TP : Focométrie et Instruments d`optique

TP : Focométrie et Instruments d’optique
Objectifs :
- Éclairer un objet de manière adaptée.
- Choisir une ou plusieurs lentilles en fonction des contraintes expérimentales, et choisir leur focale de
façon raisonnée.
- Optimiser la qualité d’une image (alignement, limitation des aberrations...).
- Estimer l’ordre de grandeur d’une distance focale.
- Régler et mettre en œuvre une lunette autocollimatrice et un collimateur.
- Modéliser expérimentalement à l’aide de plusieurs lentilles un dispositif optique d’utilisation
courante
1. Formation d’images
Déterminer et mettre en œuvre des protocoles expérimentaux permettant de visualiser :
- des images réelles, à l’infini, virtuelle à l’aide d’une lentille convergente;
- des images réelle, à l’infini, virtuelle à l’aide d’une lentille divergente;
- l’effet d’un diaphragme sur la profondeur de champ.
2. Focométrie
Déterminer et mettre en œuvre quatre protocoles expérimentaux permettant de déterminer la distance focale
d’une lentille convergente.
Comparer la précision des expériences en estimant les incertitudes.
Déterminer et mettre en œuvre un protocole expérimental permettant de déterminer la distance focale d’une
lentille divergente.
3. Élaboration d’un modèle d’instrument d’optique
Déterminer et mettre en œuvre un protocole expérimental permettant de modéliser une lunette astronomique.
Observer alors l’image crée par un collimateur.
Réaliser un microscope

Annexe 1 : Focométrie
Focométrie des lentilles CV
Estimation CV
Méthode grossière mais rapide : image d’une source à l’infini ; soleil ou même plafonnier
Lorsque l’image est la plus ponctuelle possible la distance lentille-écran est égale à la distance focale.
Si on ne dispose pas de source éloignée ; effet loupe
Plaçons la lentille convergente contre un objet : l’image de cet objet observé à travers la lentille est nette.
Ecartons la lentille de l’objet ; l’image reste nette puis elle devient floue
En fait l’image est nette temps que l’objet reste entre la lentille et le plan focal
Mesure CV
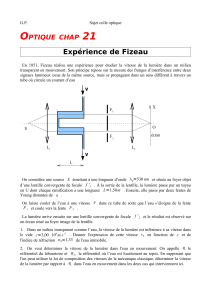
Auto collimation :
Cette méthode ne s'applique qu'aux lentilles convergentes.
Sur un banc d'optique, on place un objet lumineux, la lentille à étudier et dans un plan parallèle à celui de la
lentille un miroir plan. La distance entre le miroir et la lentille est quelconque.
Si la source est confondue avec le foyer de la lentille, tout rayon émerge de la lentille parallèlement à l'axe
optique, frappe le miroir et revient sur lui-même : l'image (réelle) se forme dans le plan focal avec un
grandissement égal à -1.
On accole un miroir plan à la lentille et on forme l’image d’une source ponctuelle (obtenue en diaphragmant une source
étendue). On incline très légèrement l’ensemble par rapport à la direction de visée. Lorsque l’image nette de la source
ponctuelle se forme à coté de la source sur le diagramme la distance entre la lentille et le diaphragme est égale à la
distance focale.
Voici ce qui se passe :

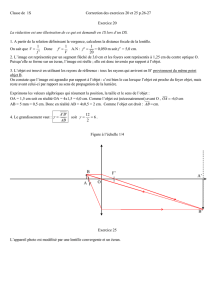
Méthode de Bessel :
Cette méthode ne s'applique qu'aux lentilles convergentes.
Sur un banc d'optique, on place un objet lumineux et un écran situé à la distance D de la source. Il existe
deux positions de la lentille qui permettent d'obtenir une image nette de l'objet sur l'écran. Ces deux positions
sont séparées par la distance d. On a alors .
Pour une distance D suffisante entre objet source et écran, il existe deux positions de la lentille qui forment l’image de
l’objet sur l’écran, c’est à dire qui conjuguent les positions de la source et de l’écran. Démontrons-le :
On doit avoir :
D = -p + p’
1 1 1
''p p f
soit p²+pD+Df’= 0
Le discriminant de cette équation =D²-4Df’ n’est positif que si f’<D/4 ce qui est la condition annoncée pour qu’il existe
des solutions ; alors ces solutions correspondent à
12
² 4 '
2
² 4 ' ² 4 '
soit et -
22
D D Df
p
D D Df D D Df
pp
soient deux solutions symétriques autour du point milieu entre la source et l’écran
Entre les deux positions de la lentille qui forment l’image on a une distance a que l’on mesure. Le calcul précédent
montre que a= v (D²-4Df’)
Soit que
D²-a²
f' = 4D
ce qui fournit une méthode expérimentale pour mesurer f’
D/2
D/2
v (D²-4Df’)/2
-p2
D/2
D/2
v (D²-4Df’)/2
-p1

