CONCOURS GÉNÉRAL DES LYCÉES SESSION 2011 Sciences de l’Ingénieur

CONCOURS GÉNÉRAL DES LYCÉES
SESSION 2011
Sciences de l’Ingénieur
Durée : 5 heures
Aucun document n'est autorisé
Le matériel autorisé comprend toutes les calculatrices de poche, y compris les calculatrices programmables
alphanumériques ou à écran graphique, à condition que leur fonctionnement soit autonome et qu'il ne soit
pas fait usage d'imprimante, conformément à la circulaire n°99-181 du 16 novembre 1999.
« L’esprit SOLEX : la modernité pour tous et pour longtemps »
Le Solex électrique :
Contenu du dossier :
PRÉSENTATION DU PRODUIT : pages 1 à 6
QUESTIONNEMENT : pages 7 à 32
DOCUMENTS RÉPONSES : pages 33 à 38
Conseils au candidat :
Il doit vérifier que tous les documents définis ci-dessus ont été remis au début de l’épreuve.
La phase d'appropriation d'un système pluritechnique passe par la lecture attentive de l'ensemble
du sujet. Il est fortement conseillé de consacrer au moins 40 minutes à cette phase de découverte.
Une attention particulière devra être portée sur la qualité de rédaction de la réponse apportée à
chaque question. Les grandeurs calculées seront d’abord exprimées sous forme littérale avant
toute application numérique.
SI 11
A

IMPRIMERIE NATIONALE – 11 0628 – D’après documents fournis

1 LA SAGA SOLEX
®
1.1 LA NAISSANCE DU
Conçu durant la deuxième
G
Mennesson et Maurice Goud
a
été commercialisé pour la pre
m
Dans le contexte difficile de
France en reconstruction est
de transport économique et
p
Le Solex, dont le prix de ve
mensuel minimal et dont la
c
est très faible, répond p
exigences.
À l'aube de l'ère de l'automo
moyen de transport de mas
s
légende en occupant une pl
a
l'histoire de la motorisation po
Séduisant par son coût, sa s
é
pour les loisirs que pour les tr
a
Moyen de transport facile d'e
m
un vif succès : 8 millions d'ex
e
France et dans le reste du m
o
Véritable symbole de la Fran
c
les « Trente Glorieuses », la
indélébile dans la mémoire d
e
la ville qu'à la campagne,
S
s'adapter aux changements
t
(diffusion dans 70 pays dès 1
9
du patrimoine culturel et indu
s
Le 7 novembre 1988, les der
n
française. Les 100 derniers
enchères au profit des « resto
1.2 LE RENOUVEAU D
U
Le design ne fait pas tout. Il f
a
son avance stylistique. Fini
e
environnementale : le e-Sole
x
- 1 -
®
SOLEX
G
uerre Mondiale par Marcel
a
rd, le cyclomoteur Solex a
m
ière fois en 1946.
l'immédiat après-guerre, la
à la recherche d'un moyen
peu gourmand en énergie.
nte est inférieur au salaire
c
onsommation énergétique
arfaitement à ces deux
bile, le Solex fait figure de
s
e. Il entrera ainsi dans la
a
ce de premier ordre dans
pulaire.
é
curité, sa simplicité et sa sobriété, il s
e
a
jets quotidiens.
m
ploi, économique et fiable, le Sole
x
a r
a
e
mplaires ont ainsi été commercialisés e
n
o
nde.
c
e d'après-guerre et reflet du développe
m
« bicyclette qui roule toute seule » a l
a
e
plusieurs générations. Utilisé par tous,
S
olex verra son existence pérennisée
t
echniques durant plus de trente ans.
S
9
59) a véhiculé et renforcé l'image de S
o
s
triel français.
n
iers Solex sortirent des chaînes de pro
d
exemplaires seront pour la grande
m
s du cœur ».
U
SOLEX : LE E-SOLEX®
En 2005, le Solex renaît de
l’impulsion de Jean-Pierre
d’entreprise français. C’est e
n
société « Cible », rachète le
ambition : ressusciter la marqu
e
Pas question de verser dan
s
contraire, le e-Solex devra êtr
e
temps. Pour cela, Jean-Pierre
B
un grand nom du design : Pini
n
coopération intensive et fructu
e
donner au e-Solex une ligne t
r
une silhouette qui évoque le cy
c
a
llait également que sa motorisation soit
e
la motorisation thermique et ses
p
x
sera donc propulsé par un moteur élect
r
e
ra utilisé aussi bien
a
pidement rencontré
n
tre 1946 et 1988 en
m
ent français durant
a
issé une empreinte
présent aussi bien à
par sa capacité à
S
on succès mondial
o
lex comme élément
d
uction de son usine
m
ajorité vendus aux
ses cendres sous
Bansard, un chef
n
juin 2004 que sa
nom Solex. Son
e
mythique.
s
le passéisme. Au
e
en avance sur son
B
ansard fera appel à
n
farina. Six mois de
e
use ont permis de
r
ès moderne malgré
c
lomoteur historique.
en adéquation avec
p
ollutions sonore et
r
ique.
SI 11
B
Tournez la page S.V.P.

