ARTICLE
TECHNIQUES DE L’INGÉNIEUR
L’expertise technique et scientifique de référence
Techniques
de l'Ingénieur
p2645
Spectrométrie de masse - Principe
et appareillage
Date de publication : 12/09/2014
Par :
Cet article fait partie de la base documentaire :
Mesures - Analyses
Dans le pack : Mesures - Analyses
et dans l’univers : Technolgies de l’information
Document délivré le : 23/06/2014
Pour le compte : 7200100403 - techniques ingenieur // marie LESAVRE //
217.109.84.129
Pour toute question :
Service Relation clientèle - Techniques de l’Ingénieur
249 rue de Crimée - 75019 - Paris
par mail [email protected] ou au téléphone 00 33 (0) 1 53 35 20 20
Copyright © 2014 | Techniques de l’Ingénieur | tous droits réservés
Guy BOUCHOUX
Professeur à l’université Paris XI (Orsay), École Polytechnique, DCMR, Palaiseau
Michel SABLIER
Chargé de recherches au CNRS, École Polytechnique, DCMR, Palaiseau
Guy BOUCHOUX
Professeur à l’université Paris XI (Orsay), École Polytechnique, DCMR, Palaiseau
Michel SABLIER
Chargé de recherches au CNRS, École Polytechnique, DCMR, Palaiseau
Cet article peut être traduit dans la langue de votre choix.
Accédez au service Traduction à la demande dans votre espace « Mon compte ». (Service sur devis)
d3620
Machines asynchrones - Alimentation et
caractéristiques
10/08/2004
Bernard DE FORNEL
Ingénieur de l'École nationale supérieure d'électrotechnique, d'électronique, d'informatique et
d'hydraulique de Toulouse (ENSEEIHT), Professeur des universités, Institut national
polytechnique (INP) de Toulouse
Machines électriques tournantes : conception, construction et commande
Convertisseurs et machines électriques
Énergies
08/08/2014
7200045062 - universite de toulouse // 130.120.56.230
Copyright © 2014 Techniques de l'Ingénieur

Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur
D 3 620
−
1
D 3 620
8 - 2004
Machines asynchrones
Alimentation et caractéristiques
par
Bernard de FORNEL
Ingénieur de l’École nationale supérieure d’électrotechnique, d’électronique,
d’informatique et d’hydraulique de Toulouse (ENSEEIHT)
Professeur des universités, Institut national polytechnique (INP) de Toulouse
e moteur asynchrone, dit parfois d’induction, est utilisé depuis de très nom-
breuses années pour assurer la variation de vitesse non seulement de pro-
cessus industriels, mais aussi de chaînes de traction pour les transports
(ferroviaires et véhicules électriques), également de systèmes domotiques...
Pour des applications de faible puissance et pour des domaines restreints de
variation de vitesse, on peut agir sur cette dernière par
variation de l’amplitude
de la tension statorique à l’aide de gradateurs
. La récupération rotorique permet
la variation de vitesse pour des machines de grande puissance (machine asyn-
chrone associée à des éoliennes), sur des plages réduites de vitesse. Actuelle-
ment, la majorité des variateurs de vitesse utilise des alimentations à fréquence
et amplitude variables sur le stator de la machine asynchrone. Le domaine de
vitesse est beaucoup plus étendu et les performances dynamiques plus élevées.
La machine asynchrone présente l’avantage d’être robuste, de construction sim-
ple et peu coûteuse, surtout si le rotor est à cage d’écureuil. Cependant, son
contrôle est plus complexe que celui de la machine à courant continu ou de la
machine synchrone. Dans la mesure où l’alimentation a lieu par une seule arma-
ture, le découplage entre les deux variables principales de cette machine, à
savoir le flux magnétique et le couple électromagnétique, est difficile à réaliser
(voir l’article suivant [D 3 621] sur la commande des machines asynchrones).
