Techniques de Classification : K-Moyenne, DBSCAN

Techniques de
Classification
Classification
Lotfi Ben Romdhane, Ph.D.
DSI / ESST / US/
Tn
DSI / ESST / US/
Tn
Sommaire
• Introduction
•
Classification hiérarchique
2
•
Classification hiérarchique
• Méthodes de partitionnement
▫ K-Moyenne
▫ FCM
•
Classification par densité
•
Classification par densité
▫ DBSCAN
• Discussion
Introduction (1)
•
Plusieurs noms:
clustering
, classification,
3
•
Plusieurs noms:
clustering
, classification,
classement, ...
• Un ensemble de méthodes permettant de créer
des groupes à partir d’un ensemble de données
tels que:
▫ les données qui appartiennent au même groupe
sont
similaires
sont
similaires
▫ les données appartenant à des groupes différents
sont dissimilaires
Introduction (2)
• Plusieurs applications en
pratique
4
pratique
•Les données de puces ADN
▫ les gènes qui sont similaires
admettent dans l’organisme
des fonctions identiques
•Compression des données
▫ Les données qui se trouvent
dans un groupe sont
dans un groupe sont
similaires et peuvent être
remplacée par une seule
valeur

Introduction (3)
•Segmentation des Images:
diviser une image en un ensemble
5
diviser une image en un ensemble
de régions homogènes
▫Compression des images pour la
transmission: représenter
chaque région par un seul point
(pixel)
▫Reconnaissance des formes:
appariement d’une forme (par
exemple le visage d’une
exemple le visage d’une
personne) avec les régions de
l’image (ensembles des visages
dans l’image)
Introduction (4)
Hiérarchiques Bottom-Up
6
Méthodes de
classification
Top-Down
Partitionnement K-Means
FCM
Basées sur la
densité DBSCAN
Formulation du problème (1)
•
On considère
D = {X
1
, X
2
, …,
X
n
}
un ensemble
7
•
On considère
D = {X
1
, X
2
, …,
X
n
}
un ensemble
de n points (données)
•Xi= {xi,1, xi,2, …, xi,l}une donnée vecteur de
dimension l, c'est-à-dire possédant l attributs
participant à sa définition
• Soit dist une mesure de distance
Formulation du problème (2)
•
La classification consiste à trouver un ensemble
8
•
La classification consiste à trouver un ensemble
de groupes {C1,C2, …, Cc}; dits aussi clusters;
tel que la distance entre des données du même
groupe est plus petite que la distance entre deux
données appartenant à deux groupes différents
(
)
(
)
D
x
x
x
x
x
dist
x
x
dist
∈
∀
<
/
,
,
;
,
,
(
)
(
)
{ }
mkmji
kjikiji
CxCxx
D
x
x
x
x
x
dist
x
x
dist
∉∧∈
∈
∀
<
,
/
,
,
;
,
,

Formulation du problème (3)
• Une distance défini sur un ensemble E est une
application :
d
:
E
×
E
→ℜ
+
possédant les
9
application :
d
:
E
×
E
→ℜ
+
possédant les
propriétés suivantes
▫Symétrie
▫
Séparabilité
),(),(;, xydyxdEyx
=
∈
∀
y
x
y
x
d
E
y
x
=
⇔
=
∈
∀
0
)
,
(
;
,
▫
Séparabilité
▫Inégalité triangulaire
y
x
y
x
d
E
y
x
=
⇔
=
∈
∀
0
)
,
(
;
,
),(),(),(;,, zydyxdzxdEzyx
+
≤
∈
∀
Formulation du problème (4)
•Distance Euclidienne
10
•Distance de Manhattan
( )
∑
=
−=
l
kkjkiji
xxXXdist
1
2
,,
),(
∑
=
−=
l
kkjkiji
xxXXdist
1,,
),(
Formulation du problème (5)
•
Distance Edit
11
•
Distance Edit
▫nombre d’opérations élémentaires (insertions,
suppression, …) pour changer un objet (chaîne de
caractères, graphe) vers un autre
•Distance de Jaccard (pour les ensembles)
BA
BABA
BAdist ∪∩−∪
=
2
),(
12
Classification
hiérarchique

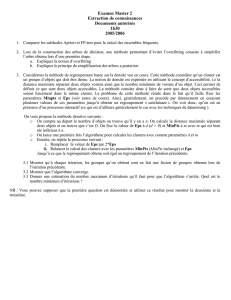
Notions de base (1)
• La classification hiérarchique permet de
produire une
hiérarchie de groupes
13
0.2
produire une
hiérarchie de groupes
▫ chaque niveau de la hiérarchie représente un
partitionnement différent
▫ peut-être modélisé à l’aide d’un arbre hiérarchique
appelé dendrogramme
6
5
1 3 2 5 4 6
0
0.05
0.1
0.15
1
2
3
4
5
6
1
2
3 4
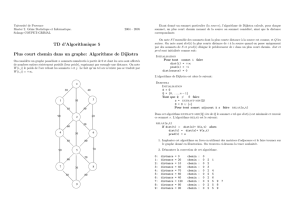
Notions de base (2)
•
La coupure du dendrogramme à un niveau
14
•
La coupure du dendrogramme à un niveau
particulier génère un partitionnement différent
0.1
0.15
0.2
1 3 2 5 4 6
0
0.05
Partitionnement = { {x1, x3} ; {x2, x5} ; {x4} ; {x6} }
Notions de base (3)
•
Le dendrogramme peut
-
être généré selon deux
15
•
Le dendrogramme peut
-
être généré selon deux
approches différentes
•approche ascendante (bottom-up)
▫ dite aussi agglomérative
▫ partir d’un partitionnement dans lequel chaque
donnée forme un groupe à part
▫
à chaque étape (niveau du dendrogramme),
▫
à chaque étape (niveau du dendrogramme),
fusionner les deux groupes les plus proches
▫ s’arrêter lorsqu’on obtient un seul groupe
Notions de base (4)
•
approche descendante (top
-
down)
16
•
approche descendante (top
-
down)
▫ dite aussi divisive
▫ partir avec un seul groupe contenant toutes les
données
▫
à chaque étape, diviser le groupe
le plus mauvais
▫
à chaque étape, diviser le groupe
le plus mauvais
▫ s’arrêter lorsqu’on obtient chaque donnée est dans
un groupe à part

Distance (1)
•
Une question qui se pose :
comment mesurer la
17
•
Une question qui se pose :
comment mesurer la
distance entre les groupes ?
▫single-linkage : MIN
dist(g1,g2) = points
les plus proches
Distance (2)
▫complete-linkage : MAX
18
dist(g1,g2) = points
les plus éloignés
Distance (3)
▫average-linkage : MOYENNE
19
dist(g1,g2) =
moyenne des
distances
Distance (4)
▫centroid-linkage : centre des classes
20
définir le centroide de chaque groupe (moyenne des
données qu’elle contient)
prendre la distance entre les centroides
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%