Traction électrique ferroviaire

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 5502 - 1
Traction électrique ferroviaire
Convertisseurs et moteurs
par
Victor SABATÉ
Ingénieur CNAM
Expert électrique à la Direction technique de GEC Alsthom Transport
Intervenant ferroviaire à
l’École supérieure des techniques aéronautiques et de construction automobile
e choix politique de l’augmentation de la vitesse des trains ainsi que celle
des performances des trains de marchandises a conduit la SNCF à s’orienter
vers l’utilisation des moteurs triphasés – synchrone et asynchrone – à partir de
la décennie quatre-vingt.
Ces moteurs se caractérisent par une plus grande puissance massique et
volumique que les moteurs à courant continu. Cette démarche s’avère néces-
saire, car la masse de l’engin de traction constitue une grandeur critique notam-
ment sur la limitation de la vitesse du train à cause des problèmes de
dégradation des voies ferrées.
Depuis la fin de la décennie quatre-vingt, cette motorisation se généralise sur
l’ensemble des nouveaux matériels roulants : automotrices de banlieue et de
région, motrices TGV et locomotives.
Le moteur synchrone à rotor bobiné n’est pas industriellement intéressant
pour équiper les automotrices, car la puissance unitaire des moteurs est de quel-
ques centaines de kilowatts. Au-dessous de 1 MW, le dimensionnement du rotor
ne varie pas proportionnellement à la puissance de définition du moteur.
1. Compatibilité électromagnétique dans le domaine ferroviaire.. D 5 502 2
1.1 Généralités ................................................................................................... — 2
1.2 Perturbations générées par le train sur l’environnement ........................ — 4
1.3 Perturbations extérieures subies par le train ............................................ — 6
2. Semiconducteurs de puissance ........................................................... — 6
2.1 Performances des composants utilisés ..................................................... — 6
2.2 Techniques de refroidissement .................................................................. — 7
3. Convertisseur d’entrée sous caténaire continue............................ — 7
3.1 Caractéristiques spécifiques au ferroviaire ............................................... — 7
3.2 Structures de hacheur................................................................................. — 9
4. Convertisseur d’entrée sous caténaire monophasée..................... — 10
4.1 Pont monophasé à commutation naturelle............................................... — 10
4.2 Pont monophasé à commutation forcée ................................................... — 13
5. Moteur synchrone autopiloté............................................................... — 14
5.1 Caractéristiques spécifiques au ferroviaire ............................................... — 14
5.2 Alimentation par un onduleur de courant................................................. — 16
5.3 Caractéristiques de fonctionnement.......................................................... — 20
5.4 Applications ferroviaires............................................................................. — 21
6. Moteur asynchrone.................................................................................. — 23
6.1 Caractéristiques spécifiques au ferroviaire ............................................... — 23
6.2 Alimentation par un onduleur de courant................................................. — 27
6.3 Alimentation par un onduleur de tension ................................................. — 28
6.4 Applications ferroviaires............................................................................. — 32
Pour en savoir plus .......................................................................................... Doc D 5 504
L

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
TRACTION ÉLECTRIQUE FERROVIAIRE ______________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 5502 - 2© Techniques de l’Ingénieur, traité Génie électrique
Le pilotage des moteurs triphasés s’effectue au moyen d’onduleurs alimentés
depuis :
— une source de courant continu pour les moteurs synchrone et asynchrone ;
— une source de tension continue seulement pour le moteur asynchrone.
La SNCF n’a pas choisi l’utilisation du moteur synchrone alimenté depuis une
source de tension continue, car la structure de l’onduleur est nettement plus
complexe et coûteuse par rapport à celle retenue.
Ce choix de motorisation n’est devenu intéressant que grâce à l’évolution
récente et progressive (depuis deux décennies) des semiconducteurs de puis-
sance. L’optimisation de la masse et du volume des équipements embarqués
étant un critère essentiel, il est nécessaire de minimiser le nombre de semicon-
ducteurs de puissance et on se situe, fréquemment, à la limite du savoir-faire
technologique du moment.
L’alimentation de l’engin de traction depuis la caténaire implique l’adaptation
de la tension et/ou du courant d’alimentation des onduleurs triphasés en utili-
sant des structures de convertisseurs d’entrée plus ou moins complexes.
Avant de concevoir la structure et le pilotage des convertisseurs d’entrée, il est
important de définir leur compatibilité électromagnétique vis-à-vis de l’envi-
ronnement ferroviaire et public.