Méthode de Silbermann :
Cette méthode ne s'applique qu'aux lentilles convergentes.
Sur un banc d'optique, on place un objet lumineux et un écran situé à la distance D de la source.
On cherche la position de la lentille et de l’écran pour observer un grandissement de -1. On a alors .
Il s’agit d’un cas particulier de la méthode précédente
Lorsque D = 4f’ il n’existe qu’une seule position qui conjugue source et écran la lentille étant alors au milieu de la source et
de l’écran, l’équation du second degré a une racine double.
On peut trouver DSilberman et par suite 4f’ en augmentant D progressivement tout en conservant pour la lentille une position
médiane. On arrive à DSilbermann quand on forme l’image.
Méthode de régression linéaire
La formule de conjugaison :
1 1 1
''p p f
peut être réarrangée selon
1 1 1
''p p f
On mesure donc les positions p et p’ d’un ensemble d’objets et images conjuguées par la lentille et on porte 1/p’ en
fonction de 1/p . On trace la droite qui régresse sur les points expérimentaux. L’endroit ou cette droite intersecte l’axe
vertical donne la vergence de la lentille
Focométrie des lentilles DV
0) Evaluation, rapide mais délicate
Projetons l’image d’un objet à l’infini en le plaçant au foyer objet d’une lentille auxiliaire CV ou prenons un objet à l’infini,
plaçons dans le faisceau parallèle ainsi généré la lentille divergente de focale inconnue. L’image à l’infini pour le système
auxiliaire constitue ainsi un objet à l’infini pour la lentille Dv qui en forme une image au foyer image avant elle.
Si nous plaçons notre œil après la lentille DV et que nous mettons un crayon sous l’image observée afin de voir net en
même temps le crayon et l’image alors la distance entre le crayon et la lentille Dv est l’opposé de sa focale. Attention le
crayon doit être vu directement pas à travers la lentille divergente.
1) Accoler une lentille
Accoler une lentille suffisamment convergente de focale image f’CV pour que le doublet accolé résultant soit convergent ;
on est alors ramené au cas d’une lentille CV ; on mesure f’eq et on en déduit f’DV par
' ' '
1 1 1
eq CV DV
f f f

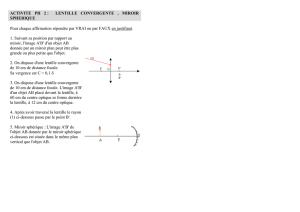
2) Méthode d’autocollimation
A l’aide d’un condenseur, d’un diaphragme et d’une lentille convergente, on réalise un faisceau bien parallèle, qui attaque
une lentille convergente de focale f’C connue. On place derrière cette convergente la divergente de focale inconnue suivie
d’un miroir plan que l’on peut accoler par commodité. Lorsque la distance entre la convergente et la divergente est f’CV +
f’DV (on rappelle que f’DV<0) alors on forme sur le diaphragme à coté du trou source l’image autocollimatée de ce dernier.
Pour que ce dispositif fonctionne il est bien sur nécessaire que la vergence de la lentille convergente soit inférieure à la
valeur absolue de la vergence de la lentille divergente soit que la focale de la lentille convergente soit supérieure à la
valeur absolue de la focale de la lentille divergente
3) Méthode de neutralisation
On accole à la lentille (L) de distance focale inconnue, une lentille de vergence opposée de manière que l’ensemble se comporte
comme une lame à faces //. Former d’un objet l’image à travers le doublet et déplacer le doublet vers le haut si le doublet est
divergent l’image se déplace vers le haut si il est convergent vers le bas si la vergence est nulle l’image reste fixe.
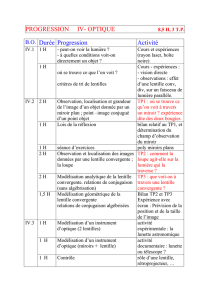
4) Méthode de Badal pour une lentille DV
L1 et L2 sont des lentilles auxiliaires convergentes de distance focale image connues f’1 et f’2 >0
L est une lentille divergente de focale image inconnue f’ <0 on la place dans le plan focal objet de L2
Dans la deuxième situation la lentille L2 a plus de travail à faire pour rabattre les rayons ça converge plus loin.
Relier f’ distance focale image de la lentille DV à tester à la distance focale image de la deuxième lentille auxiliaire f’2 et à la
distance entre les deux positions de l’écran D
22
2 2 2 2 2 2
La formule de Newton donne F . ' ' F '. ' ' ' ' 'AF A F F A f f D f
f’C
-f’D
L1
L2
L1
L2
L
D
F2
F’
F’2
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%