Curso de Microprocesadores: Arquitectura, Programación e Interfaces
Telechargé par
asmae-azz

Table des mati`eres
1 Historique et ´evolution des ordinateurs 1
1.1 «Pr´ehistoire »desordinateurs......................... 1
1.2 Machines ´electrom´ecaniques .......................... 1
1.3 Machines ´electroniques............................. 1
1.4 Machinesactuelles ............................... 2
2 Architecture et fonctionnement d’un microprocesseur 3
2.1 Structured’uncalculateur ........................... 3
2.2 Organisation de la m´emoirecentrale...................... 4
2.3 Circulation de l’information dans un calculateur . . . . . . . . . . . . . . . 5
2.4 Description mat´erielled’unmicroprocesseur ................. 6
2.5 Fonctionnementd’unmicroprocesseur..................... 6
3 Les m´emoires 11
3.1 M´emoiresROMetRAM............................ 11
3.2 Sch´ema fonctionnel d’une m´emoire ...................... 11
3.3 Interfa¸cage microprocesseur/m´emoire..................... 12
3.4 Chronogrammes de lecture/´ecriture en m´emoire ............... 13
3.5 Connection de plusieurs boˆıtiers m´emoire................... 14
3.6 D´ecodaged’adresses .............................. 16
3.7 Classification des m´emoires........................... 17
4 Le microprocesseur Intel 8086 19
4.1 Description physique du 8086 . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 Sch´ema fonctionnel du 8086 . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3 Description et utilisation des signaux du 8086 . . . . . . . . . . . . . . . . 20
4.4 Organisation interne du 8086 . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.5 Gestion de la m´emoire par le 8086 . . . . . . . . . . . . . . . . . . . . . . . 29
4.6 Le microprocesseur 8088 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5 La programmation en assembleur du microprocesseur 8086 33
5.1 G´en´eralit´es ................................... 33
5.2 Lesinstructionsdetransfert .......................... 33
5.3 Les instructions arithm´etiques......................... 37
5.4 Lesinstructionslogiques ............................ 38
HAGG`
EGE, 2003 cours de microprocesseur ISET Rad`es

iv Table des mati`eres
5.5 Lesinstructionsdebranchement........................ 42
5.6 M´ethodesdeprogrammation.......................... 48
6 Les interfaces d’entr´ees/sorties 51
6.1 D´efinitions.................................... 51
6.2 Adressagedesportsd’E/S ........................... 52
6.3 Gestion des ports d’E/S par le 8086 . . . . . . . . . . . . . . . . . . . . . . 53
6.4 L’interface parall`ele 8255 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.5 L’interface s´erie 8250 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
7 Les interruptions 71
7.1 D´efinitiond’uneinterruption.......................... 71
7.2 Prise en charge d’une interruption par le microprocesseur . . . . . . . . . . 72
7.3 Adresses des sous-programmes d’interruptions . . . . . . . . . . . . . . . . 73
7.4 Les interruptions du 8086 . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
7.5 Le contrˆoleur programmable d’interruptions 8259 . . . . . . . . . . . . . . 75
Annexe - Jeu d’instructions du 8086 77
Bibliographie 81
ISET Rad`es cours de microprocesseur HAGG`
EGE, 2003