Compte tenu de ces différents aspects techniques, nous abordons cette étude
sur les convertisseurs statiques et les moteurs de traction dans l’ordre suivant :
— compatibilité électromagnétique dans le domaine ferroviaire ;
— semiconducteurs de puissance ;
— convertisseurs d’entrée sous caténaire continue et sous caténaire
monophasée ;
— moteur synchrone et moteur asynchrone.
Nota : L’article «Traction électrique ferroviaire » fait l’objet de plusieurs fascicules :
D 5 501 Dynamique ferroviaire et sous-stations
D 5 502 Convertisseurs et moteurs
D 5 503 Perspectives d’évolution
Les sujets ne sont pas indépendants les uns des autres. Le lecteur devra assez souvent se reporter aux
autres fascicules.
1. Compatibilité
électromagnétique dans le
domaine ferroviaire
Dans le domaine ferroviaire, le seul aspect toujours traité con-
cerne les perturbations électriques conduites à basse fréquence
(
f
< 20 kHz) émises par le matériel roulant vers les circuits de signa-
lisation ferroviaire, car elles mettent en jeu la sécurité de la circula-
tion des trains.
L’évolution technologique des équipements embarqués (prolifé-
ration des matériels électroniques, augmentation des d
i
/d
t
et des
d
v
/d
t
des semiconducteurs de puissance...) s’est accompagnée cor-
rélativement d’une augmentation des problèmes de perturbations
électromagnétiques à haute fréquence jusqu’à 1 GHz.
Pour éviter une situation critique et afin d’uniformiser les prati-
ques, une Directive relative à la Compatibilité Électromagnétique
« CEM » a été adoptée par le Conseil de la Communauté Euro-
péenne en 1989, qui reconnaît ainsi la CEM comme un élément
important dans la réalisation des équipements. Le Comité Européen
de Normalisation Électrique « CENELEC » a établi des normes de
CEM dont la mise en œuvre est effective depuis le 1er janvier 1996.
Ces normes CEM concernent les différents environnements rencon-
trés (domestique, commercial, industriel...) et aussi, le ferroviaire
(norme EN 50121).
1.1 Généralités
La compatibilité électromagnétique est définie comme l’aptitude
d’un dispositif, d’un appareil ou d’un système à fonctionner dans
son environnement électromagnétique de façon satisfaisante et
sans produire lui-même des perturbations électromagnétiques into-
lérables pour tout ce qui se trouve dans cet environnement.
■Définitions
On appelle :
—source, tout émetteur de perturbation électromagnétique
d’origine humaine (
décharge électrostatique
), naturelle (
foudre
) ou
matérielle ; cette source peut être intentionnelle ou pas, permanente
ou impulsionnelle ;
—victime, l’élément soumis à une perturbation électro-
magnétique ;
—couplage, le mode de transmission (
conduit et/ou rayonné
)
d’une perturbation électromagnétique de la source vers la victime.
Rappelons quelques définitions spécifiques à la caractérisation
CEM d’un équipement :
La susceptibilité caractérise le niveau perturbateur
mesuré
à par-
tir duquel cet équipement est perturbé.
L’immunité définit le niveau perturbateur
spécifié
garantissant le
bon fonctionnement de cet équipement.

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
______________________________________________________________________________________________________ TRACTION ÉLECTRIQUE FERROVIAIRE
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 5502 - 3
■CEM dans le domaine ferroviaire
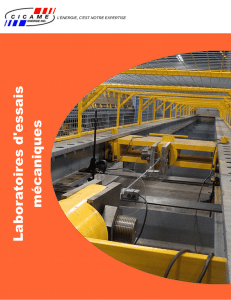
La figure 1 présente les principales sources de perturbations et
les différents circuits victimes dans le domaine ferroviaire et public.
Parmi les principales sources, on distingue :
—dans le matériel roulant :
• les convertisseurs de puissance, les moteurs de traction, les
disjoncteurs... ;
• le contact glissant pantographe/caténaire (
f
> 30 MHz) ;
—à l’extérieur du matériel roulant :
• les différents émetteurs de radiocommunications : émetteurs
radio/TV, radars... ;
• les systèmes ferroviaires voisins (notamment les harmoni-
ques du courant caténaire) ;
• les phénomènes d’origine naturelle : la foudre, les décharges
électrostatiques ;
• les bruits industriels dans une moindre mesure.
Pour assurer la compatibilité électromagnétique d’un équipe-
ment, l’expérience montre qu’il est souhaitable de garantir une
marge de sécurité entre les niveaux de susceptibilité et d’immu-
nité d’au moins 10 dB.
Figure 1 – Principales sources
de perturbations et différents
circuits victimes dans le
domaine ferroviaire et public
Sources de perturbations
Système
ferroviaire
voisin
Foudre
Talkie-walkie
Émetteurs radio, VHF, ...
