Microsatellite ADCS Design & Implementation: SIL Approach
Telechargé par
Responsable FPEAéro

Research Article
Microsatellite Attitude Determination and Control Subsystem
Design and Implementation: Software-in-the-Loop Approach
Ho-Nien Shou
Department of Aviation & Communication Electronics, Air Force Institute of Technology, Kaohsiung 820, Taiwan
Correspondence should be addressed to Ho-Nien Shou; lon[email protected]
Received February ; Accepted March ; Published May
Academic Editor: Her-Terng Yau
Copyright © Ho-Nien Shou. is is an open access article distributed under the Creative Commons Attribution License, which
permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
e paper describes the development of a microsatellite attitude determination and control subsystem (ADCS) and verication of
its functionality by soware-in-the-loop (SIL) method. e role of ADCS is to provide attitude control functions, including the
de-tumbling and stabilizing the satellite angular velocity, and as well as estimating the orbit and attitude information during the
satellite operation. In Taiwan, Air Force Institute of Technology (AFIT), dedicating for students to design experimental low earth
orbit micro-satellite, called AFITsat. For AFITsat, the operation of the ADCS consists of three modes which are initialization mode,
detumbling mode, and normal mode, respectively. During the initialization mode, ADCS collects the early orbit measurement data
from various sensors so that the data can be downlinked to the ground station for further analysis. As particularly emphasized in
this paper, during the detumbling mode, ADCS implements the thrusters in plus-wide modulation control method to decrease the
satellite angular velocity. ADCS provides the attitude determination function for the estimation of the satellite state, during normal
mode. e three modes of microsatellite adopted Kalman lter algorithm estimate microsatellite attitude. is paper will discuss
using the SIL validation ADCS function and verify its feasibility.
1. Introduction
epurposeofthesatelliteprojectistoestablishindigenous
capability for spacecra development, including the design,
analysis, manufacturing, assembly, integration, tests, and in-
space validation. e paper is relevant to the design and
implement of the attitude determination and control sub-
system (ADCS) for a microsatellite simulation in soware.
e simulation of the system in soware, settle SIL, is the
aimofthepaper.Inasatellitemission,theADCSplaysan
important role as it provides the attitude information of the
satellite and stabilizes the satellite. e design of the ADCS is
typically divided into several phases, including simulation of
the system in soware, implementation into hardware, real-
ization and implementation of coding in hardware, and the
verication test of the system. SIL for research development
easy and do not have to spend too much hardware funding;
it is suitable for students in the lab as a topic of special
purpose.
Micro-satellite Attitude Determination and Control Sub-
system Design and Implementation: Soware-in-the-loop
Approach.
To support the satellite mission, the ADCS is required to
provide the in-orbit attitude control and determination func-
tions. e attitude control function includes the stabilization
and detumbling control of the satellite to the prerequisite
value, while the attitude determination function is to facilitate
the estimated attitude information. ADCS will also operate
and record the pertinent data aer the separation of satellite
from the launcher.
SIL is on a mathematical model, in theory, to com-
plete the preliminary microsatellite ADCS design. e SIL
platform contains a dynamic simulator and a real-time
microcontroller, as well as some interfacing circuitry. e
dynamic simulator is capable of performing simulation of the
space environment, orbit dynamics, attitude dynamics, and
sensor/actuator models. e controller/estimator of ADCS
is a realization of the embedded microcontroller for attitude
Hindawi Publishing Corporation
Mathematical Problems in Engineering
Volume 2014, Article ID 904708, 12 pages
http://dx.doi.org/10.1155/2014/904708

Mathematical Problems in Engineering
determination and control. In this paper, the requirements
of AFITsat ADCS will be briey reviewed. e design and
implementation of AFITsat ADCS will also be described [–
]. Furthermore, the design of the ADCS design can then be
veriedbytheSILtestandtheperformanceoftheADCScan
be observed from the simulation results.
In designing the ADCS, the satellite environment,
dynamics, control, and estimation functions are simulated
through a SIL simulation endeavor. SIL simulation is a
virtual platform which can provide the simulation of the
satellite working environment, satellite dynamics, and ADCS
instruments including attitude sensors and actuators. Besides
oering a exible working platform for the early design stage
of ADCS, SIL also eases the modication of the design by
modulized all the models. e attitude determination lter
andattitudecontrollawareveriedthroughthisSIL.Aer
the simulation of ADCS in soware, the ADCS algorithm has
to be implemented in the ADCS on board microcontroller.