Après une brève présentation des variateurs asynchrones à fréquence statori-
que constante (gradateur et cascade hyposynchrone), on considère l’étude des
comportements en régime statique et dynamique de la machine asynchrone, ali-
mentée à fréquence variable, selon plusieurs préoccupations :
—
en régime statique
, on étudie successivement les formes d’onde des
signaux électriques et mécaniques (courants, tensions et couple) pour différents
modes d’alimentation, les caractéristiques électromécaniques en régime perma-
nent sinusoïdal à amplitude et fréquence variables pour différents choix de fonc-
tionnements et de variables d’entrée ;
—
en régime dynamique
, on s’intéresse à une modélisation autour d’un point
de fonctionnement en raison de la non-linéarité des modèles. On s’intéresse au
positionnement des pôles et des zéros en vue de définir les conditions de stabi-
lité et de réponse non minimale de phase.
1. Variation de vitesse à fréquence d’alimentation fixe
.................... D 3 620 – 2
1.1 Variation de tension : gradateur................................................................. — 2
1.2 Récupération rotorique : cascade hyposynchrone ................................... — 5
2. Alimentation à fréquence variable
...................................................... — 8
2.1 Formes d’onde............................................................................................. — 8
2.2 Caractéristiques électromécaniques en régime permanent sinusoïdal
à fréquence et amplitude variables............................................................ —12
3. Régimes transitoires. Stabilité
............................................................. —14
3.1 Alimentation par des tensions.................................................................... — 15
3.2 Alimentation par des courants................................................................... — 18
3.3 Conclusion.................................................................................................... — 19
Pour en savoir plus
........................................................................................... Doc. D 3 620
L
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230tiwekacontentpdf_d3620

MACHINES ASYNCHRONES ______________________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 3 620
−
2
© Techniques de l’Ingénieur
Notations et symboles
Symbole Unité Désignation
A
,
a
,
b
,
c
Constantes
C
em
N · m Couple électromagnétique
C
n
N · m Couple nominal
C
r
N · m Couple de charge, couple
résistant
E
V Tension d’alimentation
constante
f
N · m · rad
−
1
· s Coefficient de frottement
visqueux
f
r
,
f
s
Hz Fréquence rotorique,
statorique
g
Glissement
G
1
,
G
2
Fonctions de transfert
H
m
3
/s Débit d’une pompe
i
A Courant
i
s
A Courant statorique
I
d
A Valeur moyenne du courant
dans le circuit continu
I
r
A Valeur efficace du courant par
phase au rotor
J
N · m · rad
−
1
· s
2
Moment d’inertie total des
parties tournantes
k
1
,
k
2
,
k
3
, K
Constantes
, H Inductance de fuites totales par
phase du rotor, du stator
L
H Inductance
L
r
,
L
s
H Inductance propre du rotor, du
stator
m
Rapport de transformation du
rotor
M
sr
H Inductance mutuelle cyclique
stator/rotor
N
tr/s Vitesse de rotation du rotor
N
s
tr/s Vitesse de rotation du champ
tournant, vitesse de
synchronisme
rs
p
Pa Pression
p
Opérateur de Laplace
p
1, 2, 3, 4
s
−
1
Pôles des fonctions de transfert
P
Nombre de paires de pôles
P
a
W Puissance transmise au rotor et
fournie au stator
P
d
W Puissance fictive de
dimensionnement
P
m
W Puissance mécanique
R
Ω
Résistance totale équivalente à
tout le circuit rotorique
R
r
,
R
s
Ω
Résistance par phase du rotor,
du stator
t
s Temps
T
s
s Période
U
d
V Tension moyenne à la sortie du
redresseur
V
r
,
V
s
V Valeur efficace de la tension par
phase au rotor, au stator
v
s
V Tension statorique
Y
Rapport des pertes totales sur
les pertes dues au fondamental
Z
Index de modulation
α
rad Angle d’amorçage des
thyristors
ϕ
rad Angle
Φ
r
,
Φ
s
Wb Flux rotorique, statorique
σ
Coefficient de dispersion
ω
r
,
ω
s
rad/s Pulsation rotorique, statorique
Ω
rad/s Vitesse angulaire de rotation
Ω
s
rad/s Vitesse angulaire de rotation du
champ magnétique
Notations et symboles
Symbole Unité Désignation
1. Variation de vitesse
à fréquence d’alimentation
fixe
Deux possibilités existent pour faire varier la vitesse d’une
machine asynchrone sans modifier la fréquence statorique. La pre-
mière consiste en la variation de l’amplitude de la tension statorique
et la deuxième en la modification de l’impédance équivalente du
rotor. Elles correspondent respectivement au gradateur et à la cas-
cade hyposynchrone.
