Rotor - Leroy Somer

Moteurs asynchrones triphasés fermés - Rotor à bagues
FLSB - FLSLB
37 kW à 300 kW
Catalogue technique
1239 fr - 2012.05 / i


3
FLSB-FLSLB Moteurs asynchrones triphasés fermés - Rotor à bagues
Leroy-Somer - FLSB-FLSLB Moteurs asynchrones triphasés fermés - Rotor à bagues - 1239 fr - 2012.05 / i
PAGES PAGES
Index ................................................ 4CARACTÉRISTIQUES ÉLECTRIQUES
Grilles de sélection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
FLSB - Usage général
INFORMATIONS GÉNÉRALES 4 pôles - 1 500 min–1 ................................... 24
Engagement Qualité .................................... 56 pôles - 1 000 min–1 ................................... 26
8 pôles - 750 min–1 ..................................... 28
ENVIRONNEMENT FLSLB - Levage et manutention
Dénition des indices de protection (IP) ...................... 64 pôles - 1 500 min–1 ................................... 25
Antiparasitage et protection des personnes ................... 76 pôles - 1 000 min–1 ................................... 27
8 pôles - 750 min–1 ..................................... 29
CONSTRUCTION
Désignation ........................................... 8DIMENSIONS
Pièces constitutives ..................................... 9Bouts d‘arbre ......................................... 30
Descriptif ............................................. 9Pattes de xation IM B3 (IM 1001) ......................... 31
Cas particulier des moteurs FLSLB usage levage .............. 9Pattes et bride de xation à trous lisses IM B5 (IM 2001) ........ 32
Formes de construction et positions de fonctionnement ........ 10 Bride de xation à trous lisses IM B5 (IM 3001) ............... 33
Roulements .......................................11 à 13
Type de roulements - charges axiales ...................... 11
Charges radiales à E/2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 ÉQUIPEMENTS OPTIONNELS
Intervalles de graissage ................................. 13 Moteurs usage levage FLSLB ............................ 34
Balais et porte-balais ................................... 13
Raccordement au réseau. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Les boîtes à bornes stator et rotor ......................... 14 INSTALLATION ET MAINTENANCE
Tableau des presse-étoupe .............................. 14 Identication ......................................... 35
Planchettes à bornes - sens de rotation ..................... 15 Plaque signalétique .................................... 35
Schémas de branchement ............................... 15
Borne de masse ....................................... 15
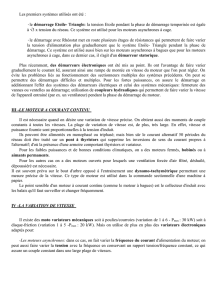
Démarrage. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 ANNEXES
Formules simples utilisées en électrotechnique ............36 - 37
Tolérance des grandeurs principales ....................... 38
FONCTIONNEMENT
Dénition des services types ..........................16 à 18
Tension d’alimentation .................................. 19
Règlements et normes .................................. 19
Utilisation des moteurs 400 V - 50 Hz
sur des réseaux 460 V - 60 Hz ............................ 19
Détermination de la puissance en régime intermittent .......... 19
Vibrations et équilibrage .............................20 - 21
Optimisation de l’utilisation .............................. 22
Sommaire

4
FLSB-FLSLB Moteurs asynchrones triphasés fermés - Rotor à bagues
Leroy-Somer - FLSB-FLSLB Moteurs asynchrones triphasés fermés - Rotor à bagues - 1239 fr - 2012.05 / i
PAGES
Antiparasitage ......................................................................7
Boîte à bornes ....................................................................14
Borne de masse ..................................................................15
Branchement ......................................................................15
Bride ............................................................................ 32 - 33
Charge axiale admissible .................................................... 11
Charge radiale admissible ..................................................12
Clavette ..............................................................................20
Démarrage..........................................................................15
Dimensions ................................................................. 30 à 33
Environnement ................................................................ 6 - 7
Equilibrage................................................................... 20 - 21
Graissage ...........................................................................13
Grille de sélection ....................................................... 24 à 29
Indice de protection...............................................................6
ISO 9001...............................................................................5
Levage............................................................. 9-25-27-29-34
PAGES
Niveau de vibration ...................................................... 20 - 21
Numéro de série .................................................................35
Options ...............................................................................34
Parasites...............................................................................7
Planchettes à bornes ..........................................................15
Plaque signalétique ............................................................35
Position de fonctionnement.................................................10
Protection thermique...........................................................22
Puissance ........................................................................... 19
Qualité ..................................................................................5
Raccordement ............................................................. 14 - 15
Schéma de branchement ....................................................15
Sens de rotation ..................................................................15
Tension d’alimentation ........................................................19
Vibrations..................................................................... 20 - 21
Index

5
ISO 9001 : 2008
FLSB-FLSLB Moteurs asynchrones triphasés fermés - Rotor à bagues
Informations générales
Leroy-Somer - FLSB-FLSLB Moteurs asynchrones triphasés fermés - Rotor à bagues - 1239 fr - 2012.05 / i
Engagement Qualité
Leroy-Somer a coné la certication de son savoir-faire à des organismes internationaux.
Ces certications sont accordées par des auditeurs professionnels et indépendants qui constatent le bon fonctionnement du
système assurance qualité de l’entreprise. Ainsi, l’ensemble des activités, contribuant à l’élaboration du produit, est
ofciellement certié ISO 9001: 2008 par le DNV. De même, notre approche environnementale a permis l’obtention de la
certication ISO 14001 : 2004.
Les produits pour des applications particulières ou destinés à fonctionner dans des environnements spéciques, sont également
homologués ou certiés par des organismes : LCIE, DNV, INERIS, EFECTIS, UL, BSRIA, TUV, GOST, qui vérient leurs
performances techniques par rapport aux différentes normes ou recommandations.
Le système de management de la
qualité Leroy-Somer s’appuie sur :
- la maîtrise des processus depuis la
démarche commerciale de l’offre jusqu’à
la livraison chez le client, en passant par
les études, le lancement en fabrication
et la production.
- une politique de qualité totale fondée
sur une conduite de progrès permanent
dans l’amélioration continue de ces
processus opérationnels, avec la
mobilisation de tous les services de
l’entreprise pour satisfaire les clients en
délai, conformité, coût.
- des indicateurs permettant le suivi des
performances des processus.
- des actions correctives et de progrès
avec des outils tels que AMDEC, QFD,
MAVP, MSP/MSQ et des chantiers
d’améliorations type Hoshin des ux,
reengineering de processus, ainsi que le
Lean Manufacturing et le Lean Ofce.
- des enquêtes d’opinion annuelles, des
sondages et des visites régulières
auprès des clients pour connaître et
détecter leurs attentes.
Le personnel est formé et participe aux
analyses et aux actions d’amélioration
continu des processus.
- Les moteurs de ce catalogue ont fait
l’objet d’une étude toute particulière pour
limiter l’impact de leur construction sur
l’environnement. Cette éco-conception se
traduit par la création d’un “Prol
Environnemental Produit” (référence
4592).
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
1
/
40
100%