To fully develop a veriable ADCS algorithm, a processor-
in-the-loop (PIL) test is developed. PIL test is a way to bridge
the gap between the simulation results and the nal system
construction. It increases the realism of the simulation and
provides access to hardware features that are currently not
available in the soware-only simulation. PIL enables the
testing of the actual control and estimation codes running on
the microcontroller in the verication environment.
is paper is organized into six sections, which are
introduction, ADCS design, ADCS verication, verication
results, and conclusions, respectively. In Section ,thesatel-
lite model and space environment are briey reviewed. e
dynamics and kinematics models of the satellite are derived.
Moreover, the design of attitude controller and lter are
described. e verication methods and platform setups are
addressed in Section .Sectionreviews nonlinear ∞
robust control law. Section is brief introduction of the
algorithmofunscentedKalmanlter(UKF)andattituderate
estimator is described. Aer that, the results from ADCS
simulation and verication test are provided and discussed in
Section . At last, the paper is concluded with the summary
and some remarks for the future research are depicted.
2. ADCS Design
2.1. Satellite Model. e dynamics of the spacecra in inertial
space are governed by Euler’s equations of motion [–]
J
𝜔+𝜔×J𝜔=𝜏𝑐+𝜏𝑑,()
where Jis the moment of inertia which is symmetric:
J=J0+JΔ=
𝑥𝑥 00
0
𝑦𝑦 0
00
𝑧𝑧
+
𝑥𝑥 00
0
𝑦𝑦 0
00
𝑧𝑧
,()
with 𝑖𝑖 being the moment of inertia along the -axis and
moment of inertia uncertain elements are expanded around
the nominal point in th direction with uncertainty, 𝑖𝑖 +𝑖𝑖,
𝑖𝑖 the inertia moment decrease progressively in submodes
transition, 𝜔isthevectorofangularratesofthesatellitein
body frame, and 𝑖is the satellite angular rates in the th
axis, the moment acting on satellite which consists of control
torque applied to the satellite 𝜏𝑐and disturbance torques 𝜏𝑑,
𝜏𝑑including gravity gradient force, air resistance force, and
magnetic disturbed force various sources.
𝜔×=0−𝜔
𝑧𝜔𝑦
𝜔𝑧0−𝜔
𝑥
−𝜔𝑦𝜔𝑥0is a corresponding 𝜔opposing skew
matrix.
e kinematic update of the satellite is realized by using
the quaternion representation. e following vector set of
dierential equations is used:
=−𝜔×𝜔
−𝜔𝑇0q
4, ()
where qistheattitudequaternionvector=
q4𝑇,q=
123𝑇, for convenient. e derivative of quaternion in
() can also be arranged as
q=1
2𝜔()
with
=
4−32
34−1
−214
−1−2−3
.()
2.2. Environment Model. e space environment must be
considered in modeling and analyzing the motion of space-
cra. e space environment models including magnetic eld
model, Earth’s upper atmosphere model, and sun position
model are described in the following. In the magnetic
eld model, the International Geomagnetic Reference Field
(IGRF) is an attempt by the International Association of Geo-
magnetism and Aeronomy (IAGA) to provide a geomagnetic
eld mathematical model []. In the SIL design, the latest
IGRF model, IGRF , is adopted.
Models of the upper atmosphere are usually based on
either empirical or theoretical work. e main concern is
about the total atmospheric density in upper atmospheric,
which will aect the satellite attitude. e atmospheric
density is determined by a modied analytical expression of
the Jacchia-Roberts theory []. For microsatellite which is
planned to operate at the altitude of km, the atmospheric
density is about 1.454×10−13 kgm−3.
By knowing the Sun’s orbit and position with respect
to the satellite, the eclipse/shadowing status of satellite can
be determined. e microsatellite ADCS is concerned with
the satellite solar eclipse because the sun sensor reading
is aected. To this end, the sun position model is also
incorporated.
