STI GE

STI GE
Lycée RENAUDEAU
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE ELECTRIQUE
PAGE : 14
2-2-3-6 Fonction Convertir l’énergie
Electrotechnique
Introduction :
La conversion de l’énergie électrique en énergie mécanique est réalisée à l’aide
d’actionneurs appelés moteurs.
Selon le type d’application et le type de mouvement à transmettre, on utilisera soit un
moteur, soit un vérin. La part du moteur électrique est très importante dans le domaine
industriel (machines outils,…) mais aussi dans les applications domestiques (lave linge,…).
Un moteur pour quoi faire ???
Un moteur est toujours accouplé à une
charge.
Il entraîne la charge soit en rotation
(ventilateur, mandrin, poulie,…) soit, par une
mécanique adaptée, en translation (téléski,
pont roulant,…).
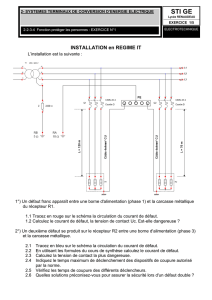
Quelles sont les caractéristiques des charges entraînées ?
Tout dépend de la charge. Les efforts nécessaires pour transmettre le mouvement ne sont
pas identiques, et peuvent être très variables d’une application à une autre.
Des familles types de charges peuvent néanmoins être identifiées :
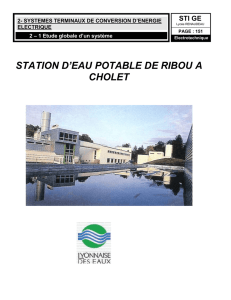
La caractéristique du couple résistant (Tr) en fonction de la vitesse (
Ω
) traduit les efforts
nécessaires à l’entraînement de la charge.
Tr (Nm)
Couple constant
Tr (Nm)
Couple quadratique
Tr (Nm)
Couple hyperbolique
Tr (Nm)
Couple linéaire
Ω
(
rd/s)
Ω
(
rd/s)
Ω
(
rd/s)
Ω
(
rd/s)
Tr = C
te
90% des applications : engins de
levage, bandes transporteuses,…
Tr = k.
Ω
2
ventilateurs, pompes
centrifuges,…
Tr =
Ω
k
enrouleur-dérouleur,
machines outils,…
Tr = k.
Ω
vis d’archimède
Quel que soit le type de moteur utilisé pour entraîner la charge, il devra impérativement être choisi
pour répondre au besoin de la charge. Son couple moteur (Tu) devra être supérieur au couple
résistant de la charge (Tr), du moins, pendant la phase de démarrage.
ENERGIE
MECANIQUE
Moteur
Accouplement
Machine
ENERGIE ELECTRIQUE
Couple constant :
90% des applications, levage,
bandes transporteuses
Couple hyperbolique :
Enrouleur dérouleur,
machines outils
Couple quadratique :
Ventilateur, pompes
centrifuges
Couple linéaire :
Vis d’Archimède
laminoir

STI GE
Lycée RENAUDEAU
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE ELECTRIQUE
PAGE : 15
2-2-3-6 Fonction Convertir l’énergie
Electrotechnique
Quel type de moteur ?
La conversion de l’énergie s’effectue à 80% à l’aide de moteurs asynchrones triphasés grâce
à leur simplicité de construction, à leur robustesse et à leur facilité de démarrage.
1- Le moteur asynchrone triphasé
Le moteur asynchrone est le convertisseur électromécanique qui, historiquement, a été le
dernier construit. En effet, ce n’est qu’en 1888 que FERRARIS et TESLA ont réalisé le
premier moteur d’induction industriel. Le premier moteur à cage fut réalisé par DOLIVO-
DOBROWOLSKI en 1889 et le moteur à double cage par BLONDEL en 1892. Quelques
années auparavant, GRAMME avait déjà construit le premier alternateur (1878) et la
première machine à courant continu (1869).
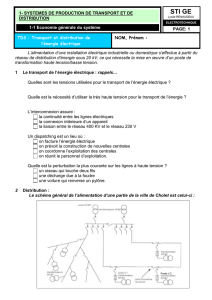
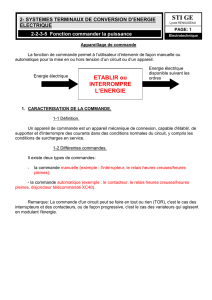
MOTORISATIONS
Moteur SYNCHRONEMoteur à COURANT CONTINU Moteur ASYNCHRONE
Moteur triphasé alternatif Moteur pas à pas
Moteur ASYNCHRONE
triphasé
Moteur ASYNCHRONE
monophasé
Avantages :
- Bonne régulation de vitesse
- Couple à l’arrêt
Inconvénients :
- Collecteur et balai à entretenir
(maintenance)
- prix
Moteurs dérivés
- Moteur rotor plat (Axem)
- Moteur série
- Moteur série universel (monophasé
perceuse)
Avantages :
- vitesse constante
- Cos phi = 1
Inconvénients :
- pas de couple au démarrage (sauf si
autopiloté en variation de vitesse)
- démarrage en asynchrone
Avantages :
- vitesse fixe
- positionnement en boucle ouverte
(pas de capteur : codeur incrémental)
Limites d’utilisations :
- faible puissance
- faible précision
- pas de vitesse proche de zéro
Avantages :
- robuste et simple (moteur à cage)
- standardisation (disponibilité et
prix)
Inconvénients :
- glissement/vitesse
Mode de
démarrage :
- à enroulement
auxiliaire et capacité pour
déphasage du flux
Utilisations :
- Electro-ménagé
Machine de Jacobi 1834
Machine de Froment 1940

