École des Hautes Études Industrielles -Département Automatique
Cours de régulation industrielle
CHAPITRE 8
Correction des Systèmes

École des Hautes Études Industrielles -Département Automatique
Cours de régulation industrielle
Correction des Systèmes
Introduction :
Nous avons vu comment quantifier le comportement
d’un système et ce dernier chapitre va permettre de
régler au mieux le processus.
L’amélioration des performances d’un système sont :
Un meilleur temps de montée,
Modifier l’amplitude du premier dépassement,
Minimiser, voir annuler l’erreur statique,
Avoir une meilleure stabilité en modifiant les marges de gain et
de phase,
…

École des Hautes Études Industrielles -Département Automatique
Cours de régulation industrielle
Correction des Systèmes
Introduction :
Un processus àcommander possède ses propres
caractéristiques qui ne peuvent être modifiées.L’étude
àsuivre est alors la suivante :
Trouver un modèle pour le système,
Identifier les paramètres du modèle,
Calcul des erreurs,
Étude de la stabilité.
Néanmoins, la régulation des systèmes passent par la
recherche du compromis : stabilité–rapidité–précision.

École des Hautes Études Industrielles -Département Automatique
Cours de régulation industrielle
Correction des Systèmes
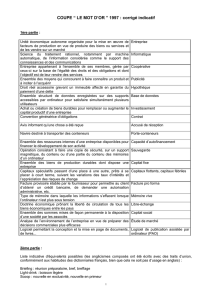
Structure des correcteurs :
Correcteur Série ou en Cascade :
eS(p)
E(p)
-
+
)(pG
)(pR
Correcteur Parallèle :
eS(p)
E(p)
-
+
)(pG
)(pR

École des Hautes Études Industrielles -Département Automatique
Cours de régulation industrielle
Correction des Systèmes
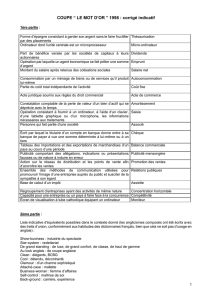
Structure des correcteurs :
Correcteur par Anticipation :
S(p)
E(p)
-
+
)(pG
-
+
)(
1pR
)(
2pR
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%