978-1-5386-7850-3/19/$31.00 ©2019 IEEE
Advanced Control of a DFIG-based Wind Power
Plant for Frequency Regulation
Mohamed Nadour*, Ahmed Essadki, Mohammed
Fdaili
Research Centre of Engineering and Health Sciences and
Technologies (STIS), High Normal School of Technical
Education (ENSET), Mohammed V University.
Rabat, Morocco
mohamed.nadour@um5s.net.ma,
ahmed.essadk[email protected],
mohamed.fdaili@um5s.net.ma
Tamou Nasser
Research Centre of Engineering and Health Sciences and
Technologies (STIS), Higher National School of Computer
Science and Systems Analysis (ENSIAS), Mohammed V
University
Rabat, Morocco.
tamounasser@gmail.com
Abstract—the expansion of renewable power penetration in the
power system has given rise to many concerns in terms of
frequency stability. Since unlike the conventional synchronous
generators, these intermittent energy sources do not inherently
undertake frequency regulation. For instance, The Doubly-fed
induction generator (DFIG) based wind power plants have a
destitute response to frequency deviations, being that its rotational
speed is almost totally disassociated from the grid frequency.
Another point is that significant wind power penetration leads to
the retirement of many conventional power plant. Which lowers
the power system’s total inertia and the power reserves that are
normally needed to preserve the frequency within an adequate
range of variation. Therefore, this paper proposes an advanced
control strategy that allows of the DFIG based wind energy
conversion system to provide, at the event of frequency excursion,
an inertial support for the power system through a simultaneous
use of the kinetic energy reserved in the turbine rotating masses
and a portion of the energy reserved in the DC-link capacitor. A
case of four synchronous generators SGs connected with a DFIG
bases wind farm WF considering a sudden frequency disturbance
has been studied using Matlab/Simulink to validate the capability
of the suggested control strategy.
Keywords- Wind Turbine; DFIG; Frequency control; MPPT;
Backstepping; DC-link.
I.
I
NTRODUCTION
In last few decades, thanks to the recent development in the
field of power electronics, machines and systems control, wind
power generation has experienced a significant growth
compared to others renewables energy conversions systems.
However, as this type of power generation continue flourishing
worldwide and as we keep on increasing its power penetration
in the system, the electrical network will have to face multiple
stability challenges, such as frequency excursions. Since, unlike
the conventional synchronous generators that are naturally
designed to provide a response to frequency deviations (a
release or absorption of kinetic energy) [1]. The wind energy
conversion system does not possess this inherited response to
help the system in arresting the frequency decay, being that its
rotational speed is almost totally dissociated from the frequency
of the network by the presence of the power electronic interface
that is normally controlled only to ensure a maximum wind
power extraction. Moreover, an increase of the wind power
penetration will minimize the total equivalent inertia of the
power system by leading to the withdrawal of more and more
traditional generation plants. Which actually present the units
that are taking almost all the responsibility in maintaining the
frequency within an acceptable range of a very small variation.
This problem is recognized and significantly discussed over
the past few years. Some works have proposed the utilization of
the turbine kinetic energy to support the system in frequency
regulation during transient [2]. While others, have suggested
operating the wind turbine following a de-loaded operation
characteristic instead of the maximum power point tracking
MPPT characteristic [3]. In order to create a certain power
reserve, using either the pitch or the mechanical speed control,
which can automatically be activated to support the system right
after the detection of a frequency deviation. However, this
strategy lowers noticeably the energy yield, which may require
monetary compensation for the wind power plant owner.
Moreover, [4] have proposed a coordinated control strategy
using both of the previous methods to enhance the WT response
to frequency excursions.