Satellites are subject to many types of disturbances
which will aect the attitude of the satellite in space. e
dominant sources of attitude disturbance torques are the
gravity-gradient torque, aerodynamic torque, and magnetic
disturbance. e gravity gradient torque is one of the largest
sources of disturbance that would aect the low earth orbit

Mathematical Problems in Engineering
satellite. In orbit, any object which is nonsymmetrical with
nite dimensions will be subjected to a gravitational torque
due to the variation in the Earth’s gravitational force over the
object. e gravity-gradient torque act on the satellite can be
expressed as follows:
𝜏𝑔𝑔 =3
r𝑠
3r𝑠×Ir𝑠, ()
where is the earth’s gravity constant and r𝑠is the location of
the satellite mass center relative to the earth center in body
frame [,]. For the microsatellite operation, the gravity-
gradient torque is computed. e magnitude is of the order
−7 Nm.
e interaction of the upper atmosphere with the surface
of satellite will produce a torque about the center of mass. e
aerodynamic torque is given by the following equation:
𝜏ad =6
𝑘=1
r𝑘×fad,𝑘 ()
with
fad,𝑘 =
1
2𝑑2𝑘n𝑘⋅
k
k,n𝑘⋅
k>0
0, n𝑘⋅
k≤0. ()
In the above, as the microsatellite is of rectangular shape,
there are six surfaces that need to be considered. e location
of the th plate is denoted by r𝑘. e corresponding force due
to the impact of molecules on the surface is denoted by fad,𝑘.
is force component is a function of the drag coecient
𝑑, atmospheric density , magnitude of the translational
velocity of the satellite ,areaoftheplate𝑘,unitnormal
vector of the surface n𝑘,andtheunitvectorofthevelocity
vector
k. e magnitude of the aerodynamic torque acting on
the microsatellite is computed to be of the order −8 Nm.
Finally, magnetic disturbance torques result from the
interaction between the satellite’s residual magnetic eld and
the earth geomagnetic eld. e dominant source of the
residual magnetic eld is the spacecra magnetic moments.
is instantaneous magnetic disturbance torque due to the
spacecra eective magnetic moment and the geocentric
magnetic eld can be described as follows [–]:
𝜏mag =m×bbody,()
where mis the sum of the internal residual magnetic dipole
moment and bbody is the geomagnetic ux intensity in body
frame.
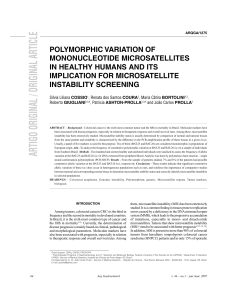
e magnetic eld of microsatellites in orbit coordinates
frameisasshowninFigure.
3. Attitude Control
Attitude control is the process of changing the orientation of
satellite. is process is vital because a satellite will always
experience internal and external disturbance torques. e
attitude control in microsatellite is mainly concerned about
theattitudestabilization.Approachesofattitudecontrolhave
been discussed in this.
Latitude (deg.)
80
60
40
20
0
−20
−40
−60
−80
−150 −100 −50 0 50 100 150
4
3
2
1
0
−1
−2
−3
−4
−5
(NTeslas)
Bz at alt =500km, year/month: 2011/12 ×104
Longitude (deg.)
F : e magnetic eld of microsatellites in orbit coordinates
frame.
x
z
y
F : Microsatellite geometric appearance.
3.1. Production of Satellite rust [14–16]. e satellite exer-
ciseframeisasinFigure. Four thrusters are put in -
plane, including angle, the jet moves toward − direction,
and lines to be a square distance .Fuelisputthejet-
plane distance, and +direction is toward satellite center, in
Figure .
e ,,and, respectively, represent the jet includ-
ing angle, jet relative distance, and the uncertainty of the fuel
gravity position.
e following is production 𝜏ufrom the thruster:
𝜏u=
𝑥
𝑦
𝑧
=
1×
1
2×
2
3×
3
4×
4
1
2
3
4
=
−1Δ −1Δ 1Δ 1Δ
−2Δ 2Δ −2Δ −2Δ
3Δ −3Δ −3Δ 3Δ
1
2
3
4
=𝛽u,
()

Mathematical Problems in Engineering
12
3
4
d
d
x
y
F : e geometric arrangement of the thrusters.
where
1234
=−(+)
−(+)
−(+)−(+)
(+)
−(+)(+)
(+)
−(+)(+)
−(+)
−(+)
1=−sin (+)
sin (+)
−cos (+),
2=−sin (+)
−sin (+)
−cos (+),
3=sin (+)
−sin (+)
−cos (+),
4=sin (+)
sin (+)
−cos (+),
= 1
2,
1=+,
2=−, 3=
,
1=−(+)+(++),
2=−(+)−(++),
3=1
(++),
𝑖Δ =𝑖+𝑖,=1,2,3. ()
3.2. Pulse-Width Modulation Rules [17–22]. e controller
requires a continuum of positive and negative thrust values,
which are physically impossible with the four xed thrusters.
isrequirementcanbemetbypulse-widthmodulating
the thrusters. e four thrusters span the three-dimensional
control space when generating a positive thrust along the
satellite -axis. e thruster commands are all biased upwards
so that each thruster receives a positive thrust command.
