Vitesse de propagation : Principe : Mesures :

chapitre 5 : ondes et TP n°1
imagerie médicale (p70 à 85)
Vitesse de propagation :
La vitesse de propagation V d’une onde est définie par la relation suivante :
avec
La vitesse de propagation d’une onde sonore (son ou ultrason) dans l’air aux
températures usuelles vaut :
atelier 1 : détermination de la vitesse des ultrasons
Principe :
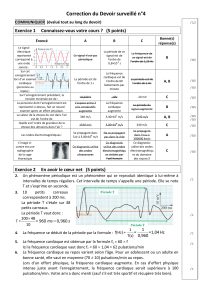
Un émetteur d’ondes ultrasonores émet des salves d’ondes US à intervalles de temps réguliers.
Le récepteur 1 reçoit la salve à la date t1. Le récepteur 2 séparé d’une distance d reçoit la même salve à une date t2
donc avec un retard t = t2- t1 par rapport au récepteur1.
Les mesures de d et t vont permettre de déterminer la vitesse (ou célérité) v des ultrasons.
Mesures :
1. Ouvrir Synchronie, charger le fichier us.sn2 (poste de travail/mes espaces/logiciel reseau/phy/seconde-
phy/US/us.sn2)
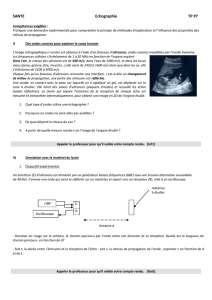
2. Placer le récepteur 2 à une distance d de 10 cm du récepteur 1. Lancer alors l’acquisition (F10). Vérifier que
la courbe visualisée a l’allure du document ci-dessous Appeler le professeur pour la vérification
nom :
classe :
V =
EA0
EA1
vers
générateur
Point A : Réception de la salve d’ultrasons à la date t1
Point B : Réception de la salve d’ultrasons à la date t2
Retard t
note :

3. Faire un zoom sur une partie de l’écran. Mesurer à l’aide de l’outil réticule la durée t (cliquer sur
l’icône réticule , clic gauche sur point A, clic droit sur point A, choisir origine relative, cliquer
gauche sur point B, lire en bas à droite dans la fenêtre jaune la durée t qui s’affiche). Placer cette
mesure dans le tableau ci-dessous
4. Faire ensuite les réglages nécessaires et lancer les acquisitions (F10) afin de remplir le tableau suivant
d (en cm)
d (en m)
t (donné par le
logiciel)
t (en s)
V (en m/s)
10
20
30
40
50
Appeler le professeur pour la vérification
5. Faire une moyenne des vitesses obtenues : Vmoy =
6. Faire un calcul d’erreur sur votre mesure : %erreur =
100
exp x
V
VV
théo
théo
atelier 2 : l’étude des fonds marins par un sonar
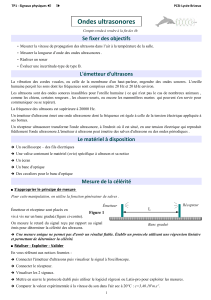
Un sonar (sound navigation and ranging) est un appareil, utilisant les propriétés particulières de la
propagation du son dans l'eau pour détecter et situer les objets sous l'eau. Il est entre autre utilisé pour la
pêche, pour la détection des bancs de poissons
Connectez-vous sur l’animation suivante : http://www.ostralo.net/3_animations/swf/sonar.swf
1. Où se trouvent l’émetteur et le récepteur d’ultrasons ?
2. Représenter sur le dessin ci-contre la durée t correspondant au trajet des ultrasons.
En déduire la valeur de cette durée t.
3. On appelle h la profondeur de l’eau sous le bateau.
Représenter sur le croquis ci-contre cette distance.
4. Trouver une relation entre le trajet d parcouru par les
ultrasons et cette profondeur h ?
5. Répondre aux trois questions proposées. On écrira l’expression littérale avant de faire tout calcul. Appeler le
prof afin de vérifier chaque question.
Question n°1 :
Question n°2 :
Question n°3 :
% erreur =
=
1
/
2
100%