Capteurs Industriels : Cours sur les Capteurs de Position et de Pression
Telechargé par
bookdone

Les capteurs industriels

Quelques généralités et définitions...
Le premier élément de la chaîne de mesure est le capteur. La grandeur
physique à mesurer lui est directement appliquée. Le terme de sonde est
plutôt réservé à l'élément du capteur situé localement au point de mesurage.
Le transmetteur ou conditionneur transforme le signal électrique en un
signal transmissible de haut niveau, le plus souvent conforme à un standard
de transmission, qu'elle s'effectue sous forme analogique ou numérique.
CAPTEUR CONDITIONNEUR RECEPTEUR
GRANDEUR
PHYSIQUE INFORMATION
A TRAITER
Ligne de
transmission
Transformer
gandeur physique
en signal électrique
Adapter
le signal électrique
en vue de sa
transmission
Réception du
signal transmis
et adaptation
à l'unité de
traitement

A l'autre bout de la ligne de transmission le récepteur adapte le signal à
l'unité de traitement, le plus souvent numérique.
Actuellement de nombreux capteurs à électronique incorporée sont en réalité
des ensembles capteur + transmetteur. Des capteurs sont directement
raccordables à un réseau comme ethernet (transmission série rapide multi-
point) ou communiquent par liaison sans fil.
CAPTEUR CONDITIONNEUR RECEPTEUR
GRANDEUR
PHYSIQUE INFORMATION
A TRAITER
Ligne de
transmission
Transformer
gandeur physique
en signal électrique
Adapter
le signal électrique
en vue de sa
transmission
Réception du
signal transmis
et adaptation
à l'unité de
traitement
Signal
électrique
Pression
Poids
Position
Vitesse
Température
∩ : transmission analogique
0 - 10V
4 - 20mA
# : transmission numérique
RS 232-C
ETHERNET
Liaisons sans fil
Automate
PC

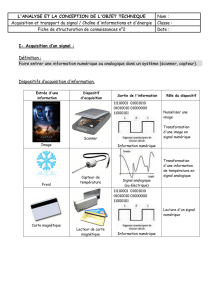
CAPTEUR / CONDITIONNEUR RECEPTEUR
INFORMATION
A TRAITER
Pression
0-10 bars Capteur de pression
à sortie 4-20 mA
Carte de conversion
analogique / numériqueSignal normalisé
4-20 mA
Mesure de pression
Pression

CAPTEUR CONDITIONNEUR RECEPTEUR
INFORMATION
A TRAITER
Masse
0-100kg
Capteur à
jauges de
contraintes Signal
analogique
bas niveau
Conversion
ana / num
Transmission Signal numérique
norme RS-232C
Module de
communication
RS-232C
Mesure de poids
Poids
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
1
/
40
100%