1.1 Variation de tension : gradateur
1.1.1 Principe
Si on néglige les pertes dans le stator, le couple électromagnéti-
que du moteur asynchrone triphasé (voir [D 3 490], relation (4) ou
[D 3 480], § 3.8) est donné par la relation :
(1)
avec
g
le glissement :
g
= (
N
s
−
N
)/
N
s
où
N
s
=
Ω
s
/2
π
=
ω
s
/2
π
P
est la vitesse de rotation (en
Cem 3Pm2Vs
2Rrg
ω
s
⁄()
Rrg⁄()
2r
ω
s
()
2
+
-------------------------------------------------=
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230tiwekacontentpdf_d3620

_____________________________________________________________________________________________________________ MACHINES ASYNCHRONES
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur
D 3 620
−
3
tr/s) du champ tournant ou vitesse de synchronisme,
et
N
=
Ω
/2
π
est celle du rotor (en tr/s),
Ω
s
la vitesse angulaire de rotation du champ
magnétique,
Ω
la vitesse angulaire de rotation du rotor,
l’inductance de fuites totales par phase du rotor :
où
σ
est le coefficient de dispersion et
L
r
l’inductance
propre du rotor,
m
le rapport de transformation du moteur,
R
r
la résistance par phase du rotor,
P
le nombre de paires de pôles,
V
s
la valeur efficace de la tension par phase au stator,
ω
s
la pulsation statorique.
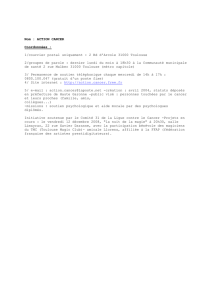
Le couple électromagnétique est donc proportionnel au carré de
la tension statorique. La variation de
V
s
modifie la caractéristique
C
em
(
N
), comme indiqué sur la figure
1
. Les divers points de fonc-
tionnement, à l’intersection des caractéristiques du couple électro-
magnétique et de deux caractéristiques de couple de charge
C
r
(
N
) :
C
r
=
Cte
et
C
r
=
k
1
N
2
montrent une variation de la vitesse selon la tension appliquée au
stator. Plus faible est la pente de la caractéristique
C
em
(
N
) au voisi-
nage de la vitesse de synchronisme, plus grande est l’amplitude de
variation de vitesse pour une variation de tension donnée (figure
2
).
Cette pente est d’autant plus faible que
R
r
est grande, mais c’est au
détriment du rendement de la machine.
Ce type de variateur fonctionne d’autant mieux que le couple est
fonction de la vitesse et en particulier avec des charges opposant un
couple proportionnel au carré de la vitesse (pompes, ventilateurs,
compresseurs...).
1.1.2 Association gradateur-machine asynchrone
Pour faire varier l’amplitude de la tension, on place sur le stator
un convertisseur à thyristors, appelé gradateur, dont un exemple de
circuit est montré sur la figure
3
. Ce circuit est l’un des nombreux
utilisés. La grandeur de commande est l’angle d’amorçage
α
des
thyristors. Sur la figure
4
sont représentées les formes idéalisées
des signaux de tension et de courant statoriques en fonctionnement
moteur et génératrice. Une synchronisation des commandes permet
l’obtention d’un système équilibré de tensions triphasées au stator
de la machine. Nous constatons que ces tensions possèdent un taux
d’harmoniques élevé.
Figure 1 – Caractéristiques couple-vitesse d’une machine asynchrone
pour différentes valeurs de la tension statorique de la phase 1
Figure 2 – Caractéristiques couple-vitesse d’une machine
à forte résistance rotorique
rr
σ
Lr
=
(Vs1)1 > (Vs1)2 > … > (Vs1)5
0Ns
0
(Cem)max
Cr = Cte
Cem
N
(Vs1)1
(Vs1)2
(Vs1)3
(Vs1)4
(Vs1)5
Cr =
=
k1N2
Cr = k1N2
(Vs1)1 > (Vs1)2 > …
0Ns
N1
N2
N3
0
Cr
Cem
N
(Vs1)1
(Vs1)2
(Vs1)3
Figure 3 – Schéma de gradateur
Figure 4 – Forme des signaux courant et tension à la sortie
du gradateur
MA
1
2
3
V1Vs1
is2
is1
is3
MA machine asynchrone
0
is1
Vs1 V1Vs1
is1
ω
s t
α
0
is1
Vs1 V1Vs1
is1
ω
s t
α'
V1 tension du réseau
Les parties en bleu sont limitées par la tension
par phase appliquée au stator.
