1° année M2102 TP d`Automatisme

DUT GEII - 1° année
M2102
TP d'Automatisme
•
IUT de Toulon Département GEII 1/35

DUT GEII - 1° année
M2102
Table des matières
TP0 : Prise en Main de CoDeSys et des API WAGO 750-849....................................................................3
TP1 : Chaîne de Bouchonnage..............................................................................................................7
TP2 : Gestion d'un château d'eau.......................................................................................................11
TP3 : Manipulateur Pneumatique 5 Mouvements...............................................................................15
TP4 : Tracker Solaire...........................................................................................................................21
TP5 : Étude d'un système de Tri Postal ...........................................................................................27
TP6 : Portail automatisé.....................................................................................................................32
IUT de Toulon Département GEII 2/35

M2102 TP0 S2
TP0 : Prise en Main de CoDeSys et des API
WAGO 750-849
1. Présentation / Préparation
! """""
"#$%&'
""(
➢Nomenclature :
Référence Désignation :
%)*% +",-'.
/)0/1 /"
)01 "2""""*)3
4)*4 3&""51 3
IUT de Toulon Département GEII 3/35
S1 S2 S3 S4 S5
I1
I2
H1
H2
H3
H4
P1 P2
Bornier
3''/

M2102 TP0 S2
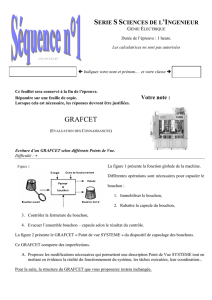
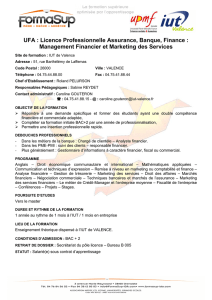
1. Complétez le tableau de la page suivante en indiquant le type d'E/S des éléments utilisé pour relier les différents
éléments de la platine
Mnémonique adresses API Type d'E/S
%) 6/71'
%1 6/71')
/) 6/71'
/1 6/71'8
4) 697'
41 697')
4: 697'1
4 697':
) 6/
) 6/)
2. D'après les documentations techniques fournies en annexe des cartes d'E/S utilisées, donnez un schéma de câblage
correspondant au tableau précédent. Faire apparaître les cartes d'E/S, les éléments de la platine de test, et
l'alimentation 0/24V de l'API.
2. Programmation
➢Pour chaque sous-partie, créez un nouveau projet, dans un nouveau répertoire' ;
";"*<=;0>"?">@>"";;"*<=
;05?)A=" @,""B".?)A="@'''
➢#<=="Btestée sur la platine0B="C'
➢#<=="Bvalidée par l'enseignant'
➢;'
-";5"(
IUT de Toulon Département GEII 4/35

M2102 TP0 S2
1. A l'aide du manuel simplifié, suivez les différentes étapes décrivant la marche à suivre pour générer et tester ce
grafcet :
–"D";"E
–"; (n'utilisez que les fonctionnalités dont vous avez besoin pour réaliser le
grafcet ci-dessus!!!)
–,"<""C.
➢"""$(
2. Programmez maintenant les transitions suivantes, en langage Ladder, sur le grafcet précédent :
FA)GFA1( %),/),/1..
FA1GFA:( H%1:
FA:GFA)( /1I%)
➢"""J+$%(
3. Programmez maintenant les transitions 1 et 3 respectivement en ST et FBD.
➢"(
4. Utilisez maintenant une action mémorisée de façon à maintenir H1 allumé durant les étapes 2 et 3.
5. Retardez l'action H3 de 1,5s par rapport à l'entrée dans l'étape 3.
➢#(
6. Placez un bloc compteur/décompteur « CTUD » dans le programme principal.
-)(""#J#0=>?@>"
="*"'CF,-$.<;'/;;;";
*"05#K$L'
-1(#<=;=C";"""0B'/;?MMM@""'
C""N="0;;=O'
7. Ouvrez l'aide de CoDeSys et définissez pour chaque entrée et chaque sortie du bloc CTUD :
- son format,
- son rôle.
8. Complétez le logigramme afin d'obtenir le fonctionnement suivant :
–#%:
–$%
–P*>"/)
–4 "*
➢F""=(
-(""= 8""C""*:18=
"""3)3'
9. Créez un programme en langage ST permettant d'obtenir le fonctionnement suivant :
- H1 est allumé lorsque la tension mesurée sur EA1 dépasse 2V ;
- H2 est allumé lorsque la tension mesurée sur EA1 dépasse 4V ;
- H3 est allumé lorsque la tension mesurée sur EA1 dépasse 6V ;
- H4 est allumé lorsque la tension mesurée sur EA1 dépasse 8V .
➢ (
-(;""C+"QC<2=CK'CC"""""""'
IUT de Toulon Département GEII 5/35
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
1
/
35
100%