This paper, proposes an advanced (rotor and grid side RSC
GSC converters) control strategies of the DFIG bases wind
turbine. Allowing the system to provide an artificial inertial
support to the power system at the event of a frequency
deviation, by a simultaneous release of the kinetic energy store
in the turbine rotating masses and a portion of the energy stored
in the DC-link capacitor with respect to some system stability
concerns. The case of four synchronous generation units
(representing the electrical grid) connected to a DFIG based
wind farm considering a sudden change in the load, hence,
frequency disturbance is studied. The simulation results in
Matlab/Simulink environment show the validity of the
suggested control strategy in terms of tracking behavior and

supporting the system during transient by bringing the
minimum frequency up to a level where we have a 0% wind
power penetration in the system.
Section II gives a description of the aerodynamic model of
the wind turbine and the DFIG. In section III and IV, the
operation and control of wind turbine presenting both inertial
support (KE and DC-link) strategies . Section V, simulation
results are presented and discussed. Then, the conclusion.
Figure 1. Studied System
II. D
YNAMIC MODEL OF THE SYSTEM
A. Wind Turbine Model
The aerodynamic power extracted by the wind turbine can
be expressed as follows [5]:
() ()
3
ap wind p w
1
PC ,P C , Sv
2
=λβ⋅ =⋅λβ⋅ρ
(1)
With, S the surface of the area swept by the rotor blades,
being the air density, v the wind velocity and
is the wind
turbine power coefficient, it is a proportion of the angle of
blades and λ the tip speed ratio given by the following formula:
t
w
R
v
⋅Ω
λ=
(2)
The power coefficient has been approached in this work by[6]:
22
p
134
3
55
6
3
B 0.0035 B
CB B B
0.008 1
B0.0035B
exp B
0.008 1
⋅
=−−β−
λ+ β β+
⋅
⋅−+λ
λ+ β β+
(3)
B
= 0.5109 ,B
= 116 ,B
=0.4,B
=5, B
=21 and B
=
0.0068.
The aerodynamic torque
is obtained from
by:
()
3
a
ap
tt
PSv
CC,
2
ρ
==λβ⋅
ΩΩ
, (4)
Neglecting the energy losses. The gearbox that is placed to
adapt the mechanical speed of the turbine’s rotor to that of the
generator can be modelled using G a gain ratio as follows:
mec t a g
GCGCΩ=⋅Ω =⋅
(5)
Finally, the fundamental equation of dynamics:
mec
gem mec
d
JCCf
dt
Ω=− −⋅Ω
, (6)
J is the generator inertia, f the coefficient that represents the
frictions, Cg the mechanical torque of the turbine and Cem is
the electromagnetic torque of the doubly fed induction
generator.
B. DFIG Modelling
The DFIG based wind turbine is most popular application
among the wind energy conversion technologies. That is due to
its high-energy conversion efficiency, small power electronic
interface that carried only a third of the DFIG rated power, wider
range of operation, which means a low mechanical stress, and a
separately and easily controllable active and reactive power. It
is basically an induction generator, with stator windings directly
linked network, and rotor windings linked through a back-to-
back converter that consists of a two converters (one on the rotor
side RSC and the other on the grid side GSC) parted by a DC-
link capacitor Fig.1. The DFIG model can be determined using
the following dynamic equations [7]:
sd
sd s sd s sq
sq
sq s sq s sd
rd
rd r rd r rq
rq
rq r rq r rd
d
VRi dt
d
VRi dt
d
VRidt
d
VRidt
Ψ
=− × + −ω ×Ψ
Ψ
=− × + +ω ×Ψ
ϕ
=− × + −ω ×Ψ
ϕ
=− × + +ω ×Ψ
sd s sd rd
sq s sq rq
rd r rd sd
rq r rq sq
Li Mi
Li Mi
Li Mi
Li Mi
Ψ=− × − ×
Ψ=− × − ×
Ψ=− × − ×
Ψ=− × − ×
(7)
Where,
,
,
,
,
,
are respectively the stator and the
rotor currents (A), voltages (A), and fluxes (Wb).
,
(rad/s)
being the angular speeds of the rotating fields associated to the
stator and the rotor.
,
,
,
are the stator and rotor
inductances and resistances,
is the mutual inductance.