Chapitre 1
Historique et ´evolution des
ordinateurs
1.1 «Pr´ehistoire »des ordinateurs
Les premi`eres machines `acalculer´etaient purement m´ecaniques : bouliers, abaques, ...
(antiquit´e).
Premi`ere vraie machine `a calculer : Pascal, 1642, machine `a additionner.
Machine `a multiplier : Leibniz, 1694, bas´ee sur les travaux de John Neper (1617, loga-
rithmes).
Premi`ere machine programmable : m´etier `a tisser, Jacquard, xviii`eme si`ecle, machine `a
cartes perfor´ees.
Machine programmable universelle : Babbage, xviii`eme si`ecle, non r´ealisable avec les tech-
nologies de l’´epoque (machines `a vapeur), principe des machines actuelles.
1.2 Machines ´electrom´ecaniques
Machine `acalculer`a cartes perfor´ees : Hermann Hollerith, 1885, facilite le recensement
am´ericain.
Machines industrielles pour la comptabilit´e et les statistiques. Ces machines sont `abase
de relais ´electrom´ecaniques (Aiken et Stibitz, 1936-1939).
1.3 Machines ´electroniques
Premi`ere machine `acalculer´electronique : ENIAC, 1944, Eckert et Mauchly, 18000 tubes
´electroniques, machine `a programme cˆabl´e.
Machine `a programme enregist´e : John Von Neumann, 1946, les instructions sont enre-
gistr´ees dans la m´emoire du calculateur : ordinateur.
Premier ordinateur commercialis´e : SSEC d’IBM, 1948.
Ordinateur `a transistors : 1963, PDP5 de Digital Equipment Corporation (DEC), intro-
duction des m´emoires `a ferrites : mini-ordinateurs.
HAGG`
EGE, 2003 cours de microprocesseur ISET Rad`es

2 Chapitre 1 - Historique et ´evolution des ordinateurs
Micro-ordinateurs : 1969-70, utilisation des circuits int´egr´es LSI.
Premier microprocesseur : Intel, 1971, microprocesseur 4004, puis 8008, premier micro-
ordinateur : le Micral, 1973, France, puis l’Altair, 1975, Etats-Unis.
Autres microprocesseurs : 8080 et 8085 d’Intel, 6800 de Motorola, Z80 de Zilog : micro-
processeurs 8 bits, d´ebut des ann´ees 1980.
Microprocesseurs 16 bits : 8086/8088 d’Intel, 68000 de Motorola.
Microprocesseurs 32 bits en 1986 : 80386 d’Intel et 68020 de Motorola.
Fabrication en grandes s´eries des micro-ordinateurs : 1977, Apple, Commodore, Tandy.
IBM PC + MS-DOS (Microsoft) en 1981.
1.4 Machines actuelles
Ordinateurs de plus en plus puissants, bas´es sur des microprocesseurs performants : Pen-
tium, Power PC, ...
Nouvelles architectures de microprocesseurs : RISC.
Applications multim´edia, r´eseaux, ...
Syst`emes embarqu´es : microcontrˆoleurs, processeurs de traitement de signal (DSP), ...
ISET Rad`es cours de microprocesseur HAGG`
EGE, 2003

Chapitre 2
Architecture et fonctionnement d’un
microprocesseur
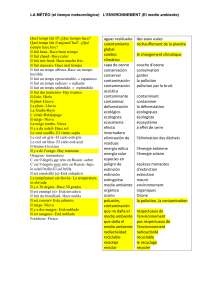
2.1 Structure d’un calculateur
horloge
unité
de contrôle
registres
unité
arithmétique
et logique
(UAL)
unité
de
transfert
unité
d'entrées/
sorties
mémoire
centrale
monde extérieur
(périphériques,
capteurs,
actionneurs, ...)
unité centrale de traitement (UCT)
: ordre ou commande
: données
L’´el´ement de base d’un calculateur est constitu´eparl’unit´e centrale de traitement
(UCT, CPU : Central Processing Unit). L’UCT est constitu´ee :
•d’une unit´e arithm´etique et logique (UAL, ALU : Arithmetic and Logic Unit) :
c’est l’organe de calcul du calculateur ;
•de registres : zones de stockage des donn´ees de travail de l’UAL (op´erandes,
r´esultats interm´ediaires) ;
•d’une unit´edecontrˆole (UC, CU : Control Unit) : elle envoie les ordres (ou com-
mandes) `a tous les autres ´el´ements du calculateur afin d’ex´ecuter un programme.
La m´emoire centrale contient :
•le programme `aex´ecuter : suite d’instructions ´el´ementaires ;
•les donn´ees `a traiter.
HAGG`
EGE, 2003 cours de microprocesseur ISET Rad`es
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
1
/
84
100%