Cours des sciences de l’ingénieur
Chaine d’énergie
Module A.D.C.
www.c
hari.123
.ma
Nom et prénom : …………………………….
Classe
: 2STE
…
Lycée technique Mohammedia Année scolaire : 2011-2012

L.Technique Classe : 2 STE
SI – Chaine d’énergie – unité A.D.C page 1/65 www.chari.123.ma
I. Présentation
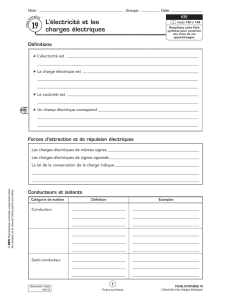
Pour agir sur la matière d'œuvre, un système automatisé a besoin d’énergie, qui subira de nombreux traitements
pour être adaptés à la nature de l'action sur la matière d'œuvre.
L’unité ADC traite donc de ces aspects qui peuvent être modélisés par les fonctions génériques qui s'appliquent
sur la plupart des systèmes ; il s'agit des fonctions :
Alimenter ;
Distribuer ;
Convertir;
Or
dres
Acquérir Traiter Communiquer
Transmettre Agir
CHAÎNE D’INFORMATION
CHAÎNE D’ENERGIE
Grandeurs
physiques,
consignes
Messages
Informations
MO
MO+VA
Unité ADC
Alimenter
Distribuer
Convertir
- Système triphasé
- Postes de transformation
- Transformateurs
- Protection des biens et des
personnes
-Convertisseurs statiques :
Redresseurs
Onduleur monophasé
Gradateur
- Variateurs industriels pour
- Moteur asynchrone
- Distributeur proportionnel
- Machine synchrone
- Moteur asynchrone
- Moteur pas à pas
-Vérins
CHAINE D’ENERGIE : UNITE A.D.C.

L.Technique Classe : 2 STE
SI – Chaine d’énergie – unité A.D.C page 2/65 www.chari.123.ma
Réseau triphasé équilibré
Définition
Un système triphasé est un réseau à trois grandeurs (tensions ou courants) sinusoïdales de même fréquence et déphasées,
les unes par rapport aux autres, d’un angle de 120°. Le système est équilibré si les grandeurs sinusoïdales sont de même
valeur efficace. Il est direct si les phases sont ordonnées dans le sens trigonométrique et inverse dans l'autre cas.
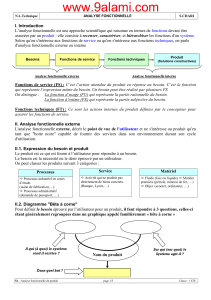
Tensions délivrées
1
2
3
N
V
1
V
2
V3
U
12
U
23
U
31
Représentation temporelle de ces tensions
Tensions simples
Ce sont les d.d.p entre les divers conducteurs de phase et de point neutre (réel ou fictif) : v1, v2,v3.
Ecriture temporelle Ecriture complexe (polaire)
v
1
(t) = V √2 sin (ωt) V
1
= [ V , 0°]
v
2
(t) = V √2 sin (ωt-2π/3) V
2
= [V , -120°]
v
3
(t) = V √2 sin (ωt- 4π/3) V
3
= [V, -240°]
Tensions composées
Ce sont les d.d.p entre les conducteurs des phases consécutives: U12,U23,U31. Voici le détail du calcul pour la tension U12 :
U12 =V1-V2 = [ V√3, + π/6 ].
En effectuant les mêmes opérations pour les autres tensions
Ecriture complexe (polaire) Ecriture temporelle
U12 =V1-V2 = [V√3, + 30°] u12(t) = V√3√2 sin (ωt+ π/6)
U23 =V2-V3= [V√3, - 90°] u23(t) = V√3√2 sin (ωt- π/2)
U31 =V3-V1 = [V√3, + 150°] u31(t) = V√3√2 sin (ωt- 7π/6)
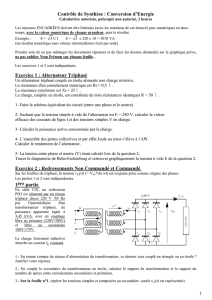
Représentation vectorielle de Fresnel des tensions
A partir des expressions définies précédemment, il est possible de représenter les différentes tensions. La
représentation vectorielle de Fresnel des tensions :
V
1
V3
V
2
-2
/3
U12
U
23
U
31
Origi
ne des
phases
U
120°
V
30°
Triangle des tensions
FONCTION ALIMENTER : SYSTEME TRIPHASE