- 2 -
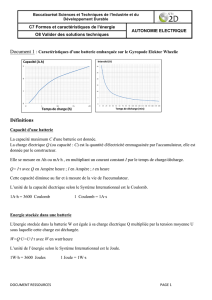
À l’automne 2006, le mythe redevient réalité. La commercialisation débute. Depuis, le
e-Solex a séduit tous les citadins à la recherche d’un moyen de transport individuel,
économique et écologique. Il est devenu dès sa première année de commercialisation le
cyclomoteur électrique le plus vendu en France. Son succès ne s’arrête pas aux frontières
françaises. On le trouve aussi en Belgique, au Luxembourg, aux Pays Bas et bientôt de
nouveaux pays seront ouverts à sa commercialisation.
Signature « electric »
placée derrière le pédalier
Afficheur numérique
au guidon
Coffre avant avec
phare intégré
Batterie amovible
Quatre coloris
au choix
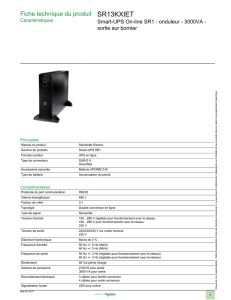
2 PRÉSENTATION DU CYCLOMOTEUR
Figure 1
1 Guidon en aluminium et poste de commandes
2 Selle réglable suspendue par amortisseur
3 Logement de batterie avec verrouillage à clé
4 Moteur électrique brushless 400 W dans le moyeu
arrière
5 Feu de croisement avant. Feu de position et stop arrière
6 Catadioptres latéraux orange
7 Catadioptre arrière rouge et plaque d’immatriculation
8 Pédales repliables
9 Coffre avant avec verrouillage à clé (charge maximale 0,3 kg)
10 Porte-bagages (charge maximale 3 kg)
11 Freins à disques mécaniques avant et arrière
12 Béquille centrale à rappel par double ressort
13 Rétroviseurs gauche et droit
14 Contacteur à clé
15 Prise de rechargement de la batterie in situ
16 Clignotants (en option)

2.1 CARACTÉRISTIQU
E
Vit
e
Au
t
co
n
M
a
Ha
2.2 MOTEUR
Contr
a
passé
moteu
arrièr
e
est de
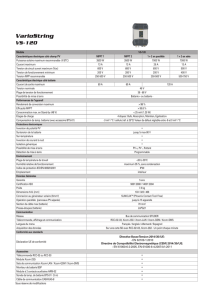
2.3 ASSISTANCE AU M
Figure 2
2.4 ROUES
P
o
1
2
P
f
- 3 -
E
S GÉNÉRALES
e
sse maximale : 35 km·h-1
t
onomie : environ 1 h 30 min (soit entre 2
5
n
ditions d’utilisation)
a
sse (sans batterie) : 36 kg
uteur de selle : minimum : 82 cm - maxi
m
a
irement au cyclomoteur Solex d’orig
i
à une propulsion électrique d’où son
n
u
r q n’est plus placé à l’avant mais dans
e
. Ce moteur électrique est de type brus
400 W pour une alimentation triphasée
s
OTEUR PAR PÉDALAGE
Le cyclomoteur est éq
u
permettant d’assister
moteur. La transmissio
n
la roue arrière est réali
s
de plateau-chaîne-pig
n
aussi d’utiliser le e-Sol
e
est déchargée.
Les caractéristiques d
e
sont les suivantes :
Nombre de dents : ZPé
d
ZRo
u
Rendement de la trans
m
Les pédales sont par ail
P
our offrir une très bonne stabilité et
u
o
ptimale, le e-Solex est équipé de
1
7 pouces avec jantes en aluminium à r
a
2
¼.
P
our améliorer le confort, la roue avant
e
f
ourche télescopique.
5
et 40 km selon les
m
um : 90 cm
i
ne, le e-Solex est
n
om « e-Solex ». Le
le moyeu de la roue
hless. Sa puissance
s
ous 36 V.
u
ipé d’un pédalier u
si nécessaire le
n
entre le pédalier et
s
ée par un dispositif
n
on. Cela permet
e
x lorsque la batterie
e
cette transmission
d
alie
r
= 32
u
e = 16
m
ission :
η
p = 0,9
l
eurs repliables.
u
ne tenue de route
grandes roues de
a
yons et pneus 17 ×
e
st installée sur une
Tournez la page S.V.P.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
1
/
48
100%