Lire la première partie de la thèse


Chapitre III
Expérimentation sur la route
départementale 961
117


9.
Présentation
9.1 Objectifs
Préalablement au programme Surveillance Automatisée des Routes pour l’Information des
conducteurs et des gestionnaires (SARI), la direction des routes et des transports du Conseil
Général du Maine-et-Loire (CG49) a identifié le site de « Marans » sur la route départementale
D 961 comme un site où a eu lieu un nombre élevé d’accidents (notamment des accidents ne
donnant pas suite à un procès verbal) et pour lesquels aucune cause tangible n’a permis d’expli-
quer leur fréquence. Entre 1998 et 2000, quatre accidents ayant fait l’objet d’un procès verbal
ont été relevés et restent mal expliqués. Dans la plupart des cas, il s’agit d’accidents n’impli-
quant qu’un seul véhicule. Ce site possède la particularité d’être en ligne droite avec un sommet
de côte, une situation que l’on rencontre fréquemment sur le réseau routier du département de
Maine-et-Loire et pour laquelle de nombreux accidents non expliqués sont à déplorer. Cette to-
pologie de route n’est que très peu étudiée bien que beaucoup de départements comme celui du
Maine-et-Loire (49) avec ses 4 500 km de routes départementales présentent cette configuration.
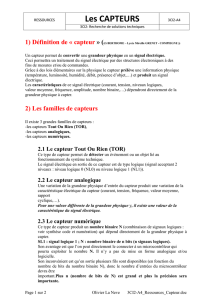
Ce tronçon se situe à 40 km au nord ouest d’Angers (49). Environ 2 000 véhicules par
voie emprunte chaque jour cette départementale. Elle présente un taux de circulation de poids
lourds légèrement inférieur à la moyenne nationale (cf. paragraphe 1.3 page 11). Le besoin
d’observer les véhicules circulant sur ce sommet de côte a nécessité l’installer de capteurs
[Aubin et al., 2008]. La convergence entre ce besoin et celui d’effectuer des tests en grandeurs
réelles a permis les déploiements des solutions évoquées précédemment.
119

9 : Présentation
9.2 Le conditionnement et l’intégration des capteurs dans la
chaussée
Le principe de conditionnement de ces capteurs a été inspiré des capteurs non embarqués qui
s’installent dans la chaussée de la route tels que les boucles électromagnétiques ou les capteurs
piezo-électriques... [Fillastre, 2006].
9.2.1 Le conditionnement des capteurs optiques
Comme présenté dans le paragraphe 7.4.4 page 72, les quatre fibres constituant un capteur
optique sont nues. Elles sont donc fragiles et difficilement manipulables. Pour faciliter leur ins-
tallation, elles sont confinées dans un tube PVC, profilé en U (3 de la figure 9.1). Sa dimension
est de 18 mm de largeur interne, 20 mm de largeur externe, et 10 mm de hauteur. De la résine
spéciale 1, 2 de la figure 9.1), conçue pour protéger les câbles et les fibres optiques, est coulée
dans ce profilé sur une hauteur de 5 mm. Cette résine est considérée comme souple. Après sé-
chage, la première fibre optique est positionnée, puis la deuxième est placée, décalée de 45 mm
comme énoncé dans le paragraphe précédent et ainsi de suite jusqu’à la quatrième. La partie
pigtail, zone constituée dans notre cas d’une fibre optique comme la zone reliant le capteur
et le connecteur, est insérée dans un tube souple renforcé pour protéger la partie restante des
fibres optiques. Ce tube est fixé au profilé en PVC par l’intermédiaire d’un collier. Une nouvelle
couche de résine est ensuite coulée afin de protéger la zone sensible et de limiter les déforma-
tions excessives. L’ensemble est ainsi aisément transportable et prêt à être positionné dans la
chaussée de la route.
Deux capteurs optiques ont été installés. Au final, les fibres se situent dans la chaussée à une
profondeur voisine de 0,8 cm.
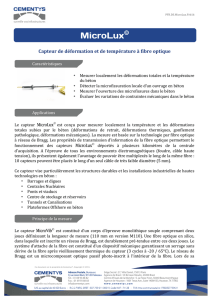
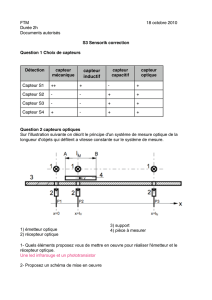
FIGURE 9.1 – Schéma du capteur à fibres optiques enfoui dans la chaussée de la route. 1 - fibres
optiques (grossies cent fois), 2 - résine, 3 - profilé PVC en forme de U, 4 - support du capteur
pour l’installation à la hauteur désirée sur la route, 5 - bitume.
1. Cette résine a été présentée précédemment : Resimast 460 boucle de la société Résipoly.
120
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
1
/
127
100%