Each thruster can be commanded on for a variable time
during each control system sample period, with a resolution
ofmsec.evariablethrustlevelfromthelinearcontrol
signal is realized by turning on each thruster for less than
the full sample period, such that the impulse of the thruster
matches the commanded impulse.
Controller
ruster
PWM
Disturbance
On-time bias
Satellite
dynamics
+
−
Ts/2
−Ts/2
𝜙ref
𝜃ref
𝜑ref
Ts
Mthruster Ts
Mthruster
F : Microsatellite attitude control pulse-width modulation
block diagram.
e procedure to convert the controller to pulse-width
modulation is as follows.
() e thruster commands u.
() Convert ()from variable thrusts for the xed total
sample period to xed thrusts for variable times: on
= (sample time/thrust magnitude) ×u.
() Limit on-times to ±halfthesampleperiod.
() Compute a bias term; add the bias to all on-times such
that at least one thruster is on for the complete sample
period.
According to the PWM duty rule, the duty period can
be divided into two modulations: o-modulation and on-
modulation. In this project, an on-modulation is adopted.
Microsatellite attitude control pulse-width modulation block
diagramisasshowninFigure.Figureshows PWM
processing; from the control ow chart of pulse-width on/o
modulationalgorithm,thereisatleastonethrusterthatworks
in the o-modulation, while there is at least one thruster
that does not work in the on-modulation. In Figures and
,thruster,𝑠represents the maximum amplitude of the
thruster, sampling time.
4. Nonlinear ∞Robust Control Law
e microsatellite kinematic equation is described by
q=1
2−𝜔×𝜔
−𝜔𝑇0
0=1
2
×+0
−𝑇
𝜔=1
2(q)𝜔,()
where
(q)1
2
×+0
−𝑇
.()
In the attitude control design, it is desired that the system
is stable and the excursions of the angular rate and control

Mathematical Problems in Engineering
On-modulation
O-modulation
Mcommand
Ts/2
−Ts/2
Ts/2
Ts
Mthruster
→t
on,i
tmax =max
itmin =min
i
tbias =T
s/2 − tmax
ton,i =t
on,i +t
bias
ton,i =t
on,i −tmin
Mthruster
Ts
−→ Mcommand
ton,iton,i
F : Pulse-width on/o modulation control ow chart.
input are minimized. is motivates the use of the following
penalty function to be minimized:
z=1𝜔𝑇Δ𝜔+220
3u, ()
where 1,2,and3are weighting coecients introduced for
the trade-o between performance and control eort. e
function (0)is dened as (0)=2cos−1|0|.
e attitude control problem can then be formulated as
x=(x)+(x)+1(x)+1(x)w
+2(x)+2(x)u()
z=
(x)
u=1(x),()
where x=
𝜔𝑇𝑇0𝑇is the state xand wis the
disturbance. e ,1,and2are uncertain smooth
vector elds and mappings. Denote = −1−1,for
small perturbations; ,1,2,1,,1,and2can be
expressed as
(x)=
−−1×
(q)𝜔, 1(x)=−1
0,
2(x)=
−1
0,
1(x)=1𝑇+220,
(x)=
−−1×+−1×+−1×
0,
1(x)=
−
0, 2(x)=−1−(+)
0.
()
4.1. Nonlinear ∞Robust Control eory. Consider a non-
linear state-space system 0
=+,(a)
=,(b)
where is the state vector, is the exogenous disturbance to
be rejected, and is the penalized output signal. We assume
that (),(),and()are ∞functions and =0is the
equilibrium point of the system; that is, (0)=(0)=0.
Given a positive number >0,system(a)and(b)
has a nite 2—gain less than if, for all ∈2[0,]with
0≤<∞,
𝑇
0
()
2≤2𝑇
0
()
2. ()
Lemma 1. Assume that ()=0,1()=0,and
2()=0in ().If((),1())is zero-detectable and there
exists a positive-denite function ()such that the following
Hamilton-Jacobi partial dierential inequality holds [23–25]
𝛾=𝑇
𝑥+1
2𝑇
𝑥1
21𝑇
1−2𝑇
2𝑥+1
2𝑇
11<0()
then the system has a nite 2gain less than . Once ()is
found, the control signal ucan be synthesized as
u=−𝑇
2𝑥,()
where 𝑥=/1/2⋅⋅⋅ /𝑛𝑇.
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%