robot moway

OUTILS ET METHODES D’ANALYSE ET DE DESCRIPTION DES SYSTEMES
2.1.
APPROCHE FONCTIONNELLE DES SYSTEMES
2
1
/
9
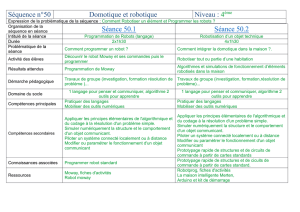
Batterie Pont en H Moteur Chaîne cinématique
Avancer/Reculer
ROBOT
Chaîne
d’information
Informations
Chaîne d’énergie
Energie
Electrique
ALIMENTER
CONVERTIR
DISTRIBUER
TRANSMETTRE
Action
COMMUNIQUER
ACQUERIR
TRAITER
ROBOT MOWAY
Œ Compétence(s) travaillée(s)
CO2.1 Identifier les flux et les formes d’énergie, caractériser ses
transformations.
CO3.1 : Décoder le cahier des charges fonctionnel d’un système.
CO4.1 : Identifier et caractériser les fonctions et constituants d’un
système.
• Domaine(s) d’étude
Centre(s)
d’intérêt(s)
Centre(s)
d’intérêt(s)
Formes et
caractéristiques
de l’énergie
Identifier les différentes formes
et caractéristiques d’énergie
Caractéristiques
des matériaux
Identifier les caractéristiques des
matériaux constituant le robot Moway
Formes et
caractéristiques
de l’information
Identifier les différentes formes
et caractéristiques de
l’information circulante dans le
robot Moway
Ž Conditions d’acquisition
¸
Temps alloué : 2 h 00 maxi
]
Travail par binôme en salle de T.P, en autonomie partielle et en possession du support « Robot MOWAY »et du
dossier technique du robot à disposition, Livre de STI2D.
Compte rendus

OUTILS ET METHODES D’ANALYSE ET DE DESCRIPTION DES SYSTEMES
2.1.
APPROCHE FONCTIONNELLE DES SYSTEMES
2
2
/
9
Problématique : Comment se faire une représentation interne du robot
moway au niveau énergie_matière_information?
Un système technique comme le robot Moway est un assemblage de constituants ayant
chacun une fonction technique élémentaire. C’est l’assemblage de ces fonctions techniques
élémentaires qui permet d’assurer une fonction technique plus élevée, comme se déplacer en
faisant tourner ses roues.
Pour faire ressortir la structure de l’assemblage du robot Moway, nous allons utiliser une
représentation du type chaîne d’énergie et chaîne d’information et identifier les différentes
matières constituants le robot.
Chaîne d’énergie
Chaîne d’information
Consignes commandes
Messages
Entraîner
la roue
en rotation
Consigne de vitesse
Information vitesse réelle
Consignes commandes
Fig.1

OUTILS ET METHODES D’ANALYSE ET DE DESCRIPTION DES SYSTEMES
2.1.
APPROCHE FONCTIONNELLE DES SYSTEMES
2
3
/
9
Activité 1 : 11_Identifier les constituants sur la figure 2 de la chaîne d’énergie du robot Moway.
En utilisant le manuel premiers pas Moway et des schémas électriques.
12_Associer ces constituants au schéma de la chaîne d’énergie du robot Moway sur la figure 3:
Figure 2
3- Moteur
CC
4-Réducteur 5-Roue
1-Batterie
2
-
Pont en H
et transistors
FET
Alimenter
Distribuer
Convertir
Transmettre
Entraîner
la roue en
rotation
Chaîne d’énergie
Figure 3
Li-Po
1
-
Batterie
2-Pont en H
et transistors
FET
3
-
Moteur
4
-
Réducteur

OUTILS ET METHODES D’ANALYSE ET DE DESCRIPTION DES SYSTEMES
2.1.
APPROCHE FONCTIONNELLE DES SYSTEMES
2
4
/
9
13_Préciser le type d’énergie avec leurs grandeurs caractéristiques (Couple C, tension U, intensité
I, w fréquence de rotation) de la chaîne d’énergie du robot Moway.
Figure 4
14_Compléter le tableau suivant des constituants, fonctions et leurs
principales caractéristiques d’entrée et sortie de la chaîne d’énergie du robot Moway
Groupe
fonctionnel
Constituants
technique
Fonction énergétique du
constituant
Principales
caractéristiques
d’entrée et sortie
Alimenter Batterie Li-Po
Fournir une tension et un
courant pendant certain
temps
E-----------------------------
S : U=3.7V 350mAh
Distribuer Pont en H +
Transistor FET
Contrôler le sens de
rotation des moteurs + adapter
l’énergie électrique
E-----------------------------
S-----------------------------
Convertir Moteur CC
Transformer l’énergie
électrique en énergie
mécanique de rotation
E : U=2V I=0.66A
S----------------------------
Transmettre Réducteur Adapter l’énergie
mécanique de rotation
E----------------------------
S----------------------------
Energie Elec
U=3.7V
I=350mAh Energie Elec
adaptée et
polarisée
U=
I=
Eméca
w1=
C1=
E méca
w2=
C2=
Il n’est pas nécessaire de mettre les
valeurs numériques pour ces 3 types
d’énergie

OUTILS ET METHODES D’ANALYSE ET DE DESCRIPTION DES SYSTEMES
2.1.
APPROCHE FONCTIONNELLE DES SYSTEMES
2
5
/
9
Activité 2 : 21_Identifier les principaux constituants sur la figure 4 et les formes d’informations
sur la figure 6 de la chaîne d’information du robot Moway. (cas du suiveur de ligne)
22_Associer ces constituants au schéma de la chaîne d’information du robot Moway
sur la figure 4:(cas du suiveur de ligne)
Acquérir
Traiter
Communiquer
Chaîne d’information
Figure 4
Vers les moteurs
Fig.5
2
-
PIC 18F86J50
Com Vers un
PC ou un
autre robot
en RF
1 Capteur IR
CNY70
3-PIC 16F687
4- Pont en H +
Transistor FET
4-Module
RF
Eléments de la chaîne d’énergie
Capteur IR
Microprocesseur
Module RF
 6
7
8
9
6
7
8
9
1
/
9
100%