BTS CSE : Commande d'un Poste de Chargement Automatisé
Telechargé par
Stephane Delaportas

BTS ET
COMMANDE DES SYSTEMES ENERGETIQUES
DM
TD1-Commande_systemes Lycée La fayette - Champagne/Seine 5/6
DM_2. Poste de chargement
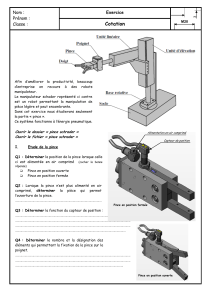
2.1. Synoptique du poste de chargement
Actionneurs :
MP : Moteur pince
MT : Moteur treuil
MC : Moteur chariot
Pré-actionneurs :
KM1 : Déplacer la pince à droite
KM2 : Déplacer la pince à gauche
KM3 : Descendre le treuil
KM4 : Monter le treuil
KM5 : Déplacer le chariot à droite
KM6 : Déplacer le chariot à gauche
Capteurs :
p : Présence pièce
pp : Présence pièce dans la pince
pg : Pince à gauche
pd : Pince à droite
ph : Pince en haut
pc1 et pc2 : Pièce chargée correctement
cg : Chariot à gauche
cd : Chariot à droite
Dialogue :
Ma : Bouton poussoir de marche
Ar : Bouton poussoir d’arrêt (NC)
H : Voyant cycle en cours

Tale STI2D COMMANDE DES SYSTEMES ENERGETIQUES TD
TD1-Commande_systemes Lycée La fayette - Champagne/Seine 6/6
2.2. Fonctionnement
Conditions initiales : pince en haut et à gauche, chariot à gauche, présence pièce.
Suite à une impulsion sur le bouton poussoir de marche, le cycle suivant s’effectue :
La pince descend chercher un bloc (mécanisme d’accrochage automatique).
Une fois qu’une pièce est présente dans la pince, elle remonte.
Arrivée à droite elle redescend pour déposer le bloc.
Si le chariot n’est pas correctement chargé, la pince remonte au bout de 3 secondes puis
redescend.
Une fois chargé, le chariot se déplace vers la droite et dans le même temps, la pince reprend sa
position initiale.
Arrivé en fin de course, l’opérateur a 30 secondes pour décharger le chariot manuellement, puis
ce dernier revient à gauche.
Le cycle reprend tant que l’arrêt n’a pas été demandé.
Le voyant H est alimenté pendant tout le cycle.
2.3. Travail demandé
Q1. Etablir le GRAFCET point de vue « partie commande ».
1
/
2
100%