L.Technique Classe : 2 STE
SI – Chaine d’énergie – unité A.D.C page 3/65 www.chari.123.ma
Remarque :On voit ainsi apparaître un nouveau système de tensions triphasées : u12,u23,u31.
La relation qui existe entre l'amplitude V et U se calcule facilement à partir du triangle des tensions
:
2.V.cos(/6) = U c'est à dire : U= 3.V
Ainsi, un système triphasé à basse tension sur le réseau est intitulé : 220V/380V, 220V représentant la tension simple
efficace et 380V la tension composée efficace.
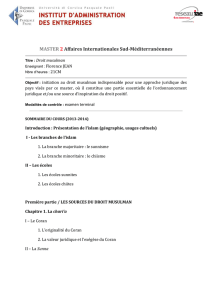
Récepteurs triphasés équilibrés
Définitions
Récepteurs triphasés : ce sont des récepteurs constitués de
trois éléments identiques, d’impédance Z.
Equilibré : car les trois éléments sont identiques.
Courants par phase : c’est le courant qui traverse les éléments
Z du récepteur triphasés. Symbole : J
Courants en ligne : c’est le courant dans les fils du réseau
triphasé. Symbole : I
Le réseau et le récepteur peuvent se relier de deux façons
différentes : en étoile ou en triangle.
Récepteur
j
1
Z
1
i
1
Z
2
Z
3
j
2
j
3
i
2
i
3
N
Réseau
Couplage étoile
Montage
j
1
Z
1
i
1
Z
2
Z
3
j
2
j
3
i
2
i
3
N
v
1
v
2
v
3
Même branchement représenté de deux façons
différentes. Le premier schéma explique le terme
«étoile».
v1
v2v3
i1
i
2
i3
Comme il s’agit des mêmes impédances, de ce fait
i1+ i2+ i3= 0, donc iN= 0.
Le courant dans le fil neutre est nul. Le fil neutre n’est
donc pas nécessaire.
Pour un système triphasé équilibré, le fil neutre ne sert à
rien.
j
1
Z
1
i
1
Z
2
Z
3
j
2
j
3
i
2
i3
N
v
1
v
2
v
3
Fil neutre est
supprimé
Relations entreles courants
On constate sur les schémas précédents que les courants en ligne sont égaux aux courants par phase.
i1= j1; i2= j2; i3= j3
De plus la charge et le réseau sont équilibrés, donc : I1= I2= I3= I = J
On retiendra pour le couplage étoile : I = J
FONCTION ALIMENTER : SYSTEME TRIPHASE

L.Technique Classe : 2 STE
SI – Chaine d’énergie – unité A.D.C page 4/65 www.chari.123.ma
Couplage triangle
Montage
Z
Z
Z
j1
j
2
j3
i1
i2
i3
u12
u
23
1
2
3
Comme il s’agit des mêmes impédances, i1+ i2+ i3= 0
et j1+ j2+ j3= 0
Ici en aucun cas le fil neutre n’est nécessaire.
3
u
12
u
23
u
31
j
1
j
2
j
3
i
1
i
2
i
3
1
2
Relations entreles courants
D’après les schémas du montage triangle :
i1= j1- j3=> I1= J1- J3
i2= j2- j1=> I2= J2- J1
i3= j3- j2=> I3= J3- J
Le système triphasé est équilibré : I1= I2= I3= I
et J1= J2= J3= J.
Pour le couplage triangle, la relation entre Iet Jest la même que la
relation entre V et U.
Pour le couplage triangle : I = √3 J
Réseau triphasé déséquilibré
Un récepteur est non équilibré s’il est constitué de trois impédances différentes Z1,Z2et Z3, couplées en étoile ou
en triangle.
Couplage étoile avec neutre
On détermine la somme des trois courants en ligne, c'est à dire le
courant dans le neutre, dans la charge étoile déséquilibrée :
Cette somme n'est plus nécessairement nulle : Un courant circule
dans le conducteur de neutre. IN ≠ 0
Z
1
1
i
1
Z
2
2
Z
3
3
i2
i
3
N
v
1
v
2
v
3iN
Couplage triangle
On détermine les courants I1,I2et I3à partir des courants J1,J2et J3calculés par :
i1= j1- j3=> I1= J1- J3
i2= j2- j1=> I2= J2- J1
i3= j3- j2=> I3= J3- J2
La relation I =√3 J n’est plus valable car le système est déséquilibré.
V1
Z1+V2
Z2+V3
Z3
IN= I1+ I2+ I3=
FONCTION ALIMENTER : SYSTEME TRIPHASE
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%