fonctionnement en génératrice
b
fonctionnement en moteur
a
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230tiwekacontentpdf_d3620

MACHINES ASYNCHRONES ______________________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 3 620
−
4
© Techniques de l’Ingénieur
Pour augmenter la plage de variation de vitesse, il faut utiliser des
moteurs à fort glissement (figure
2
), c’est-à-dire des moteurs à cage
très résistante. L’inconvénient réside dans leur mauvais rendement,
celui du rotor seul vaut (1
−
g
). L’utilisation de moteurs autoventilés,
de construction classique, nécessite de prendre en compte l’évolu-
tion des pertes rotoriques en fonction de la vitesse. On considère
successivement les trois types de couple résistant habituellement
rencontrés. Le couple électromagnétique, dans le domaine de
vitesse utilisé, s’exprime en première approximation selon
l’expression :
C
em
=
AR
r
(
I
r
)
2
/g(2)
avec Irla valeur efficace du courant par phase au rotor,
Aune constante dépendant des paramètres de la
machine.
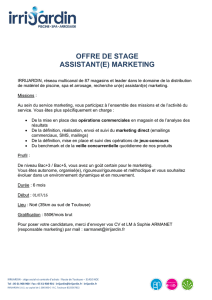
■Couple résistant proportionnel au carré de la vitesse :
Cr1 = k1N2
On a, à l’équilibre :
soit (3)
La variation de ce courant en fonction de g est représentée sur la
figure 5a et il passe par un maximum pour g = 1/3.
■Couple résistant proportionnel à la vitesse :
Cr2 = k2N
Le courant rotorique a pour expression :
(4)
dont les variations sont indiquées sur la figure 5b et dont le maxi-
mum est atteint pour g = 1/2.
■Couple résistant constant :
Cr3 = k3
Le courant rotorique est :
(5)
dont les variations sont représentées sur la figure 5c et dont le
maximum est atteint pour g = 1.
Cette comparaison montre l’intérêt de ce variateur avec un couple
de charge dépendant de la vitesse et de préférence proportionnel au
carré de la vitesse, de manière que le courant maximal apparaisse
pour des vitesses encore élevées et donc une capacité de refroidis-
sement pas trop réduite.
Le démarrage sera facilité également avec un couple de charge
nul à l’arrêt.
Le passage moteur/génératrice se fait par action sur l’angle
d’amorçage α en passant de α à π − α. On peut associer au gradateur
une régulation de vitesse qui règle l’angle α.
1.1.3 Conclusion
L’association gradateur-machine asynchrone présente les avan-
tages suivants :
— simplicité du montage ;
— commutation naturelle des semi-conducteurs ;
— utilisation de moteurs à cage ;
— possibilité de fonctionnement dans les quatre quadrants du
plan couple-vitesse.
Mais cette association est caractérisée par deux principaux
inconvénients :
— faible variation de vitesse ;
— limitation aux faibles puissances en raison de la dégradation
importante du rendement, surtout à basse vitesse et en raison de la
pollution harmonique du réseau. On ne dépasse pas quelques dizai-
nes de kilowatts.
Les principales applications de ce type de variateur sont la venti-
lation et le pompage.
Figure 5 – Variation du courant rotorique en fonction du glissement
pour plusieurs types de couple résistant
0 11/3
0
(Ir)1 max
(Ir)1
g
0 11/2
0
(Ir)2 max
(Ir)2
g
01
0
(Ir)3 max
(Ir)3
g
Cr2 = k2 N
b
Cr1 = k1 N2
a
Cr3 = k3 = Ctec
ARrIr
()
1
2gk1Ns
21g–()
2
=Ir
()
11g–()Nsk1g
ARr
----------
=
Ir
()
2k2Nsg1g–()
ARr
-----------------------------------
=
Ir
()
3k3g
ARr
----------
=
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230
Ce document a été délivré pour le compte de 7200045062 - universite de toulouse // 130.120.56.230tiwekacontentpdf_d3620
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%