The active P
s
and reactive Q
s
powers as well as electromagnetic
torque can be given by, with p being the pair of poles:
{}
()
{}
()()
s e s s sd sd sq sq
em sq rd sd rq
s
s m s s sq sd sd sq
PRvi vi vi M
Cp i i
L
QIvi vi vi
==+
=Ψ−Ψ
==−
(9)
III.
B
ACKSTEPPING CONTROL OF THE DFIG
A. RSC control using backstepping
By neglecting the stator DFIG resistance R
s
, which is an
acceptable assumption for high and medium induction
machines [5] and aligning the stator flux on the d axis of the
park reference frame (such that
sd
=
s
and
sq
=0) we can
achieve an separate control over P
s
and Q
s
. Accordingly, the
DFIG model it becomes approximately dissociated in two
subsystems and
can now be represented as differential
equations
, such that [5]:

s
ssrqrrqsrd
ss
s
rq rq r rq s rd
s
1s
MV
M
Pv (VRIgIg )
LL
MV
1
I(VRIgIg)
L
zP
•
•
=− + + ωΔ −
Δ
=− + + ωΔ −
Δ
=
(10)
srdrrdsrq
s
s
rd rq r rd s rq
2s
M
Qv (VRIgI)
L
1
I(VRIgI)
zQ
•
•
=− + − ωΔ
Δ
=− + − ωΔ
Δ
=
(11)
Where:
2
rr
s
M
L(L )
L
Δ= σ= −
In order to improve and the performance of the overall
system and the stability against parametric uncertainties, a
backstepping control approach was used. This control
methodology that is based on Lyapunov second method (which
is a powerful tool used to pronounce on dynamic systems
stability), it allows the decomposition of nonlinear complex
control scheme into smaller steps, using the so-called virtual
control. So that every step produces a reference for the
following one.
The block diagram of the RSC control design is
shown in Fig. 2. The blocks ‘‘I
rq-c
computation’’ and ‘‘I
rd-c
computation’’ provides the currents of the rotor references (the
virtual control variables) via a feedback control of the the active
and the reactive powers Eq.12.
()
ss
sref
rq ref 1 1 rq s rd
sr r s
s
rd ref 3 3 rd s rq
sref
sr r
LvM
1
IPkeVgIg
vMR R L
L1
IQkeVgI
vMR R
•
−
−
•
−−
Δ
=+⋅−+ωΔ⋅−
Δ
=+⋅−−ωΔ⋅
(12)
Where k
i
are the backstepping setting coefficient and e
i
the
errors variables.
Moreover, ‘‘V
rq-c
computation’’ and ‘‘V
rd-c
computation’’ blocks generate the actual control variables via
the rotor currents feedback control (13).
Figure 4. RSC control
()
sr s
rq ref
rq C 2 2 1 r rq s rd
ss
sr
rd ref
rd C 4 4 3 r rd s rd
s
vMR vM
VkeI eRIgIg
LL
vMR
VkeI eRIgI
L
•
−
−
•
−
−
=− − − Δ− +ωΔ +
Δ
=− − − Δ− −ωΔ
Δ
(13)
B. GSC control using backstepping
The GSC control scheme is based on voltages orientation such
that (V
sd
=0 and V
sq
=V
s
). The active and reactive power traded
through the RL filter Figure 1. can be represented as differential
equations such that [8]:
s
ttq t tq t s td s
t
tq tq t fq t s fd s
t
1t
v
P (VRIL IV)
L
1
I(VRILIV)
L
zP
•
•
=−−ω⋅−
=−−ω⋅−
=
(14)
s
td t td t s tqt
t
tq td t td t s tq
t
2t
v
Q(VRILI)
L
1
I(VRILI)
L
zQ
•
•
=−+ω
=−+ω
=
(15)
The block diagram of the GSC control design is shown in Fig
3. The control scheme has four blocks. Two blocks ‘‘I
tq-c
computation’’ and ‘‘I
td-s
computation’’ provides respectively the
rotor currents references components (known in backstepping
theory as virtual control variables) via feedback control of the
filter’s active P
t
and reactive Q
t
powers Eq. 16. In addition,
another two blocks ‘‘V
rq-c
computation’’ and ‘‘V
rd-c
computation’’
that generate the actual control variables (voltages) via the rotor
currents feedback control Eq.17.