Réseau EDF
Radar
Contact glissant pantographe/caténaire
Équipements sensibles
Électronique
de commande Radio
Calculateur
Téléphone
portable Pacemaker
Équipements perturbants
Hacheur
auxiliaire Câbles
Disjoncteur
Relais
Contacteurs
Climatisation
Moteur Charge batterie
Auxiliaires
Réseau télécom riverain
Signalisation
ferroviaire
Système
ferroviaire
voisin
Circuit de voie
Téléphone Récepteurs :
TV, radio...
Appareillage domestique et commercial Appareillage industriel
Circuits victimes
M
Transformateur
Convertisseur
statique
Transformateur
Convertisseur
statique
de traction

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
TRACTION ÉLECTRIQUE FERROVIAIRE ______________________________________________________________________________________________________
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
D 5502 - 4© Techniques de l’Ingénieur, traité Génie électrique
En pratique, les phénomènes de perturbations sont générale-
ment classés en cinq types :
— décharge électrostatique ;
— perturbation conduite en mode commun et/ou en mode
différentiel ;
— influence par le champ électrique
E
en champ proche ;
— influence par le champ magnétique
H
en champ proche ;
— rayonnement électromagnétique
E
et
H
en champ lointain.
Les unités de
E
et
H
sont exprimées en décibels (dB) par rapport à
l’unité de référence.
Les champs électrique et magnétique sont toujours couplés avec
une certaine importance relative selon que l’on se situe en champ
proche ou en champ lointain.
On parle de « champ proche » lorsque la distance
D
entre la
source et la victime est :
avec
l
longueur de l’onde dans l’air.
On parle de « champ lointain » lorsque la distance
D
est supé-
rieure à cette relation. En champ lointain, il y a équilibre énergétique
entre les champs
E
et
H
et l’impédance caractéristique de l’onde est
de 377 W.
1.2 Perturbations générées par le train
sur l’environnement
Les principales perturbations générées par le train sur l’environ-
nement ferroviaire et public sont identifiées comme suit :
— perturbations conduites à basse fréquence ou audiofréquence
(
f
< 20 kHz) ;
— couplage par champ magnétique à basse fréquence
(
f
< 5 kHz) ;
— rayonnement électromagnétique radiofréquence (jusqu’à
1 GHz).
1.2.1 Perturbations conduites (
f
< 20 kHz)
Les perturbations conduites constituent le problème CEM majeur
dans le domaine ferroviaire. Les convertisseurs d’entrée des engins
de traction génèrent un spectre de courant sur l’alimentation (caté-
naire et rails) qui peut, sous certaines conditions, présenter un ris-
que de dysfonctionnement des circuits de voie « CdV » de la
signalisation ferroviaire. En effet, la sécurité de la circulation des
trains repose sur le bon fonctionnement des CdV qui utilisent les
rails comme conducteurs.
Il existe plusieurs types de circuits de voie et, en bon état de fonc-
tionnement, ils sont insensibles aux harmoniques du courant de
traction. Pour qu’il existe un risque de non-détection de la présence
d’un train à l’intérieur d’un canton, il faut deux conditions
simultanées :
— un ou plusieurs incidents sur les circuits de voie (par exemple,
un rail cassé) ;
— un harmonique de courant de traction à une fréquence utilisée
par les circuits de voie.
La 2e condition est soumise à des prescriptions mentionnant les
fréquences d’utilisation des CdV et respectivement la valeur maxi-
male admissible des courants harmoniques Ih. Pour le réseau de
traction SNCF, les prescriptions essentielles à propos des courants
harmoniques générés dans les rails par un « train complet » sont :
— basse fréquence spécifique :
• CdV « 50 Hz » (caténaire 1 500 V continu ® Ih < 1,2 A à 50 Hz ;
• CdV « 83 Hz » (caténaire 25 kV, 50 Hz) ® Ih < 0,7 A à 83 Hz ;
— bande de fréquence 1 700 à 2 600 Hz :
CdV « UM 71 » (équipant les deux types de réseaux) ®
Ih < 70 mA pour les harmoniques de rang pair du réseau
monophasé 50 Hz ;
Ih < 30 mA pour les harmoniques de rang autre que pair et
impair.
Les courants harmoniques aux fréquences différentes de celles de
rang pair et impair du réseau monophasé sont issus des produits de
modulation entre les convertisseurs statiques. Ce problème est sur-
tout mis en évidence lorsque le train est équipé de moteurs de trac-
tion à courants alternatifs alimentés, au minimum, par deux
convertisseurs en cascade.
