I) MATERIEL : LVH 16-17 TP de Physique, série 1

LVH 16-17 TP de Physique, série 1 PSI
TP2 : ASSERVISSEMENT DE VITESSE D’UN MOTEUR A COURANT CONTINU
Maquette Didalab
I) MATERIEL :
Alimentation, hacheur.
Ensemble électromécanique comprenant sur le même arbre : 2 machines à courant continu identiques (à
inducteur séparé) plus une petite machine (qu’on notera GST) pour mesurer la vitesse de rotation.
- La GST est une petite machine synchrone à aimants permanents,
délivrant une tension alternative de fréquence et d’amplitude de tension
proportionnelles à . Grâce à un détecteur de crête, on peut obtenir une
tension continue proportionnelle à la vitesse de rotation : VDétec =
(ici : = 0,0241V.s.rad-1).
R1 = 100kΩ et C1 = 8 µF.
- L’une des 2 machines à courant continu sera utilisée en moteur.
- L’autre ne sera pas toujours connectée et le moteur sera alors dit « à vide » puisqu’il n’aura pas de charge
mécanique. Lorsqu’elle sera utilisée, elle fonctionnera en génératrice et sera connectée à une résistance dans
laquelle elle dissipera de l’énergie. Le moteur sera alors dit « en charge ».
Remarque générale : Sur le boîtier du hacheur, figure sur fond bleu en haut à gauche un cadre intitulé
« commande ». Dans ce cadre on trouve :
- un potentiomètre pour le réglage du rapport cyclique,
- un potentiomètre pour le réglage de la fréquence de hachage,
- un comparateur et des fiches « banane ».
En reliant a à d et b à c (fils croisés !!), le réglage du rapport cyclique du hacheur s’effectue à
l’aide du potentiomètre.
Pour un contrôle électrique de à l’aide d’une tension externe, il faut appliquer une tension continue
comprise entre 0 et 10V entre la borne d et la borne noire « 0V », et laisser b relié à c.
Utilisation du moteur et de la génératrice :
Ce sont des machines à excitation séparée, donc il faut alimenter l’inducteur avec une tension continue
Uem = 24 V.
Attention : ne jamais couper cette excitation pendant que le moteur tourne, sinon il s’emballe !!!
II) REGULATION DE VITESSE :
1°) Fonction de transfert de l’ensemble moteur + hacheur :
La tension moyenne appliquée au moteur à la sortie du hacheur est donnée par Um = Vc où Vc est la tension de
commande externe du
hacheur comprise entre 0
et 10 V, appliquée entre
la borne verte d (dans le
cadre bleu) et la borne
noire 0V en haut à
gauche.
On a = 2,4 .
On note R la résistance
interne du moteur et de la
génératrice, et R’ la
résistance sur laquelle est
branchée la génératrice
(voir schéma plus loin).
Chaque machine a un moment d’inertie J/2, et une constante interne 0.
On admet que l’équation mécanique et les 2 équations électriques du problème conduisent à l’équation différentielle :
0c
dV
dt JR
avec
JR(R R' )
0
2(2R R' )
.
Ainsi, en notation de Laplace, la fonction de transfert en boucle ouverte du moteur s’écrit :
GST
R1C1VDétec
E (bleu)
A (rouge)
noir
C (jaune)
R'
Lmoteur
génératrice 24V
24V
G (bleu)
24V
Boîtier Hacheur Didalab

1
1()
() ( ) 1
c
pK
Hp V p p
avec
10
( ')
(2 ')
RR
KRR
.
En réalité, puisque l’information vitesse n’est disponible qu’à travers la machine synchrone associée au détecteur de
crête, il est plus intéressant de définir directement la fonction de transfert
2
2()
() ( ) 1
Détec
c
V p K
Hp V p p
avec
K2 = K1 .
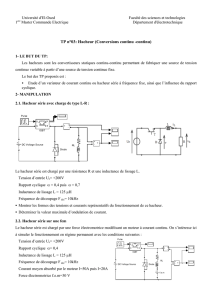
2°) Montage :
Eteindre tous les
appareils puis
compléter le
montage en
réalisant le circuit
ci-dessus (partie
puissance).
La résistance R’ est
un rhéostat de
puissance de 10.
Elle ne sera pas
toujours connectée
à la génératrice.
Relier e à f1 et e à
f2.
Relier le générateur
de rampe à c (donc
b à c).
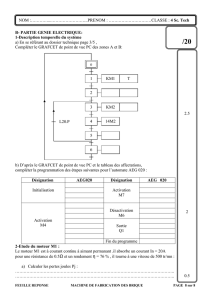
A l’aide d’une maquette à ALI, réaliser le montage ci-contre
(partie commande)
On prendra pour commencer R1 = 1k et R2 = 2k.
Ne pas oublier d’alimenter l’ALI en +15, -15 et 0.
Vc est la tension de commande du hacheur : la sortie de l’ALI
est donc à connecter sur la borne verte d du comparateur du
boîtier du hacheur.
Prendre pour Vref un géné BF en mode continu dont la borne de
masse sera reliée à la masse du circuit à ALI. Placer un voltmètre numérique aux bornes de ce GBF pour contrôler
la consigne de vitesse Vref.
Montrer que le schéma bloc du système se ramène à celui ci-
contre (R2/R1 est un « correcteur proportionnel ») :
Etablir l’expression de la fonction de transfert en boucle
fermée
3()
() ()
Détec
ref
Vp
Hp Vp
3°) Etude du fonctionnement :
Laisser le moteur à vide (R’ débranchée).
Alimenter le boîtier du hacheur en +15, -15 et 0.
Alimenter les inducteurs des 2 machines à courant continu en 24V (une alim. Peut suffire pour les deux à
condition que le bouton « 5A » soit enfoncé).
Après avoir ramené le potentiomètre de l’alim. sur 0, allumer celle-ci. Enfoncer le bouton « 5A ». Faire croître sa
tension jusqu’à 24 V.
Partir de Vref = 0 puis l’amener jusqu’à 9 V.
Mesurer VDétec puis connecter R’ (=environ 5) et mesurer l’erreur statique en régime permanent.
Recommencer (sans, puis avec R’) pour R2 = 4,7 k et conclure.
On revient à R2 = 2 k. Prendre pour Vref une tension en créneau variant entre 7V et 9V, avec une période de 2
secondes. A l’aide de l’oscilloscope numérique ou d’un ordinateur, enregistrer à la fois Vref et VDétec et mesurer le
temps de réponse à 95% du système bouclé.
Recommencer pour R2 = 4,7 k. Conclure (en s’appuyant sur l’étude théorique).
-
+H2(p)
Vref R2
R1
V
Détec
+
-
V
c
R
2
R
1
V
Détec
V
ref
R
1
R
2
24V
moteur
+15
-15
0
1
/
2
100%