()
()
ttref
tq ref 1 1 tq f s td s
ts
t
tq ref 3 3 td t s tqtref
ts
L
1
IPkeVLIv
RV
L
1
IQkeVLI
RV
•
−
−
•
−−
=−−+−ω−
=−−+−ω
(16)
()
()
s
tq ref
tq C 2 2 1 t t tq t s td s
t
s
td ref
td C 4 4 3 t t td t s tq
t
v
VkeI eLRILIv
L
v
VkeI eLRILI
L
•
−
−
•
−
−
=− − + − + ω +
=− − + − − ω
(17)
Figure 5. GSC control

IV.
SYNTHETIC
INERTIA
During normal operation, the wind turbine operate in order
to produce the maximum power from the wind velocity (using
traditional MPPT algorithms), which makes it insensitive to
frequency deviations due to the rapid responses of the power
electronic interface. Moreover, DC-link is normally controlled
to maintain a constant voltage between the armatures of the
capacitor. Thus, conventional DFIG-based wind turbine does
not have any response during a frequency disturbance [2].
A. Inertial support from the WT kinetic energy
This additional control loop sets the active power reference
for the RSC Figure 4, it allows the DFIG based wind turbine to
provide an inertial active power support for the power system
for a short term duration, at the event of frequency excursion. It
consists on customizing the electromagnetic torque reference as
function of the derivative of the measured frequency
f
(also
known as the rate of change of frequency ROCOF). For
instance, when the frequency drops, the torque set point rises
causing a deceleration of the mechanical speed of the wind
turbine, hence, the extraction of a part of the kinetic energy
reserved in the rotating masses. The new reference of the power
can be written as follow[9][2]:
WT ref in MPPT
PPP
−
=Δ +
(18)
Where, P
MPPT
is the maximum extractible power from the
wind (using MPPT algorithm), ΔP
in
the inertial support using
the additional control loop and P
WT-ref
is the new active power
reference for the DFIG based wind turbine. Moreover, the
response of the artificial inertial control loop is chosen
equivalent to that of a traditional generator given by (19).
p
u
syn pu
df
P2H f dt
Δ= ⋅
(19)
Hence:
p
u
in in pu
df
P2Hfdt
Δ= ⋅
(20)
The previous equation represent the amount the released
kinetic energy. Where, f
pu
is the system frequency per-unit and
H
in
is the wind turbine inertia constant given by the [1]:
2
nomin al
in
no min al
J
1
H2P
Ω
=
(21)
From (20) we can determine the new set point of the
electromagnetic point Figure. 6, which is proportional to the
derivative of the frequency (ROCOF) such that:
pu
em in pu
mpu
df 1
C2Hf
dt
−
−
Δ=⋅ Ω
(22)
Thus:
em ref em MPPT em in
CC C
−− −
=+Δ
(23)
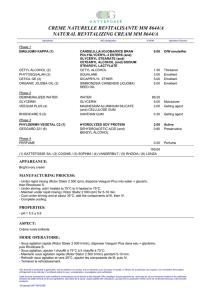
A phase locked loop synchronization is used to estimate the
electrical network frequency. A low pass filter is used to
minimize the noises impact Figure 6. With Ki is the parameter
that determines the desired quantity if the additional power and
Ti is a time constant chosen depending on the performance of
the equipment about 100ms [high].