Réduction des perturbations à la source
A basse fréquence spécifique, on ajoute fréquemment un filtre
passif du second ordre, ce qui constitue une solution très efficace du
point de vue sécurité intrinsèque.
Dans la bande de fréquence 1 700 à 2 600 Hz, les prescriptions
sont respectées en agissant sur la régulation des convertisseurs sta-
tiques d’entrée.
1.2.2 Couplage par champ magnétique (
f
< 5 kHz)
Les lignes de télécommunications disposées le long des voies
sont sensibles au couplage par champ magnétique et, d’autant plus,
que le spectre du courant généré à l’alimentation (caténaire et rails)
est élevé. Cette situation est la plus critique pour le réseau de ten-
sion monophasée 25 kV à 50 Hz.
L’alimentation électrique des engins de traction ferroviaire est la
seule qui ne soit pas, même en régime normal, symétrique par rap-
port à la terre. Elle met en jeu, comme conducteur de retour, les
rails, mal isolés par rapport au sol. En France, les textes officiels ont
toujours admis cette exception, à charge pour la SNCF d’en estom-
per les effets vis-à-vis des riverains.
Les tensions perturbatrices induites sur les conducteurs à cou-
rants faibles peuvent créer, en l’absence de protection, des dangers
pour le personnel ou pour le matériel ainsi que des anomalies de
fonctionnement. Les valeurs limites adoptées par les Télécommuni-
cations françaises et les autres riverains figurent dans les Directives
du Comité Consultatif International Télégraphique et Téléphonique
« CCITT ».
Réduction des perturbations à la source
■Engins de traction
La grandeur qui permet de caractériser un train, vis-à-vis des per-
turbations par couplage magnétique, est définie par le CCITT
comme une somme quadratique des composantes harmoniques du
courant caténaire affectées de coefficients pondérateurs traduisant
leur influence sur l’oreille humaine. La grandeur ainsi obtenue,
appelée courant psophométrique « I
pso
», est définie comme suit :
avec Ihvaleur efficace de l’harmonique du courant à la
fréquence
f
(
f
< 5 kHz),
P
f
poids attribué à la fréquence
f
; la valeur est
maximale et proche de 1 entre 800 et 1 200 Hz.
Dans ce fascicule, l’approche du problème CEM est limitée
aux interactions entre le matériel roulant et l’environnement
extérieur : ferroviaire et public.
Dl
2p
-------
<
Exemple : le courant maximal I
pso
mesuré sur une rame TGV-
Atlantique peut atteindre une amplitude de 15 A pendant la montée en
vitesse. Notons que la puissance nominale d’une rame TGV-A est de
8 800 kW à la jante, sous réseau monophasé.
I
pso
S
P
f
Ih
()
2
=

17/09/2008
Madame, Monsieur
Dossier délivré pour
17/09/2008
Madame, Monsieur
Dossier délivré pour
______________________________________________________________________________________________________ TRACTION ÉLECTRIQUE FERROVIAIRE
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique D 5502 - 5
Le courant psophométrique I
pso
constitue seulement un indi-
cateur du niveau d’interférence d’un train sur les lignes de télécom-
munications riveraines, mais rien de plus. Car l’importance de
l’agression dépend de nombreux paramètres : longueur du parallé-
lisme et distance entre la caténaire et le conducteur induit, intensité
du courant caténaire à la fréquence considérée, nature du sol, sys-
tème d’alimentation de traction et nature de l’enveloppe du conduc-
teur induit. Par contre, des actions sont menées sur la structure et le
pilotage des ponts redresseurs des engins de traction récents pour
réduire notamment le courant
Ipso
, comme nous le verrons dans les
paragraphes 3 et 4.
D’après les recommandations du CCITT, la tension induite pso-
phométrée maximale autorisée pour ne pas occasionner de trou-
bles dans les circuits de télécommunications est de 1 mV au niveau
du poste d’abonné.
En pratique, les problèmes CEM apparaissent généralement sur
les lignes classiques SNCF longeant des lignes de télécommuni-
cations anciennes et mal immunisées. Une convention SNCF-PTT
de 1983 détermine les différentes responsabilités pour les actions
à mener.
