Chapitre 2 Entraînement avec machine DC - HEIG-VD

HEIG-Vd Entraînements réglés (MET2)
Chapitre 2
Entraînement avec machine DC
2.1 Introduction
La machine à courant continu à collecteur à excitation séparée (ci-après ma-
chine DC) a été longtemps le type d’entraînement le plus utilisé pour les ap-
plications à vitesse variable. Son côté attractif provient en grande partie de la
simplicité de sa commande, ce qui a une incidence directe sur le niveau des per-
formances, que l’on parle en termes d’asservissement ou en termes économiques.
Dans une plage de puissance allant de 500 [W]à50 [kW], la machine DC est
désormais très fortement concurrencée et de plus en plus souvent remplacée par
des entraînements AC sans balais, i.e. "à courant alternatif", de types synchrones
auto-commutés ou asynchrones (chap. 3 et 4).
Néanmoins, l’étude détaillée de la commande des servo-entraînements DC
et de quelques problèmes particuliers garde tout son sens : la facilité avec la-
quelle un tel entraînement peut être commandé en couple constitue en effet un
avantage déterminant sur les performances obtenues, au point que l’on cherchera
ultérieurement à appliquer la même stratégie de commande à des entraînements
AC synchrones auto-commutés et asynchrones. Ceci pourra se faire au moyen
d’une stratégie de pilotage évoluée qu’est la commande vectorielle, permettant
en quelque sorte d’émuler la machine DC partant d’un machine synchrone au
asynchrone.
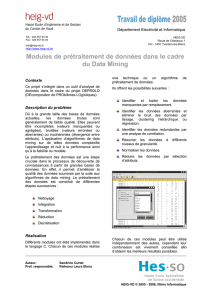
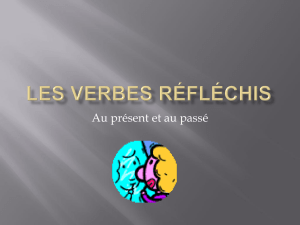
L’objectif principal de ce chapitre est de présenter une solution d’asservisse-
ment en vitesse et en couple (figure 2.2 page suivante) de la machine DC permet-
M
Fig. 2.1 – Symbole d’une machine DC à collecteur (fichier source).
v.1.6 53 MEE \cours_er.tex\6 mars 2006

HEIG-Vd Entraînements réglés (MET2)
Te m
Te m c
A s s e r v i s s e m e n t
d e c o u p l e
C h a r g e
m é c a n i q u e
C a p t e u r d e
v i t e s s e
R é g u l a t e u r
d e v i t e s s e
S
-
c o n s i g n e
d e v i t e s s e
m e s u r e
d e v i t e s s e
v i t e s s e
M o d è l e s d e
l ' a l i m e n t a t i o n
e t d u m o t e u r
M o d è l e s d u
m o t e u r e t d e
l a c h a r g e
m é c a n i q u e
f _ 0 2 _ b _ 1 1 _ 0 1 . e p s
f _ 0 2 _ b _ 1 1 _ 0 3 . e p s
Fig. 2.2 – Structure de l’asservissement de vitesse d’une machine DC : un as-
servissement de couple/courant est également nécessaire (régulation cascade de
vitesse et couple/courant) (fichier source).
tant d’atteindre les performances exigées d’un servo-entraînement, au sens de ce
qui a été présenté au chap.1. On abordera successivement la modélisation la ma-
chine DC à collecteur avant d’étudier son alimentation par variateur de courant
continu. Un modèle dynamique de ce dernier sera obtenu. Il sera alors possible
de se pencher sur la question de l’asservissement de couple puis enfin sur celui
de vitesse / position pour lequel la solution classique de régulation cascade sera
proposée.
2.2 Modélisation mathématique
2.2.1 Rappel : construction et fonctionnement du moteur
DC
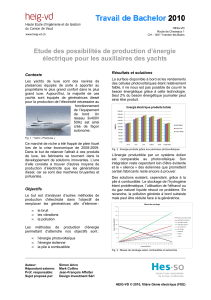
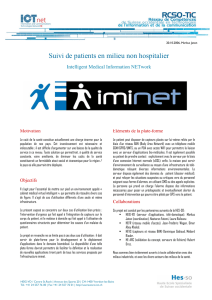
La figure 2.3 page ci-contre montre un entraînement DC à excitation séparée
de l’entreprise Maxon. Pour l’essentiel, on rappelle que le moteur DC à collecteur
est constitué d’une partie fixe (le stator) et d’une partie tournante (le rotor ). Ce
dernier comporte un circuit électrique (l’induit) alors que le stator peut être muni
soit également d’un circuit électrique, soit d’un aimant permanent. Le stator joue
le rôle d’inducteur, sa fonction étant de créer un flux magnétique d’excitation Φf
(ou de manière équivalente un champ d’induction d’excitation Bf) dans lequel
seront plongées les spires du circuit d’induit. Si celles-ci sont parcourues par un
courant (le courant d’induit ia(t)), la force de Laplace ~
FL(t) = ia(t)·~
L×~
Bf
intervient (~
Lest la longueur active d’un conducteur de l’induit), et un couple
d’origine électromagnétique est alors produit.
L’excitation Φfcréée par l’inducteur peut être réalisée de 2 manières :
v.1.6 54 MEE \cours_er.tex\6 mars 2006

