TP1, Moteur asynchrone

MC53
⎯
Actionneurs
TP1 : moteur asynchrone triphasé
⎯
P2002
François Deleu
David Perrin
UTBM – GMC04

MC53 TP1 : moteur asynchrone triphasé
- 2 -
1. THEORIE
1.1. Désignation
• plaques signalétiques
• définition des symboles
MOT 3 ~ Moteur triphasé alternatif
LS Série
80 Hauteur d'axe
L Symbole de carter
T Indice d'imprégnation
N° Numéro série moteur
B Année de production
J Mois de production
002 N° d'ordre dans la série
Code Réservé
kg Masse
IP55 Indice de protection
I cl. F Classe d'isolation F
40 °C Température d'ambiance maxi de fonctionnement, selon CEI
34-1
S…% Service - Facteur de marche
... c/h Nombre de cycles par heures
V Tension d'alimentation
Hz Fréquence d'alimentation
min-1 Nombre de tours par minute
kW Puissance nominale
cos ϕ Facteur de puissance
A Intensité nominale
Δ Branchement triangle
Y Branchement étoile
DE Drive End roulement côté entraînement
NDE Non drive end roulement côté opposé à l'entraînement
50 g Quantité de graisse à chaque relubrification (en grammes)
3 900 h Périodicité de relubrification (en heures)
UNIREX N3 Type de graisse
n.b.: La puissance inscrite sur la plaque signalétique est la puissance nominale utile sur
l'arbre Pu (puissance mécanique).

MC53 TP1 : moteur asynchrone triphasé
- 3 -
1.2. Branchement des moteurs asynchrones triphasés
1.2.1. Plaque à bornes
Les moteurs standards sont équipés d’une
plaque de 6 bornes repérées (cf. figure)
Lorsque le moteur est alimenté en U1, V1, W1
par un réseau L1, L2, L3, il tourne dans le
sens horaire pour un observateur placé en
bout d’arbre
En permutant 2 phases d’alimentation, le
moteur change de sens de rotation
1.2.2. Couplages
exemple : moteur 3 x 230 V / 3 x 400 V
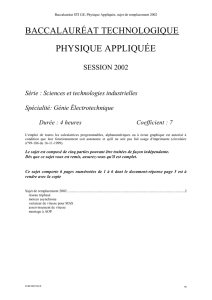
1.3. Principes de variation de la vitesse de rotation (moteur asynchrone)
1.3.3. caractéristiques mécanique C=f(N)
• variation de la fréquence • variation de la tension
N/Ns
(tr/min)
C/Cn
(N.m)
N/Ns
(tr/min)
C/Cn
(N.m)
principe couramment utilisé (et qui sera le
dernier point de ce TP). Il y a conservation
du rendement pour toute fréquence
Principe peu utilisé (seulement pour de
petites variations). Il y a réduction du
glissement et donc du rendement

MC53 TP1 : moteur asynchrone triphasé
- 4 -
2. PRATIQUE
2.1. Etalonnage du capteur de couple
2.1.1. schématisation
x
L
l
d
D
G
F
P
mbm
données
L=1 m
mb=168
g
m=200 g
d=17
2.1.2. étalonnage à vide
• calcul du moment :
Le moment théorique à vide (tenant uniquement compte masse mb de la barre) doit
tenir compte du diamètre de la culasse du frein, on obtient :
mNgm
dL
CFC .838,0
2
00 =⋅⋅
+
=⇔⋅Δ=
• mesure du capteur :
On appellera c, la mesure effectuée par le capteur de couple. Celle-ci vaut 45 mV
• rapport du capteur :
La relation entre couple et tension est linéaire, le rapport permettant de relier ces
deux variables est donné par la relation :
05375,0
0== C
c
k
2.1.3. étalonnage pour C=2 N.m
• calcul du moment :
On déduit la longueur permettant d’avoir un couple C2 de 2 N.m :
m
D
gm
C
lgm
D
lCPC 5841,0
22 2
22 =−
⋅
=⇒⋅⋅
⎟
⎠
⎞
⎜
⎝
⎛+=⇔⋅Δ′
=
• mesure du capteur :
La mesure effectuée par le capteur de couple permet d’obtenir c’=150 mV
• rapport du capteur :
On à vu précédemment que le rapport du capteur devait être constant
. Or avec les données du chargement, on trouve :
(
05375,0≈k
)
0719,0
2=
′
=
′C
c
k
D’où …Après vérification, l’erreur proviendrait en fait du capteur de couple ;
le corps d’épreuve étant mal installé, il réagit aux turbulences extérieures
(secousses).
kk ≠
′

MC53 TP1 : moteur asynchrone triphasé
- 5 -
2.2. Courbes de fonctionnement d’un moteur asynchrone triphasé à cage
2.2.1. Couplage
Le réseau est 230/400 V, cela signifie 230 V entre phase et neutre et 400 entre
phases.
Le moteur est D 230 V et Y 400 V, cela signifie que chacune de ses bobines
pourront recevoir au maximum 230 V pour un montage en triangle et 400 V pour
un montage en étoile. Le réseau délivrant 400 V par phases, on choisira donc un
montage en étoile.
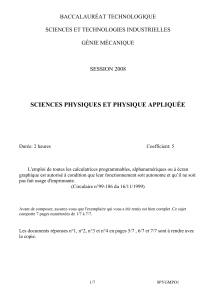
2.2.2. Câblage
fig 1. schéma de câblage de l’interface
unité
centrale
capteur
vitesse
frein à
poudre
capteur
couple
2.2.3. Caractéristiques
• évolutions de la vitesse de rotation et du couple
On mesure la vitesse de rotation
du moteur ainsi que le couple par
le capteur de couple.
On applique 2 rampes de freinage
durant la période d’échantillonnage
dont la période est définie comme
suit :
rampe de freinage
0
20
40
60
80
100
012345
s
% frein
Ces courbes permettent bien de
vérifier la relation reliant le couple
à l’ inverse de la vitesse de rotation
d’un moteur.
moteur
réseau
3x 230/400 V
liaisons
terre
interface
voltmètre
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%