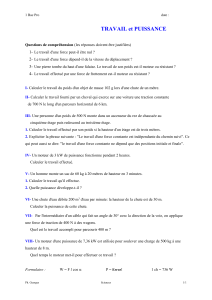
■Systèmes d’alimentation à autotransformateur, appelé
« 2 x 25 kV »
Ce système d’alimentation (figure 2) est utilisé systématiquement
sur les lignes à grande vitesse, la méthode consiste en :
— une alimentation en 50 kV sous forme quasi symétrique du
système caténaire-feeder ;
— une alimentation en 25 kV sous forme dissymétrique des
engins moteurs eux-mêmes ;
— une installation, à des pas variables de quelques kilomètres,
d’autotransformateurs entre la caténaire et le feeder, avec raccorde-
ment du point milieu de l’autotransformateur au rail.
Les caractéristiques intéressantes de cette alimentation
« 2 x 25 kV » sont :
— la réduction de l’intensité transportée (
U
= 50 kV) ;
— la faible longueur de la boucle perturbatrice (grâce à la réparti-
tion des autotransformateurs).
L’effet réducteur apporté par ce système d’alimentation sur la nui-
sance créée sur les lignes de télécommunications riveraines est de
l’ordre de 4 par rapport à une alimentation classique « 1 x 25 kV »
pour un même courant psophométré mesuré au pantographe de
l’engin moteur.
1.2.3 Rayonnement électromagnétique
radiofréquence
On distingue deux sources principales de perturbations, qui sont
dues :
— aux courants harmoniques radiofréquences (9 kHz à 30 MHz) ;
—à l’arc électrique créé par le contact glissant pantographe-caté-
naire (30 MHz à 1 GHz).
Dans la bande 9 kHz à 30 MHz, les perturbations sont principale-
ment dues à la caténaire qui, véhiculant des courants harmoniques
générés par les trains, se comporte comme une antenne et émet un
champ magnétique parasite.
Dans la bande 30 MHz à 1 GHz, le facteur perturbant dominant est
le contact glissant entre le pantographe et la caténaire qui constitue
une source de champ électrique parasite.
Au-dessus de 1 GHz, les niveaux d’émission rayonnée sont faibles
et vite atténués avec la distance.
Essais en rayonnement
Les essais sont réalisés dans les bandes de fréquence suivantes :
9 kHz à 30 MHz pour le champ magnétique
H
et 30 MHz à 1 GHz pour
le champ électrique
E
, initialement en l’absence, puis en présence,
de la source mobile ferroviaire.
On utilise plusieurs modèles d’antennes :
— antenne cadre (9 kHz à 30 MHz) pour la mesure du champ
magnétique ;
— antenne biconique (30 MHz à 300 MHz) pour la mesure du
champ électrique ;
— antenne log-périodique (300 MHz à 1 GHz) pour la mesure du
champ électrique.
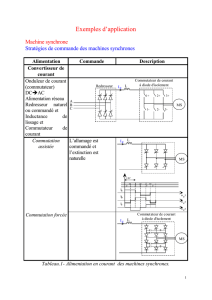
La figure 3 présente un résultat de mesure de l’enveloppe du
champ électromagnétique rayonné par une rame TGV-Atlantique en
circulation sur le réseau 25 kV à 50 Hz. La mesure est effectuée à
10 m du centre de la voie au moment du passage de la rame.
Ces résultats de mesure sur le TGV-A montrent que la courbe
enveloppe du rayonnement électromagnétique est inférieure d’au
moins 7 dB par rapport aux limites indiquées par la norme
EN 50121-2 (interaction CEM entre le domaine ferroviaire et l’envi-
ronnement public).
Il s’ensuit que les précautions prises à la conception des équipe-
ments embarqués et au câblage de ces équipements dans le train
permettent de respecter – sans difficulté – les limites du rayonne-
ment électromagnétique définies par les normes CEM. En pratique,
les courants harmoniques générés par le train sur l’alimentation
n’ont plus d’effet sur le champ magnétique ambiant au-delà d’envi-
ron 5 MHz.
Figure 2 – Système d’alimentation à autotransformateur
Remarque : la répartition des courants indiquée est théorique
Rails
Sous-
station
50 kV
Caténaire I/2 II = 0
I/2 I = 0Feeder
Zone perturbatrice
limitée à la cellule occupée
Figure 3 – TGV-A : mesure de l’enveloppe du champ
électromagnétique rayonné
Bande passante du récepteur de mesure de
H
: 1 kHz jusqu'à 150 kHz et 9 kHz au-delà
Bande passante du récepteur de mesure de
E
: 120 kHz
10 kHz 100 kHz 1 MHz 10 MHz 100 MHz 1 GHz
0
20
40
60
80
100
Fréquence (en log)
Courbe en trait mixte :
limite indiquée par la norme EN 50121-2
dans ce contexte
H
(dB mA/m)
E
(dB mV/m)
H
E
Reproduction de la mesure CEM
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
1
/
39
100%