HEIG-Vd Entraînements réglés (MET2)
Fig. 2.3 – Moteur DC à excitation séparée de la firme Maxon (fichier source).
– elle est produite par un bobinage, auquel cas elle peut être ajustée à un
niveau dépendant du courant d’excitation if(t)traversant le circuit. On
a alors Φf(t) = k·if(t). Lorsque le bobinage d’excitation est électrique-
ment indépendant de celui de l’induit, on parle de moteur DC à excitation
séparée ;
– elle est créée au moyen d’un aimant permanent. Dans ce cas Φf=const. et
l’on parle de moteur DC à excitation séparée constante.
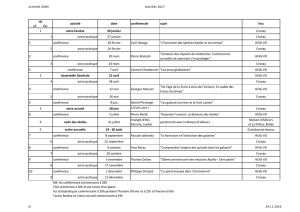
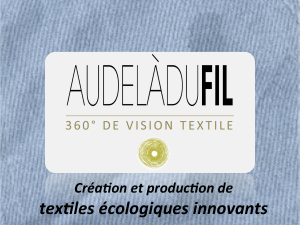
Le schéma technologique d’un entraînement DC à excitation séparée est repré-
senté sur la figure 2.4 page suivante. Les signaux y intervenant sont les suivants :
– la tension aux bornes de l’induit ua(t)(l’indice acorrespond à Anker, i.e.
induit en langue allemande) ;
– le circuit électrique de l’induit, faisant apparaître :
– la résistance de l’induit Ra;
– l’inductance de l’induit La;
– une contre-tension em(t)appelée FEM (Force Electro-Motrice), propor-
tionnelle à la vitesse angulaire ω(t);
– le courant traversant le circuit d’induit ia(t);
– le couple électromagnétique instantané Tem(t)produit ;
– l’inducteur, fixé au stator, créant un flux magnétique d’excitation Φf;
– la charge mécanique, dépendante de l’application (inertie J, frottement vis-
queux, élasticité de la transmission, etc) ;
v.1.6 55 MEE \cours_er.tex\6 mars 2006

