See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/275406867
ÉTUDE ET DIMENTIONNEMENT D'UN SUIVEUR SOLAIRE POUR LA GÉNÉRATION
D'ÉNERGIE PV
Conference Paper · November 2013
CITATIONS
0
READS
9,150
2 authors, including:
Some of the authors of this publication are also working on these related projects:
Energy Economy View project
Process Monitoring (RasPI Monitor) View project
Tamali Mohammed
Bechar University Faculty of Technology
81 PUBLICATIONS96 CITATIONS
SEE PROFILE
All content following this page was uploaded by Tamali Mohammed on 25 April 2015.
The user has requested enhancement of the downloaded file.

ÉTUDE ET DIMENTIONNEMENT D’UN
SUIVEUR SOLAIRE POUR LA GÉNÉRATION
D’ÉNERGIE PV
MOKEDDEM Ali & TAMALI Mohammed
Faculté des Sciences et de la Technologie
Département de Technologie
Université de Bechar
N°185 Hay Elfourssan Dabdaba Bechar
ENERGARID Lab. - SimulIA
Abstract—L’intérêt porté à l'énergie solaire, et à son
utilisation dans divers domaines, soit énergétiques, chimiques ou
même médicales, n'est pas nouveau, mais à cause de son
importance qui devenait plus évident chaque jour que son
précédent.
Dans ce contexte, on a essayé de trouver dans ce travail des
solutions pour bien optimiser l'utilisation de cette énergie en
contrôlant le panneau solaire et on le dirigeant vers le soleil,
perpendiculairement à ses rayons le long de sa durée de luminosité,
pour s’adapter à sa vitesse micro-régulière, cet ordre cosmique est
caractérisé par sa rigueur infinie, si on peut trouver des voies et des
lois physiques proches de point de vue précision et exactitude de ce
système, nous pourrons bien exploiter ses ressources et c'est ce qui
s'applique à la coordination du panneau solaire à la vitesse du soleil
et à la verticalité de ses rayons. Cela conduirait à la production
d’une grande capacité électrique qui augmente le rendement du
panneau solaire et donc, dispenser ou abaisser l’utilisation des
sources énergétiques traditionnelles (combustibles), cela conduit à
son tour à une diminution des émissions de gaz responsables de
l’effet de serre et à une maintenance de la stabilité du système
naturel.
I. I
NTRODUCTION
l’étude effectuée à la licence est convenus que la
définition de l'économie d'énergie correspond à une diminution
de la consommation énergétique, permettre d'identifier les
gisements d'économie d'énergie et de mettre en œuvre rapidement
des actions de maîtrise de l'énergie rentables économiquement et
réduire l'émission de gaz à effet de serre par intégration des
ressources renouvelables (système PV).
On à résumer notre problématique par :
1- Augmentation de la productivité énergétique des
panneaux classiques :
C’est a dire l’augmentation de performance des panneaux
fixes . 2- Source de revenu supplémentaire :
La rentabilité financière étant directement liée à la
productivité énergétique, un suiveur de soleil maximise notre
investissement. Une telle installation n’est pas une source
d’économie mais bien un revenu supplémentaire pour le
particulier ou l’entreprise.
II. L
ES MODELES MATHEMATIQUES DE LA PRODUCTION DE
PUISSANCES MAXIMALES D
’
UN MODULE
PV
En général, il y’a beaucoup de modèles mathématiques de
puissance permettant de déterminer la puissance maximale
fournie par un générateur photovoltaïque en fonction de
variation de l’irradiation solaire et la température ambiante.
nous présenterons d’abord trois modèles, dont le premier
c’est un benchmark, et les deux autres sont des modèles
mathématiques permettant de déterminer la puissance
maximale en fonction de variation des conditions
météorologiques et puis nous comparons les modèles
présentés.
On a choisier le module 3 de Borowy et Salameh est le
plus optimale pour notre cas à plusieurs raisons :
on peut utiliser ce modèle dans les régions chaude comme
la région de sud d’Algérie (Bechar).
Il nous donner des formules pour calculer le point
optimum de voltage et le courant sous condition d’arbitraire;
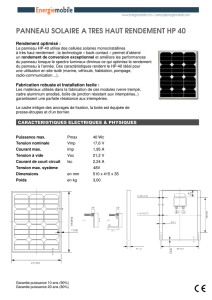
Ce modèle fait usage des spécifications des modules PV
offerts par les fabricants, donc il offre une façon très simple
d'accomplir la puissance produite par les modules PV