Figure 6. Block diagram of the WT inertial support
B. Inertia support from the DC-link
This control loop provides the reference of the active
power for the GSC Figure 6. Neglecting the energy losses, the
DC-link voltage reflects the balance between the power
transmitted through the GSC to the grid P
gsc
and the power
injected to the RSC P
RSC
.[8].
dc
C GSC RSC pudc pudc
dU (t)
d1
P P P C .U (t) C .U (t)
dt 2 dt
=−= =
(24)
Where P
C
is the active power stored in the DC capacitor and:
2
DC no min al
pu
CV
CS
−
= (25)
Where C
p.u
is the per-unit total capacitance and S is the
rated (power system based). Using the same analogy as for the
inertial support from the wind turbine kinetic energy, the
inertial support using the DC-link voltage is chosen to emulate
the response of a traditional synchronous generators given by
Eq.19 such that:
p
u
dc
pu dc DC pu
df
dU (t)
C.U(t) 2H f
dt dt
=⋅
(26)
H
DC
is the artificial inertia constant provided by the capacitor.
If we integrate in both side of (26), we have:
()
()
22
dc dc0 22
p
uDCpupu0
UU
CHff
2
−
=⋅− (27)
Where f0 and Udc0 are the per unit nominal Dc-bus voltage and
nominal frequency respectively. For stability reasons, the DC-
bus voltage will be maintained within a range of a small
variation, we set the constraint such as
±
0.1pu. Moreover, a
linearization of (27) around its equilibrium point leads to:
p
u dc0 dc DC pu0 pu
CU U 2H f f⋅⋅Δ= ⋅⋅Δ
(28)
From (28) we can determine the additional control loop:
dc DC pu dc0
UK fU=⋅Δ+
(29)
With:

()
()
DC DC 0 pu dc0
K2HfCU=⋅ ⋅
(30)
Where, KDC is the parameter that determines the quantity of
power discharged from the DC-link with respect to the stability
constraint. Note that, the installation of a super capacitor can
significantly improve the inertial response from the DC link
using the same control principle. The block diagram of the
inertia support is illustrated in Fig 7.
Figure 7. Block diagram of the DC-link inertial support
V.
S
IMULATION RESULTS
To examine the performance of the additional control
strategy, a small power system was simulated. Which contains
static loads, four conventional synchronous generators, and
DFIG-based wind power farm. Each generator has a power
rating S, an inertia constant H and a droop coefficient R. All the
generators are represented by a single equivalent generator
driven by the mechanical outputs of the individual turbines, and
assumed to be operating with primary frequency regulation and
without the secondary frequency controller, such that:
() ()
()
()
00
sys p eq p
0
eq
0
sys eq
pp
nH S
H1LH1L
nS
R
R
RRn1L 1L
=−=−
== =
⋅− −
(24)
Where, Lp % is the wind power penetration. The studied system
(with characteristics presented in Appendix) and its control
using backstepping strategy was simulated in Matlab/Simulink
environment. the simulation is run with a constant wind profile
that varies of 9 m/s for a 50 sec duration. To evaluate the
frequency response characteristic of the isolated power system,
a step perturbation in load of 0.1pu is applied at 10sec.
Figure 8. Rotational speed of the DFIG
At the presence of the fault at t=10sec, the electromagnetic
set point increases by the quantity determined by Eq.22
proportional to the derivative of the measured frequency. Which
leads to a deceleration mechanical speed as shown in Fig 8.
Allowing the DFIG based wind turbine to rise the production
by extracting a part of the kinetic energy reseved in the turbine
rotating masses Fig 9. The additional power will help the
system in contacting the frequency deviation during transient.
At the steady state, the frequency stabilizes (note that the
system is operating with only primary frequency regulation and
without an automatic generation control AGC), and the active
power return to its reference.
Figure 9. Active power generated by the DFIG-based wind turbine
Figure 10. DC-link voltage
Moreover, at the event of the frequency deviation, the DC-
link voltage reference decreases to extract a portion of the
energy stored in the capacitor Figure 10. The good choice of the
parameter K
DC
allows the voltage to remain within its
limitation.
Figure 11. Network frequency for different wind
power penetration WPP with and without the frequency
dependent active power support from the WF.
Figure 11 shows the maximum short term frequency
deviation from its rated value for various wind power
Time (seconds)
0 102030405060
0.8
0.85
0.9
0.95
1
1.05
1.1
Fault
 6
6
1
/
6
100%