HEIG-Vd Entraînements réglés (MET2)
ia( t )
ua( t )
L
a
R
a
J
M
p a l i e r s
w( t )
f _ 0 2 _ c _ 1 1 . e p s
F
f
Te m ( t )
Fig. 2.4 – Schéma technologique d’un entraînement DC à excitation séparée
(fichier source).
– la vitesse ω(t)du rotor du moteur.
Comme l’induit de la machine est physiquement lié au rotor, i.e. à la partie
tournante, cela constitue bien sûr un inconvénient pratique important, expli-
quant pourquoi l’on a tendance a vouloir remplacer de tels entraînements par
des moteurs AC : l’alimentation de l’induit, i.e. la transmission de la puissance
pa(t) = ua(t)·ia(t), doit en effet s’effectuer en faisant passer le courant d’induit
ia(t)de la partie fixe à la partie mobile au moyen d’un dispositif mécanique re-
lativement complexe, le collecteur. Celui-ci est constitué de balais solidaires du
stator et néanmoins en contact mécanique par frottement avec la partie mobile
afin de conduire le courant électrique ia(t)entre le stator et le rotor. L’usure en
résultant fait que les balais doivent être plus ou moins fréquemment remplacés,
selon les conditions de travail du moteur. Cette même usure entraîne l’apparition
de poussières et dégrade le contact électrique, ce qui se traduit par une augmen-
tation de la résistance du circuit d’induit, un échauffement supplémentaire voire
des arcs électriques. En effet, les microcoupures du contact électrique peuvent
provoquer des chutes de tension inductive La·dia
dt importantes, sachant que ia(t)
est typiquement un courant constant 6= 0 [A].
2.2.2 Equations caractéristiques
Prenant en compte la résistance Raet l’inductance Ladu circuit d’induit, du
collecteur, des balais et des connexions, et en les supposant toutes deux constantes
(pas de variation due à l’échauffement ni à la saturation magnétique), l’équation
de tension induite s’écrit :
ua(t) = Ra·ia(t) + dΨ
dt =Ra·ia(t) + d(N·Φf)
dt
=Ra·ia(t) + La·dia
dt +em(t)
(2.1)
v.1.6 56 MEE \cours_er.tex\6 mars 2006

HEIG-Vd Entraînements réglés (MET2)
La tension induite em(t), appelée FEM ("force électro-motrice" dans l’optique
de l’exploitation en générateur) est proportionnelle à la vitesse angulaire ω(t)et
au flux inducteur Φf(t):
em(t) = k·Φf(t)·ω(t)(2.2)
kest une constante dépendant de la construction de la machine. La première équa-
tion montre que em(t)s’oppose à ua(t), i.e. le moteur réagit en créant une FEM
em(t)tendant à équilibrer à ua(t). Cet effet correspondra à une contre-réaction
bien visible dans le schéma fonctionnel du moteur (figure 2.5 page suivante).
Le couple électromagnétique Tem(t)développé a pour expression :
Tem(t) = k·Φf(t)·ia(t)(2.3)
On constate ici un fait très important : le couple électromagnétique Tem(t)est
exactement proportionnel au courant d’induit ia(t).
Tem(t)∝ia(t)(2.4)
Les trois équations ci-dessus, complétées par l’équation de la dynamique,
Jt·dω
dt =Tem(t)−Rf t ·ω(t)−Tres(t)(2.5)
où Jtest l’inertie totale entraînée (moteur Jmet charge Jch), décrivent complè-
tement le comportement dynamique de la machine DC. Aucun des signaux n’est
supposé constant, ce qui permettra l’étude du régime transitoire.
2.2.3 Schéma fonctionnel
Les équations ci-dessus peuvent être avantageusement représentées graphique-
ment sous forme de schéma fonctionnel. On s’est restreint ici au cas où l’excitation
Φfest constante (comme par exemple dans le cas d’une excitation par aimant
permanent). De ce fait, le produit k·Φfest constant et l’on pose :
KT=KE=k·Φf(2.6)
En faisant l’hypothèse d’une excitation constante, on observe très clairement
sur ce schéma le rôle de la FEM em(t), qui opère en fait une contre-réaction interne
à la machine. Elle s’oppose aux variations de la tension d’alimentation ua(t). A
l’équilibre, la vitesse est constante et la FEM est telle que le courant d’induit ia(t)
crée le couple électromagnétique Tem(t)compensant le couple résistant Tres(t).
Cette contre-réaction explique pourquoi la machine atteint une vitesse constante
stable dès qu’elle est alimentée par une tension constante. On voit que d’une
certaine manière, on peut, à l’aide de la tension ua(t), imposer la vitesse ω(t).
Cependant, il ne s’agit pas d’un système asservi : le moteur reste en boucle ou-
verte, et si un couple résistant Tres(t), tel que du frottement sec, agit sur l’arbre,
la vitesse en régime permanent aura une valeur inférieure à sa valeur à vide ω0i
(§ 2.2.6 page 61).
v.1.6 57 MEE \cours_er.tex\6 mars 2006
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
1
/
78
100%



{kind=link}