Electronique de Puissance: Redresseurs - Cours Génie Electrique
Telechargé par
Abdallah Barkami

1
Département
Génie Electrique
Module M12
ELECTRONIQUE DE PUISSANCE
POLYCOPIE
(partie introduction-redresseurs)
Elaboré par
Mme K. SENHAJI RHAZI
Professeur Assistant
Ecole Supérieure de Technologie Casablanca

2
INTRODUCTION
1. Généralités sur la conversion de l’énergie électrique :
L'électronique de puissance, que l'on devrait d'ailleurs nommer « électronique de
conversion d'énergie » a moins de 50 ans. Elle a connu un tel essor qu'aujourd'hui
près de 15 % de l'énergie électrique produite est convertie sous une forme ou une
autre.
L’électronique de puissance trouve une place de choix dans de nombreux secteurs
de l’activité industrielle à savoir :
- la traction électrique
- les machines-outils
- la robotique
- les techniques spatiales
- la marine …
Pour des raisons économiques, l’énergie est fournie par des réseaux triphasés
équilibrés de fréquence 50 Hz. L’utilisateur utilise souvent l’énergie en continu ou à
des fréquences différentes de celle du réseau. Au cours de ces années la taille, le
poids et le coût des convertisseurs n'ont fait que diminuer, en grande partie grâce
aux progrès faits dans le domaine des interrupteurs électroniques (diodes, thyristors,
triacs, transistors …).
C'est une électronique de commutation : elle tire parti du fait qu'un interrupteur parfait
fermé (résistance nulle, tension aux bornes nulle) ou ouvert (résistance infinie,
courant traversant nul) ne dissipe aucune énergie, donc ne présente aucune perte.
Cela justifie l'essor de ce type d'électronique dans les systèmes à haute puissance
puisque les pertes raisonnables permettent une évacuation de la chaleur générée
sans recourir à des moyens extrêmes et coûteux. Mais au fil du temps l'électronique
de puissance s'est imposée dans tous les domaines où les pertes doivent rester
faibles pour limiter l'échauffement comme dans les ordinateurs, et où le rendement
doit être élevé pour préserver la source d'énergie comme dans les systèmes
alimentés par batteries (GSM, GPS, ordinateurs portables ...).
Les convertisseurs statiques sont les dispositifs à composants électroniques
capables de modifier la tension et/ou la fréquence de l’onde électrique.
On distingue deux types de sources de tension :
- sources de tension continues caractérisées par la valeur U de la tension
- sources de tension alternatives définies par les valeurs de la tension efficace
V et de la fréquence f
On différencie quatre types de convertisseurs :
- convertisseur alternatif-continu : redresseur
- convertisseur continu-alternatif : onduleur
- convertisseur alternatif-alternatif : gradateur si la fréquence reste fixe
- convertisseur continu-continu : hacheur

3
2. les composants actifs utilisés dans les convertisseurs statiques
L’électronique de puissance s’est progressivement imposée comme le moyen
privilégié de maîtriser l’énergie électrique. Cette situation résulte de progrès continus
concernant autant les concepts que la technologie. La période des années 80-95 a
été l’âge d’or des innovations topologiques des structures de convertisseurs
statiques de manière à tirer le meilleur parti possible des propriétés d’un semi-
conducteur donné.
Les briques élémentaires qui rentrent dans la constitution d’un convertisseur statique
sont :
- les composants actifs
- les composants passifs : inductances, transformateurs, câblages,
condensateurs…
- les refroidisseurs
- les filtres
Lorsqu’il conçoit un « convertisseur statique », les préoccupations du concepteur
sont toujours les mêmes :
- choix de la structure
- calcul et évacuation des pertes
- détermination des éléments parasites qui nous éloignent du fonctionnement
idéal supposant les divers constituants parasites
- respect des normes, CEM surtout
- contraintes volumiques
- et parfois contraintes mécaniques
Les éléments utilisés sont des dispositifs statiques à semi-conducteurs. Ils se
différencient par la « fonction interrupteur » qu’ils remplissent, selon les critères
suivants :

4
- leur caractéristique statique V(I)
- la possibilité ou non de commander leur blocage ou leur amorçage (caractéristique
dynamique)
Il y a 4 catégories d’interrupteurs :
- amorçage et blocage commandés (transistor, GTO, MOS)
- amorçage et blocage spontanés (diode)
- amorçage commandé, blocage spontané (thyristor)
- blocage commandé, amorçage spontané (thyristor dual)
1. DIODE
Une diode est une jonction PN de semi-conducteurs, c’est un interrupteur passif
polarisé. Le sens de branchement de la diode a une importance sur le branchement
du montage.
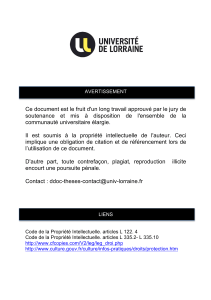
1.1. Caractéristique statique
Les conditions d’amorçage sont :
VAK>0 : fermeture
Les conditions de blocage sont :
iAK = 0 ; VAK<0 : ouverture
I
Ud
Courant inverse
Courant direct
anode cathode

5
1.2. Caractéristique dynamique
Elle concerne le passage de l’état passant à l’état bloqué et inversement. Le
phénomène le plus important est le blocage car le temps d’amorçage est beaucoup
plus faible que le temps de blocage.
Le blocage d’une diode est caractérisé par l’annulation du courant direct puis
l’apparition d’une tension inverse à ses bornes.
Ce temps de blocage, généralement de quelques μs peut descendre jusqu’à 100 ns
avec certaines diodes dites rapides.
2. LE THYRISTOR
C’est un semi-conducteur commandable à l’amorçage et spontané au blocage.
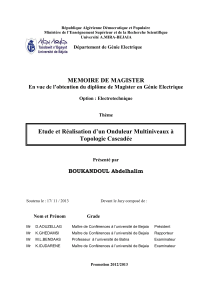
2.1. Caractéristique statique
On observe 2 types de fonctionnement :
à courant de gâchette nul, le thyristor reste bloqué lorsque la tension appliquée
évolue entre VRM et VDM
val max inv val max dir
anode cathode
gâchette
VAK
I
V
iG
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%