interruption, il suffit de cliquer dessus.
2. Compilation et exécution d’un code assembleur.
Pour cette partie, nous allons utiliser les exemples déjà disponibles dans l’émulateur.
1- Compilez le code de l’exemple 2 add/subtract. Prenez note des messages de
compilation, ainsi que des fichiers générés (après enregistrement dans un
emplacement bien choisi).
L’exemple add/ subtract, initialise au début les resgitres al et bl par les valeurs 5 et 10, ensuite
il ajoute le contenu de al à bl, par la suite il soustrait de bl la valeur 1, à la fin, une portion de
code pour l’affichage du contenu de bl sur écran en binaire qu’on aura l’occasion d’expliquer
dans les prochains TPs.
L’exemple choisit

L2 ACAD
2019-2020
5
En cliquant sur compile, une fenêtre s’ouvre pour enregistrer les fichiers générées après
compilation dans le répertoire /MyBuild du dossier emu8086.
Une fois enregistré, la fenêtre si dessous sera affichée, qui donne la taille du programme en
nombre d’octet qui est le même sur toutes les machines (38 bytes), et le temps pris pour la
compilation, ce dernier diffère d’une machine à une autre.
Une fois terminé, cliquez sur close.
2- Lancez l’émulation de votre programme (Emulate). Qu’est ce que vous constatez ?
-Deux fenêtres qui vont s’afficher :
Une qui contient le programme exemple (code source) avec une bande jaune sur la
première instruction, cette bande va descendre après chaque exécution pas à pas.
La Deuxième fenêtre « Emulator » contient 4 zones que nous décrivons ci-dessous :
La première zone.
 6
7
8
9
6
7
8
9
1
/
9
100%