Il nous donner une relation mathématique pour calculé la
puissance maximale produite pour un nombre de modules
séries et parallèles.
III. C
ONCEPTION ET DIMENSIONNEMENT DU PANNEAU
PHOTOVOLTAÏQUE
A. Schéma Cinématique
Le schéma cinématique simplifié du mécanisme
d’entraînement des deux panneaux photovoltaïques mobile
est représenté dans la figure n°1.
Fig. 1. Schéma cinématique d’un panneau photovoltaïque
B. Etude mécanique
la vitesse de rotation du panneau ; ά=15dg/h = 0,26 rd/h.
longueur d’une journée (à Béchar) ; est égale à 12h
La puissance totale est : PT= PP+ PV +PF
PT= 61.1+16.19.24=96.82W ; PT ≈100
IV.
LOGICIEL DE SIMULATION
PV
EN LIGNE
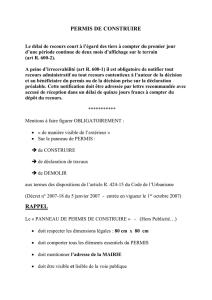
Ce logiciel nous permit de calculer la position du soleil dans
le ciel en un point de la terre à un moment donné de la journée.
A. Schéma Cinématique
Fig. 2. La carte géographique de wilaya de Béchar
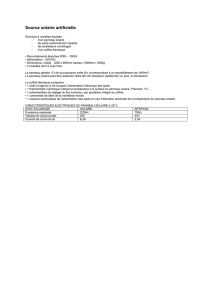
B. Graphique cartésien
Fig. 3. Le graphique cartésien de la trajectoire du soleil.
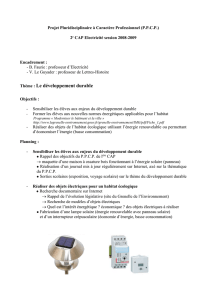
C. Graphique polaire
Fig. 4. Le graphique polaire de la trajectoire du soleil.
D. Tables
TABLE
I
L
’
ANGLE SOLAIRE ZENITHAL
,
L
’
ANGLE DE DECLINAISON ET LE
TEMPS DE L
’
ENSOLEILLEMENT

V. C
HOIX ET MODELISATION DU MOTEUR A COURANT CONTINU
Fig. 5. schéma d’asservissement de vitesse
VI.
I
MPLEMENTATION DU SYSTEME SOUS
M
ATLAB
/S
IMULINK
A. Modèle sous Matlab/Simulink
Nous avons utilisé le logiciel Matlab par la simulation de
notre système (suiveur de soleil).la figure ci dissous
montre le modèle de système implémenté sous
l’environnement Simulink.
Fig. 6. modèle d’un système de suiveur de soleil sous Matlab/Simulink
Le moteur responsable de faire tourner le panneau est
alimenté par l’énergie électrique générée par le panneau
photovoltaïque.
B. Résultats de simulation
La figure suivante montre les résultats de simulation de notre
système PV asservi en vitesse Ω.
0 1 2 3 4 5 6 7
x 10
4
0
1
2
3
4
5
6
7
8
9
t
Ia
Fig. 7. Variation du courant de gâchage
régulateur PI
wm
wref
Iref
Vitesse de réference (rad/s)
0.26
Vf 24V
Vdc 24 V
To Workspace
PV
Régulateur à hystérésis
Iref
Ia
g
Mosfet
gm
DS
Ls
Filter
D1
Couple résistant(N.m)
-
C
-
MCC
TL m
A+
F+
A-
F-
dc
<Speed wm (rad/s)>
<Speed wm (rad/s)>
<Armature current ia (A)>
G
G

0 1 2 3 4 5 6 7
x 10
4
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
t
Ω
Fig. 8. Variations de la vitesse de référence Ω
On trouve bien que la vitesse de moteur à courant
continue(Ω) suit sa référence Ω
réf
=0.26rf/s , ζ =0.7 et on
trouve que ζ n’excède pas 0,7.
VII. P
ROGRAMMATION DU
PIC
Le PIC utilisé dans cette application est programmé en
Pascal. L'utilisation du langage Pascal permet d'alléger
considérablement le développement d'une application.
La figure suivante présente une fenêtre du compilateur
micro pascal utilisé dans ce projet :
Fig. 9. Configuration de programme
C. Organigramme
NB : Le capteur fin de course
RC0 et RC1 sont fermés au repos
Tension sur l’LDR < 2,5v Jour
Tension sur l’LDR >2,5v Nuit
VIII. S
IMULATION ET ROUTAGE
A. Présentation de l’ISIS
Début
Initialisation
RB0 et RB1 :
Sorties
RC0 et RC1 :
Entrées
RA0 : Entrée
Analogique
Sortie
0
Lecture de la
tension sur
RA0 (LDR)
Tension
< 2 ,5 V
Oui
N
o
Lecture de
l’état de la
broche RC0
(capteur fin
de course)
RC0 = 1
Oui
N
o
RB0 1 (Moteur
sens avant)
Lecture de l’état de la
broche RC0
I I+1
Attente 10 ms
I = 50
Ou RC0
= 1
Oui
N
o
RB0 0
(arrêt moteur)
Attente 5 s
RB1 1 (Moteur
sens arrière)
Lecture de l’état de la
broche
RC1 (capteur fin de
course)
RC1 = 1
Oui
N
o
 6
6
1
/
6
100%