STI GE
Lycée RENAUDEAU
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE ELECTRIQUE
PAGE : 16
2-2-3-6 Fonction Convertir l’énergie
Electrotechnique
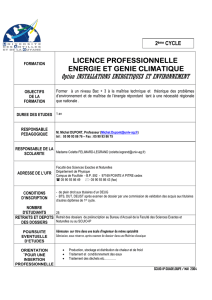
1
2
3
4
5
6
7
8
9
10
11
7
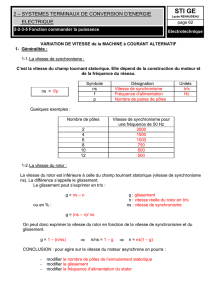
Principe de fonctionnement.
Création d’un champ tournant en triphasé.
Si on alimente 3 bobines identiques, placées à 120 °, par une tension alternative triphasée :
- Une aiguille aimantée, placée au centre, est entraînée
en rotation; il y a donc bien création d'un champ
tournant.
- Un disque métallique en aluminium ou en cuivre est
entraîné dans le même sens que l'aiguille aimantée.
- Si l'on inverse deux des trois fils de l'alimentation
triphasée, l'aiguille ou le disque, tourne en sens
inverse.
Justification : Les trois champs alternatifs produits par
les bobines alimentées en courant triphasé se composent
pour former le champ tournant.
Le champ magnétique tournant crée dans le circuit du rotor des courants induits ; ceux-ci, d'après
la loi de Lenz, s'opposent à la cause qui leur a donné naissance, et provoquent une force
magnétomotrice qui entraîne le rotor en rotation (cf. cours de Physique Appliquée).
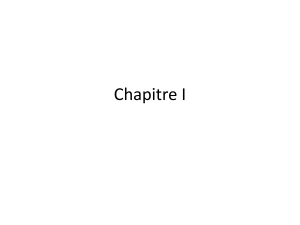
1-1 Constitution générale d'un moteur asynchrone.
Quels que soient les constructeurs de machines tournantes, nous constatons une très
grande stabilité des techniques de construction. Par contre, les adaptations de moteurs à
différentes applications sont de plus en plus nombreuses : moteur-réducteur, moteur-frein,
moto-pompe, génératrice asynchrone, etc.
Rep.
Désignation
Rep.
Désignation
1
Flasque avant
7
Roulements
2
Rotor (cage d’écureuil)
8
Flasque arrière
3
Bobinage du stator
9
Ventilateur
4
Carcasse
10
Tiges d’assemblage

STI GE
Lycée RENAUDEAU
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE ELECTRIQUE
PAGE : 17
2-2-3-6 Fonction Convertir l’énergie
Electrotechnique
5
Plaque signalétique
11
Capot protection ventilateur
6
Boîtier de raccordement : plaque à bornes
On classe les différentes pièces rencontrées dans toute machine tournante selon les trois
grandes fonctions réalisées :
• Organes électriques :
- Circuit rotorique, en court-circuit ou bobiné,
- Circuit statorique bobiné,
- Plaque à bornes.
• Organes magnétiques :
Circuits magnétiques statorique et rotorique.
• Organes mécaniques :
Carcasse supportant les flasques, roulements, arbre, ventilateur, tiges de
montage et fixation du moteur.
Circuit magnétique.
Le circuit magnétique des machines à courant alternatif et des moteurs asynchrones en
particulier, doit canaliser les lignes de forces du champ tournant.
Conditions à remplir :
• Avoir des pertes par hystérésis et courants de Foucault minimum.
• Supporter les bobinages.
• Comporter une partie fixe et une partie mobile.
• Être refroidi convenablement.
Solutions communes au stator et au rotor :
• Canalisation du flux par des tôles magnétiques placées dans le sens radial, en
forme d’anneaux pour le stator et en forme de disques pour le rotor.
•
Utilisation de tôles d’épaisseur 0,35 à 0,5 mm en acier au silicium, ayant des pertes
de 1,4 à 2,6 W/kg, pour diminuer les pertes par hystérésis et courants de Foucault.
En général, ces tôles sont isolées par oxydation ou par un vernis isolant pour les très
grosses machines.

STI GE
Lycée RENAUDEAU
2 – SYSTEMES TERMINAUX DE CONVERSION D’ENERGIE ELECTRIQUE
PAGE : 18
2-2-3-6 Fonction Convertir l’énergie
Electrotechnique
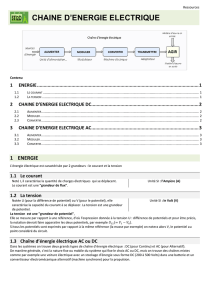
Les encoches de différentes formes permettent de loger les conducteurs du bobinage
électrique.
Le circuit magnétique statorique fixe est le siège du champ tournant qui agit sur le rotor.
Solutions particulières au stator :
• Fixation en rotation et en translation.
• Pour les gros moteurs, la carcasse peut être en acier moulé ou en tôle d’acier roulée
et soudée, pour les diamètres supérieurs à un mètre. Les tôles magnétiques sont
réalisées par secteurs et serrées entre elles par des rivets; elles sont centrées dans
des nervures et maintenues serrées par deux plateaux prenant appui sur des butées
soudées.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%