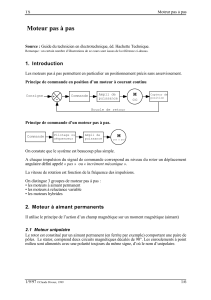
Banc d'essai pour moteurs à pas hybrides - Mémoire d'électrotechnique
Telechargé par
rayane ahmed

Développement d’un Banc d’essai por l’étude est le diagnostic des moteurs à
pas Hybrides
République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
Université de Tébessa
Faculté des Sciences et de Technologie
Département de Génie Electrique
Mémoire de Fin d’Etudes pour l’obtention du Diplôme de Master en
Electrotechnique
Thème
Présenter par :
Djedouani. Belal
Ould amhed haiballa mohamed lemine
Devant le jury de soutenance
Mr. Guiza Douadi Présidente
Mr. Makhlouf Med Abderraouf Examinateur
Dr. Maamri mahmoud Rapporteur
Promotion 2015 / 2016

Remercîment
Je tiens à remercier tout premièrement Allah le tout puissant pour la volonté,
la santé et la patience, qu'il m’a donné durant toutes ces longues années.
Ainsi, je tiens également à exprimer mes vifs remerciements à mon encadreur Dr.
MAMMRI mahmoud pour avoir d'abord proposée ce thème, pour le suivi continu
tout le long de la réalisation de ce mémoire et qui n'a pas cessée de me donner ses
conseils.
Je tiens à remercier les membres du jury pour leur présence et patience pendent
la présentation de ce travail et leur critique constructive.
Je tiens à remercier vivement touts les enseignants et employés du département
de génie électrique à l’université de Tébessa pour touts leurs aides et services qu’ils
m’ont octroyé tout le long de mon parcours universitaire.
Djedouani belal
Ould Ahmed ould haiballa Mohamed lemine

Dédicace
Je dédie ce Modest travail :
À tous mes frères et sœurs.et a tous la famille
DJEDOUANI.
Et toutes mes amies et mon binôme Med
lamine,
Et à mes collages électrotechniques.
Et toutes les personnes qui m’ont aidées et a
surtout a tous les gens que je n’ai pas cité, ils
resteront toujours dans mon cœur.
Djedouani .Belal

Liste des figures
Numéros
Titres de figures
Pages
Chapitre I
1
flux induit de moteur pas à pas à pas
4
2
position de moteur pas à pas
4
3
positon 1
5
4
positon 2
5
5
positon 3
5
6
positon 4
6
7
chronogramme des étapes de moteur pas à pas
6
8
moteur pas a pas à aimant permanent
8
9
moteur pas à pas Réluctance variable
9
10
Structure d’un moteur pas à pas (montage bipolaire)
10
11
Structure d’un moteur pas à pas (montage unipolaire)
12
12
bobinage du moteur bipolaire
12
13
bobinage du moteur unipolaire
13
14
principe d’un moteur pas à pas
13
15
Le fonctionnement du 3 type moteur
14
16
couple maxi en fonction de la fréquence des pas
14
17
le couple des pas
15
18
le chronogramme de courant dans le bobine
16
19
schéma principe de moteur unipolaire
17
20
chronogramme de séquenceur
18
21
Schéma principe comment installer l’horloge dans la carte
19
22
Schéma principe de l’horloge
19
23
Schéma principe de l’horloge
20
Chapitre II : moteur pas à pas hybride
1
Moteur pas à pas hybride en fonctionnement
22
2
Fonctionnement du moteur pas à pas hybride
22
3
Moteur pas à pas hybride4 fils
24
4
Moteur pas à pas hybride 6 fils
25
5
Moteur pas à pas hybride8 fils
25
6
Moteur hybride (MH)
26
Chapitre III : partie pratique
1
carte de moteur pas à pas unipolaire
30
2
carte de moteur pas à pas bipolaire
31
3
Enroulements des moteurd à pas
31
4
Bord d’assemblage de la carte
32
5
contrôle de la vitesse par VR1 et VR
32
6
fixation du capteur angulaire sur l’arbre du moteur
33
7
schéma diagnostique de la carte de MH
37
8
Ph1 off
38
9
Ph2off
38
10
Ph3off
38

11
Ph4off
38
12
Ph1on
38
13
Ph2on
38
14
Ph3on
39
15
Ph4pn
39
16
Ph1off ph2off
39
17
Ph3off ph4off
39
18
Ph1on ph2on
39
19
Ph3on ph4on
39
20
ph1off ph3off
40
21
Ph1 off ph4off
40
22
Ph2off ph3off
40
23
Ph2off ph4off
40
24
Ph1on ph3on
40
25
Ph1on ph4on
40
26
Ph1off ph3on
41
27
Ph1off ph4on
41
28
Ph2on ph4on
41
29
Ph2on ph3on
41
30
Ph2on ph4on
41
31
Ph1off ph3on
41
32
Ph2off ph4on
42
33
3Phoff 1 phN
42
34
3Phon 1phN
42
35
Ph1 mélange ph2
42
36
Ph1 mélange ph3
42
37
Ph1 mélange ph4
42
38
Ph2 mélange ph3
43
39
Ph2 mélange ph4
43
40
Ph3 mélange ph4
43
41
Mélange ordre 2ph (1et2)
43
42
Mélange ordre 2ph (1et3)
43
43
Mélange ordre 2ph (1et4)
43
44
Mélange ordre 2ph (2et3)
44
45
Mélange ordre 2ph (2et4)
44
46
Circuit imprimé du montage
44
47
schéma de montage des straps
45
48
schéma de montage des composants
46
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
1
/
61
100%








{kind=link}
{kind=link}