Le Programme

1
Contrôle de la vitesse d'un moteur à courant
continue par PWM
I) Introduction :
1- Microcontrôleurs PIC:
Un microcontrôleur est une unité de traitement et d’exécution de
l'information à laquelle on a ajouté des périphériques internes permettant
de réaliser des montages sans nécessiter l’ajout de composants annexes. Un
microcontrôleur peut donc fonctionner de façon autonome après
programmation.
Les PIC intègrent une mémoire de programme, une mémoire de données,
des ports d'entrée-sortie (numériques, analogiques, MLI, UART, bus I²C, etc.),
et même une horloge, bien que des bases de temps externes puissent être
employées. Certains modèles disposent de port et unités de traitement de
l'USB.
PIC 16F:
Les PIC de la famille 16C ou 16F sont des composants de milieu de gamme.
C'est la famille la plus riche en termes de dérivés.
La Famille 16F dispose dorénavant de 3 sous-familles :
- La sous-famille avec le cœur Baseline : instructions sur 12 bits (PIC16Fxxx)
- La sous-famille avec le cœur Middle-Range : instructions sur 14 bits
(PIC16Fxxx)
- La sous-famille avec le cœur Enhanced : instructions sur 14 bits
(PIC16F1xxx)
2- PWM (Pulse-width modulation) :
Pulse-width modulation (ou modulation de largeur d'impulsions) est une
technique couramment utilisée pour synthétiser des signaux continus à l'aide
de circuits à fonctionnement tout ou rien, ou plus généralement à
états discrets.

2
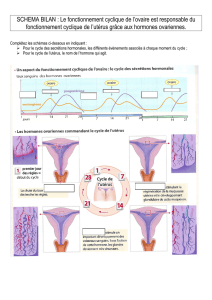
Le principe général est qu'en appliquant une succession
d'états discrets pendant des durées bien choisies, on peut obtenir en
moyenne sur une certaine durée n'importe quelle valeur intermédiaire.
Dans cette image, la PWM est simplement une impulsion qui a :
Ton Toff T (totale)
Quel est l'avantage d'utiliser PWM ?
- Contrôle des signaux analogiques en utilisant des signaux numériques.
Comment ?
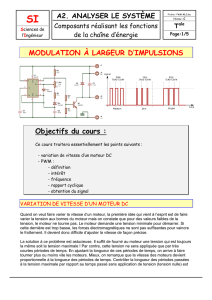
- Le Rapport Cyclique (Duty Cycle) :
La relation entre Vout, Vin et D :

3
Exemple :
Dans le PIC Microcontrôleur, Vin= 5 V
Si D = 0.5 (50%) alors :
Vout = 0.5 * Vin = 2.5 V
Alors, la tension de sortie d’un PIC est limitée entre 0-5V (se varie selon le
rapport cyclique).
Dans le PIC 16F876A, le signal PWM peut être généré d’un les deux ports
(RC1, RC2).

4
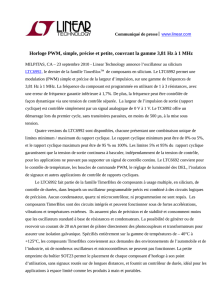
* Notre intérêt est d’appliquer cette technique pour contrôler la vitesse d’un
MCC.
Si on alimente un Moteur à courant continue avec un signal PWM (avec une
amplitude constante), la vitesse du moteur va se varier en fonction de la
vitesse moyenne (Vout).
On peut clairement noter que la vitesse du M2 est plus grande que celle-ci
du M1, à cause de la différence du rapport cyclique.

5
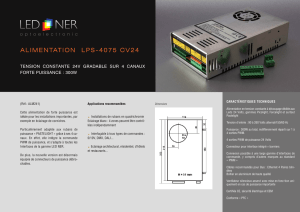
II) Câblage :
Composants principaux :
- PIC 16F876A ;
- 2 Boutons ;
- Circuit L298 (ou transistor) ;
- Moteur à courant continu (6 V)
Pourquoi utilise-t-on un PIC16F876A ?
- Ce genre des microcontrôleurs est capable de générer un signal PWM
(qu'on peut changer son rapport cyclique), ainsi qu’il y est très disponible
dans le marché.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%